多衛星系統融合精密單點定位性能分析
2017-03-30 08:50:59張顯云鮑新雪劉芳誠
測繪工程 2017年6期
楊 松,張顯云,杜 寧,鮑新雪,劉芳誠
(貴州大學 礦業學院,貴州 貴陽 550025)
多衛星系統融合精密單點定位性能分析
楊 松,張顯云,杜 寧,鮑新雪,劉芳誠
(貴州大學 礦業學院,貴州 貴陽 550025)
隨著全球四大衛星導航系統格局的成型,衛星定位系統已從單系統模式發展為如今多系統、多頻率融合定位、交互操作的模式。在分析多系統精密單點定位模型及各誤差項處理策略的基礎上,利用RTKLIB進行GPS,GLONASS,GALILEO,BDS多系統融合精密單點定位試驗,并分析其動/靜態定位性能。實驗結果表明:在單系統空間幾何構型較差的情況下,多系統融合精密單點定位較單GPS定位精度可提高20%~40%,收斂時間可縮短35%~50%;在截止高度角超過40°的情況下,單系統會因可見衛星數量不足而無法完成連續定位,而多系統仍能實現高精度的連續定位。這在城區、山區或衛星遮蔽較嚴重的不利環境中有重要的利用價值。
多系統融合;精密單點定位;定位精度;收斂速度;高度角
精密單點定位PPP (Precise Point Positioning,PPP)由于僅需一臺接收機便可以實現高精度定位,在衛星定軌、高精度坐標框架維持、區域或全球性科學考察、航空動態測量、海洋測繪等方面具有廣闊的應用前景[1]。然而,基于單衛星系統的PPP存在收斂時間較長、在山區或城區等復雜觀測環境下由于可視衛星數的限制,無法獲取高精度定位結果等缺陷,從而限制了PPP技術在某些領域的應用[2]。近年來,導航衛星系統呈現出多模多頻的發展格局,PPP用戶即使在復雜的觀測環境下也可獲得更多觀測值和較好的衛星空間幾何構型[3],從而有助于改善PPP定位的實效性、可靠性及定位精度。因此,融合多衛星系統的PPP技術已成為目前GNSS精密單點定位技術的研究熱點。
近年來,國內外學者對多系統融合PPP定位進行諸多研究并取得成果[4-8]。然而,目前融合PPP的研究主要局限于GPS/GLONASS、GPS/BDS雙系統組合定位,而基于GPS/GLONASS/GALILEO/BDS四大衛星系統的融合PPP研究較少。本文在研究多系統融合精密單點定位模型及其相關誤差項處理策略的基礎上,基于日本開源RTKLIB軟件[9]和IGS跟蹤站觀測數據,對單系統、雙系統組合、多系統融合PPP的動/靜態定位精度、收斂速度進行比較分析,并在不同高度角閾值下對動態PPP進行仿真。
1 多衛星系統精密單點定位模型
1.1 觀測方程
為消除電離層延遲的影響,在單系統PPP大多采取無電離層延遲組合觀測值,其觀測方程為[10]
(1)

在式(1)的基礎上,引入系統間偏差參數,得到多系統融合精密單點定位觀測方程為[11]
(2)

1.2 參數估計及誤差處理策略
觀測方程中待估參數X包括接收機位置、接收機鐘差、天頂對流層延遲、系統偏差等,如式(3)所示[11]。
(3)
多系統融合PPP各誤差項和待估參數的處理方法與GPS PPP相似,估計方法為擴展卡爾曼濾波[12]。其中接收機位置參數(x,y,z)由動態和靜態處理得到;δtISB是ISB引起的時間延遲,它和模糊度一樣作為常量進行估計;接收機鐘差等當作白噪聲進行處理;對流層延遲干分量采用Sasstamonion模型進行改正,殘余濕分量采取隨機游走法估計[13]。在測量更新過程中利用觀測信息求解狀態向量及其方差協方差[14]。數據處理必備的多系統精密星歷和精密鐘差等產品均在全球多系統定位服務實驗網(The Multi-GNSS Experiment,MGEX)下載獲取。衛星端和接收機端天線相位中心偏移(PCO)和天線相位中心變化(PCV)使用IGS提供的ANTEX文件改正[15-16],但是由于目前IGS只提供粗略的BDS衛星端PCO改正,尚無機構或組織提供BDS衛星端PCV以及接收機端的PCO與PCV信息,因此無法進行精確的PCO及PCV改正[4]。詳細的數據處理策略如表1所示。
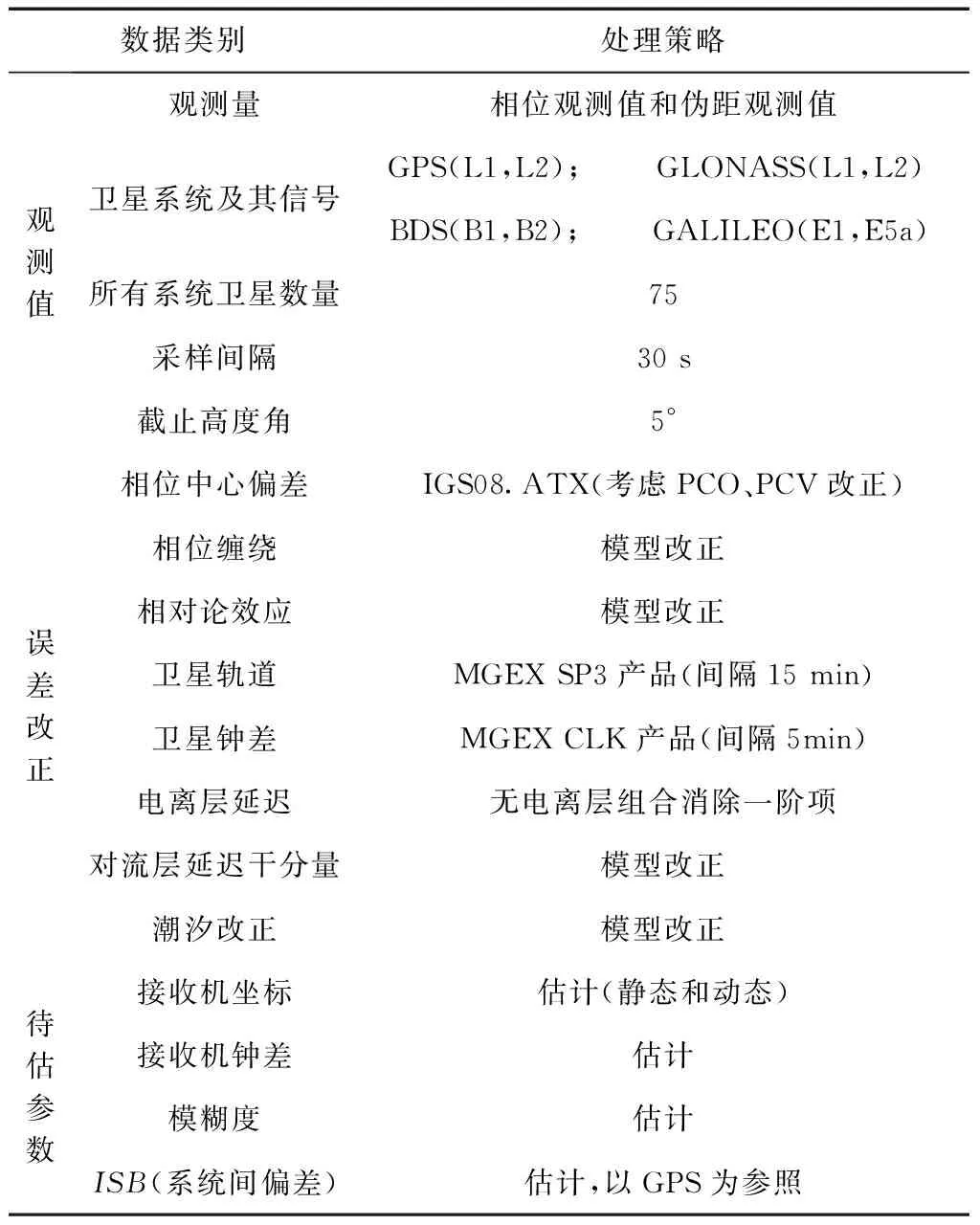
表1 參數估計及誤差處理策略
2 多衛星系統融合精密單點定位性能分析
2.1 靜態定位分析
本文選取MGEX平臺下多個測站2016年2月1日~7日DOY032~038共7 d的觀測數據分別進行靜態和動態PPP試驗,數據采樣率為30 s。分別對單系統(以GPS,BDS為例,簡寫為G,C)、雙系統(以GPS+GLONASS,GPS+BDS為例,簡寫為G/R,G/C)和多系統(GPS+GLONASS+GALILEO+BDS,簡寫為GREC)3種方案在動態定位和靜態定位模式下的定位精度、收斂速度以及不同高度截止角下動態定位性能進行分析,將定位結果與IGS提供的站坐標(參考真值)進行比較,評價各測站定位結果的外符合精度[17-18],并分析其收斂時間,對其偏差進行RMS統計,由此可得定位結果在X,Y,H(東、北、高程)方向隨時間變化的精度和收斂特性,圖1是測站BRUN和GMSD的收斂情況。
由圖1可以看出BDS的收斂速度最慢,需要約1 h才能達到0.1 m的精度,原因是其衛星數量不足,有些測站如GMSD甚至無法完成連續高精度PPP定位;由于GPS較BDS有更多可視衛星,可獲得較好的衛星幾何構型,因此在30 min左右便能收斂到0.05 m;GREC組合定位的收斂速度最快,15 min在X,Y,H 3個方向均能收斂到0.03 m以內,這是因為多系統融合可視衛星更多,衛星空間幾何構型較優[19]。
圖2是測站EUSM在不同時間尺度的定位精度RMS統計結果。從圖2可以看出,多系統組合在很短時間內便能達到較高的定位精度,15 min靜態解X,Y,H 3個方向RMS為0.13 m,0.16 m,0.11 m; 而30 min分鐘靜態解均能達到0.1 m,而單GPS和雙系統組合要達到同樣的精度則需要1h左右。12 h靜態解GREC在X,Y,H 3個方向均能收斂到0.03 m內,而單GPS,G/R組合和G/C組合的X方向仍處于0.05 m左右,Y,H方向可達0.04 m,但仍不及GREC。經過24 h的多系統融合靜態觀測,GREC組合X,Y,H方向的精度較GPS分別提升25%,58%,73%,H方向改善更為顯著。雙系統組合GPS/GLONASS與GPS/BDS的收斂速度和定位精度較單GPS略有提升,但由于BDS衛星在X方向定位效果較差,導致G/C的X結果反而不如GPS。需要說明的是由于GALILEO可供觀測的可視星較少,而單GLONASS和單BDS的收斂效果均不佳,所以未給出其統計結果。
2.2 動態定位分析
為了分析動態PPP的定位性能,采用相同的試驗數據和數據處理策略對各測站進行動態PPP定位,并對其結果進行RMS統計。表2給出2月7日ANMG,CUT0,EUSM,NNOR 4個站在BDS,GPS,G/C,G/R,GREC 5種方案下X,Y,H方向單天動態定位誤差的RMS統計值。
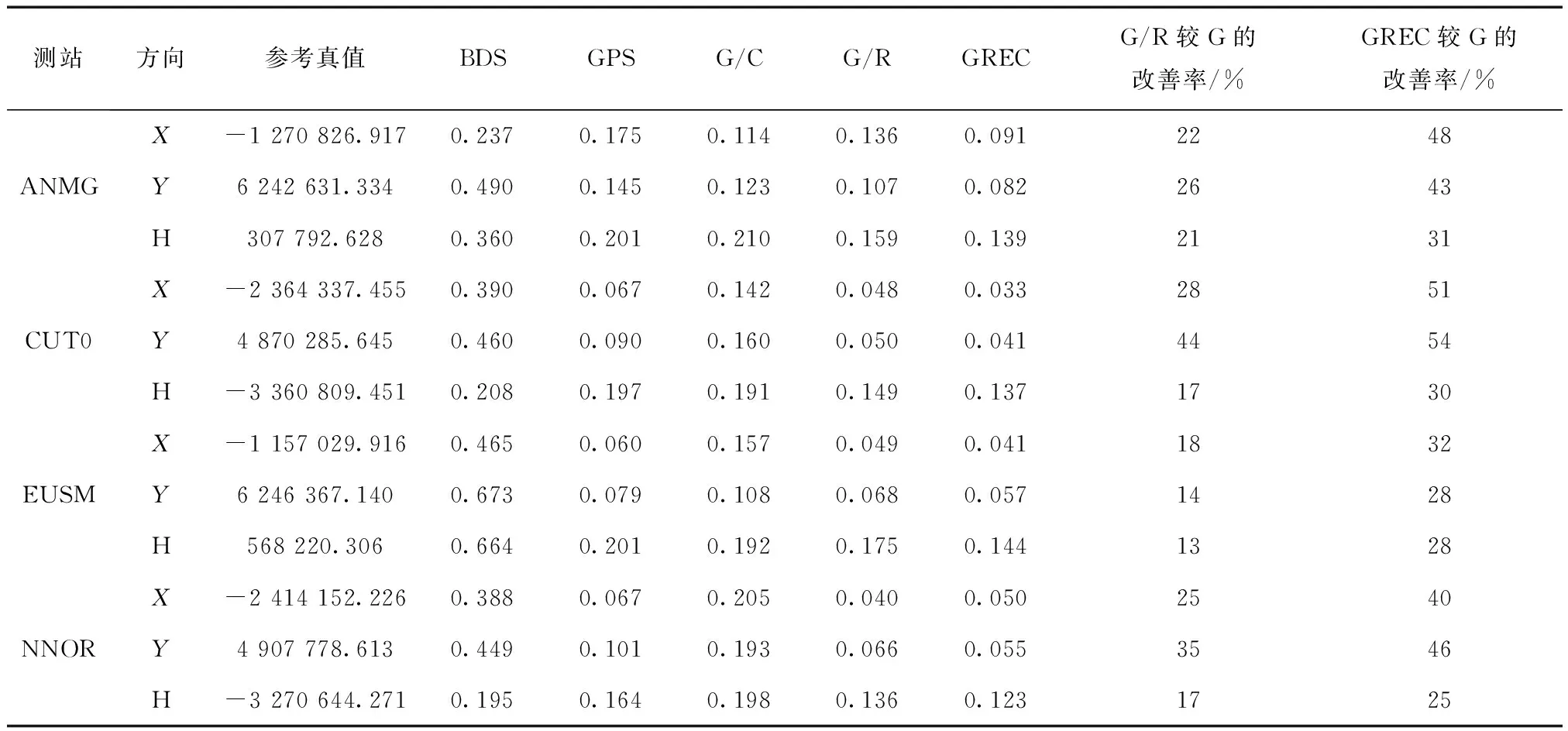
表2 動態精密單點定位RMS統計 m
由表2可知,雙系統、多系統組合PPP定位精度明顯優于單系統。對于BDS,其X,Y,H 3方向RMS平均值分別為0.370 m,0.518 m,0.357 m,表明北斗系統動態定位效果不理想,這是因為目前北斗的精密衛星產品精度不高,且無法精確改正PCO和PCV誤差[4]。GPS定位精度大多保持在0.1 m左右,隨著GLONASS衛星的加入,G/R組合X,Y方向精度顯著提高,平均改善率為27%和25%,但在H方向改善有限,僅為17%。由于BDS自身定位精度偏低,G/C組合總體定位效果不如G/R組合,G/R組合對于優化GPS的貢獻更大。從表2還可以發現,GREC組合的平均精度可達0.054 m,0.059 m,0.136 m,雖然在H方向精度不高但相比G卻有很大提升,平均改善率可達29%。上述分析表明多系統PPP能夠獲得比單系統更高的定位精度。
圖3給出POTS站不同高度截止角設置下(從左至右分別為10°,25°,40°)Multi-GNSS(GREC)與Single-GNSS(以GPS為例)于DOY038(2月7日)的定位結果,HDOP,VDOP和衛星數,圖3中(a)、(b)、(c)分別是X,Y,H方向的定位結果,(d)、(e)、(f)分別為HDOP(Horizontal Dilution Of Precision,水平精度衰減因子)、VDOP(Vertical Dilution Of Precision,垂直精度衰減因子)和衛星數。從圖3可以看出高度角變化對多系統影響甚小,而對單系統影響較大。當高度角達到40°時,多系統組合仍能取得一定精度的定位結果,其定位結果與單系統相比更趨平穩,HDOP和VDOP也能維持在相對穩定的水平。隨著高度角增大,Multi-GNSS的衛星數量也在減少但總能維持在7顆以上,而單系統衛星經削減后參與定位解算的衛星數量不足甚至沒有可見衛星(從e圖可見,當高度角40°時,該天19:00以后未能觀測到GPS衛星),多系統組合定位的精度和穩定性優于單系統的原因正在于此。由此看出,當衛星高度角為40°時各方向的離散程度越來越差,此時多系統對定位精度的貢獻有限,但多系統組合與單系統相比仍能保持較大優勢。
3 結 論
基于GPS/GLONASS/GALILEO/BDS四大系統融合精密單點定位函數模型,通過RTKLIB解算結果分析多系統組合動/靜態PPP的定位性能。結果表明當單衛星系統幾何構型不理想時,多系統融合PPP總能保持較高精度、較快收斂速度、較強穩定性,例如GMSD站靜態GREC收斂時間為15 min,而GPS卻需要25 min,CUT0站的動態G/R組合較單GPS各方向的精度改善率只有28%,44%,17%,而GREC組合卻能達到51%,54%,30%,對H方向改善尤為明顯;在不同高度角條件下,單系統定位結果的各項指標均隨高度角的升高而快速下降,在40°時甚至無法完成連續定位,而多系統仍能保持較好的定位精度和收斂速度。多系統融合精密單點定位憑借更多的可視衛星,在復雜環境下仍能獲得較好的空間幾何構型,從而保證PPP的定位精度及收斂速度,這使其在城區、山區或衛星遮蔽比較嚴重的區域仍能極大地發揮優勢。
[1] 吳清波. 多系統衛星導航兼容接收機關鍵技術研究[D]. 長沙: 國防科學技術大學,2011.
[2] 于興旺. 多頻GNSS精密定位理論與方法研究[D]. 武漢: 武漢大學,2011.
[3] 張麗. GNSS接收機多系統兼容定位算法研究與實現[D]. 北京: 北京理工大學,2014.
[4] 張小紅,左翔,李盼,等. BDS/GPS精密單點定位收斂時間與定位精度的比較[J]. 測繪學報,2015,44(3):250-256.
[5] 蔡昌盛,匡翠林,戴吾蛟. GPS/GLONASS組合精密單點定位性能分析[J]. 測繪科學,2012,37(3):183-185.
[6] TEGEDOR J,OVSTEDAL O,VIGEN E. Precise orbit determination and point positioning using GPS,Glonass,Galileo and BeiDou[J]. Journal of Geodetic Science,2014,4(1):65-73.
[7] LI Xingxing,GE Maorong,DAI Xiaolei,et al. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS,GLONASS,BeiDou,and Galileo[J]. Journal of Geodesy Science,2015,89(6):607-635.
[8] 李鶴峰,黨亞民,秘金鐘,等. BDS與GPS、GLONASS多模融合導航定位時空統一[J]. 大地測量與地球動力學,2013,33(4):73-78.
[9] TOKYO UNIVERSITY OF MARINE SCIENCE AND TECHNOLOGY. RTKLIB ver. 2.4.2 manual[OL]. (2013-04-29). http://www.rtklib.com.
[10] 邱中軍,陳景平,房穎,等. 精密單點定位及其精度分析[J]. 測繪工程,2011,20(6):35-37.
[11] WANG Fuhong,CHEN Xinghan,GUO Fei. GPS/GLONASS Combined Precise Point Positioning with Receiver Clock Modeling [J]. Sensors 2015, 15(7):78-93.
[12] 張勇,田林亞,馬丙浩,等. 卡爾曼濾波在GPS精密單點定位中的應用研究[J]. 測繪通報,2013(7):8-11.
[13] 張建龍,徐愛功,張兆南,等. RTKLIB軟件靜態精密單點定位精度測試與分析[J]. 全球定位系統,2014,39(1):37-41.
[14] 任曉東,張柯柯,李星星,等. BeiDou、Galileo、GLONASS、GPS多系統融合精密單點[J]. 測繪學報,2015,44(12):1307-1313.
[15] 張帆.基于相對電離層延遲模型的單頻GPS精密單點定位算法研究[J].測繪與空間地理信息,2016,39(5):122-124,128.
[16] 丁慧君,羅端,盧兵. 基于RTKLIB的精密單點定位研究[J]. 城市勘測,2014(5):22-25.
[17] 石鵬卿. GPS精密單點定位收斂時間的影響因素研究與分析[D].西安:長安大學,2013:31-53.
[18] 王曉波,錢楓,金麗華.“北斗二號”導航定位系統與GPS偽距單點定位性能對比研究[J].測繪與空間地理信息,2016,39(2):97-99,103.
[19] 孫洪瑞,沈云中,周澤波. GPS/GLONASS組合點定位模型及其精度分析[J]. 測繪工程,2009,18(1):8-10.
[責任編輯:張德福]
Analysis of positioning performance on Multi-GNSS integration precise point positioning
YANG Song, ZHANG Xianyun, DU Ning, BAO Xinxue, LIU Fangcheng
(Mining College, Guizhou University, Guiyang 550025, China)
With the formation of four global satellite navigation systems,the satellite positioning system has developed from a single model in the past to today's integration positioning mode of multi system, multi frequency, by operation of interaction.On the basis of studying the model of multi-system PPP and the processing strategy of its error term, an experiment on precise point positioning which integrates the four major satellite navigation systems of GPS,GLONASS,GALILEO,BDS is conducted through RTKLIB and its positioning performance in kinematic/static mode is discussed. The results show that, under the condition that the single system with poor geometrical configuration, positioning accuracy of multi-system PPP can be improved by 20%~40% than that of single GPS PPP, and convergence time can be shortened by 35%~50%. Besides, in the case that elevation angle exceeds 40 degrees, single GPS fails to realize continuous positioning due to insufficient number of visible satellites, and simultaneously the multi-system can achieve continuous positioning with relatively high accuracy. This has important value in the city, mountain or the adverse area where shelter is more serious.
multi-system integration;PPP;positioning accuracy;convergence rate;elevation angle
引用著錄:楊松,張顯云,杜寧,等.多衛星系統融合精密單點定位性能分析[J].測繪工程,2017,26(6):24-29.
10.19349/j.cnki.issn1006-7949.2017.06.005
2016-05-12
貴州省科技廳聯合資金項目(黔科合LH字[2014]7646,黔科合LH字[2014]7649);貴州大學研究生重點課程建設項目(貴大研ZDKC[2015]029);貴州省工業公關項目(黔科合GY字(2011)3054);貴州大學測繪科學與技術研究生創新實踐基地建設項目(貴大研CXJD[2014]002])
楊 松(1992-),男,碩士研究生.
張顯云(1974-),男,副教授,碩士生導師.
P228
A
1006-7949(2017)06-0024-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
計算機應用(2021年4期)2021-04-20 14:06:36
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
現代出版(2020年3期)2020-06-20 07:10:34