三維掃描測(cè)振技術(shù)在液體火箭發(fā)動(dòng)機(jī)模態(tài)試驗(yàn)中的應(yīng)用
2017-03-27 02:55:15李斌潮
宇航學(xué)報(bào) 2017年1期
閆 松,李 斌,李斌潮,李 鋒
(西安航天動(dòng)力研究所液體火箭發(fā)動(dòng)機(jī)技術(shù)重點(diǎn)實(shí)驗(yàn)室,西安710100)
三維掃描測(cè)振技術(shù)在液體火箭發(fā)動(dòng)機(jī)模態(tài)試驗(yàn)中的應(yīng)用
閆 松,李 斌,李斌潮,李 鋒
(西安航天動(dòng)力研究所液體火箭發(fā)動(dòng)機(jī)技術(shù)重點(diǎn)實(shí)驗(yàn)室,西安710100)
針對(duì)傳統(tǒng)的黏貼振動(dòng)傳感器的模態(tài)試驗(yàn)方法存在附加傳感器質(zhì)量影響及振型空間分辨率不高等問題,研究了利用激光測(cè)振系統(tǒng)和機(jī)器人平臺(tái)對(duì)復(fù)雜結(jié)構(gòu)進(jìn)行三維掃描振動(dòng)測(cè)試的方法。并以液體火箭發(fā)動(dòng)機(jī)(LRE)推力室和氧化劑入口管為例,通過三維掃描測(cè)振技術(shù)對(duì)二者進(jìn)行模態(tài)測(cè)試,獲取了空間分辨率極高的模態(tài)振型,定量分析了傳感器附加質(zhì)量對(duì)管路模態(tài)測(cè)試的影響,研究結(jié)果表明三維掃描測(cè)量方法具有精度高、測(cè)試速度快、測(cè)點(diǎn)數(shù)量不受限制等優(yōu)勢(shì)。
三維掃描;激光測(cè)振;液體火箭發(fā)動(dòng)機(jī);機(jī)器人
0 引 言
液體火箭發(fā)動(dòng)機(jī)特別是中國(guó)新一代高壓補(bǔ)燃液氧煤油發(fā)動(dòng)機(jī)采用補(bǔ)燃循環(huán)提高性能,結(jié)構(gòu)中存在大量細(xì)管路,且空間走向錯(cuò)綜復(fù)雜,如果其與激勵(lì)之間發(fā)生耦合共振,則會(huì)在很短時(shí)間內(nèi)產(chǎn)生疲勞斷裂。因此掌握管路的結(jié)構(gòu)動(dòng)力學(xué)特性,避開發(fā)動(dòng)機(jī)試車時(shí)的主導(dǎo)頻率,對(duì)于其結(jié)構(gòu)完整性有重要意義[1]。試驗(yàn)?zāi)B(tài)分析是了解結(jié)構(gòu)動(dòng)態(tài)特性的重要手段,一方面可以改進(jìn)結(jié)構(gòu)設(shè)計(jì),避開共振頻率;另一方面可以為有限元模型修正提供準(zhǔn)確的試驗(yàn)結(jié)果[2-3]。傳統(tǒng)的模態(tài)試驗(yàn)方案利用力錘或激振器作為激勵(lì)源,采用蜂蠟或者螺栓連接等手段將加速度傳感器固定于被測(cè)物體表面,測(cè)量各響應(yīng)測(cè)點(diǎn)相對(duì)于激勵(lì)點(diǎn)的頻響函數(shù),從而得到被測(cè)物體的模態(tài)參數(shù)[4-5]。這種方法在實(shí)際工程應(yīng)用中存在以下不足:1)試驗(yàn)測(cè)點(diǎn)數(shù)量受傳感器及測(cè)量通道數(shù)限制,測(cè)點(diǎn)數(shù)量較少,合理布置測(cè)點(diǎn)位置存在較大困難,雖然發(fā)展了大量算法用于優(yōu)化布置傳感器,如模態(tài)動(dòng)能法,有效獨(dú)立法等[6-8],但這些算法大多建立在有限元模型準(zhǔn)確的基礎(chǔ)上,限制了其在工程復(fù)雜結(jié)構(gòu)上的應(yīng)用;2)對(duì)于輕薄結(jié)構(gòu)或剛度較弱結(jié)構(gòu)存在傳感器附加質(zhì)量和剛度的影響;3)每一個(gè)3向傳感器都需要空間和軸向定位,如果測(cè)試結(jié)果用于后續(xù)的相關(guān)性等分析,傳感器的定位需要很精確,對(duì)于管路等弧面結(jié)構(gòu),實(shí)際操作中往往難以實(shí)現(xiàn)。
激光測(cè)振技術(shù)是近年來發(fā)展起來的一種非接觸式振動(dòng)測(cè)試方法,它利用激光多普勒效應(yīng),當(dāng)被測(cè)結(jié)構(gòu)發(fā)生移動(dòng),接收到的光波頻率會(huì)發(fā)生變化,通過測(cè)量光波改變的頻率得到被測(cè)結(jié)構(gòu)的移動(dòng)速度。Gade等[9]指出激光測(cè)振技術(shù)對(duì)于輕質(zhì)、微小,高溫結(jié)構(gòu)的振動(dòng)測(cè)量有獨(dú)特優(yōu)勢(shì),且由于激光束可以在很短的時(shí)間內(nèi)掃描許多點(diǎn),因此相對(duì)于傳統(tǒng)方法測(cè)試時(shí)間更短。Doupe等[10-11]在對(duì)FalconSAT-5衛(wèi)星的有限元模型修正時(shí),采用激光測(cè)振手段獲取了面板等平整結(jié)構(gòu)的模態(tài)參數(shù),測(cè)量了FalconSAT-5衛(wèi)星超過2000個(gè)測(cè)點(diǎn)的脈沖響應(yīng),并研究了修正模型所用測(cè)點(diǎn)數(shù)目不同對(duì)修正結(jié)果的影響。但想要獲得三維結(jié)構(gòu)的模態(tài)振型,需要360度移動(dòng)激光掃描頭,實(shí)際應(yīng)用中存在困難。李暉等[12]通過組建激光旋轉(zhuǎn)掃描模態(tài)測(cè)試系統(tǒng),實(shí)現(xiàn)了對(duì)圓柱殼的三維振型的測(cè)量。
為了精確獲得復(fù)雜結(jié)構(gòu)的模態(tài)參數(shù),我所引進(jìn)了聯(lián)合激光測(cè)振系統(tǒng)及機(jī)器人平臺(tái)的試驗(yàn)設(shè)備,它將3個(gè)激光掃描頭安裝固定于一個(gè)6自由度的機(jī)器人手臂上,通過機(jī)器人機(jī)械手臂的移動(dòng)實(shí)現(xiàn)對(duì)復(fù)雜結(jié)構(gòu)的全方位三維掃描測(cè)量。Polytec公司的Oliver等[13]曾闡述了該設(shè)備工作原理,本文側(cè)重于三維掃描測(cè)振技術(shù)在液體火箭發(fā)動(dòng)機(jī)模態(tài)試驗(yàn)中的應(yīng)用研究。通過對(duì)液體火箭發(fā)動(dòng)機(jī)推力室和氧化劑入口導(dǎo)管的模態(tài)測(cè)試,比較其與傳統(tǒng)測(cè)試方法的優(yōu)缺點(diǎn)。
1 試驗(yàn)原理及方法
圖1為測(cè)量系統(tǒng)原理示意圖,測(cè)量時(shí),3個(gè)激光掃描頭聚焦到同一點(diǎn),通過不同方向的3個(gè)激光掃描頭測(cè)量同一點(diǎn)的振動(dòng)速度,可以得到該點(diǎn)的在空間任意XYZ3個(gè)方向的振動(dòng)速度。激光掃描頭測(cè)量得到的光學(xué)響應(yīng)信號(hào)由其內(nèi)部光學(xué)器件接收后,傳輸?shù)郊す鈹?shù)據(jù)采集及控制設(shè)備轉(zhuǎn)換為電信號(hào),通過計(jì)算機(jī)記錄振動(dòng)數(shù)據(jù)。激光掃描頭安裝于機(jī)器人機(jī)械臂上,通過機(jī)械臂的移動(dòng)實(shí)現(xiàn)對(duì)被測(cè)物體表面的全場(chǎng)掃描。機(jī)器人運(yùn)動(dòng)路徑由試驗(yàn)人員在機(jī)器人編程面板預(yù)先定義,機(jī)器人按照定義好的路徑對(duì)掃描網(wǎng)格測(cè)點(diǎn)逐個(gè)進(jìn)行測(cè)量,激光掃描頭的位置信息由機(jī)器人控制柜傳遞給主機(jī)。采用激振器對(duì)被測(cè)物體施加激勵(lì),一般采用Burst chirp或Burst random激勵(lì)信號(hào),對(duì)每個(gè)測(cè)點(diǎn)采用多次平均測(cè)量,PSV測(cè)試軟件對(duì)響應(yīng)信號(hào)和激勵(lì)信號(hào)進(jìn)行數(shù)據(jù)采集。
試驗(yàn)步驟如下:
1)試驗(yàn)準(zhǔn)備階段。按試驗(yàn)所需狀態(tài)固定被測(cè)件,連接激振器及力傳感器。通過機(jī)器人編程面板操縱移動(dòng)激光掃描頭到空間某一合適位置M1,記錄此時(shí)機(jī)器人位置坐標(biāo),在被測(cè)物體表面定義掃描點(diǎn),掃描出被測(cè)物體該區(qū)域外形輪廓;依次挪動(dòng)激光掃描頭到其他位置M2,M3,…,記錄機(jī)器人位置坐標(biāo),同樣定義這些位置的掃描點(diǎn),直到整個(gè)被測(cè)物體表面測(cè)點(diǎn)定義完畢。
2)自動(dòng)測(cè)試階段。如圖2,程序自動(dòng)運(yùn)行,機(jī)器人按定義好的路徑運(yùn)行到預(yù)定空間坐標(biāo)M1,在該位置激光掃描頭對(duì)該區(qū)域定義的網(wǎng)格點(diǎn)逐個(gè)進(jìn)行測(cè)量,激振器每激勵(lì)一次,激光對(duì)一個(gè)測(cè)點(diǎn)響應(yīng)信號(hào)進(jìn)行一次測(cè)量。該區(qū)域所有測(cè)量點(diǎn)掃描完畢后,機(jī)器人運(yùn)行到下一預(yù)定空間坐標(biāo)M2,繼續(xù)掃描測(cè)量該區(qū)域所對(duì)應(yīng)的網(wǎng)格點(diǎn),重復(fù)以上步驟直到所有測(cè)點(diǎn)測(cè)量完成。
3)數(shù)據(jù)后處理階段。對(duì)得到的頻響函數(shù)進(jìn)行分析,觀察振動(dòng)變形等,將數(shù)據(jù)導(dǎo)出到外部軟件進(jìn)行模態(tài)分析。
由試驗(yàn)過程可知,對(duì)于不同批次相同產(chǎn)品的模態(tài)測(cè)試變得極為方便,因?yàn)橹恍瓒x一次機(jī)器人移動(dòng)路徑及掃描點(diǎn),整個(gè)測(cè)試過程高度自動(dòng)化。
2 液體火箭發(fā)動(dòng)機(jī)推力室模態(tài)測(cè)試
圖3為液體火箭發(fā)動(dòng)機(jī)推力室有限元模型,圖4為通過激光掃描得到的外輪廓特征,即試驗(yàn)測(cè)點(diǎn)模型,對(duì)于噴管集液環(huán)以下部位未掃描(集液環(huán)位置見圖3)。整個(gè)試驗(yàn)?zāi)P凸舶?573個(gè)測(cè)點(diǎn),由不同的顏色組成,顏色的不同代表了自動(dòng)測(cè)試階段機(jī)器人是在不同位置完成了對(duì)整個(gè)模型的三維掃描測(cè)量。由于激振器和泵架桿等障礙物遮擋,推力室表面某些區(qū)域激光不能到達(dá),因此模型中有部分“窟窿”。
圖5為傳統(tǒng)的黏貼傳感器試驗(yàn)?zāi)P停軠y(cè)量通道數(shù)及工作量限制,共布置176個(gè)測(cè)點(diǎn),由此可見,三維掃描測(cè)振技術(shù)較以往的黏貼傳感器的試驗(yàn)測(cè)試手段極大的豐富了數(shù)據(jù)信息。
圖6所示為機(jī)器人在某一位置時(shí),激光掃描頭對(duì)該區(qū)域的測(cè)量點(diǎn)進(jìn)行逐個(gè)掃描測(cè)量的過程,綠色的點(diǎn)表示已掃描測(cè)量點(diǎn),藍(lán)色點(diǎn)表示待掃描點(diǎn)。圖7和圖8比較了三維掃描試驗(yàn)結(jié)果與傳統(tǒng)試驗(yàn)結(jié)果,圖7(a)、7(b)分別為649.8 Hz下推力室的振動(dòng)變形及模態(tài)振型,從圖中可以看出三維掃描所得振型各測(cè)點(diǎn)振動(dòng)模式一致,振型分辨率高,而傳統(tǒng)試驗(yàn)方法所得該階固有頻率為650.2 Hz,與激光測(cè)振結(jié)果僅相差0.4 Hz,但振型分辨率低,各測(cè)點(diǎn)一致性較差。圖8(a)、8(b)分別為737.2 Hz下兩種方法得到的噴管擴(kuò)張段5節(jié)徑呼吸振型,三維掃描所得振型清晰,而傳統(tǒng)的試驗(yàn)?zāi)P陀捎跍y(cè)點(diǎn)數(shù)量所限,對(duì)高階振型分辨力較差,精確的測(cè)量結(jié)果使得激光測(cè)試手段用于相關(guān)性分析和故障檢測(cè)時(shí)具有顯著優(yōu)勢(shì)[14]。
由于試驗(yàn)?zāi)B(tài)和有限元模態(tài)的自由度是不一致的,因此需要對(duì)有限元模型進(jìn)行縮聚,以進(jìn)行相關(guān)性分析。三維掃描測(cè)振所得每個(gè)測(cè)點(diǎn)的空間定位很精確,這對(duì)于后續(xù)相關(guān)性分析非常方便,圖9為同一坐標(biāo)系下的有限元模型與三維掃描試驗(yàn)?zāi)P停贚MS.virtual.lab中可以自動(dòng)搜索距離各個(gè)試驗(yàn)測(cè)點(diǎn)最近的有限元節(jié)點(diǎn),實(shí)現(xiàn)試驗(yàn)測(cè)點(diǎn)和有限元節(jié)點(diǎn)的自動(dòng)配對(duì),為下一步模型縮聚做準(zhǔn)備,這避免了傳統(tǒng)測(cè)試手段需要記錄每個(gè)試驗(yàn)測(cè)點(diǎn)的位置坐標(biāo),對(duì)試驗(yàn)測(cè)點(diǎn)和有限元節(jié)點(diǎn)手動(dòng)逐個(gè)配對(duì)的弊端。圖10黃色網(wǎng)格為在最大15 mm容差范圍內(nèi),將有限元模型縮聚,僅保留與試驗(yàn)測(cè)點(diǎn)相對(duì)應(yīng)的節(jié)點(diǎn),共有2179個(gè)有限元節(jié)點(diǎn)與試驗(yàn)?zāi)P拖鄬?duì)應(yīng),黑色圓點(diǎn)表示該試驗(yàn)測(cè)點(diǎn)沒有找到有限元節(jié)點(diǎn)與之對(duì)應(yīng),主要集中在泵架桿和集液環(huán)上,這是因?yàn)橛邢拊P筒捎昧簡(jiǎn)卧囼?yàn)測(cè)點(diǎn)位于結(jié)構(gòu)表面,試驗(yàn)測(cè)點(diǎn)與有限元模型的節(jié)點(diǎn)大于15 mm容差的緣故。
3 氧化劑入口管模態(tài)測(cè)試
液體火箭發(fā)動(dòng)機(jī)中存在大量的細(xì)管路,其與激勵(lì)耦合共振問題十分突出。由于推力室中推進(jìn)劑燃燒激勵(lì)頻率較高,因此主要關(guān)心的是管路的高階振型,需要在管路上布置較多測(cè)點(diǎn)以提高振型分辨率。傳統(tǒng)試驗(yàn)方法主要有兩個(gè)問題:1)管路走向復(fù)雜且表面是弧面,將10 mm×10 mm加速度傳感器以20 mm間距布置到管路表面并非易事,且傳感器的空間位置難以準(zhǔn)確確定;2)附加傳感器質(zhì)量和剛度會(huì)改變細(xì)管路結(jié)構(gòu)動(dòng)力學(xué)特性。
為了具體說明傳感器附加質(zhì)量對(duì)于管路的固有頻率測(cè)量的影響,設(shè)計(jì)了三種不同的試驗(yàn)狀態(tài),如圖11,管路上等間距布置了8個(gè)塑料底座用來安裝固定振動(dòng)傳感器,三種狀態(tài)分別為:狀態(tài)1,整個(gè)管路中只有8個(gè)塑料底座,由于塑料底座重量非常輕,可以認(rèn)為此時(shí)狀態(tài)為管路真實(shí)狀態(tài);狀態(tài)2,中間位置布置了一個(gè)傳感器,即圖11狀態(tài);狀態(tài)3,安裝8個(gè)振動(dòng)傳感器,此狀態(tài)即是傳統(tǒng)方法進(jìn)行模態(tài)測(cè)試的狀態(tài)。
氧化劑入口管的參數(shù)如下:外徑16 mm,內(nèi)徑12 mm,長(zhǎng)度約為 300 mm。傳感器型號(hào) B&K 4524B,重量約為5克。對(duì)于全部三種狀態(tài),采用激光測(cè)試中間位置傳感器附近(圖11激光點(diǎn)位置)的頻響函數(shù),對(duì)于狀態(tài)2,采用LMS測(cè)試系統(tǒng)記錄中間位置傳感器的頻響函數(shù)作為對(duì)比驗(yàn)證。
為了減少隨機(jī)誤差影響,盡量使兩種測(cè)試手段試驗(yàn)狀態(tài)一致。激光采用Burst Random激勵(lì)信號(hào),平均10次,帶寬2000 Hz,譜線數(shù)6400,頻率分辨率為0.3125 Hz,微型激振器激勵(lì)(如圖11)。LMS測(cè)試同樣采用Burst Random激勵(lì)信號(hào),平均10次,帶寬2048 Hz,譜線數(shù)8192,頻率分辨率為0.25 Hz,微型激振器激勵(lì),激勵(lì)力大小和激光測(cè)試方法相同。
圖12為激光對(duì)狀態(tài)1(無傳感器,Laser-zero)、狀態(tài)2(只有一個(gè)傳感器,Laser-one)、狀態(tài)3(有8個(gè)傳感器,Laser-eight),以及LMS測(cè)試系統(tǒng)對(duì)于狀態(tài)2 (只有一個(gè)傳感器,LMS-one)的頻響函數(shù)測(cè)試結(jié)果。選取500 Hz到1800 Hz之間,如圖12所示狀態(tài)1曲線四個(gè)典型的突頻點(diǎn)進(jìn)行分析。
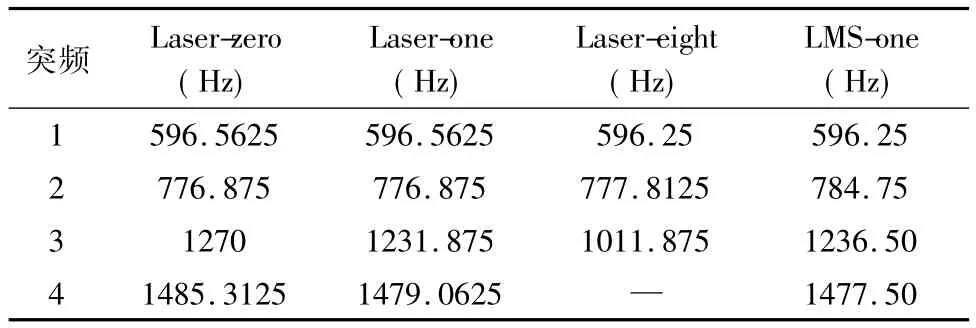
表1 傳感器附加質(zhì)量影響分析Table 1 Analysis of the effect of sensor's added mass
表1給出了對(duì)應(yīng)于狀態(tài)1四個(gè)突頻,其他三個(gè)測(cè)試狀態(tài)所對(duì)應(yīng)的峰值頻率點(diǎn)。從表1及圖12中可以看出,對(duì)于本試驗(yàn)考察的氧化劑入口管,三種狀態(tài)下激光測(cè)得的前兩個(gè)突頻位置的頻響函數(shù)基本重合,說明在小于830 Hz時(shí),傳感器附加質(zhì)量影響還不顯著,但8個(gè)傳感器狀態(tài)在680 Hz處額外出現(xiàn)了一個(gè)峰值;當(dāng)大于830 Hz時(shí),采用8個(gè)傳感器所得的頻響函數(shù)與真實(shí)的頻響函數(shù)相差較大,說明8個(gè)傳感器附加質(zhì)量改變了原管路的結(jié)構(gòu)動(dòng)力學(xué)特性,此時(shí)測(cè)試結(jié)果已不能反映管路真實(shí)的模態(tài)特征。而附加一個(gè)傳感器所得頻響函數(shù)趨勢(shì)上與真實(shí)的頻響函數(shù)一致,只是由于附加質(zhì)量的影響造成峰值對(duì)應(yīng)的頻率稍有下降。在第3個(gè)峰值(1231.875 Hz)相比真實(shí)狀態(tài)(1270 Hz)下降了3%,采用8個(gè)傳感器時(shí)在1011.875 Hz有一個(gè)峰值,無法判斷該處是否對(duì)應(yīng)真實(shí)狀態(tài)1270 Hz處的峰值;采用一個(gè)傳感器第4個(gè)峰值(1479.0625 Hz)相比真實(shí)狀態(tài)(1485.3125 Hz)下降了0.42%,而采用8個(gè)傳感器對(duì)應(yīng)該區(qū)域沒有明顯峰值。
LMS方法和激光測(cè)振方法對(duì)于狀態(tài)2測(cè)量的頻響函數(shù)趨勢(shì)一致,但峰值對(duì)應(yīng)的頻率和幅值稍有差異,這可能是由于傳感器高頻段的測(cè)量誤差,及由于管路表面的弧形,傳感器定位的方向與激光的坐標(biāo)系方向不完全一致導(dǎo)致。
通過以上分析可知,對(duì)于所關(guān)心的管路高頻段,僅采用一個(gè)傳感器的附加質(zhì)量造成固有頻率降低最大達(dá)3%,這足以對(duì)我們的判斷帶來混淆,而采用8個(gè)傳感器進(jìn)行模態(tài)測(cè)試將可能導(dǎo)致錯(cuò)誤的結(jié)果。與傳統(tǒng)測(cè)試方法相比,三維掃描測(cè)振的方法特別適合于測(cè)試該類細(xì)管的振動(dòng)問題,測(cè)點(diǎn)空間位置定位準(zhǔn)確且測(cè)點(diǎn)數(shù)多,對(duì)于分析高頻振動(dòng)對(duì)應(yīng)的復(fù)雜振型十分有利。如圖13所示為激光掃描頭在兩個(gè)空間坐標(biāo)位置處掃描得到的整個(gè)氧化劑入口管模型(與傳感器附加質(zhì)量分析采用的不是同一臺(tái)產(chǎn)品)。圖14為管路的高階振型,各測(cè)點(diǎn)振動(dòng)速度的方向和大小均不同,采用三維掃描測(cè)振技術(shù)可以精確獲取其振動(dòng)模式,各測(cè)點(diǎn)一致性較好。相比于傳統(tǒng)的試驗(yàn)方法,三維掃描測(cè)振技術(shù)的效率更高,完成整個(gè)試驗(yàn)過程只花費(fèi)不到10分鐘。
4 結(jié) 論
通過激光測(cè)振系統(tǒng)與機(jī)器人平臺(tái)結(jié)合,可以實(shí)現(xiàn)對(duì)被測(cè)物體的360度掃描測(cè)量。其優(yōu)點(diǎn)如下:1)不用黏貼振動(dòng)傳感器,測(cè)點(diǎn)數(shù)目多,增加測(cè)點(diǎn)數(shù)目很方便,不會(huì)顯著增加工作量,無傳感器附加質(zhì)量的影響。2)振型的準(zhǔn)確度高,一致性好。3)測(cè)試過程自動(dòng)化,對(duì)同一批次的產(chǎn)品只需一次編程就可實(shí)現(xiàn)多次測(cè)量。4)可以實(shí)現(xiàn)對(duì)于微小、高溫、輻射等場(chǎng)合下,傳統(tǒng)方式無法實(shí)現(xiàn)的模態(tài)測(cè)試。
由其測(cè)試原理可知,三維掃描測(cè)振技術(shù)存在如下缺點(diǎn):1)只能測(cè)量被測(cè)結(jié)構(gòu)外表面的振動(dòng)情況,對(duì)于內(nèi)部及有遮擋的區(qū)域無能為力。2)對(duì)于自由-自由狀態(tài)的模態(tài)測(cè)試,定義完掃描點(diǎn)后,這些點(diǎn)的空間位置坐標(biāo)就已經(jīng)確定了,整個(gè)測(cè)試過程被測(cè)物體不能移動(dòng)。3)由于機(jī)器人手臂長(zhǎng)度限制,激光掃描頭能達(dá)到的空間范圍有限,因此被測(cè)物體尺寸不能太大。總之,激光測(cè)振手段拓寬了模態(tài)試驗(yàn)的能力范圍,提高了模態(tài)測(cè)試的精度。隨著激光測(cè)振這種非接觸式測(cè)試手段的普及,將會(huì)進(jìn)一步促進(jìn)相關(guān)性分析、誤差定位、模型修正、故障檢測(cè)等相關(guān)學(xué)科的發(fā)展。
[1] 梁俊龍,譚永華,孫宏明.補(bǔ)燃發(fā)動(dòng)機(jī)總體布局動(dòng)態(tài)設(shè)計(jì)研究[J].火箭推進(jìn),2005,31(4):1-7.[Liang Jun-long,Tan Yong-hua,Sun Hong-ming.Dynamic design research of stagedcombustion engine overalllayout[J].JournalofRocket Propulsion,2005,31(4):1-7.]
[2] 丁繼峰,韓增堯,馬興瑞.大型復(fù)雜航天器結(jié)構(gòu)有限元模型的驗(yàn)證策略研究[J].宇航學(xué)報(bào),2010,31(2):547-555.[Ding Ji-feng,Han Zeng-yao,Ma Xing-rui.Finite element verification strategy of large complex spacecraft[J].Journal of Astronautics,2010,31(2):547-555.]
[3] Ewins D J.Modal testing:theory and practice[M].Letchworth: Research Studies Press,1995.
[4] 邱吉寶,王建民.運(yùn)載火箭模態(tài)試驗(yàn)仿真技術(shù)研究新進(jìn)展[J].宇航學(xué)報(bào),2007,28(3):515-521.[Qiu Ji-bao,Wang Jian-min.The recent progresses on research into modal test simulation techniques for launch vehicles[J].Journal of Astronautics,2007,28(3):515-521.]
[5] 黎定仕,張以都,王慶.導(dǎo)引頭部件結(jié)構(gòu)動(dòng)態(tài)特性分析[J].宇航學(xué)報(bào),2008,29(3):799-803.[Li Ding-shi,Zhang Yidu,Wang Qing.Analysis of dynamic characteristics of guidance head components[J].Journal of Astronautics,2008,29(3): 799-803.]
[6] 何龍軍,練繼建,馬斌,等.基于距離系數(shù)-有效獨(dú)立法的大型空間結(jié)構(gòu)傳感器優(yōu)化布置[J].振動(dòng)與沖擊,2013,32 (16):13-18.[He Long-jun,Lian Ji-jian,Ma Bin,et al.Optimal sensor placement for large space structures based on distance coefficient-effective independence method[J].Journal of Vibration and Shock,2013,32(16):13-18.]
[7] 劉偉,高維成,李惠,等.基于有效獨(dú)立的改進(jìn)傳感器優(yōu)化布置方法研究[J].振動(dòng)與沖擊,2013,32(6):54-62.[Liu Wei,Gao Wei-cheng,Li Hui,et al.Improved optimal sensor placement methods based on effective independence[J].Journal of Vibration and Shock,2013,32(6):54-62.]
[8] 榮雙龍,李傳日,徐飛,等.實(shí)驗(yàn)?zāi)B(tài)分析最佳測(cè)試點(diǎn)選取方法的優(yōu)化[J].北京航空航天大學(xué)學(xué)報(bào),2014,40(4):536-543.[Rong Shuang-long,Li Chuan-ri,Xu Fei,et al.Method optimization of optimum measurement point selection in experiential modal analysis[J].Journal of Beijing University of Aeronautics and Astronautics,2014,40(4):536-543.]
[10] Doupe C C,Swenson E D,George L E,et al.Finite element model tuning with 3D mode shapes from FalconSAT-5[C].50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics,and Materials Conference,Palm Springs,California,May 4-7,2009.
[11] Doupe C C,Swenson E D,George L E,et al.Finite element model tuning with varying experimental data density[C].AIAA Modeling and Simulation Technologies Conference,Illinois,Chicago,August 10-13,2009.
[12] 李暉,孫偉,許卓,等.基于激光旋轉(zhuǎn)掃描的約束態(tài)薄壁圓柱殼模態(tài)振型測(cè)試新方法[J].振動(dòng)與沖擊,2014,33(16): 155-159.[Li Hui,Sun Wei,Xu Zhuo,et al.Experimental method of laser rotating scanning to measure mode shapes of constrained thin cylindrical shell[J].Journal of vibration and shock,2014,33(16):155-159.]
[13] Oliver D E,Schuessler M.Fully automated robot-based 3-dimensional vibration measurement system for modal analysis and structural health monitoring[C].Proceedings of the IMACXXVII,Orlando,F(xiàn)lorida USA,F(xiàn)ebruary 9-12,2009.
[14] Ewins D J,Stanbridge A B,Dimaio D.Continuous-scanning LDV Full-Field measurement of vibration deflection shapes for modal analysis[C].Proceedings of the IMAC-XXVII,Orlando,F(xiàn)lorida USA,F(xiàn)ebruary 9-12,2009.
通信地址:西安市長(zhǎng)安區(qū)15號(hào)信箱11分箱(710100)
電話:(029)85207148
E-mail:ys060599@126.com
(編輯:張宇平)
Application of 3-D Scanning Vibrometry Technique in Liquid Rocket Engine Modal Test
YAN Song,LI Bin,LI Bin-chao,LI Feng
(Science and Technology on Liquid Rocket Engines Laboratory,Xi’an Aerospace Propulsion Institute,Xi’an 710100,China)
There are some problems with the traditional modal test method by pasting vibration sensors,such as influences of additional sensor mass,low mode shape resolution,etc.In order to solve these problems,3-D scanning measuring technique based on laser Doppler vibrometry and robot platform are studied.Taking the case of liquid rocket engine(LRE)combustion chamber and oxidant entrance pipe,modal tests based on 3-D scanning measuring technique are carried out and high spatial resolution mode shapes are obtained.The effect of the additional mass of the sensors on the pipe modal test results is analyzed quantitatively.The results show that 3-D scanning measuring method has the advantage of high precision,fast test speed,and unlimited number of measuring points,etc.
3-D scanning;Laser Doppler vibrometry;Liquid rocket engine;Robot
V416.2
A
1000-1328(2017)01-0097-07
10.3873/j.issn.1000-1328.2017.01.013
閆 松(1988-),男,博士生,主要從事液體火箭發(fā)動(dòng)機(jī)結(jié)構(gòu)動(dòng)力學(xué)建模、模型修正及模態(tài)試驗(yàn)研究。
2016-05-22;
2016-08-14
猜你喜歡
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
計(jì)算物理(2014年2期)2014-03-11 17:01:39
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
