書畫手臂的模型設計
2017-03-28 07:56:48陳鵬韓博張俊博
山東工業技術 2017年4期
關鍵詞:機械臂
陳鵬+韓博+張俊博

摘 要:機械臂廣泛的應用在工業領域,其形式多種多樣,采用DARM函數算法、Melzi控制板控制的書畫手臂,在生活中能夠廣泛應用,而且具有著結構簡單、控制精確、方便簡捷、實用性較高等優點。通過對現有的各種機械臂的介紹分析,明確書畫手臂的優缺點,為進一步的改進與完善提供方法和途徑。
關鍵詞:機械臂;DARM;對比分析
DOI:10.16640/j.cnki.37-1222/t.2017.04.249
0 引言
工業機器人的快速發展實現了生產自動化,提高了生產效率。在工程機械、車間廠房、高危作業、產品生產線、汽車零部件等行業機器人都得到了應用,并且經濟效益、發展前景都十分可觀。伴隨著工業機器人的飛速發展,研究的不斷深入,機器人產品向高精度、高智能、可控性強和高性能方向發展。人們希望這種機器人也能走進我們的日常生活中來,于是服務型的機器人逐漸走進了我們的視野,因此也便有了低成本的、小型的、所謂的“桌面版”機械臂的產品。桌面版的機械臂雖不如工業版的具有力量大、精度高、速度快的特點,但在日常生活中,具有寫字、畫畫、拾物等功能,簡單方便,增加了趣味性的同時,又可學習到知識。以所研究的書畫手臂為例,進行介紹分析,明確其優點與不足,為以后的發展與應用奠定基礎。
1 桌面機械臂的發展情況
1.1 uArm
uArm是一個連桿式的機械臂,它的控制部分采用了便于編程控制的開源硬件Arduino,。其最大的特點是底部轉盤,所有動力裝置都裝在這個地方以減少機械臂部分的重量,從而減少慣性動作對穩定性的影響,同時也能增加機械臂的負載能力以提高效力。
在功能上也與Leapmotion合作,玩家可以通過手勢操作機械臂,比如操控吸盤吸附非規則物體或者用機械手操控規則物體。在Processing后臺,玩家也可以對Leapmotion所開放的接口編程,把uArm變成你定制化的機械臂。
1.2 7bot
7bot機械臂其主要原型為ABB工業機械臂IRB2400,硬件結構方面,7BotArm采用了6軸、全金屬設計,不僅更加牢固耐用,而且還可以在3維空間做更多操控。其另外一個特點是采用了定制舵機方案,可以設定舵機的輸出力矩大小和運行速度,確保精度,還可以采用數字I2C總線接口,僅用四根線就可以串聯127個舵機。
7BotArm提供了多種控制方式,包括手勢、網頁控制、結合計算機視覺等實現智能控制,可以覆蓋不同人群的不同需求。具體來說:
(1)增加了機器人視覺功能,可以完成打地鼠游戲、陪人下棋等諸多智能應用。
(2)增加了軟件仿真環境,模型可以和現實機器人一一對應,也可以在軟件環境中規劃好路徑然后下載到實際環境中去復現。
(3)增加了示教功能,用戶可以直接拖動機械臂進行軌跡規劃,然后記錄回放,在不需要任何編程的情況下就可以控制機械臂運動。
1.3 Dobot
DOBOT機械臂,號稱是全球首款高精度消費級桌面機械臂,在能夠完成多種機械臂動作的基礎上,具有價格低廉的特點,同樣是基于開源硬件Arduino控制的機構,其精度為0.2mm。
DOBOT機械臂可以3d打印、寫字、畫畫,他的另一個強大功能就是腦電波讀取。使用者將傳感器戴在頭上,集中注意力,例如給出一個向左的信號,并記錄為向左的動作,下次再遇到這個腦電波信號,它就會給出向左的動作等。
2 書畫手臂的模型設計
2.1 結構簡介
書畫手臂由一個基座、一個末端執行器、六根金屬連桿和電動軸樞,以及同步輪和同步帶組成,這樣的機械臂可以在其活動范圍內實現任意的三維位置和位姿。每一個活動的關節稱為一個自由度,共有3個關節,即為3自由度機械臂。機構運行時,由Melzi控制板控制三個電動機的工作,從而控制執行端在X、Y、Z三個方向的移動來進行寫字畫畫
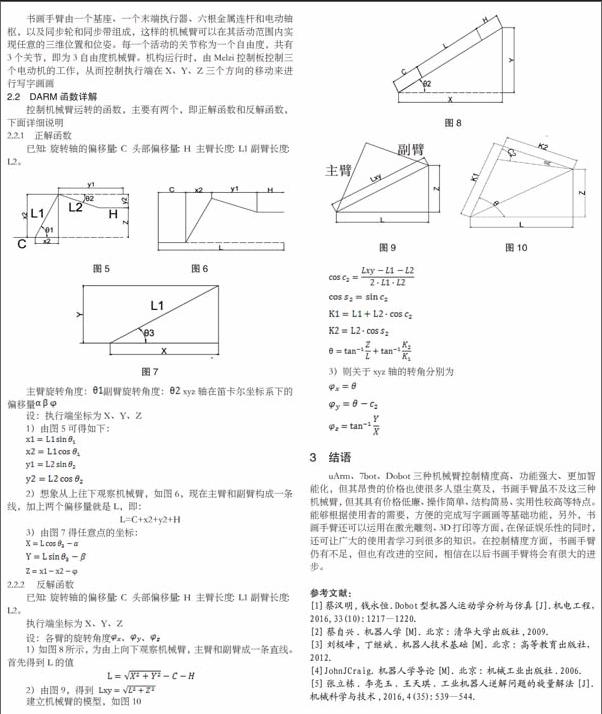
2.2 DARM函數詳解
控制機械臂運轉的函數,主要有兩個,即正解函數和反解函數,下面詳細說明
2.2.1 正解函數
3 結語
uArm、7bot、Dobot三種機械臂控制精度高、功能強大、更加智能化,但其昂貴的價格也使很多人望塵莫及,書畫手臂雖不及這三種機械臂,但其具有價格低廉、操作簡單、結構簡易、實用性較高等特點。能夠根據使用者的需要,方便的完成寫字畫畫等基礎功能,另外,書畫手臂還可以運用在激光雕刻、3D打印等方面,在保證娛樂性的同時,還可讓廣大的使用者學習到很多的知識。在控制精度方面,書畫手臂仍有不足,但也有改進的空間,相信在以后書畫手臂將會有很大的進步。
參考文獻:
[1]蔡漢明,錢永恒.Dobot型機器人運動學分析與仿真[J].機電工程,2016,33(10):1217—1220.
[2]蔡自興.機器人學[M].北京:清華大學出版社,2009.
[3]劉極峰,丁繼斌.機器人技術基礎[M].北京:高等教育出版社,2012.
[4]JohnJCraig.機器人學導論[M].北京:機械工業出版社.2006.
[5]張立棟.李亮玉.王天琪.工業機器人逆解問題的旋量解法[J].機械科學與技術,2016,4(35):539—544.
猜你喜歡
山東工業技術(2017年9期)2017-05-16 00:30:11
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
