液壓挖掘機工作裝置整體有限元分析
2017-04-08 06:46:47盛亞君李申李欣裴朋超任雪嬌
山東交通學院學報 2017年1期
盛亞君,李申,李欣,裴朋超,任雪嬌
(長安大學道路施工技術與裝備教育部重點實驗室,陜西西安 710064)
液壓挖掘機工作裝置整體有限元分析
盛亞君,李申,李欣,裴朋超,任雪嬌
(長安大學道路施工技術與裝備教育部重點實驗室,陜西西安 710064)
以某型挖掘機的工作裝置整體結構為研究對象,利用大型有限元分析軟件ANSYS對挖掘機工作裝置整體結構進行實體建模,采用接觸分析法模擬銷軸鉸接處,對挖掘機典型工況下的強度、變形進行非線性計算,得出工作裝置整體的應力云圖、位移云圖。分析結果表明:基于工作裝置整體的有限元計算方法能極大地降低因構件簡化帶來的計算誤差,減小連接處應力集中的影響,對工作裝置的優化具有指導意義,也可為后期的試驗測試、應變片位置的選取提供參考。
液壓挖掘機;工作裝置;實體模型;有限元分析
挖掘機的工作裝置是挖掘機的直接受力結構,其各方面的性能對挖掘機整機的工作性能、可靠性等方面有重要影響[1]。由于動臂、斗桿、鏟斗等部件都是不規則的箱型焊接結構,相對于其他方法,有限元法比較容易計算結構任意一點處的應力、變形等[2]。長期以來,大多數研究都是對液壓挖掘機工作裝置的關鍵構件,如動臂、斗桿、鏟斗等進行有限元分析,包括對各構件之間銷軸處的連接進行強度、剛度、模態分析等,且大多以板殼(shell)單元建立模型,其計算結果與實際情況往往有較大偏差,特別是銷軸處、鉸接孔處應力集中較顯著。本文從整體集成的角度,以某工作質量為21.5 t的反鏟液壓挖掘機的工作裝置和回轉平臺為研究對象,建立挖掘機工作裝置集成的實體有限元三維模型,并進行分析。
1 建模
1.1 液壓挖掘機典型工況
由于挖掘機的工作裝置作業速度較低,所以經常采用靜強度法對其結構進行強度分析,找出最大應力或最危險載荷。根據文獻[3-5]將挖掘機工作狀態分為7種典型的工況。
1)姿態1。動臂油缸全縮,動臂處于最低位置,斗齒尖處于最大挖掘深度位置。該姿態下,受到重力、側向力、切向力等作用,各構件受力較大。
2)姿態2。動臂液壓缸和斗桿液壓缸均處于最大作用力臂位置。斗桿與動臂的鉸點、鏟斗和斗桿的鉸點、斗齒尖3點共線,動臂和斗桿均受到較大的作用力。該姿態下可以校驗動臂和斗桿是否滿足強度要求。
3)姿態3。液壓缸均處于最大作用力臂的位置。整機的理論挖掘力處于最大值,且動臂和斗桿受力較大。
4)姿態4。動臂液壓缸全縮,斗桿液壓缸作用力臂最大。該工況下,動臂和斗桿受到較大力矩作用,結構易發生失效。
5)姿態5。動臂油缸全縮,動臂與斗桿的鉸點和鏟斗與斗桿的鉸點的連線垂直于地面,鏟斗位于發揮最大挖掘力的位置,動臂受力較大。該姿態下可以校驗動臂的變形和強度要求。
6)姿態6。動臂油缸全伸,斗桿油缸全縮,鏟斗向下且垂直于停機面,工作高度處于最大卸載高度,工作裝置只受重力作用。
7)姿態7。斗桿油缸全縮,動臂與回轉中心的鉸點、鏟斗與斗桿的鉸點、斗齒尖3點共線,且斗齒尖位于停機面上,挖掘機受到較大的沖擊力。該工況下需對挖掘機進行強度分析和動力學分析以計算其受力和沖擊。
1.2 建立有限元模型
該模型整體是由工作裝置的動臂、斗桿、鏟斗、搖臂、連桿、油缸以及回轉平臺組成[6-9],它們是挖掘機的直接受力結構。依據某液壓挖掘機的CAD圖,將其保存成IGES格式,導入ANSYS,在ANSYS建立各構件的三維實體模型,建模過程中,在不影響計算結果的情況下,為減少有限元計算量,去掉了螺紋孔、倒角、運輸吊耳等。動臂、斗桿、鏟斗等焊接處均按連續處理,其材料均按與母材相同處理[10-13]。采用三維實體solid186單元模擬各構件以及連接處的銷軸,油缸采用梁單元beam188模擬,通過設置截面面積、彈性模量、密度等參數模擬實際液壓油缸[14-17],銷軸處采用映射(sweep)劃分,其余網格采取自由劃分(free)的方法。
1.3 鉸接處理及添加約束與載荷
挖掘機工作裝置各構件通過銷軸相連,從而傳遞力和運動。整體分析時,對鉸接處采用接觸分析法,該方法是一種大變形非線性分析,能更好模擬運動中構件間的變形以及相互間的力和位移[18],與耦合自由度法相比能很好的削弱鉸接點附件的應力集中。液壓油缸與軸之間采用直接固結法(rigid region)模擬,約束UAYZ方向上的自由度即可[19-21]。
根據實際工況對模型的某些節點添加約束及載荷。添加約束時將回轉平臺看成是固定結構,載荷加在鏟斗斗齒的節點上。
2 試驗
不同工況下,挖掘機工作裝置所受載荷不同,因此,有限元分析結果有區別,本文主要對7種不同工況時工作裝置的強度進行有限元分析。
2.1 強度分析
以工況3為例,對工作裝置進行強度分析。該姿態下,整體模型共有1 221 056個實體單元,530個梁單元,78個接觸單元2 247 356個節點。工作裝置主要承受重力和挖掘機的作用。液壓缸均處于最大作用力臂的位置,且理論挖掘力處于最大。其有限元模型如圖1所示,圖2為工作裝置整體的應力云圖(圖2中單位為MPa)。
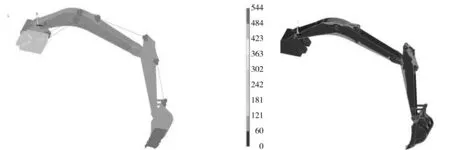
圖1 姿態3下工作裝置整體有限元模型 圖2 工作裝置整體應力云圖
從工作裝置整體應力云圖中提取出動臂和斗桿進行單獨分析,如圖3、4所示(圖中單位為MPa)。可得到動臂的最大應力為294 MPa,發生在耳板和動臂的焊接處,斗桿最大應力為315 MPa,在斗桿油缸與斗桿連接的鉸孔所在板邊緣處。由圖4可知,動臂的較大應力主要分布在箱內加強筋與上板的焊縫處、下翼緣板兩側的焊縫處以及下翼緣板與腹板的焊縫處。斗桿的較大應力主要分布在鏟斗油缸支座附近、上板前位置以及下翼緣板處,該姿態下斗桿上的應力較動臂大。

a)動臂 b)斗桿圖3 姿態3下應力云圖
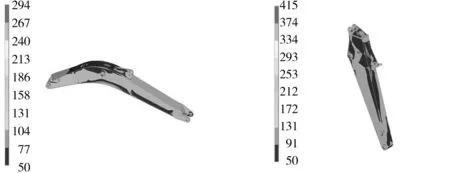
a)動臂 b)斗桿圖4 姿態3下應力較大處的云圖
圖5為其余各姿態下斗桿應力的應力云圖(圖中單位為MPa),比較可知,姿態3下斗桿應力最大。。

圖5 各姿態下斗桿的應力云圖
2.2 變形分析
挖掘機在不同的作業介質下工作,受到的挖掘力不同,當受到側向載荷作用時,工作裝置會發生變形。工作裝置受力情況有3種:切向力和自身重力載荷;側向力和自身載荷;切向力、側向力和自身載荷綜合作用。工作裝置在切向力、側向力和自身載荷作用時,在偏載情況下,工作裝置整體變形情況如圖6所示(圖中單位為mm)。

圖6 工作裝置整體的變形分布
以姿態2為例,對工作裝置進行整體變形分析。由圖6可知,最大變形發生在鏟斗處,為90.83 mm。從圖6的整體變形中取出動臂和斗桿分析,可得到動臂和斗桿的最大變形量和位置,如圖7、8所示(圖中單位為mm),動臂的最大變形量發生在動臂與斗桿連接的兩側板上,為34.04 mm。斗桿的最大變形量為67.18 mm,發生在動臂與鏟斗鉸接孔處。
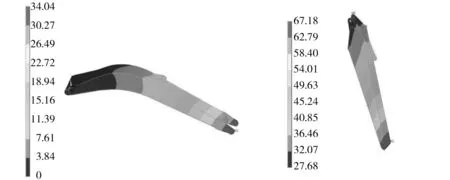
圖7 動臂的變形分布 圖8 斗桿的變形分布
3 結果分件
1)多數情況下,除了特殊的局部如斗齒處應力集中,工作裝置整體的應力都不是很大,均在160 MPa以內。在7種工況中姿態3的工作裝置各構件受力較大。
2)前4種姿態下,工作裝置受力較大,姿態3時,除去斗齒處的應力集中,動臂的最大應力為294 MPa,發生在耳板和動臂的焊接處,斗桿的最大應力為415 MPa,在斗桿油缸與斗桿連接的鉸孔所在板邊緣處。同樣在偏載作用下,姿態3時,工作裝置受力最大,其中斗桿應力最大,發生在斗桿與動臂連接的鉸接孔處,動臂的應力也較大,發生的位置沒有改變,即在耳板和動臂的焊接處。
3)姿態3時,動臂與斗桿鉸接處動臂兩側板的變形為34.58 mm;斗桿與鏟斗鉸接孔處板的變形為78.67 mm。姿態5時,斗桿與鏟斗鉸接孔處發生最大變形為104.89 mm。
4 結語
實體工作裝置集成有限元分析的目的,是在盡量減小因簡化而造成的誤差的前提下,能更精確的模擬挖掘機在不同工況下工作時的受力情況以及對各部件受力情況進行分析。根據有限元分析結果確定挖掘機工作裝置各構件的危險面發生的位置、銷軸鉸接處的應力分布等,不僅為后期室內疲勞試驗的加載提供有力的理論依據,還為挖掘機工作裝置同類共性問題提供具有參考價值的分析方法。
[1]郭立新,王守春,鄭春歧.液壓反鏟挖掘機工作裝置有限元動態分析[J].中國機械工程,2000,11(12):1338-1340. GUO Lixin,WANG Shouchun,ZHENG Chunqi.Hydraulic backhoe working device dynamic finite element analysis[J].China Mechanical Engineering,2000,11(12):1338-1340.
[2]王勖成.有限元法[M].北京:清華大學出版社,2003.
[3]劉本學.液壓挖掘機反鏟工作裝置的有限元分析[D].西安:長安大學,2007. LIU Benxue.Finite element analysis of hydraulic excavator backhoe working device[D].Xi′an:Chang′an University,2007.
[4]任有良.液壓挖掘機工作裝置結構性能分析[D].杭州:浙江大學,2010. REN Youliang .Hydraulic excavator structural performance analysis apparatus[D].Hangzhou:Zhejiang University,2010
[5]中國機械工業聯合會.液壓挖掘機技術條件:GB/T 9139—2008[S].北京:中國標準出版社,2009.
[6]成凱,李山輝,劉述學.裝載機工作裝置的有限元分析[J].農業機械學報, 2001, 32( 6):18-21. CHENG Kai,LI Shanhui,LIU Shuxue.Finite element analysis of loader working device[J].Transactions of the Chinese Society of Agricultural Machinery,2001,32(6):18-21.
[7]杜文靖,崔國華,劉小光.液壓挖掘機工作裝置整體集成有限元分析[J].農業機械學報,2007,38(10):19-23. DU Wenjing,CUI Guohua,LIU Xiaoguang.Integration finite element analysis on whole working squipment of hydraulic excavator[J].Transactions of the Chinese Society of Agricultural Machinery,2007,38(10):19-23.
[8]李發宗,童水光,王相兵.基于模態分析的液壓挖掘機工作裝置動態優化設計[J].農業機械學報,2014,45(4):28-35. LI Fazong,TONG Shuiguang,WANG Xiangbing.Dynamic optimization design for working device of hydraulic excavator based on modal analysis[J].Transactions of the Chinese Society of Agricultural Machinery,2014,45(4):28-35.
[9]陳進,龐小平.單斗液壓挖掘機工作裝置關鍵技術研究[M].北京:科學出版社,2014.
[10]王毅.反鏟液壓挖掘機工作裝置剛柔耦合運動學仿真[D].西安:長安大學,2012. WANG Yi.Rigid backhoe kinematics coupling hydraulic excavator[D].Xi′an:Chang′an University,2012.
[11]孫克義.液壓挖掘機工作裝置的動力學分析與仿真[D].蘭州:蘭州理工大學,2014. SUN Keyi. Dynamics analysis and simulation of the working device of hydraulic excavator[D].Lanzhou: Lanzhou University of Technology,2014.
[12]LE Q H, JEONG Y M, NGUYEN C T,et al. A study on real-time simulation and control of virtual excavator[C]//The 16th International Conference on Mechatronics Technology.Tianjin:ICMT 2012,2012:382-387.
[13]PATEL B P, PRAJAPATI J M.Kinematic working range evaluation for mini hydraulic backhoe excavator attachment[J].International Journal of Automation and Control,2012,6(2):207-214.
[14]車仁煒,呂廣明,陸念力.液壓挖掘機工作裝置的動力學分析及仿真[J].機械傳動,2005,29(2):25-27. CHE Renwei,LYU Guangming,LU Nianli.Dynamics analysis and simulation of the working device of hydraulic excavator[J].Mechanical Transmission,2005,29(2):25-27.
[15]白玉琳.礦用正鏟液壓挖掘機工作裝置虛擬樣機研究[D].重慶:重慶大學,2008. BAI Yulin.Mine hydraulic shovel work virtual prototyping devices[D].Chongqing:Chongqing University,2008.
[16]王相兵.工程機械臂系統結構動力學及特性研究[D].杭州:浙江大學,2014. WANG Xiangbing.Research on engineering and structural dynamics characteristics manipulator system[D].Hangzhou:Zhejiang University,2014.
[17]丁華,朱茂桃,趙剡水.液壓挖掘機動臂的有限元分析[J].中國公路學報,2003,16(4):118-120. DING Hua,ZHU Maotao,ZHAO Yanshui.Finite element analysis of arm of hydraulic excavator[J].China Journal of Highway and Transport,2003,16(4):118-120.
[18]張桂菊,肖才遠.基于Pro/E的液壓挖掘機工作裝置系統仿真與分析[J].邵陽學院學報(自然科學版),2014, 11(2):28-30. ZHANG Guiju,XIAO Caiyuan.The simulation and analysis of the hydraulic excavator system working device based on Pro /E[J].Journal of Shaoyang University(Natural Science Edition),2014, 11(2):28-30.
[19]BOgNJAK S,PETKOVI c'Z,ZRNI c'N,et al. Failure analysis and redesign of the bucket wheel excavator two-wheel bogie[J].Engineering Failure Analysis,2010,17(2):473-485.
[20]YIN Y, GRONDIN G Y, OBAIA K H,et al. Fatigue life prediction of heavy mining equipment:Part 1:fatigue load assessment and crack growth rate tests[J].Journal of Constructional Steel Research ,2007,63(11): 1494-1505.
[21]張愛賓.液壓挖掘機力學分析及工作裝置結構改進[D].大連:大連理工大學,2012. ZHANG Aibin.Mechanical analysis and hydraulic excavator working device structure improvement[D].Dalian:Dalian University of Technology,2012.
(責任編輯:郭守真)
Finite Element Analysis on Whole Working Device of Hydraulic Excavator
SHENGYajun,LIShen,LIXin,PEIPengchao,RENXuejiao
(KeyLaboratoryforHighwayConstructionTechnologyandEquipmentofMinistryofEducation,Chang′anUniversity,Xi′an710064,China)
Take the overall structure of an excavator working device as the research subject. The large-scale finite element analysis software ANSYS is used to set up a solid model of the overall structure of the working device.The contact analysis method is adopted to simulate the pin hinges.The nonlinear strength and deformation under the typical conditions are calculated to obtain the stress and displacement nephograms of the whole working device. The analytical results show that the finite element method based on the entire apparatus greatly reduces the computational error due to the component simplification and have little influence on stress concentration at the connection. Therefore, this method has the guiding significance for the optimization of working device and also provides a reference for the subsequent pilot test and the selection of strain gauge locations.
hydraulic excavator; working device; solid model; finite element analysis
2016-08-03
盛亞君(1991—),女,河南商丘人,碩士研究生,主要研究方向為機械設計及理論,E-mail:1933277511@qq.com.
10.3969/j.issn.1672-0032.2017.01.012
TU623
A
1672-0032(2017)01-0070-06
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
