基于軟件接收機(jī)的衛(wèi)星導(dǎo)航信號模擬器性能指標(biāo)測試
2017-03-27 05:55:17歐國標(biāo)
計(jì)算機(jī)測量與控制 2017年3期
關(guān)鍵詞:信號
歐國標(biāo),路 輝
(北京航空航天大學(xué) 電子信息工程學(xué)院,北京 100191)
基于軟件接收機(jī)的衛(wèi)星導(dǎo)航信號模擬器性能指標(biāo)測試
歐國標(biāo),路 輝
(北京航空航天大學(xué) 電子信息工程學(xué)院,北京 100191)
針對衛(wèi)星導(dǎo)航信號模擬器的性能指標(biāo)測試評估問題,提出了基于軟件接收機(jī)的性能指標(biāo)測試方法;通過分析模擬器性能,包括對動(dòng)態(tài)性能、相位噪聲、通道間時(shí)延一致性和靜態(tài)定位精度的綜合分析,給出了相應(yīng)的測試方法和測試流程,并結(jié)合衛(wèi)星導(dǎo)航信號模擬器產(chǎn)生的實(shí)際信號對各項(xiàng)性能指標(biāo)的測試結(jié)果進(jìn)行分析;經(jīng)測試結(jié)果表明,軟件接收機(jī)可以有效地對衛(wèi)星導(dǎo)航信號模擬器各項(xiàng)性能指標(biāo)進(jìn)行測試,測試結(jié)果符合理論預(yù)期,滿足模擬器性能指標(biāo)測試評估的需求。
衛(wèi)星導(dǎo)航信號模擬器;性能指標(biāo);軟件接收機(jī)
0 引言
衛(wèi)星導(dǎo)航接收機(jī)應(yīng)用于高精尖技術(shù)領(lǐng)域時(shí),其輸出測量數(shù)據(jù)的準(zhǔn)確性、可靠性至關(guān)重要。然而實(shí)際應(yīng)用中,實(shí)際信號的各種參數(shù)以及測試環(huán)境的局限性,導(dǎo)航接收機(jī)的測試和計(jì)量直接依賴于衛(wèi)星導(dǎo)航信號模擬源提供的技術(shù)指標(biāo),為保證日益增長的接收機(jī)設(shè)備測試需求和正確可靠評估的需要,在衛(wèi)星導(dǎo)航應(yīng)用測試系統(tǒng)建設(shè)過程中,建立標(biāo)準(zhǔn)的、完善的衛(wèi)星導(dǎo)航信號模擬源指標(biāo)測量方法極其重要。它的建立,首先能夠滿足導(dǎo)航信號模擬源對自身性能的檢驗(yàn)及指標(biāo)的測試任務(wù),解決衛(wèi)星導(dǎo)航信號模擬源自身穩(wěn)定性及可控性的難題。其次它能最大程度上規(guī)范接收機(jī)的性能和指標(biāo),形成統(tǒng)一的標(biāo)準(zhǔn),推動(dòng)接收機(jī)規(guī)范化、標(biāo)準(zhǔn)化發(fā)展。
目前國內(nèi)對此已有相關(guān)的研究,北京郵電大學(xué)吳偉陵教授研究了衛(wèi)星導(dǎo)航信號模擬源的工作原理及結(jié)構(gòu)組成,對模擬源的結(jié)構(gòu)組成及指標(biāo)體系展開詳細(xì)分析。該研究首先對模擬源基本量的通用儀器測量方法進(jìn)行了調(diào)查,在基本量測量實(shí)現(xiàn)的基礎(chǔ)上,依據(jù)各個(gè)關(guān)鍵指標(biāo)及模擬源信號生成的特點(diǎn),給出了基于通用儀器的測量方法[1];北京航空航天大學(xué)寇艷紅副教授發(fā)表了《基于PXIe總線的多GNSS射頻信號模擬器驗(yàn)證測試》,提出了一套模擬器技術(shù)指標(biāo)的四級驗(yàn)證方法,包括模擬中頻/射頻信號級,基帶信號級,觀測量和導(dǎo)航電文級,定位解級。所采用的一套包括標(biāo)準(zhǔn)儀器、多GNSS軟件接收機(jī)和專門分析軟件在內(nèi)的信號質(zhì)量檢測系統(tǒng)。其獨(dú)特的信號處理和數(shù)據(jù)處理方法提高了信號的可觀測性和測量精度。這種四級驗(yàn)證測試方法提供了信號質(zhì)量的多層次精確描述,可推廣應(yīng)用于空間信號的質(zhì)量評估[2];中南大學(xué)盛利元教授發(fā)表了圍繞模擬源指標(biāo)的測量校準(zhǔn)方法與溯源技術(shù),研究了模擬源信號精度和動(dòng)態(tài)兩類指標(biāo)的通用儀器測量校準(zhǔn)方法。基于傳統(tǒng)的溯源方法及模擬源特點(diǎn),提出了測量保證程序模擬源溯源方案。結(jié)合通用儀器關(guān)鍵指標(biāo)測量方法,實(shí)現(xiàn)了模擬源關(guān)鍵指標(biāo)的溯源[3]。
本文提出衛(wèi)星導(dǎo)航信號模擬器性能指標(biāo)測試方法,對關(guān)鍵指標(biāo)項(xiàng)進(jìn)行了分析,并基于軟件接收機(jī)給出相應(yīng)的測試方法,具有測試流程簡單和操作方便的特點(diǎn)。
1 軟件接收機(jī)測試平臺
本文中測試所采用軟件接收機(jī)為北京航空航天大學(xué)通信導(dǎo)航與測試實(shí)驗(yàn)室研發(fā)的SatRecv,運(yùn)行界面如圖 1所示。

圖1 軟件接收機(jī)運(yùn)行界面
軟件接收機(jī)SatRecv包括9個(gè)處理模塊:初始化模塊,負(fù)責(zé)對接收機(jī)進(jìn)行初始化,完成擴(kuò)頻碼、載波和各模塊的初始配置;數(shù)據(jù)模塊,負(fù)責(zé)從信號源或文件系統(tǒng)采集數(shù)據(jù);捕獲模塊:完成信號的捕獲,可分為粗略捕獲和精確捕獲兩個(gè)部分;跟蹤模塊,完成信號的跟蹤;同步模塊,實(shí)現(xiàn)對相關(guān)結(jié)果的同步,包括位同步和幀同步;解碼模塊,根據(jù)不同衛(wèi)星系統(tǒng)實(shí)現(xiàn)星歷的解碼;偽距模塊,根據(jù)跟蹤狀態(tài)信息和衛(wèi)星信息提取偽距信息;定位模塊,實(shí)現(xiàn)衛(wèi)星、接收機(jī)的定位解算;擴(kuò)展模塊,用于實(shí)現(xiàn)用戶的擴(kuò)展功能[4]。
軟件接收機(jī)的運(yùn)行流程及各部分輸出參數(shù)示意圖如圖 2所示。
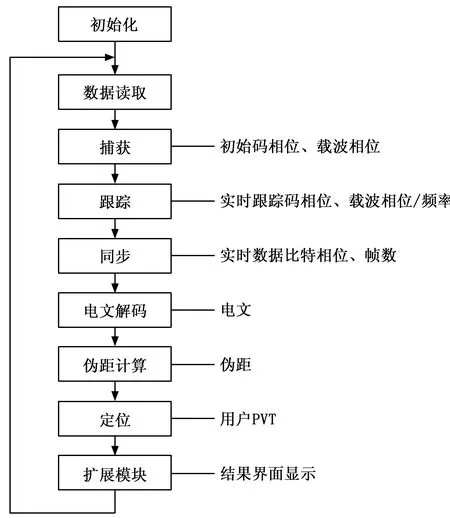
圖2 軟件接收機(jī)流程圖
衛(wèi)星導(dǎo)航信號模擬器關(guān)鍵指標(biāo)通過分析圖 2中各相關(guān)模塊輸出的參數(shù),進(jìn)行直接測試或間接計(jì)算得到測量值。
各性能指標(biāo)項(xiàng)的測試方法為:靜態(tài)定位精度,通過分析定位結(jié)果與模擬器設(shè)置的用戶位置的偏差得到;動(dòng)態(tài)性能指標(biāo),包括速度、加速度和加加速度的范圍及精度,通過分析定位結(jié)果隨時(shí)間的一次變化率、二次變化率及三次變化率得到;相位噪聲,通過分析跟蹤模塊輸出的載波相位的抖動(dòng)程度,計(jì)算得到均方相位噪聲值;通道間時(shí)延一致性,通過分析跟蹤模塊輸出的兩通道載波相位差得到。
2 性能指標(biāo)
本文中測試所用衛(wèi)星導(dǎo)航信號模擬器為北京航空航天大學(xué)通信導(dǎo)航與測試實(shí)驗(yàn)室的自研設(shè)備,以下各項(xiàng)性能指標(biāo)均是基于該模擬器進(jìn)行分析,模擬器實(shí)物圖如圖 3所示。
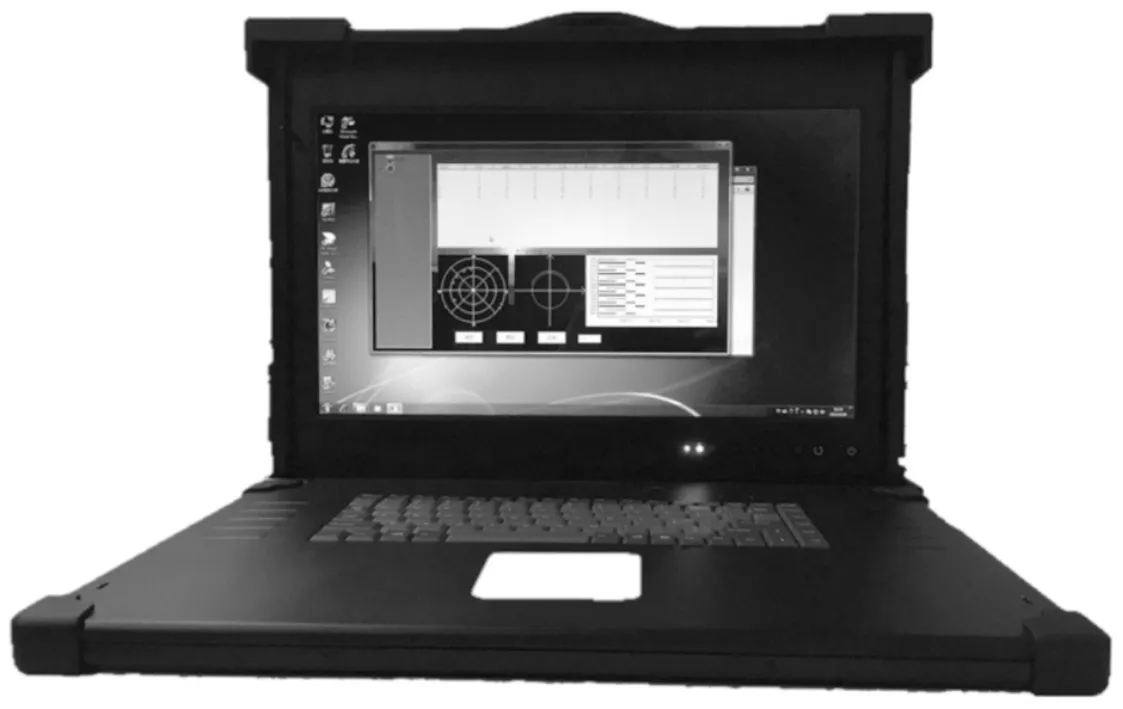
圖3 GNSS信號模擬器
2.1 動(dòng)態(tài)性能
動(dòng)態(tài)性能指標(biāo)項(xiàng)包含速度、加速度以及加加速度的范圍與精度。模擬器在實(shí)現(xiàn)時(shí),碼相位和載波相位均由直接數(shù)字式頻率合成器DDS控制,模擬器采用三階DDS[5],以實(shí)現(xiàn)高精度、高動(dòng)態(tài)的信號模擬,
動(dòng)態(tài)性能指標(biāo)由DDS級數(shù)、累加器位寬、信號碼速率、載波速率以及模擬器系統(tǒng)時(shí)鐘頻率決定。
2.2 相位噪聲
相位擾動(dòng)包含兩種:一種是由環(huán)境溫度變化、元器件老化等因果關(guān)系引起的振蕩器頻率偏移和頻率漂移;另一種是指器件內(nèi)部熱噪聲、閃爍噪聲等隨機(jī)因素引起的隨機(jī)相位波動(dòng),主要影響頻率源的短期頻率穩(wěn)定度,相位噪聲即是隨機(jī)因素引起的頻率源相位隨機(jī)波動(dòng)[6]。
一個(gè)實(shí)際振蕩器輸出信號的數(shù)學(xué)模型可表示為:
V(t)=(A0+ε(t))sin(2πf0t+φ(t))
(1)
一般振蕩器的相位噪聲調(diào)制功率遠(yuǎn)大于幅度噪聲調(diào)制功率,因此不考慮振幅波動(dòng)帶來的噪聲。
相位噪聲可在時(shí)域中用輸出信號頻率的抖動(dòng)的程度表示,也可以在頻域中表示為偏離載波f處,一個(gè)相位調(diào)制邊帶的功率密度與載波功率的比值[7],如圖 4所示。
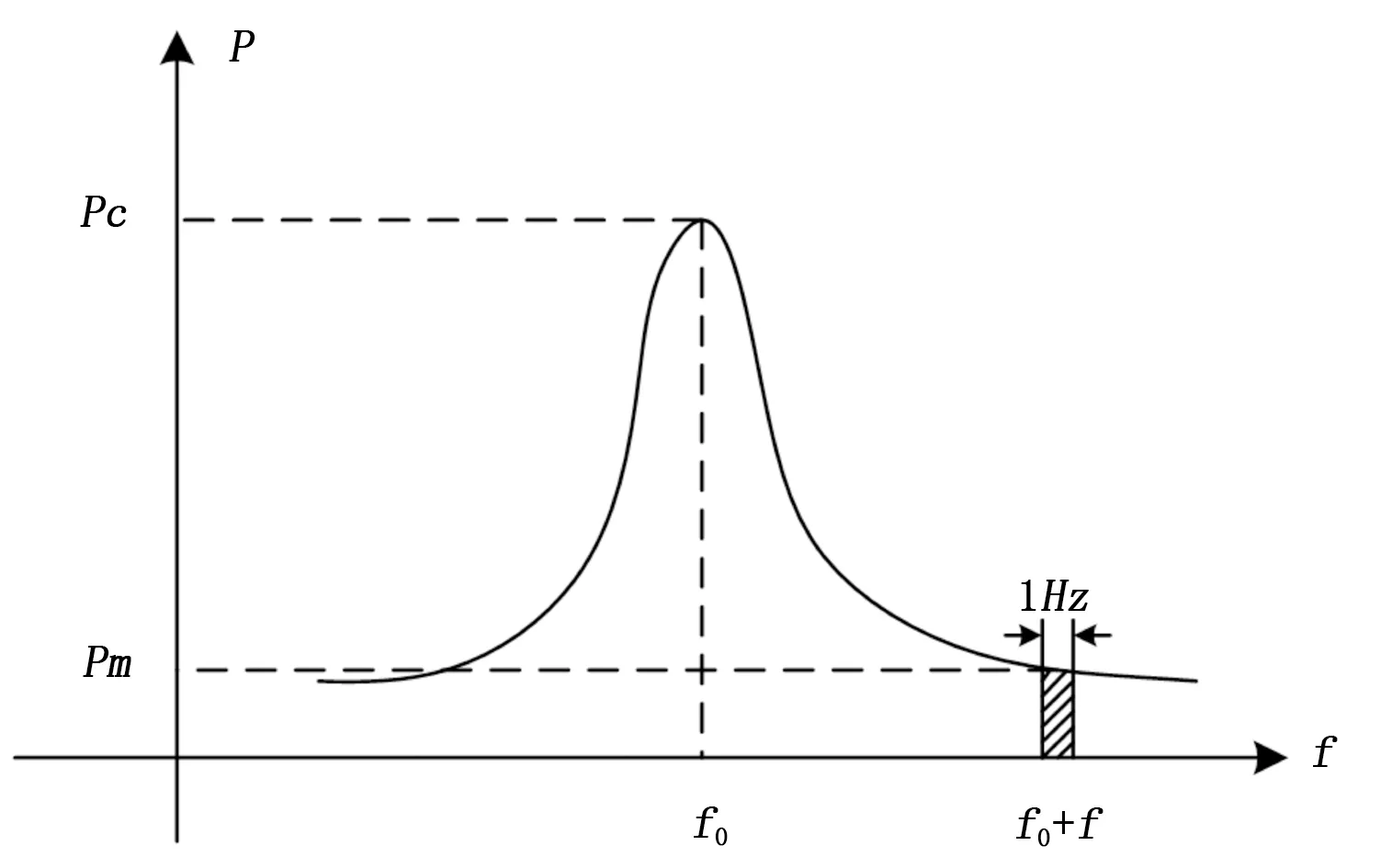
圖4 相位噪聲的頻域表征
其中:Pm為頻偏f處單位頻率內(nèi)的單邊帶噪聲能量,Pc為載波功率。
2.3 通道間時(shí)延一致性
模擬器通道間時(shí)延一致性反映通道間模擬信號相位的一致性,即模擬器任兩個(gè)通道在調(diào)制同一顆衛(wèi)星信號時(shí),在射頻輸出端引起的偽碼相位不同偏差和載波相位不同偏差,均可由模擬器通道間時(shí)延一致性精度表示。
本文中采用衛(wèi)星導(dǎo)航信號模擬器是基于FPGA實(shí)現(xiàn)信號的調(diào)制,布局布線時(shí)不同的調(diào)制通道經(jīng)過的硬件電路不同,導(dǎo)致各通道路徑延遲不同。其中,各通道因調(diào)制過程引入的通道固有時(shí)間延遲(由布線路徑的系統(tǒng)時(shí)鐘周期數(shù)和系統(tǒng)時(shí)鐘頻率決定)在導(dǎo)航定位解算時(shí)可歸為接收機(jī)的鐘差項(xiàng);而通道調(diào)制路徑延遲的差異則體現(xiàn)為通道間時(shí)延一致性。
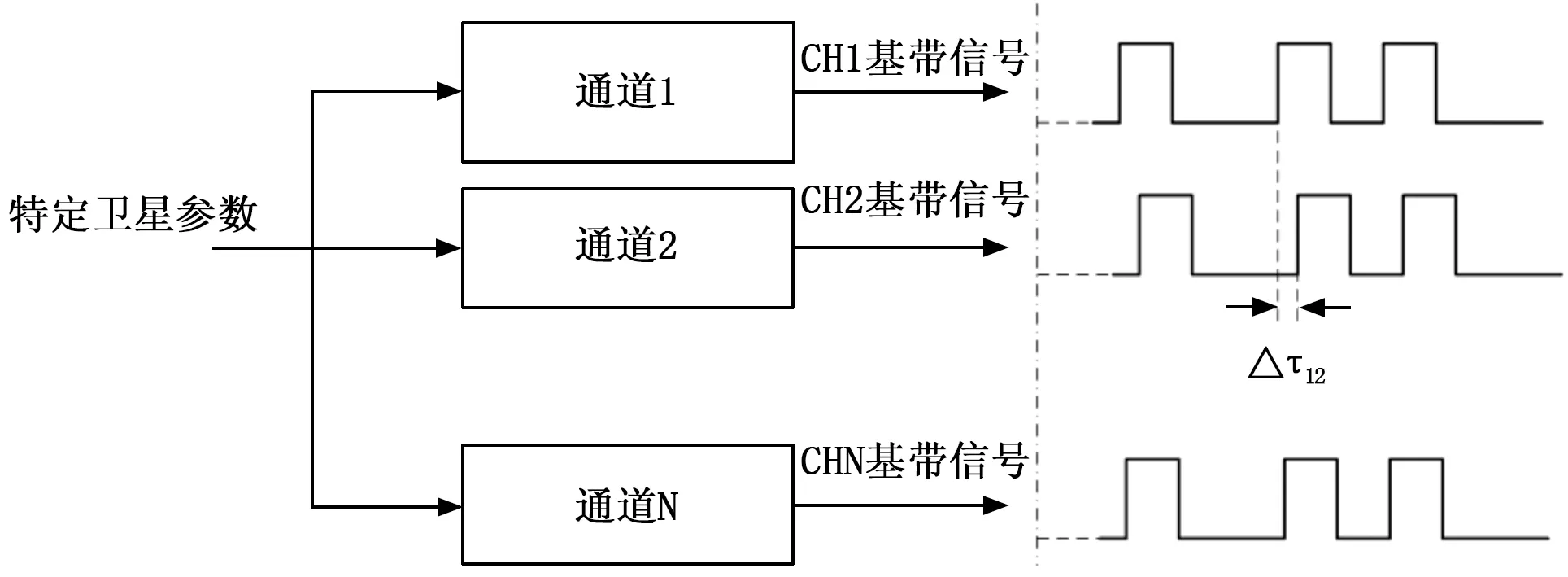
圖5 通道間路徑時(shí)延示意圖
2.4 靜態(tài)定位精度
定位精度體現(xiàn)導(dǎo)航信號模擬器的整體性能,表現(xiàn)為軟件接收機(jī)解算的用戶位置結(jié)果與模擬器設(shè)置的用戶位置的偏差。靜態(tài)定位精度是在保持用戶位置相對于大地坐標(biāo)系靜止的狀態(tài)下,通過測試位置偏差的均方值得到,取決于模擬器軟硬件穩(wěn)定性、工程實(shí)現(xiàn)原理以及環(huán)境因素。
3 性能指標(biāo)測試方法及結(jié)果
3.1 動(dòng)態(tài)性能
3.1.1 速度
設(shè)置用戶初始位置的緯經(jīng)高坐標(biāo)為(40°,60°,1 000m),運(yùn)動(dòng)的北向偏角為45°。首先設(shè)置用戶的速度為1 000m/s,中頻頻率為4.123MHz,采樣率為24MHz。仿真開始時(shí)間為2013年3月20日,12:43:00,測試時(shí)間為5分鐘,利用軟件接收機(jī)得到測試結(jié)果如圖6所示。
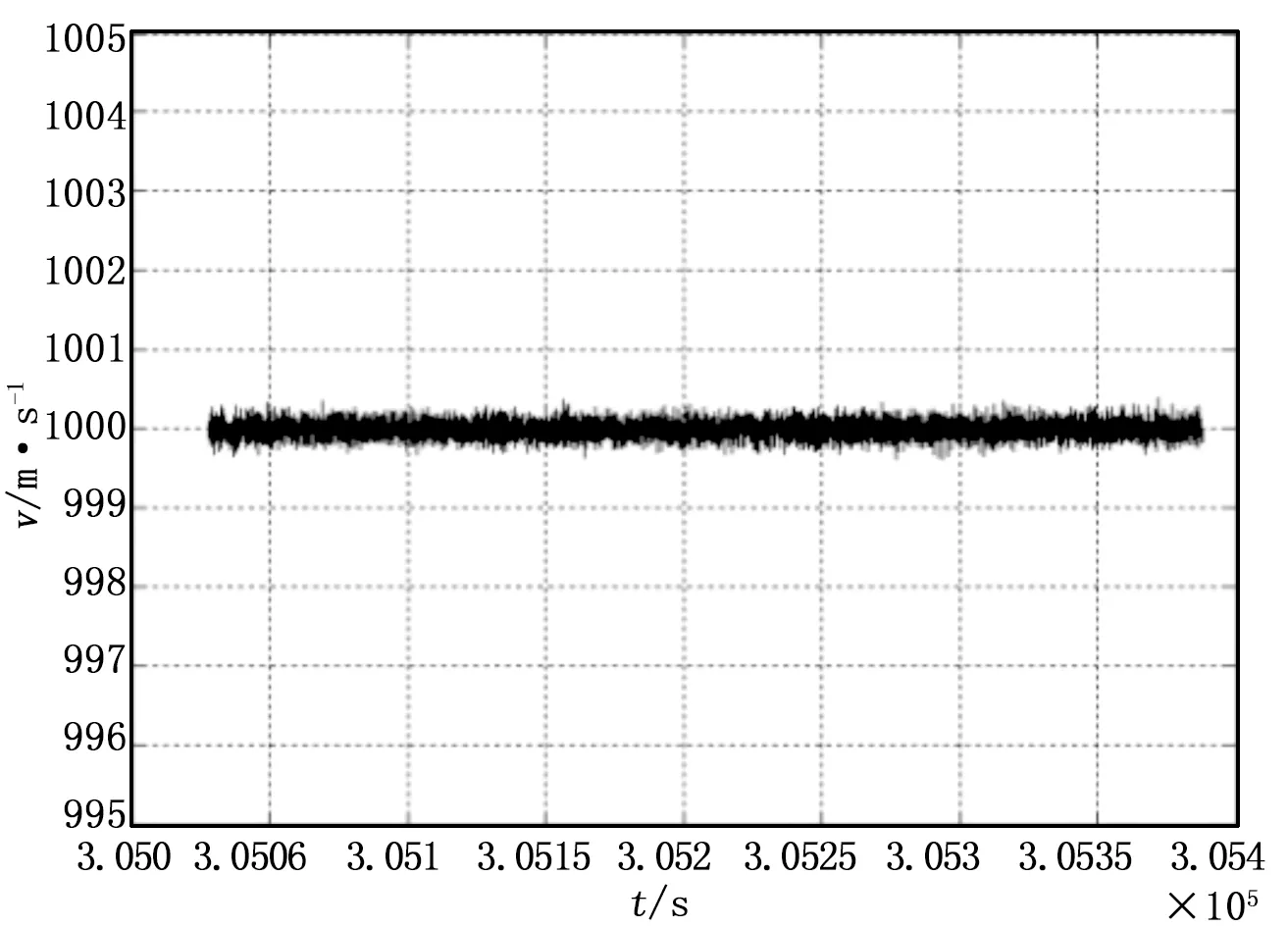
圖6 GPS L1 C/A信號在速度為1 000 m/s時(shí)測試結(jié)果
測試結(jié)果的速度均值為999.988 8m/s,偏差為-0.011 2m/s,標(biāo)準(zhǔn)差為0.106 1m/s。

表1 GPS L1 C/A信號在速度為1 000 m/s時(shí)測試結(jié)果表
保持中頻頻率和數(shù)字采樣率不變,設(shè)置用戶載體的運(yùn)動(dòng)速度為12 000m/s,測試時(shí)間為5分鐘,得到的結(jié)果如圖 7所示。
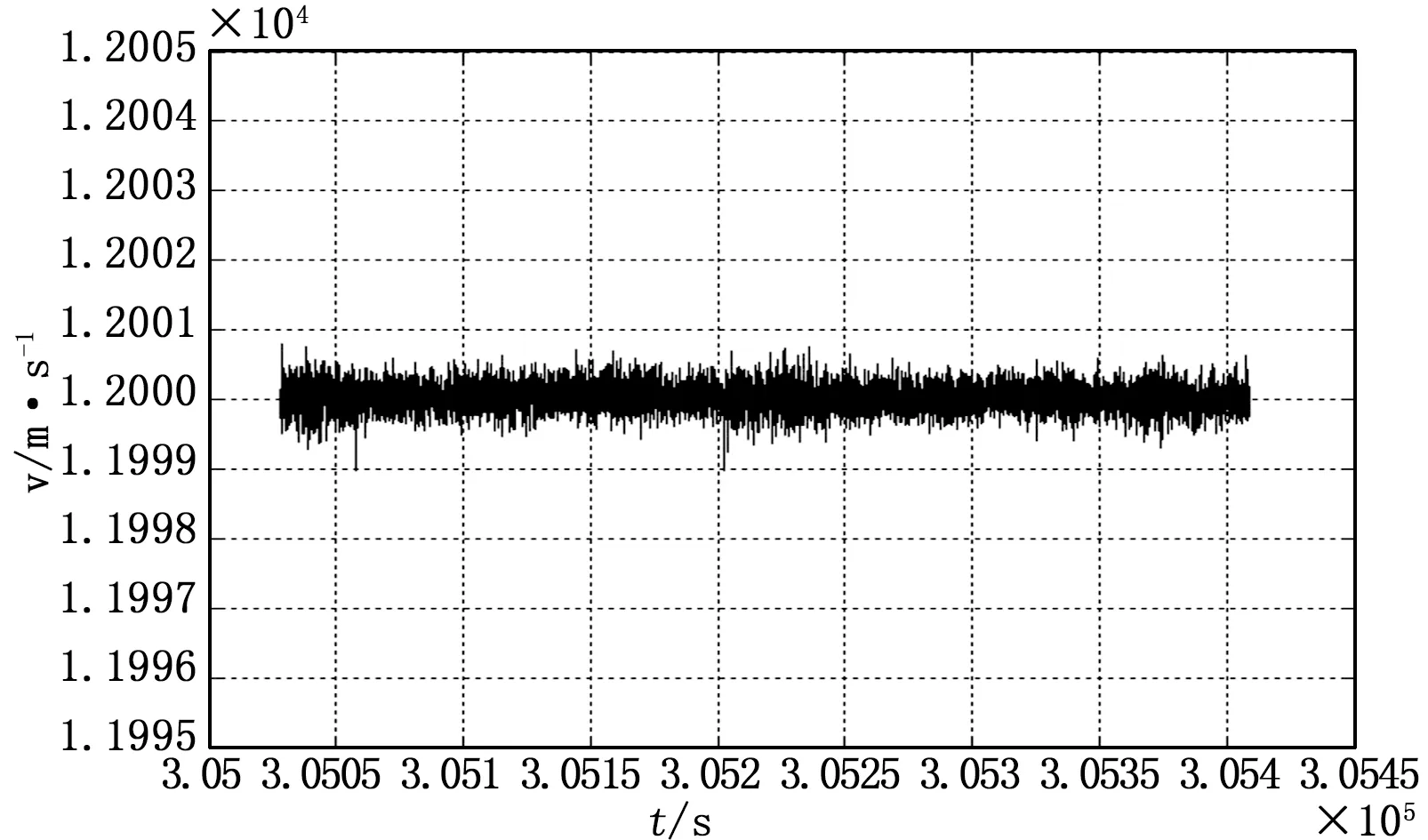
圖7 GPS L1 C/A信號在速度為12 000 m/s時(shí)測試結(jié)果
測試結(jié)果的速度均值為12 000.030 3m/s,偏差為0.030 3m/s,標(biāo)準(zhǔn)差為0.189 8m/s。

表2 GPS L1 C/A信號在速度為12 000 m/s時(shí)測試結(jié)果表
3.1.2 加速度
根據(jù)速度的測試結(jié)果,加速度的測試采用“先正向,后負(fù)向”的方式進(jìn)行測試,即當(dāng)速度超過10 000m/s時(shí),加速度為負(fù)值;當(dāng)速度低于100m/s時(shí),加速度為正值。
存在為了保證財(cái)政撥給高等院校的運(yùn)營經(jīng)費(fèi)不留余額和下年度運(yùn)營經(jīng)費(fèi)的預(yù)算額度考慮,財(cái)務(wù)部門往往會將項(xiàng)目(課題)報(bào)銷支出的經(jīng)費(fèi)串戶從財(cái)政零余額賬戶資金或財(cái)政直接支付賬戶支付,截留了項(xiàng)目(課題)課題經(jīng)費(fèi)。
設(shè)置用戶初始位置的緯經(jīng)高坐標(biāo)為(40°,60°,1 000m),運(yùn)動(dòng)的北向偏角為45°,用戶的加速度設(shè)置為100m/s2。中頻頻率為4.123MHz,采樣率為24MHz。仿真開始時(shí)間為2013年3月20日,12:43:00,測試時(shí)間為5分鐘,利用軟件接收機(jī)得到的測試結(jié)果如圖8所示。
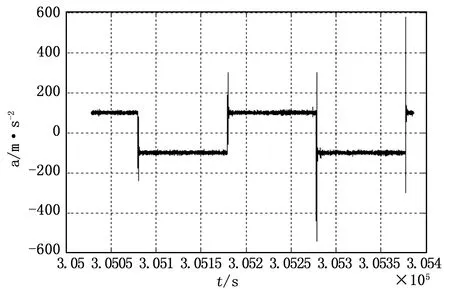
圖8 GPS L1 C/A信號在加速度為100 m/s2時(shí)測試結(jié)果圖
當(dāng)加速度為負(fù)值時(shí),接收機(jī)解算得到加速度均值為-99.997 8m/s2,偏差為0.002 2m/s2,標(biāo)準(zhǔn)差為4.635 5m/s2;當(dāng)加速度為正值時(shí),接收機(jī)解算得到加速度均值為100.005 5m/s2,偏差為0.005 5m/s2,標(biāo)準(zhǔn)差為4.727 5m/s2。

表3 GPS L1 C/A信號在加速度為100 m/s2時(shí)的測試結(jié)果表
保持中頻頻率和數(shù)字采樣率不變,設(shè)置用戶載體的運(yùn)動(dòng)速度為500m/s2,測試時(shí)間為2分鐘,得到的結(jié)果如圖 9所示。
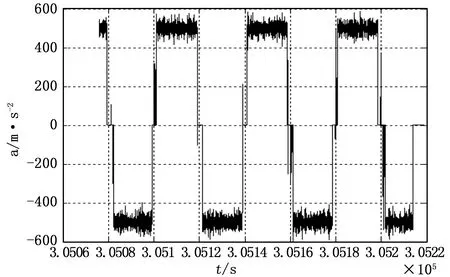
圖9 GPS L1 C/A信號在加速度為500 m/s2時(shí)的測試結(jié)果圖
當(dāng)加速度為負(fù)值時(shí),通過接收機(jī)解算得到的加速度均值為-499.908 7m/s2,與真實(shí)值的誤差為0.091 3m/s2,標(biāo)準(zhǔn)差為27.403 8m/s2;當(dāng)加速度為正值時(shí),通過接收機(jī)解算得到的加速度均值為500.113 9m/s2,與真實(shí)值的誤差為0.113 9m/s2,標(biāo)準(zhǔn)差為26.384 0m/s2。

表4 GPS L1 C/A信號在加速度為500 m/s2時(shí)的測試結(jié)果表
3.1.3 加加速度
根據(jù)之前速度測試和加速度測試的結(jié)果,加加速度的測試也采用“先正向,后負(fù)向”的方式進(jìn)行。但需要同時(shí)滿足速度和加速度兩方面的要求,即當(dāng)速度超過10 000m/s時(shí),加速度為負(fù)值;當(dāng)速度低于100m/s時(shí),加速度為正值;當(dāng)加速度超過200m/s2時(shí),加加速度為負(fù)值;當(dāng)加加速度低于10m/s2時(shí),加加速度為正值。
設(shè)置用戶初始位置的緯經(jīng)高坐標(biāo)為(40°,60°,1 000m),運(yùn)動(dòng)的北向偏角為45°,用戶的加加速度設(shè)置為500m/s3。中頻頻率為4.123MHz,采樣率為24MHz。仿真開始時(shí)間為2013年3月20日,12:43:00,測試時(shí)間為2分鐘,利用軟件接收機(jī)得到的測試結(jié)果如圖10。
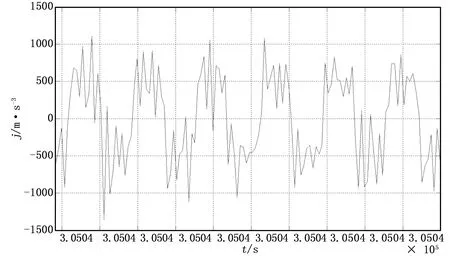
圖10 GPS L1 C/A信號在加加速度為500 m/s3時(shí)的測試結(jié)果圖
當(dāng)加加速度為負(fù)值時(shí),通過接收機(jī)解算得到的加速度均值為-507.810 9m/s3,與真實(shí)值的誤差為-7.810 9m/s3,標(biāo)準(zhǔn)差為220.065 3m/s3;當(dāng)加速度為正值時(shí),通過接收機(jī)解算得到的加速度均值為505.899 4m/s3,與真實(shí)值的誤差為5.899 4m/s3,標(biāo)準(zhǔn)差為303.315 6m/s3。

表5 GPS L1 C/A信號在加速度為500 m/s3時(shí)的測試結(jié)果表
3.2 相位噪聲
設(shè)置:用戶的位置是靜止的,緯經(jīng)高坐標(biāo)為(40°,60°,1000m),不考慮多普勒效應(yīng)的影響,GPSL1C/A信號的中頻頻率為42.966MHz,采樣率為62MHz。仿真開始時(shí)間為2013年3月20日,12:43:00。
實(shí)際測試時(shí),相位抖動(dòng)歸一化差值隨時(shí)間的變化如圖 12所示。

圖11 跟蹤環(huán)路輸出載波相位

圖12 相位差隨時(shí)間的變化
分析相位抖動(dòng)的均方差,求得相位噪聲為:εφ=0.003rad/RMS。
3.3 通道間時(shí)延一致性
設(shè)置用戶的位置靜止,緯經(jīng)高坐標(biāo)為(40°,60°,1 000m),不考慮多普勒效應(yīng)的影響,GPSL1C/A信號的中頻頻率為42.966MHz,采樣率為62MHz。仿真開始時(shí)間為2013年3月20日,12:43:00,可見星為1、12、14、18、22、24、25、30和31。
采用軟件接收機(jī)的跟蹤環(huán)路對模擬信號中各顆衛(wèi)星的載波相位進(jìn)行跟蹤,每1ms輸出各通道的載波跟蹤相位,相互作差并換算得到通道間的時(shí)間差。測試時(shí),以12號星的載波跟蹤相位作為參考相位,計(jì)算與其它可見星的歸一化載波跟蹤相位差。
以14號星為例,計(jì)算與12號星的載波跟蹤相位差,測試時(shí)長5分鐘,結(jié)果如圖 13所示。
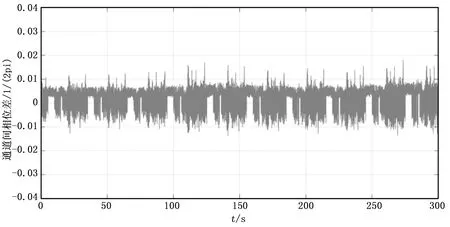
圖13 12號星與14號星載波跟蹤相位差(5 min)
求其均值,為0.002 655。同理對其它可見星重復(fù)以上測試流程,得到各顆可見星與12號星的載波相位跟蹤誤差見表6。
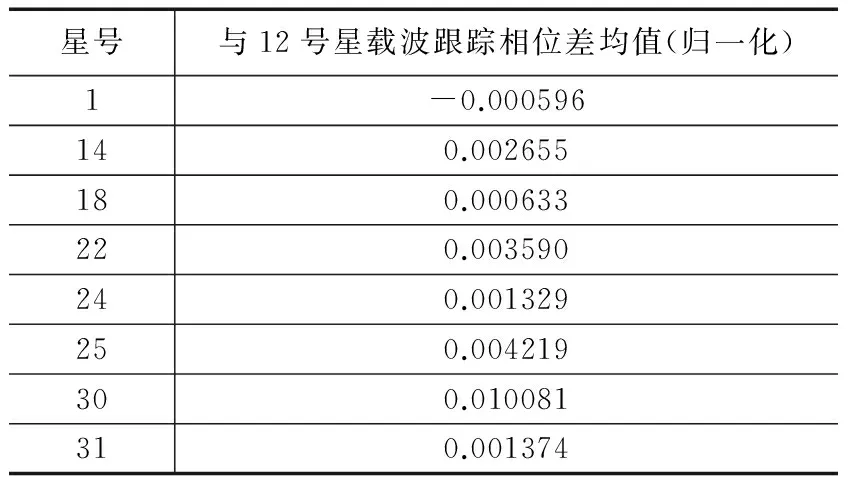
表6 各可見星與12號星的載波跟蹤相位差測試結(jié)果
對以上結(jié)果計(jì)算標(biāo)準(zhǔn)差,有σφ=0.003295,則得到各通道間時(shí)延標(biāo)準(zhǔn)差為:
(2)
其中:fIF=42.966MHz,為模擬信號中頻頻率。
3.4 靜態(tài)定位精度
設(shè)置:用戶的位置是靜止的,緯經(jīng)高坐標(biāo)為(40°,116°,1 000)。不考慮多普勒效應(yīng)的影響,GPSL1C/A信號的中頻頻率為4.123MHz,采樣率為24MHz。仿真開始時(shí)間為2013年3月20日,12:43:00。
由軟件接收機(jī)定位模塊輸出x,y,z三個(gè)坐標(biāo)分量的解算結(jié)果,如圖 14所示。
對各坐標(biāo)分量進(jìn)行分析,對比定位結(jié)果與設(shè)置位置的偏差與標(biāo)準(zhǔn)差,結(jié)果見表 7。
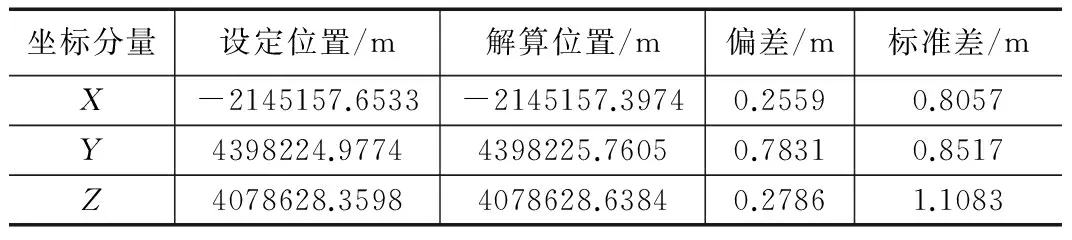
表7 GPS L1 C/A 靜態(tài)定位分析結(jié)果
4 結(jié)束語
本文分析了衛(wèi)星導(dǎo)航信號模擬器的關(guān)鍵性能指標(biāo)的原理及特點(diǎn),提出基于軟件接收機(jī)的性能指標(biāo)測試方法。接收機(jī)各模塊對模擬信號進(jìn)行結(jié)算并輸出數(shù)據(jù),然后根據(jù)各性能指標(biāo)的測試要求對數(shù)據(jù)進(jìn)行處理分析,得到測試評估結(jié)果。目前僅對動(dòng)態(tài)性能、相位噪聲、通道間時(shí)延一致性以及靜態(tài)定位精度等關(guān)鍵指標(biāo)作了測試,測試結(jié)果滿足理論預(yù)期和指標(biāo)范圍及精度要求,后期將基于軟件接收機(jī)對模擬器的其它性能指標(biāo)項(xiàng)作測試。
[1] 馮富元. GPS 信號模擬源及測試技術(shù)研究和實(shí)現(xiàn)[D]. 北京: 北京郵電大學(xué), 2009.
[2] 寇艷紅, 張海濤. 基于 PXIe 總線的多 GNSS 射頻信號模擬器驗(yàn)證測試[A]. 第二屆中國衛(wèi)星導(dǎo)航學(xué)術(shù)年會電子文集[C]. 2011.
[3] 湯震武. 衛(wèi)星導(dǎo)航信號模擬源關(guān)鍵指標(biāo)測量校準(zhǔn)及溯源方法研究[D]. 長沙:中南大學(xué), 2013.
[4] 謝 鋼. GPS 原理與接收機(jī)設(shè)計(jì)[M]. 北京:電子工業(yè)出版社, 2009.
[5] 孫友禮, 陳紫強(qiáng), 紀(jì)元法, 等. 基于三階 DDS 的高動(dòng)態(tài)衛(wèi)星信號多普勒模擬方法[J]. 桂林電子科技大學(xué)學(xué)報(bào), 2013, 33(6): 443-446.
[6] 董喜艷. 導(dǎo)航系統(tǒng)中相位噪聲模型建立與分析[D]. 成都:電子科技大學(xué), 2012.
[7] 李 鵬, 米 紅, 鄭晉軍, 等. 導(dǎo)航信號相位噪聲指標(biāo)分析[A]. 第二屆中國衛(wèi)星導(dǎo)航學(xué)術(shù)年會電子文集[C]. 2011.
Test of GNSS Simulator Performance Indicators Based on Software Receiver
Ou Guobiao, Lu Hui
(School of Electronic Information and Engineering, Beihang University, Beijing 100191, China)
For performance indicators test of GNSS simulator, this paper proposes a performance test architecture based on software receiver. Through the GNSS simulator performance analysis, including dynamic performance, phase noise, inter-channel delay consistency and static positioning accuracy, this paper gives the corresponding test methods and test procedures, and test results obtained with the actual data from GNSS simulator of each index. The test results show that the software receiver can effectively test the performance of GNSS simulator, which is in line with theoretical expectations, and meet the needs of testing and evaluation of GNSS simulator.
GNSS Simulator; performance indicators; software receiver
2016-09-20;
2016-11-02。
歐國標(biāo)(1991-),男,福建莆田人,碩士研究生,主要從事衛(wèi)星導(dǎo)航信號模擬器方向的研究。
路 輝(1977-),女,黑龍江肇東人,教授,碩士研究生導(dǎo)師,主要從事信息系統(tǒng)模擬、測試、優(yōu)化與評估方向的研究。
1671-4598(2017)03-0006-05
10.16526/j.cnki.11-4762/tp.2017.03.003
TP302.7
A
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06