基于動態RBF網絡辨識和模糊控制的彈道落點預測導引研究
2017-03-16 03:35:15馮耀暄薄學綱
兵器裝備工程學報 2017年2期
馮耀暄,薄學綱
(1.中北大學機電工程學院,太原,030051; 2.江蘇永豐機械有限責任公司,南京 210014)
【信息科學與控制工程】
基于動態RBF網絡辨識和模糊控制的彈道落點預測導引研究
馮耀暄1,薄學綱2
(1.中北大學機電工程學院,太原,030051; 2.江蘇永豐機械有限責任公司,南京 210014)
針對目前遠程彈道修正火箭彈中,濾波外推落點預測導引法存在導引系數確定難、導引精度低、自適應性與魯棒性差的問題,提出了一種基于動態RBF神經網絡在線辨識與帶自調整因子模糊控制相結合的落點預測導引律。具體在傳統濾波外推落點預測導引法的基礎上,將預測落點偏差與偏差變化率作為模糊控制器輸入量,通過RBF神經網絡在線整定模糊控制的權重因子和比例因子,實現導引指令的自適應調整。仿真結果表明,同常規方法相比,在充分考慮隨機擾動和測量誤差情況下,具有更強的自適應性與魯棒性,保持了較高的導引精度。
修正彈;濾波外推; RBF神經網絡;模糊控制;落點預測
隨著火箭推進技術的發展,遠程彈道修正火箭彈已經表現出在射程上的強大競爭優勢。同時,彈道特征也更加復雜化,飛行時間長、飛行速度涵蓋范圍更廣、飛行高度涵蓋了稠密大氣層到稀薄大氣層的更大空域,彈道過程中受到的隨機擾動更加明顯,系統誤差的積累更大。這就要求火箭彈制導控制方法在確保導引精度的同時,對隨機擾動和系統誤差的調整具有更高的魯棒性和自適應性。
濾波外推落點預測導引法,是目前彈道修正火箭彈廣泛應用的一種制導方法。其工作原理為:彈載傳感器實時測量彈體運動參數,后經濾波處理代入線性化彈道方程外推得到落點位置偏差及偏差變化率,進而再通過線性導引方程形成舵機控制指令[1]。彈道末端修正效果與落點預測精度有關,還與導引方程密切相關。在提高預測精度方面,國內外學者進行了大量研究:李興隆等提出了線性彈道模型預測法,提高了六自由度彈道落點預測精度和解算速度[2];李超旺等將攝動理論應用到火箭彈落點預測中,分析了擾動情況下的彈道解算方法[3];Leonard 等提出了通過修正線性理論進行快速彈道預測的方法,減小了彈道方程線性化造成的預測誤差[4]。目前,在導引方程設計方面,將先進控制理論與落點預測導引法相結合的相關研究還不深入。
1 問題的提出
火箭彈末端修正為高動態過程,且實際存在各種隨機擾動和測量誤差。此外,為了有效地打擊低速機動目標,要求彈道落點滿足設定落角等多種角度約束,因此,要求設計的制導算法具備良好精度的同時,還應兼具一定的自適應性和魯棒性。而目前,濾波外推落點預測導引中,通常導引方程為關于落點位置偏差及偏差變化率的線性方程:

(1)

為了減小導引精度對衛星測量精度的依賴程度,文獻[2]提出了利用一定時間內的落點偏差量的加權平均值代替某時刻瞬態值,以提高導引算法的魯棒性,并給出了加權算法:
(2)

除此之外,通常上述方法中導引系數需要經過一系列的仿真計算、試驗和采用經驗公式計算確定,通過記錄樣本數據進行插值擬合得到近似的導引系數與擾動關系,作為彈體飛行導引系數在線調整的依據。但是,這種方法得到的樣本數據涵蓋范圍小,且一經確定不能改變,導引效果不理想,過程復雜且不通用,自適應性與魯棒性較差。
模糊控制是一種非線性智能控制方法,因無需對被控對象建立數學模型、構造容易、實現簡單而得到廣泛應用。帶自調整因子的模糊控制器,通過優化算法在線調整輸入量的權重因子改變控制規則,增強控制器的自學能力和自適應性,從根本上提高模糊控制性能。動態RBF神經網絡具有對非線性系統動態尋優逼近的能力,可作為帶自調整因子模糊控制器控制參數在線調整的依據。二者結合可以對常規濾波外推落點預測導引法的導引方程進行優化,增強自適應性和魯棒性,同時保持導引精度。因此,本文提出了一種基于模糊控制理論和動態RBF神經網絡在線辨識理論的落點預測導引法。
2 設計原理與方法
2.1 導引控制器總體設計


圖1 基于RBF網絡辨識和模糊控制的預測導引原理圖
2.2 自調整模糊控制器設計
帶自調整模糊控制原理如圖2所示,具體控制器解析表達式為[5]:
膨潤土礦床類型分為火山巖型、火山-沉積型、沉積型、侵入巖型四種,以沉積(含火山沉積)型為最多,儲量占全部儲量的70%以上。膨潤土礦的顏色有白色、乳酪色、淡灰色、淡黃綠色、淡紅色、褐紅色以及黑色、斑雜色等,具有油脂光澤、蠟狀光澤或土狀光澤,斷口常為貝殼狀或鋸齒狀。采出原礦有塊狀、微層紋狀、角礫狀、土狀及斑雜狀等,微細結構以泥質結構為主,也有變余火山碎屑、角礫凝灰及粉砂狀結構等。
U=-〈αE+(1-α)EC〉·Ku(0≤α≤1)
(3)
其中,α為權重因子,e為系統誤差,E、Ec為模糊化后的系統誤差和誤差變化率,Ku為輸出控制量的比例因子,通過調整α和Ku可以改變模糊控制器輸出。根據模糊控制原理,取E、Ec、U論域均為{-6 6}[5],E的模糊子集{NB,NM,NS,NO,PO,PS,PM,PB},Ec和U的子集為{NB,NM,NS,ZO,PS,PM,PB}。隸屬度函數曲線分別如圖3、圖4所示,形成的模糊規則如表1所示。
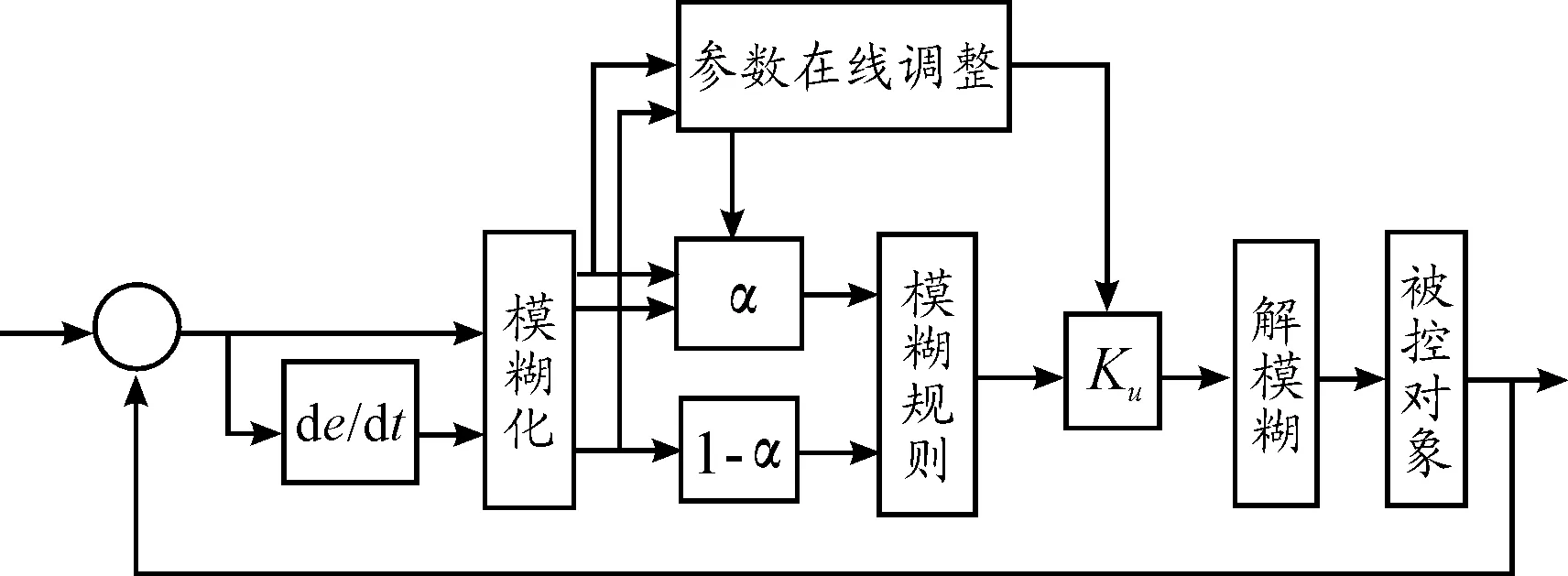
圖2 帶自調整因子的模糊控制原理圖
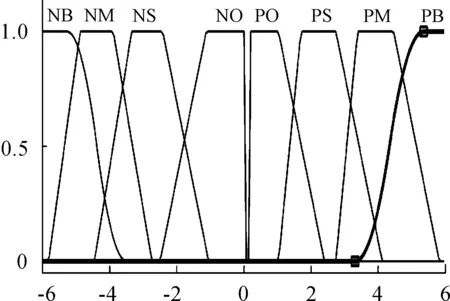
圖3 輸入量E的隸屬函數曲線
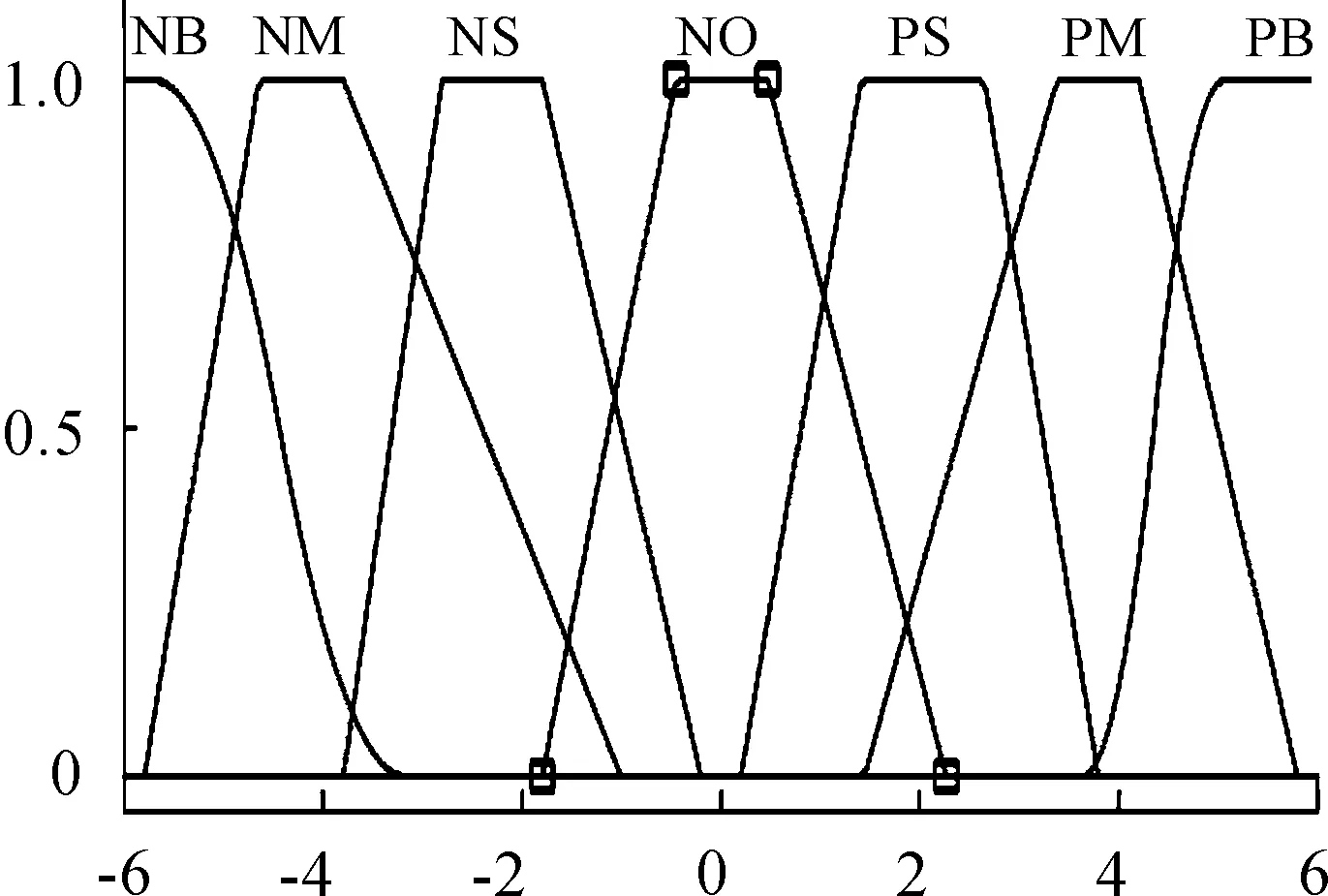
圖4 輸入EC和輸出U的隸屬函數曲線

ECENBNMNSNOPOPSPMPBNBPBPBPBPBPBPMPSZONMPBPBPMPMPMPSZONSNSPBPBPMPSPSZONMNMZOPBPMPSPSZONSNMNMPSPMPMZOZONSNMNBNBPMPSZONSNMNMNMNBNBPBZOPSNMNBNBNBNBNB
具體參數在線調整準則:當誤差較大時,控制器主要任務是減少誤差,提高響應速度,應該增大誤差權重和比例因子系數。相反,誤差減小時,控制器主要任務是盡快進入穩態,減小超調,應該增大誤差變化率的權重,減小比例因子系數。因此,參數調整的一種線性表達式為:
(4)
Ku(k)=Ku(k-1)+kupE(k-1)+
(5)
其中,N為輸入誤差的量化等級,kup、kui、kud為比例因子計算的比例、積分、微分系數。
由式(3)~(5)能夠實現控制量在一定程度上的自適應調整,但是由于參數在線調整算法相對簡單,模糊控制器適應范圍小、對誤差變化敏感度低、控制性能不高。因此,引入RBF神經網絡辨識算法提高參數在線調整能力。
2.3 動態RBF神經網絡辨識器設計
常規的RBF神經網絡雖然能夠以任意精度逼近任意非線性函數,具有強大的非線性映射能力,但須事先確定隱層節點個數,網絡結構固定,適應性差。 基于最近鄰聚類學習算法的RBF神經網絡,無須事先確定隱層節點個數,網絡結構動態改變,完成聚類所得隱層節點個數最少,結構最優[7,8]。
基于RBF神經網絡的模糊控制器工作原理如圖5所示。其中參數α0、αs、α、ku整定公式推導具體如下:

圖5 基于RBF和模糊控制的制導原理圖
動態RBF網絡輸入向量為:
(6)
式中δc為模糊控制器輸出的舵偏指令,動態RBF網絡辨識的輸出向量為:
Y=[α0αsku]T
(7)
離散化系統輸入輸出為:
Xk=[Δx(k-1),Δx(k-2)…Δx(k-m1),
δc(k-1),δc(k-2)…δc(k-n1)]T
(8)
(9)
式中,n1、m1為輸入量延時步數,n為k時刻動態RBF神經網絡隱單元個數。
動態RBF神經網絡辨識器對模糊控制參數進行在線辨識,獲得Jacobian信息計算控制參數并送往模糊控制器,以調節模糊輸入權重系數,Jacobian矩陣為:
(10)
式中ωi,Ci均為輸入量每次在線更新的權值;RBF網絡的性能指標為:
(11)
采用增量公式計算模糊控制參數:
Y(k)=Y(k-1)+Δy
(12)
(13)
已知α0、αs∈[0,1],則需要對輸出α0(k),αs(k)進行歸一化:
(14)
然后利用式(2)計算α(k),并向模糊控制器輸出參數向量[α,ku]。
3 仿真算例
為了對比本文方法與傳統濾波外推導引法在隨機擾動和系統誤差存在的情況下的導引效果,以某型遠程火箭彈彈道末段為導引控制條件,以GPS/地磁陀螺為導航方式,以單通道控制的“十”字氣動鴨舵提供所需修正力,取基于卡爾曼濾波的落點預測導引法為仿真對比導引法。兩種導引法均選擇在彈目縱向距離為6~0.1 km階段,且只考慮縱向平面導引控制。起控點彈道初始條件見表2。為了突出體現導引算法的特性,分析了彈道末段對制導控制系統影響較大的幾類隨機擾動和誤差值,極限大小如表3所示。

表2 起控點彈道初始條件
表3中列出的初始擾動可以通過修改仿真初始彈道條件實現;陣風擾動在仿真開始后施加在彈道模型中;控制誤差和測量誤差服從正態分布,存在于整個末制導過程,通過生成隨機數的形式疊加到仿真模型中。

表3 隨機擾動和誤差量極限值
仿真條件一:在誤差范圍內,改變陣風風速進行仿真,以驗證RBF網絡辨識輸出權重因子α和比例因子Ku的自適應性;仿真條件二:所有干擾和誤差均取極大值,相同條件下與傳統濾波外推落點預測導引律進行仿真對比,以驗證極限條件下新導引法的導引效果。
由圖7、圖8可知,當擾動施加時,預測落點偏差增大,RBF神經網絡辨識器輸出的模糊控制權重因子α和比例因子Ku均取較大值;隨著控制時間的積累,二者逐漸減小并趨于穩定。不同風速的陣風干擾下,RBF網絡辨識器均可通過改變輸出系數大小,有效地實現輸出的自適應調整。
由圖9可知,在擾動和誤差存在下,濾波外推導引法彈道曲率變化較大,落點距目標點縱向偏差為56.23 m;新導引法彈道平直,落點縱向偏差12.13 m。可見,在隨機擾動和測量誤差極限情況下仍可獲得更好的彈道軌跡,較高的導引精度。

圖7 權重因子α自調整曲線
由圖10、圖11可知,存在測量誤差和控制誤差的前提下,擾動施加后濾波外推法計算的舵偏角發生突變,致使彈體所受過載發生長時間振蕩;新導引法舵機控制指令并未發生突變,彈體所受過載很快趨于穩定,變化平穩。而且,擾動施加時新導引法響應更快,通過增大輸出舵偏角迅速減小干擾造成的偏差,使系統盡快趨于穩定;進入穩定后,通過逐漸減小指令舵片角,以進一步減小落點預測偏差。可見,基于RBF神經網絡辨識和模糊控制的導引法提高了導引系統的魯棒性。

圖8 比例因子Ku的自調整曲線

圖10 指令舵偏角對比

圖11 彈體過載對比
4 結論
為了提高傳統濾波外推落點預測導引法自適應性和魯棒性,提出了一種基于模糊控制理論和動態RBF神經網絡在線辨識理論的落點預測導引律。將濾波外推預測得到的落點偏差與偏差變化率作為帶自調整因子模糊控制器輸入量,通過動態RBF神經網絡在線整定模糊控制的權重因子和比例因子,實現制導指令的自適應調整。仿真表明,在隨機擾動和測量誤差極限情況下仍可獲得較高的導引精度,導引指令自適應性、魯棒性更強。
[1] 楊俊,錢宇.基于預測落點導引律的制導炸彈中制導律設計[J].計算機仿真,2011,28(8):87-91.
[2] 薄學綱,韓晶,焦國太等.基于落點預測的火箭彈變系數末制導律[J].探測與控制學報,2015,37(5):84-88.
[3] 李超旺,高敏,宋衛東等.基于攝動原理的火箭彈實時預預測[J].兵工學報,2014,35(8):1164-1171.
[4] HAINZ L C,COSTELLO M.Modified projectile linear theory for rapid trajectory prediction[J].Journal of Guidance,Control,and Dynamics,2005,28(5):1006-1014.
[5] 王曉侃,王蕾,孫忠良等.基于自調整因子模糊控制器的設計與研究[J].機電一體化,2009(12):35-37.
[6] WANG Xiao-kan,SUN Zhong-liang,Design and Research Based on Fuzzy PID-parameters Self-tuning Controller with MATLAB;2008 International Conference on Advanced Computer Theory and Engineering (ECACTE 2008)[C].Phuket Thailand:IEEE CPS,2008:996-999.
[7] 李紹銘,劉寅虎.基于改進型RBF神經網絡辨識的PID控制[J].自動化與儀表,2006(6):40-43.
[8] 劉鐵男,段玉波,劉志德等.帶優選聚類算法的RBF網絡辨識器及應用[J].控制與決策,2003,18(2):233-236
(責任編輯 楊繼森)
Research on Trajectory Prediction Guidance Law Based on Dynamic RBF Network Identification and Fuzzy Control
FENG Yao-xuan1, BO Xue-gang2
(1.College of Mechatronic Engineering,North University of China,Taiyuan 030051,China;2.Jiangsu Yongfeng Mechanical Liability Co., LTD., Nanjing 210014, China)
Aiming at the problem that guidance coefficient is difficult to determine, and guidance precision is low, and poor adaptability and robustness, a target prediction guidance law based on dynamic RBF neural network on-line identification and fuzzy control theory with self adjustment factor was presented. Specifically, on the basis of the extrapolation filter upload target prediction guidance method, we took the impact point deviation and deviation change rate as the fuzzy controller input. Through the RBF neural network, the weights of the fuzzy control and the proportion of the whole set of fuzzy control, we achieved the adaptive adjustment of the guidance commands. The simulation shows that high accuracy of the measurement error can be obtained, and the guidance instruction is more adaptive and robust compared with the conventional method, considering the random disturbance and the measurement error,.
correction projectile; filter extrapolation algorithm; RBF neural network; fuzzy control; target prediction
2016-10-19;
2016-11-15
馮耀暄(1995—),男,碩士研究生,主要從事制導與控制技術研究。
10.11809/scbgxb2017.02.025
馮耀暄,薄學綱.基于動態RBF網絡辨識和模糊控制的彈道落點預測導引研究[J].兵器裝備工程學報,2017(2):108-112.
format:FENG Yao-xuan, BO Xue-gang.Research on Trajectory Prediction Guidance Law Based on Dynamic RBF Network Identification and Fuzzy Control[J].Journal of Ordnance Equipment Engineering,2017(2):108-112.
TP273
A
2096-2304(2017)02-0108-05
