基于圖像處理的車輛類型識(shí)別的研究
2017-03-23 20:29:17朱金榮張廣杰夏長(zhǎng)權(quán)
現(xiàn)代電子技術(shù) 2017年4期
朱金榮+張廣杰+夏長(zhǎng)權(quán)

摘 要: 為了完善車型檢測(cè)識(shí)別的算法,首先利用傅里葉描述子的方法建立車輛圖形庫(kù),對(duì)攝像頭采集到的車輛側(cè)面圖像進(jìn)行形態(tài)學(xué)操作,得到車輛輪廓封閉曲線并與圖形庫(kù)模板匹配,確定車型;然后利用基于積分的方法處理車輛頂面圖像,計(jì)算出相應(yīng)特征參數(shù),確定車輛大小信息,解決車型檢測(cè)的多檢、錯(cuò)檢現(xiàn)象。該文對(duì)圖像處理算法做了具體推導(dǎo)并給出了實(shí)現(xiàn)流程,通過(guò)仿真實(shí)驗(yàn)表明,該文的算法能夠充分地提取車輛的形狀與幾何尺寸信息,車型識(shí)別正確率很高,且計(jì)算量小。
關(guān)鍵詞: 智能交通; 車型檢測(cè); 傅里葉描述子; AOI區(qū)域劃分
中圖分類號(hào): TN911.73?34 文獻(xiàn)標(biāo)識(shí)碼: A 文章編號(hào): 1004?373X(2017)04?0016?03
Research on vehicle type recognition based on image processing
ZHU Jinrong, ZHANG Guangjie, XIA Changquan
(College of Physical Science and Technology, Yangzhou University, Yangzhou 225002, China)
Abstract: In order to optimize the algorithm of vehicle type detection, the graphic base of vehicles was established with the method of Fourier descriptor. The vehicle side images acquired by camera are treated by means of morphological operation to get the closed curves of vehicle contour and match them with the templates in the graphic base to determine the vehicle type. The vehicle top images are processed with the integral method to calculate the corresponding characteristic parameters to ensure the size information of a vehicle, so as to eliminate the phenomenon of the wrong detection. The image processing algorithm is derived and its implementation flow process is given in this paper. The simulation experiment result shows that the algorithm is able to adequately extract the information of vehicle shape and size, the recognition accuracy is high, and the calculated amount small.
Keywords: intelligent traffic; vehicle type detection; Fourier descriptor; AOI region partition
0 引 言
車型識(shí)別技術(shù)是智能交通很重要的方面,車型識(shí)別技術(shù)[1]用于解決以下幾方面問(wèn)題:ETC收費(fèi)系統(tǒng)[2]通過(guò)車載收發(fā)機(jī)自動(dòng)收費(fèi),全國(guó)各地區(qū)車輛分類標(biāo)準(zhǔn)及收費(fèi)額度不統(tǒng)一,車載標(biāo)簽容易被人更換,造成通行費(fèi)的損失;車輛犯罪的問(wèn)題主要表現(xiàn)為肇事逃逸和盜搶車輛,罪犯更換車輛牌照和改變車輛顏色等手段使得現(xiàn)有的車型識(shí)別技術(shù)不易鑒別;交通管理部門(mén)制定運(yùn)營(yíng)方案和選擇工程技術(shù),需要對(duì)各路段進(jìn)行交通量調(diào)查,系統(tǒng)地收集整理資料和數(shù)據(jù),為城鄉(xiāng)交通進(jìn)行布局和規(guī)劃。
以上各方面使得車型識(shí)別技術(shù)成為不可或缺的方法,現(xiàn)代化的設(shè)施也為車型識(shí)別提供了條件。ETC專用車道攝像頭有安置在道路兩側(cè)和龍門(mén)架上[2]的:安置與道路兩側(cè)的攝像頭視角垂直于車輛行進(jìn)方向,與路面夾角很小,采集到車輛側(cè)面圖像;龍門(mén)架上的攝像頭高度很高,拍攝視角與路面夾角接近90°。大部分公路監(jiān)控?cái)z像頭都是這樣的視角,因此對(duì)ETC車道的車輛檢測(cè)算法具有普適性。本文對(duì)ETC車道車輛側(cè)面圖像采用了基于傅里葉描述子[3?4]的檢測(cè)算法,通過(guò)形狀信息建立車輛圖形庫(kù),用于檢測(cè)車型,對(duì)車頂面圖像采用了基于積分思想的方法,計(jì)算出車輛的大小特征參數(shù),兩種方法相結(jié)合判定車型。
1 車輛圖像庫(kù)
車輛類型檢測(cè)的過(guò)程是通過(guò)CCD攝像頭采集到視頻幀數(shù)據(jù),經(jīng)圖像采集卡傳遞到視頻處理器[5]進(jìn)行運(yùn)算的過(guò)程,視頻處理器中拷入的不僅有算法,還需要大量的車輛檢測(cè)樣本作為數(shù)據(jù)庫(kù),稱為圖像庫(kù)。本節(jié)具體給出通過(guò)傅里葉描述子構(gòu)建圖像庫(kù)的操作過(guò)程。
1.1 傅里葉描述子歸一化
對(duì)車輛圖像經(jīng)過(guò)處理后能得到車輛對(duì)外邊界,顯示了車輛的形狀,呈一條封閉曲線。對(duì)一條封閉曲線按相等間隔取N個(gè)采樣點(diǎn),在xy平面上從任意點(diǎn)開(kāi)始,沿逆時(shí)針?lè)较虻玫絅個(gè)邊界點(diǎn),,用復(fù)變量表示為,該坐標(biāo)序列是周期函數(shù),以曲線的周長(zhǎng)為周期。在一個(gè)周期內(nèi)對(duì)坐標(biāo)序列進(jìn)行快速離散傅里葉變換(FFT)[3]:
復(fù)系數(shù)即邊界的傅里葉描述子,該數(shù)組描述了邊界的變化。當(dāng)該曲線旋轉(zhuǎn)角、平移和放大倍,F(xiàn)FT變換邊界起始點(diǎn)沿著封閉曲線移動(dòng)了個(gè)采樣點(diǎn)后,復(fù)系數(shù)為:
(1)
式中,,車輛的運(yùn)動(dòng)和攝像頭的視場(chǎng)會(huì)造成上述曲線的平移、放大和FFT起始點(diǎn)的變化,因此需要提取曲線不隨上述因素的參數(shù)。觀察發(fā)現(xiàn),當(dāng)曲線平移時(shí),只有分量的值發(fā)生改變。為低頻系數(shù),對(duì)應(yīng)于。因此把每一個(gè)復(fù)系數(shù)的幅值除以,得到歸一化傅里葉描述子:
(2)
歸一化后的傅里葉描述子可以計(jì)算任意2個(gè)車輛i和j間的相似程度,定義為離散度:
當(dāng)趨近于0時(shí),表示兩輛車形狀基本一致;越大,說(shuō)明車輛形狀的差異越大。
1.2 檢測(cè)模板選取
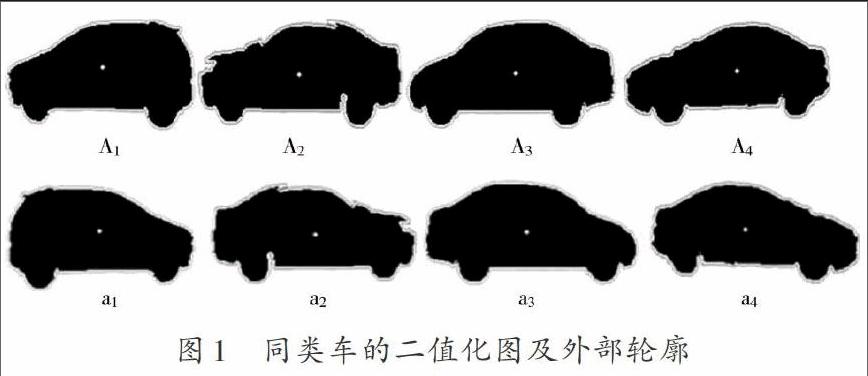
將視頻幀RGB圖像進(jìn)行去背景、灰度化、車輛目標(biāo)提取[4],然后進(jìn)行二值化處理、邊界提取得到車輛輪廓的閉合曲線,用于傅里葉描述子的檢測(cè)。進(jìn)行車輛檢測(cè)需要一定數(shù)量的圖像庫(kù),對(duì)同類車需要選取可靠的檢測(cè)模板,構(gòu)建圖像庫(kù)。圖1為不同形狀的小型家用汽車經(jīng)過(guò)處理后的圖片,得到了車輛圖像的邊界和中心點(diǎn)。上下列分別表示向車輛左右行駛,使用歸一化傅里葉描述子計(jì)算不同形狀汽車的相似度差異。
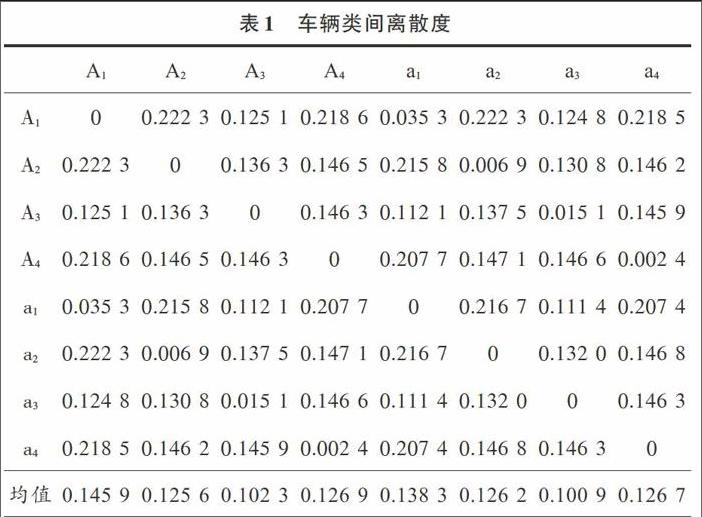
如表1所示,總共8個(gè)樣本,A1與a1,A2與a2,A3與a3,A4與a4呈鏡像對(duì)稱,離散度值都小于0.05,說(shuō)明了行駛方向不對(duì)車輛檢測(cè)產(chǎn)生影響。A1,A2,A4汽車及向右行駛的a1,a2,a4汽車與其他7個(gè)樣本的離散度有的達(dá)到0.2,相對(duì)較大,因此不具備檢測(cè)車型的條件,不能構(gòu)建圖像庫(kù)。A3和a3樣本的平均離散度最小,且與其他樣本的離散度值都小于0.15,因此可以作為圖像庫(kù)檢測(cè)模板。其他車型也通過(guò)此種方法確定檢測(cè)模板。
表1 車輛類間離散度
1.3 基準(zhǔn)特征向量
車型特征向量是識(shí)別車輛類型的基準(zhǔn)系數(shù),車型檢測(cè)通過(guò)計(jì)算待識(shí)別車輛圖像的歸一化傅里葉描述子與車型特征向量的距離來(lái)完成。本文總結(jié)了幾種車型的基準(zhǔn)特征向量,經(jīng)過(guò)大量的統(tǒng)計(jì)分析,可以對(duì)各類車型計(jì)算出具有普適性的傅里葉描述子作為基準(zhǔn)特征向量[5],用于車輛檢測(cè)。表2為各種車型的歸一化傅里葉描述子(為了避免漏檢,需要增加樣本數(shù)量,實(shí)際的圖像庫(kù)中沒(méi)類車型都有很多組基準(zhǔn)特征向量)。進(jìn)行車輛檢測(cè)時(shí),計(jì)算機(jī)經(jīng)過(guò)圖像處理操作得到被檢車輛的傅里葉描述子,然后計(jì)算出與各基準(zhǔn)特征向量的值,值小于設(shè)定閾值T的所對(duì)應(yīng)車型即為所檢測(cè)出車型。
2 車輛特征參數(shù)
現(xiàn)實(shí)中有很多大小、功能類型不同的車輛形狀卻很相似,第1.3節(jié)中通過(guò)被檢車輛與圖像庫(kù)的離散度判斷車輛類型的方法會(huì)出現(xiàn)幾種車型無(wú)法區(qū)分的情況,因此需要確定車輛的大小。通過(guò)安置于道路兩側(cè)的攝像頭采集的圖像不能夠準(zhǔn)確得到車輛的大小信息。但是安裝于高處的攝像頭能夠更大視角地采集路面圖像如圖2所示,計(jì)算車輛大小參數(shù)。利用基于積分的數(shù)學(xué)方法可以提取車輛大小特征參數(shù)[6]。車輛在車道上會(huì)覆蓋相應(yīng)的區(qū)域,稱為AOI區(qū)域,即感興趣區(qū)域。本文通過(guò)AOI(Area of Interesting)區(qū)域?qū)⒈粰z測(cè)車道劃分成多個(gè)子區(qū)域來(lái)實(shí)現(xiàn)攝像機(jī)像平面的標(biāo)定和車輛大小的計(jì)算。
本文算法設(shè)置的每個(gè)AOI區(qū)域與實(shí)際道路長(zhǎng)度相等,順著車道方向延伸。拍攝到的圖像是實(shí)物在攝像機(jī)像平面上的投影,如圖3所示,攝像機(jī)安裝位置及拍攝角度確定后,可以測(cè)出攝像機(jī)視角,光軸與豎直方向的夾角和攝像頭焦點(diǎn)C與地面的距離H。
AOI區(qū)域劃分為n個(gè)實(shí)際長(zhǎng)度相同的子區(qū)域:
,,,,,為AOI區(qū)域在像平面上的分界點(diǎn),與光軸相垂直。圖3中點(diǎn)為焦點(diǎn)在車道面上的投影,為與之間的夾角,與之間的夾角為。經(jīng)過(guò)幾何推導(dǎo)得到:
設(shè)對(duì)應(yīng)于像平面中的與之比為,與之比為,證得:
因此,圖像中的感興趣區(qū)域長(zhǎng)度與圖像中的總長(zhǎng)度的對(duì)應(yīng)關(guān)系為。通過(guò)計(jì)算得到車頭至車尾的區(qū)域,從而計(jì)算出車長(zhǎng)。結(jié)合第1節(jié)中的方法求得車輛高度,得到車輛特征參數(shù)。此算法計(jì)算出車輛的大小特征,進(jìn)一步縮小了車型判斷的范圍,使得由1.3節(jié)中的基準(zhǔn)特征向量檢測(cè)車型不易出現(xiàn)誤判。
3 結(jié) 論
本文對(duì)表2中各類機(jī)動(dòng)車各選取了100多個(gè)樣本進(jìn)行仿真計(jì)算,實(shí)驗(yàn)結(jié)果表明,通過(guò)圖形庫(kù)實(shí)現(xiàn)的車型檢測(cè)可以檢測(cè)出車輛類型,但有24.7%的情況檢測(cè)出多種車型;車輛特征參數(shù)的計(jì)算對(duì)車輛大小進(jìn)行限制,再次計(jì)算全部都判斷出車型。由于人為原因,有2%左右出現(xiàn)了誤判。在計(jì)算量上,基于傅里葉描述子的算法只對(duì)車輛外輪廓使用了100個(gè)邊界采樣點(diǎn),取了10個(gè)低頻分量的傅里葉描述子計(jì)算待檢測(cè)目標(biāo)與圖像庫(kù)模板的歐氏距離,減少了特征參數(shù)的維數(shù),計(jì)算量小。第2節(jié)的方法只需要計(jì)算車輛的長(zhǎng)度,且通過(guò)數(shù)學(xué)推導(dǎo)得到了很簡(jiǎn)化的車長(zhǎng)計(jì)算公式,計(jì)算量也很小,因此適用于交通流速很快的城市道路,具有普適性與魯棒性。本文的車型檢測(cè)算法旨在完善當(dāng)前車輛視頻檢測(cè)的不足。第2節(jié)中車輛大小特征參數(shù)的算法能將車輛長(zhǎng)寬高的計(jì)算誤差控制在6%以內(nèi),但只能確定車輛大小規(guī)模,不能夠確定車輛具體車型、功能,其目的是為了減少第1節(jié)不同大小卻形狀相似的車輛之間的誤判。基于傅里葉描述子檢測(cè)車輛類型的算法,最大程度地提取了車輛的形狀信息,且建立了圖像庫(kù),可用于各種交通檢測(cè)系統(tǒng),更有利于現(xiàn)代智能交通的完善。
參考文獻(xiàn)
[1] XU Zewei, CHEN Xianqiao.Vehicle recognition and classification method based on laser scanning point cloud data [C] //International Conference on Transportation Information and Safety(ICTIS). [S.l.]: IEEEXplore, 2015:44?49.
[2] HSU G H, LIN L R, JAN R H, et al. Design of ETC violation enforcement system for non?payment vehicle searching [C]// Proceedings of International Conference on Advanced Communication Technology. [S.l.]: ICACT, 2013: 169?178.
[3] 趙濤,鄧偉.結(jié)合PCA和FPD的傅里葉形狀描述子[J].計(jì)算機(jī)工程,2011,37(21):149?151.
[4] ZHAO Lele, WANG Bing, SHU Huazhong. Multi?scale Fourier descriptor with phase information for image retieval [C]// 1st International Conference on Energy Systems and Electrical Power. [S.l.: s.n.], 2011: 5068?5075.
[5] MITHUN Niluthpol Chowdhury. Detection and classification of vehicle from video using multiple time?spatial images [J]. IEEE transactions on intelligent transportation systems, 2012, 13: 1215?1225.
[6] 黃震宇.成雅高速公路收費(fèi)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D].成都:電子科技大學(xué),2013.
[7] 張茜婷,閆國(guó)偉.基于三維逆投影圖的車速檢測(cè)[J].現(xiàn)代電子技術(shù),2015,38(16):70?72.
