船用軸功率系統測量結果不確定度評定
2017-03-17 02:54:42尹緒光
環球市場 2017年3期
馬 鵬 尹緒光
江南造船(集團)有限責任公司
船用軸功率系統測量結果不確定度評定
馬 鵬 尹緒光
江南造船(集團)有限責任公司
測量不確定度,是用以表征合理地賦予被測量值的分散性,與測量結果相聯系的參數。測量不確定度體現了測量結果的質量,測量不確定度越小,測量結果的使用價值越高,質量越好;測量不確定度越大,測量結果的使用價值也就越低,相應的質量也就越差。
軸功率;應變技術;不確定度
1 軸功率測量原理
軸功率一般是以通過測量軸的扭矩和轉速再通過計算獲得的。功率、轉速和扭矩之間的計算公式如下:
P-柴油機的輸出功率,kW;
T-柴油機的輸出扭矩,Nm;
ω-軸角速度,rad/s;ω=2л n/60(rad/s);
л=3.1416(圓周率); n-柴油機轉速,r/min。
由此可知,只需測量軸系的扭矩和對應的轉速,即可計算得到該軸系的軸功率。
1.1 應變式扭矩原理
應變技術是一門發展較為成熟的技術,而電阻應變片則是最常用傳感元件,其廣泛應用于位移、加速度、力、力矩等參數的測量,它具有簡單輕便、精度高,測量范圍廣,性能穩定可靠,頻響好,既可測靜態,也可測快速交變應力等特點。金屬電阻應變片的工作原理是當扭矩作用于被測軸時,軸發生扭轉變形,在與軸線成正負45°夾角方向上產生最大的剪應變,在此方向上粘貼的電阻應變片,敏感構件受力產生表面應變,致使電阻應變片的相對電阻發生變化,通過惠斯頓電橋,準確而又敏捷地轉換成電壓(或電流)信號,實現非電量電測。這通常被稱為電阻應變效應。
若電阻絲的電阻R為

式中
R—電阻值 ρ —電阻率 L—電阻絲長 A—電阻絲橫截面積
任一參數變化均會引起電阻變化,求導數:

(2-1)代入(2-2),得到

另εy=-μεx
εx—電阻絲軸向相對變形,或稱縱向應變。
εy—電阻絲徑向相對變形,或稱橫向應變。
(2-2)代入(2-3)得

μ —材料的泊松系數
(1+2μ)εx—電阻絲幾何尺寸變化引起的電阻值變化
dρ/ρ —電阻絲電阻率變化引起的電阻值變化對于金屬材料,電阻率幾乎不變,所以

電阻應變片將應變轉換為電阻的變化量測量電路將電阻的變化再轉換為電壓或電流信號,最終實現被測量的測量。如圖1所示電橋原理圖所示,對于直流電橋,輸出:

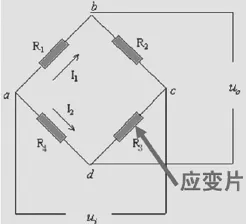
圖1 電橋原理圖
假設電橋初始狀態是平衡的,即:R1=R2=R3=R4=R,R1R3=R2R4,則U0=0。如果各應變的電阻值發生微小變化ΔR1, ΔR2, ΔR3, ΔR4,則電橋輸出端的電壓發生變化。由于ΔR□R,推得全橋電路測量電壓輸出為:

實際測量中,首先要將電阻式應變片被粘貼于被測系統的軸系上,并用電烙鐵將引線焊接到接線端子上,然后進行防潮處理,將電源與信號發射裝置固定于應變片側。測量時,被測軸系從最低轉速分檔增加至額定轉速,應變片與發射裝置隨軸系轉動,實時將扭矩信號發射至接收裝置,接收裝置放大信號,將扭矩信號轉換為0~10V電壓信號,根據不同軸系的直徑可由式(2-8)計算輸出電壓對應的扭矩。由數采設備采集其交流電壓信號,即由扭振引起的交變扭矩信號,數采器同時采集當前的轉速信號,通過計算就可以得到功率值。

式中:Di為軸系內徑;Do為軸系外徑;E為抗拉強度;GF為應變片靈敏度系數;GXMT為增益;N為橋臂數量;TFS為實測扭矩;VEXC為電橋激勵電壓;VFS為TT10K輸出電壓;μ為泊松系數。
1.2 轉速測量原理
轉速測量系統,采用漫反射型光電式傳感器,該傳感器的靈敏度可調,同時該型傳感器還有可見式指示燈顯示轉速信號是否觸發及觸發信號的強弱。在轉速的數據采集部分,為了采集較低的轉速,采用了脈沖信號的周期測量法進行轉速信號的采集以保證測量準確度,測量方法如圖所示。周期測量法是將被測量信號經過整形后轉換成方波信號,利用單片機查詢兩個上升沿,在此期間根據晶體振蕩器產生的周期為Tc的脈沖送計數器進行計數,設計數值為N,則得被測量信號的周期值Tx=Tc×N,然后取其倒數再乘以60即為被測量信號的轉速值。
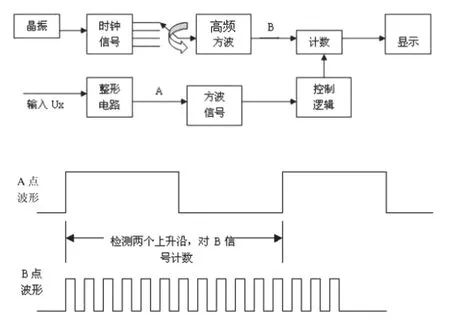
圖2 轉速測量系統圖
2.軸功率測量系統不確定度的評定
1、輸出量
選取某船舶作為測量樣本,將應變片按照貼片工藝粘貼于中間軸上,轉速傳感器穩定安裝于支架上并在軸上貼好反光紙,將各設備之間的連線接好并保證各部分連接正常,數據傳輸可靠,得到中間軸的軸功率。
2、數學模型
P=T×n×0.1047
P-柴油機的輸出功率,kW;
T-柴油機的輸出扭矩,Nm;
n-柴油機轉速,r/min。
其中各分量的靈敏系數為
3、不確定度分量的來源
根據《JJF1059-1999 測量不確定度的評定與表示》,結合扭矩和轉速測量的實際情況,其測量不確定度主要由應變片應變系數和應變儀TT10K和轉速以及無紙記錄儀EN880C引入。
3.1 由測量重復性引入的不確定度分量
3.2 由應變片應變系數引入的標準不確定度分量
3.3 由溫度引入的標準不確定度分量
3.4 由TT10K引入的標準不確定度分量
3.5 由轉速引入的標準不確定度分量
3.6 由無紙記錄儀EN880C引入的標準不確定度分量
4、測量不確定度分量評定
4.1、由測量重復性引入的不確定度分量
A類評定,在主機90%負荷工況下,進行測量,連續重復測量6次。

n 1 2 3 4 5 6 kW 6408 6482 6436 6426 6473 6496 x 6453.5
4.2 由應變片應變系數引入的標準不確定度分量uT1
B類評定,根據應變片技術指標,應變系數的允許誤差為 1.0%,半寬度為1.0%,設為均勻分布,包含因子 ,則標準不確定度分量為:

4.3 由溫度引入的標準不確定度分量
B類評定,由于中航工業電測儀器股份有限公司制造的電阻應變片是由卡瑪銅制成的,實現蠕變自補償和溫度(或彈性模量)自補償,其材料的電阻溫度系數僅為±20×10-6/℃。其他儀器的工作溫度均在其允許的溫度范圍之內,因此,可以忽略環境溫度對標準不確定度分量的影響。
4.4 由TT10K引入的標準不確定度分量
B類評定根據TT10K技術指標,允許誤差為 0.16%,半寬度為0.16%,設為均勻布,包含因子 ,則標準不確定度分量為:

4.5 由轉速引入的標準不確定度分量
B類評定,根據轉速傳感器的技術指標,允許誤差為 0.8%,半寬度為0.8%,設為均勻布,包含因子 ,則標準不確定度分量為:

4.6 由無紙記錄儀EN880C引入的標準不確定度分量
B類評定,根據無紙記錄儀EN880C技術指標,允許誤差為0.15%,設為均勻分布,包含因子 ,則標準不確定度分量為:

5、合成標準不確定度uc
由于各輸入量之間不相關,軸功率測量引入的不確定度

6、擴展不確定度
取k=2,擴展不確定度Urel=1.6%
[1] 國家質量技術監督局.JJF1059-1999 測量不確定度評定與表示,1999.
[2] 商維綠.現代扭矩測量技術[M].上海交通大學出版社,1999.10.
[3] TT9000 Digital Telemetry System [M]. Binsfeld Engineering.
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21