Brunovsky型高階非線性多智能體系統一致性控制研究
2017-04-01 00:02:11黃輝
現代電子技術 2017年5期
黃輝

摘 要: 已有的多智能體系統一致性控制研究大多局限于個體動態為一階積分器和二階積分器的分析和綜合。然而現有理論成果所采用的低階線性化模型過于簡單,導致多智能體理論研究與實際應用脫節。以高階非線性多智能體系統一致性控制為主線,考慮含有未建模動態和有界未知擾動的高階非線性多智能體一致性控制問題。由于未建模動態的非線性函數滿足Lipschitz條件,利用模糊邏輯系統逼近器估計系統未建模動態,結合分布式自適應控制處理逼近器中的未知參數調節問題,將未建模動態的逼近誤差當做一類擾動與外部擾動共同用魯棒控制方法處理,設計分布式魯棒控制器。
關鍵詞: 多智能體系統; 高階; 非線性系統; 一致性; Backstepping; 自適應魯棒
中圖分類號: TN911?34; TM417 文獻標識碼: A 文章編號: 1004?373X(2017)05?0105?04
Abstract: The study on consistency control of the multi?agent system is mostly limited to the analysis and synthesis of dynamic first?order integrator and second?order integrator. However, the lower?order linear model adopted by the existing theoretical results is too simple, and leads to the disjoint of the theoretical research and practical application of multi?agent system. Taking the consistency control of high?order nonlinear multi?agent system as the main line, the consistency control problem of the high?order nonlinear multi?agent system including unmodeled dynamics and bounded unknown disturbance is considered. Since the unmodeled dynamic nonlinear function satisfies the Lipschitz condition, the approximator of fuzzy logic system is used to estimate the unmodeled dynamic system. In combination with the unknown parameter adjustment problem in approximator processed with the distributed adaptive control, the approximation error of the unmodeled dynamics are treated as a class disturbance and external disturbance processed with the robust control method. The distributed robust controller was designed.
Keywords: multi?agent system; high order; nonlinear system; consistency; Backstepping; adaptive robust
0 引 言
為了解決許多實際系統中同時存在未知參數和有界不確定的問題,提高分布式控制器對更復雜非線性動態的魯棒性和抗擾性,進一步研究一類含有外部干擾和未建模動態的高階非線性多智能體系統的分布式模糊自適應控制和魯棒控制問題。利用模糊邏輯系統的萬能逼近性質對智能體的未知非線性部分進行估計,并對估計參數設計對應的分布式自適應律,把對未建模動態的控制問題轉化成對未知參數的自適應調節問題[1]。由于存在逼近誤差,且逼近誤差和外部擾動具有不確定性特點,將根據逼近誤差上界和擾動上界的假設條件,設計合理的控制增益,采用魯棒控制方法對逼近誤差和外界擾動一并進行處理,消除模糊邏輯系統的逼近誤差和外部擾動對系統的不利影響,有效解決Brunovsky型高階非線性智能體系統的一致性控制問題[2]。
1 問題描述
一類柔性機械臂可以采用四階非線性動力學系統來建模,甚至一隊無人機的編隊控制問題,從本質上可視為高階多智能系統的協同控制問題;特別是在飛行器進行戰術機動時,需保持加速度等高階狀態一致,同樣表現出較為明顯的高階特性[3]。然而,由于測量不精確性以及復雜環境的影響,具有不確定特性和外部擾動的網絡化非線性多智能體系統的控制問題變得越來越復雜。對于這類復雜的非線性動力學系統,可采用線性化方法得到Brunovsky標準形。在模型轉變過程中,未建模動態和干擾體現在動力學模型中的不確定光滑非線性函數和外部擾動兩個非線性項[4]。
以典型的柔性機械臂模型為例,其動力學模型可寫成如下形式:
假設2:多智能體系統的網絡拓撲[G]是固定連通拓撲。
控制目標是在假設1和2的前提下利用多智能體系統的局部狀態信息設計分布式控制器,使多智能體系統中的每個個體最終能夠漸近地實現狀態一致。
2 分布式控制器設計
2.1 基于鄰居信息的分布式虛擬控制器設計
多智能體系統是嚴格反饋形式,由于下三角的結構形式,每個微分方程的更高階狀態可以看做是虛擬控制[6]。基于這樣的思路,可以將高階多智能體一致性控制問題轉化成一系列低階智能體系統的一致性問題[7]。
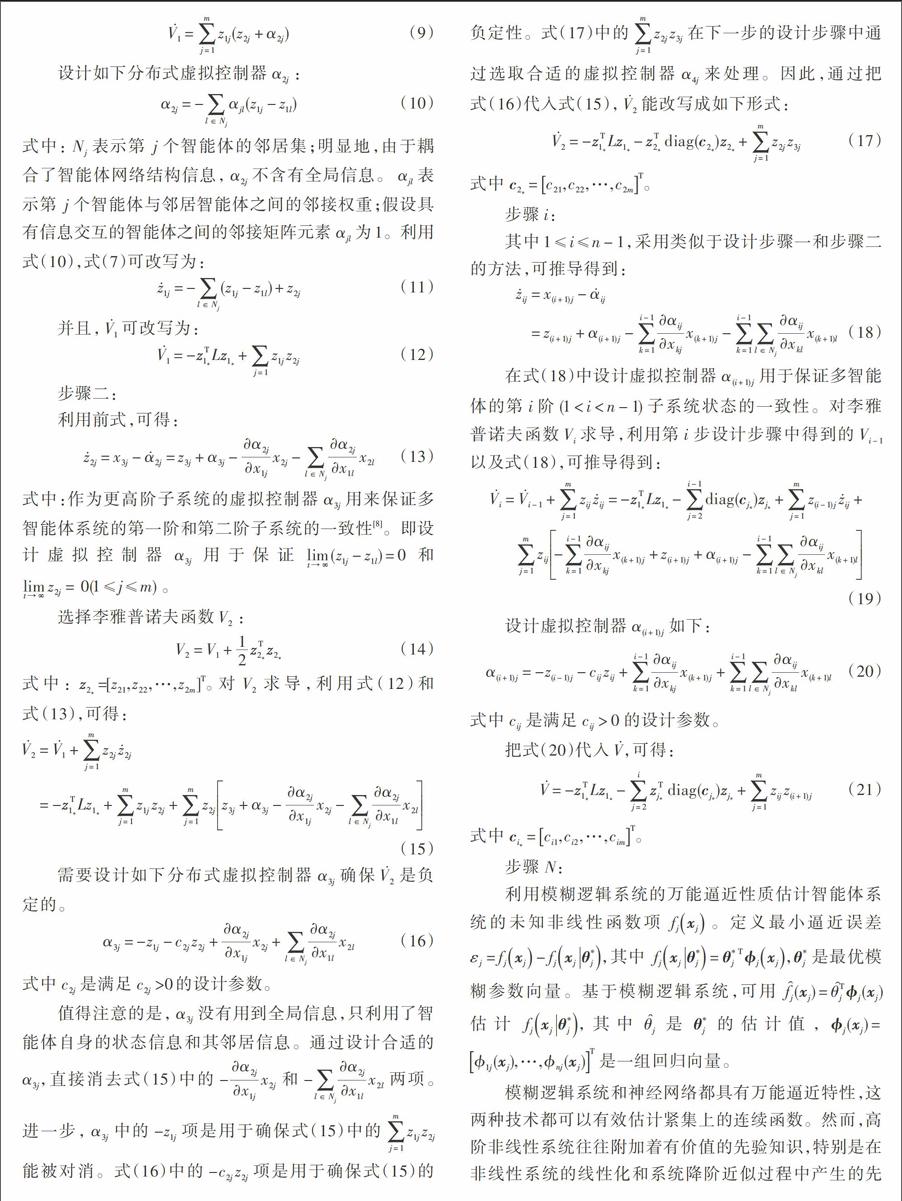
利用模糊邏輯系統的萬能逼近性質估計智能體系統的未知非線性函數項[fjxj]。定義最小逼近誤差[εj=fjxj-fjxjθ?j,]其中[fjxjθ?j=θ?Tj?jxj,][θ?j]是最優模糊參數向量。基于模糊邏輯系統,可用[fj(xj)=θTj?j(xj)]估計[fjxjθ?j,]其中[θj]是[θ?j]的估計值,[?j(xj)=][?1j(xj),…,?nj(xj)T]是一組回歸向量。
模糊邏輯系統和神經網絡都具有萬能逼近特性,這兩種技術都可以有效估計緊集上的連續函數。然而,高階非線性系統往往附加著有價值的先驗知識,特別是在非線性系統的線性化和系統降階近似過程中產生的先驗知識。因此,模糊邏輯系統方法相比于神經網絡方法能夠更充分利用先驗知識。模糊邏輯系統的訓練由常識性的規則庫完成,神經網絡控制需要更多訓練,需要更大的計算量。
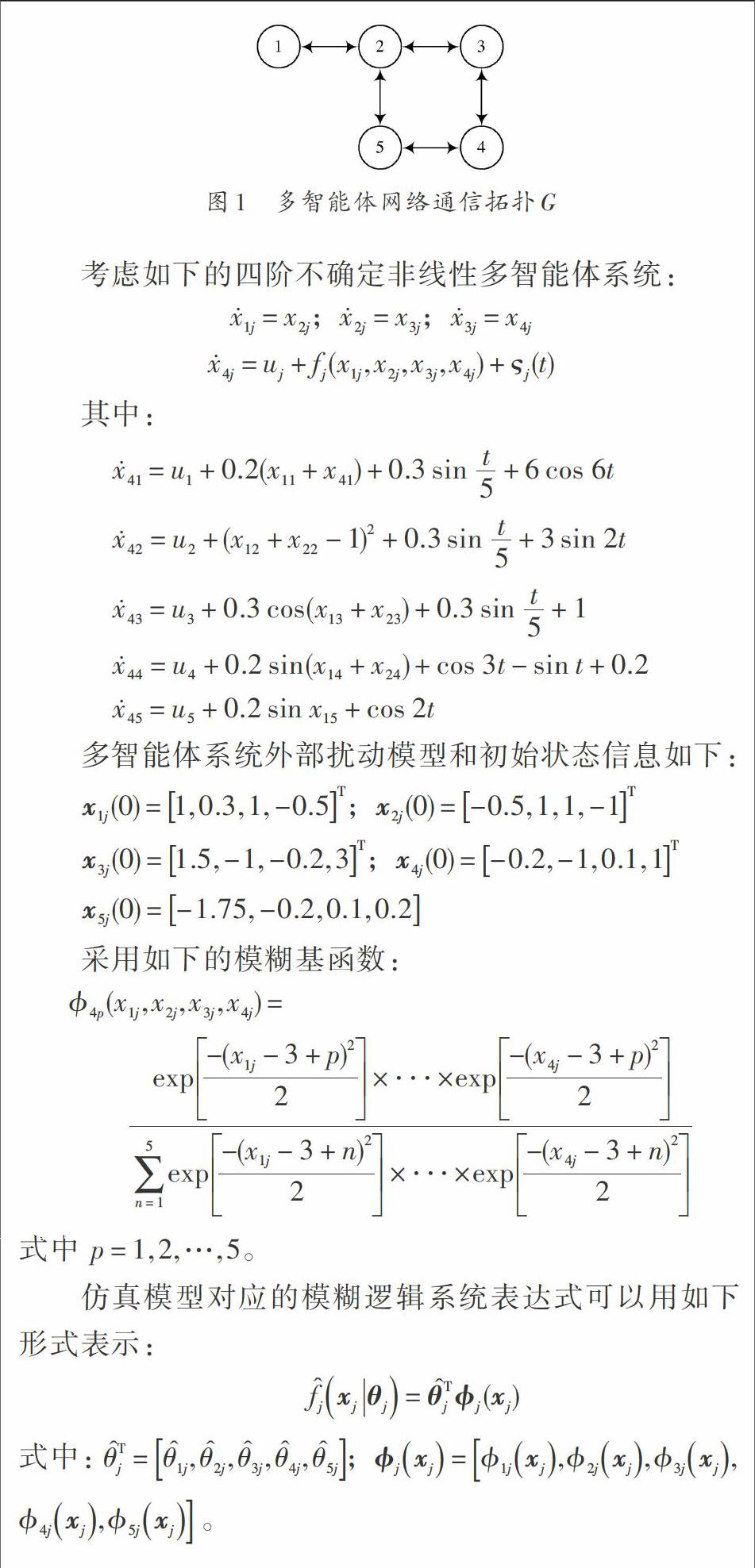
3 數值仿真
考慮如圖1所示的含有五個節點的無向網絡拓撲G。動力學模型滿足假設1,通信拓撲G滿足假設2。為了簡化仿真設計,假設非線性網絡中互相有通信的節點之間的鄰接權重為1,相互間無通信的節點其鄰接權重為0。
4 結 論
基于分布式Backstepping設計框架,本文提出了基于自適應模糊控制、魯棒控制的分布式控制器,解決了未建模動態逼近誤差上界已知情況下的一致性控制問題。利用模糊邏輯系統的萬能逼近性質,每個智能體的未知非線性部分可采用模糊邏輯系統進行估計,并用自適應控制實時調節逼近器的線性化參數。由于存在逼近誤差,通過設計合理的魯棒補償項可有效消除逼近誤差和外界不確定因素的影響,提高系統的魯棒性能。通過調整控制增益,理論上可以使得跟蹤誤差達到任意精度。本文研究的控制策略僅用到了智能體與其鄰居智能體之間的局部狀態信息,有效地解決了Brunovsky型高階非線性智能體系統的一致性控制問題。
參考文獻
[1] ZAVLANOS M M, PAPPAS G J. Potential fields for maintaining connectivity of mobile networks [J]. IEEE transactions on robo?tics, 2007, 23(4): 812?816.
[2] MENG J, EGERSTEDT M. Distributed coordination control of multi?agent systems while preserving connectedness [J]. IEEE transactions on robotics, 2007, 23(4): 693?703.
[3] SCHURESKO M, CORT?S J. Distributed motion constraints for algebraic connectivity of robotic networks [J]. Journal of intelligent and robotic systems, 2009, 56(1): 99?126.
[4] HUO B, TONG S, LI Y. Adaptive fuzzy fault?tolerant output feedback control of uncertain nonlinear systems with actuator faults [J]. International journal of systems science, 2013, 44(12): 2365?2376.
[5] TONG S C, HE X L, ZHANG H G. A combined backstepping and small?gain approach to robust adaptive fuzzy output feedback control [J]. IEEE transactions on fuzzy systems, 2009, 17(5): 1059?1069.
[6] TONG S, LI Y. Adaptive fuzzy output feedback tracking backstepping control of strict?feedback nonlinear systems with unknown dead zones [J]. IEEE transactions on fuzzy systems, 2012, 20(1): 168?180.
[7] ZOU A M, HOU Z G, TAN M. Adaptive control of a class of nonlinear pure?feedback systems using fuzzy backstepping approach [J]. IEEE transactions on fuzzy systems, 2008, 16(4): 886?897.
[8] TONG S C, LI Y M. Observer?based adaptive fuzzy backstepping control of uncertain nonlinear pure?feedback systems [J]. Science in China: information sciences, 2014, 57(1): 1?14.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
