中醫按摩機器人關鍵技術研究進展
2017-04-12 06:28:10魯守銀李臣
山東建筑大學學報 2017年1期
魯守銀,李臣
(1.山東建筑大學信息與電氣工程學院,山東濟南250101;2.山東建筑大學機器人與智能系統研究院,山東濟南250101)
中醫按摩機器人關鍵技術研究進展
魯守銀1,2,李臣1
(1.山東建筑大學信息與電氣工程學院,山東濟南250101;2.山東建筑大學機器人與智能系統研究院,山東濟南250101)
中醫按摩機器人可以協助或代替醫師完成按摩任務,國內外對中醫按摩機器人的相關技術展開了研究,但仍有許多關鍵技術亟待解決。開展中醫按摩機器人關鍵技術研究,有助于構建統一的中醫按摩機器人系統技術架構,可為中醫按摩機器人的產業化提供技術參考。文章圍繞國內外按摩機器人的研究和應用現狀,在對現有研究成果與中醫按摩機器人實際應用需求分析的基礎上,闡述了中醫按摩機器人按摩手法機理及建模,運動機構的剛柔結構體的可靠性設計、伺服運動控制和穴位定位及經絡軌跡跟蹤伺服運動控制、控制系統體系結構設計、本體機械機構設計以及安全保護機制等關鍵技術問題,展望了中醫按摩機器人的未來研究與發展方向以及未來需重點研究的關鍵技術問題。
機器人;中醫按摩;穴位定位;運動控制
0 引言
中醫按摩治療是指用手或者其他肢體部位作用于人體表面,利用一定規律的力量和運動刺激人體穴位,促進血液循環、改善機體功能。中醫按摩作為輔助治療方法,遵循“自然療愈理論”,通過增強免疫力的手段達到自然康復的目的,對保證身體健康有著重要的作用[1-4]。但迄今為止,中醫按摩手法的操作仍需人工進行,體力消耗巨大,并且按摩療效與按摩醫師的水平和工作態度密切相關,按摩質量不統一,按摩手法因人而異,很難標準化。
按摩機器人是中醫按摩手法在現代康復醫學、人工智能、智能感知及機器人技術領域相互滲透、結合的高技術產物,它可以協助或代替按摩醫生完成常規按摩手法的動作,可把按摩醫師從繁雜的體力勞動中解放出來,并通過其精確的力/位置反饋控制使按摩手法更加規范,按摩治療效果更加穩定。近10年來,中醫按摩機器人研究引起了國內外很多學者和科研機構的興趣,成為了醫療保健機器人研究領域的熱點之一。目前,無論是在國內還是國外,機器人技術在中醫按摩領域的研究和應用只是處于起步階段,尚未有可以直接引用的技術標準[5-7]。
文章首先對中醫按摩機器人目前取得的階段性研究成果進行了介紹,其次對中醫按摩機器人產品研發中必須解決的關鍵技術問題進行了分析,并對該機器人系統的各組成模塊的技術規范進行了深入的探討,有助于構建一個統一的中醫按摩機器人系統技術架構,為中醫按摩機器人的產業化提供技術參考。
1 國內外研究現狀
中醫按摩歷史悠久,在周朝,人們就已經開始了按摩手法及其治療效果的研究和總結,到唐朝時,按摩治療相關疾病的方法就已經在臨床治療上得到了普及[8]。目前,按摩理論體系隨著社會及科技的發展趨向統一,人們采用中西醫結合的方法豐富了中醫按摩理論,在傳統的中醫經絡理論和中醫手法的基礎上,逐步形成了針對特定適應癥的按摩方法,健全了按摩理論體系[9-12]。
借助于先進的科學技術,人們從按摩的方法、按摩的機理、按摩的裝置和按摩的安全性等方面對按摩進行了廣泛而深入的研究。秦杰等采用手套式的力覺測量設備對按摩手法中的滾手法進行了在體測量,從能量的角度分析了該手法在人體按摩過程中的作用效果[13],朱立國等通過提取力學參數的方法對旋轉手法的操作過程進行動態測量[14],孫武權等利用實驗探討了按摩頻率與手法的刺激量之間的相互關系[15]。
為了更好地推廣中醫按摩的臨床應用,減輕按摩治療師的勞動強度,機器人領域的一些學者、中醫按摩行業的一些專家以及許多科研機構在將機器人應用于中醫按摩方面也做了大量的嘗試性研究工作[15],很多學者和研究機構對中醫按摩輔助或裝備以及按摩機器人技術進行了深入的研究[5,7,16]。Masao Kume率先展開了按摩機器人研究,開發了一款具有4個自由度的按摩機器人,采用力/位置控制的雙閉環控制技術,實現了對肩部的“捏拿”按摩動作,并驗證了利用機器人完成人工按摩手法的可行性[17]。Kang等研究了捶背按摩機器人,可以完成人體背部的按摩手法[18]。有研究者開發了一種具有力傳感器的13個關節、4指按摩手的仿人手多指按摩機器人,通過按摩力量的離線示教,可控制按摩手實現多種按摩動作[19-21]。國內關于按摩機器人的研究,在2008年以前還大都停留在按摩機理分析和實驗室試驗或計算機仿真階段,有些學者在按摩手法的建模和機械機構實現方面進行了大量的研究。如有研究者對按摩手法的機理進行了分析[22-24];有學者提出了基于并聯機構的中醫按摩機器人機型[25-27];余順年等提出了混合型并聯機器人構型[28]。
在國家“863”計劃的支持下,山東建筑大學機器人技術與智能系統研究院開展了中醫按摩機器人的研究[5],完成了中醫按摩機器人功能樣機的研制,如圖1(a)所示。該機器人功能樣機擁有2個按摩機械臂,每個機械臂的末端均安裝有多功能按摩手,多功能按摩手采取仿人手結構,由5個手指組成,可實現“指揉”、“指按”、“掌揉”、“掌按”、“掌推”、“捏拿”、“滾壓”、“扣擊”、“振”和“顫動”等手法的按摩動作;機器人在進行按摩時,通過機器人視覺技術和人體穴位分布幾何模型進行穴位的識別和定位,主要針對中老年退行性腰腿痛的中醫按摩保健治療進行了臨床試驗,證明了按摩機器人按摩手法治療效果的有效性。2010年,為了提高其實用性,便于應用推廣,在國家“863”計劃的再次支持下,山東建筑大學對第1期中醫按摩機器人樣機的結構、外觀等又進行了優化,研制出了具有單機械臂的中醫按摩機器人產品化樣機[6],如圖1(b)所示。為了進一步降低機器人成本,便于機器人產品的市場推廣,2015年山東建筑大學開始了中醫按摩機器人系列化的研究,在前2代中醫按摩機器人的研究基礎上,又進行了第3代中醫按摩機器人產品樣機研制,其機器人總體結構如圖1(c)所示。
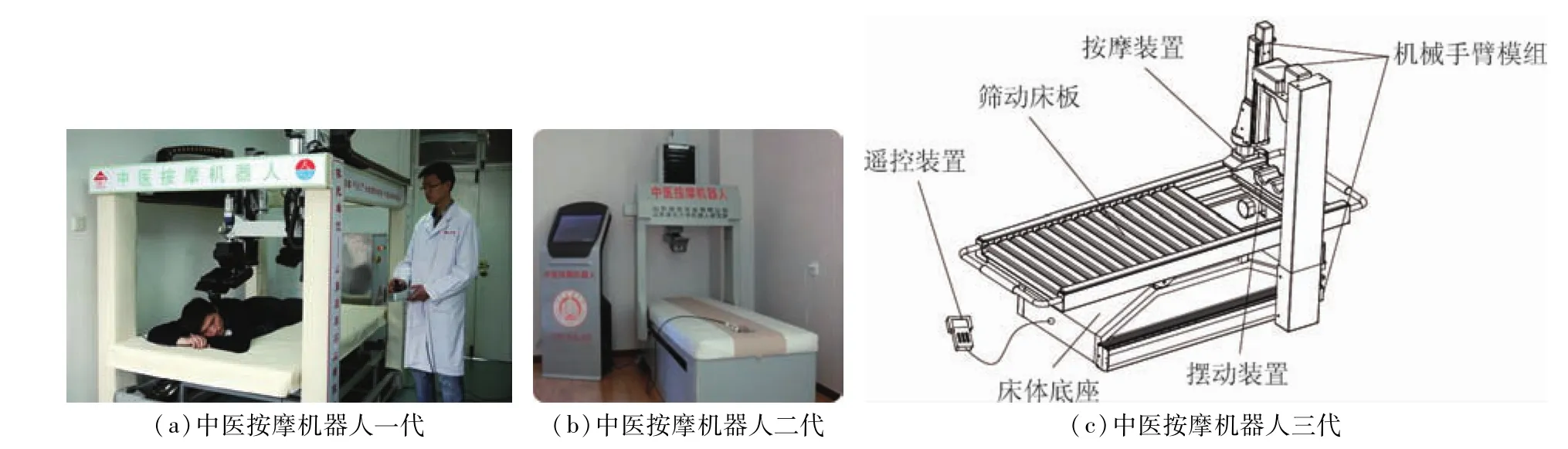
圖1 中醫按摩機器人實驗室樣機圖
2 機器人應用于中醫按摩中的關鍵技術設計
中醫按摩機器人主要由按摩機械機構、運動控制系統、上位機總控系統、生理指標檢測系統等部分組成,其中機械機構包括運動機構、按摩裝置、按摩調節床體平臺等。該機器人直接和人體進行接觸,動作稍有不慎,就可能對用戶造成身體傷害,所以對其各項技術的安全可靠性要求很高,在進行按摩機器人研究開發過程中,其需要突破的關鍵技術有如下概述。
2.1 常規按摩手法機理分析及建模
按摩手法發展到今天,雖然形成了很多門派,按摩手法也多種多樣,但其手法都要求基本動作具備有力、均勻、柔和、深透等特點。因此,要想很好地發揮按摩手法的治療保健效果,要掌握掌推、掌按、指按、掌揉、指揉、捏拿、點、拍等常用按摩手法的人工按摩機理,掌握按摩手法的運動學和動力學特點,這樣才能通過機器人來完成相應的按摩手法。
在進行某個按摩手法建模時,應重點考慮如下技術點:(1)相應按摩手法的著力點運動軌跡的運動學建模;(2)按摩過程中按摩力的動力學建模;(3)相應按摩手法的按摩動作重復頻率;(4)人體經絡連續軌跡按摩過程中,按摩裝置柔順力/位置控制問題。為了便于描述,需要首先建立如圖2所示的坐標系,其中z軸和人體被按摩面相垂直,x軸和y軸與按摩面相平行,x軸為人體縱向,y軸為人體橫向,α、β和δ分別為繞x、y和z軸的旋轉角度。
以中醫臨床治療老年退行性腰腿疼痛的按摩手法為例來進行分析,其所采用的中醫按摩手法主要有滾壓法、指揉法、捏法、掌按法和振法,對于這些常用的按摩手法很多學者進行了大量的研究[27-33],得出了一些常用按摩手法的運動學和動力學特征描述[25],見表1,其中輸出矩陣內的“●”表示非期望輸出為常數。
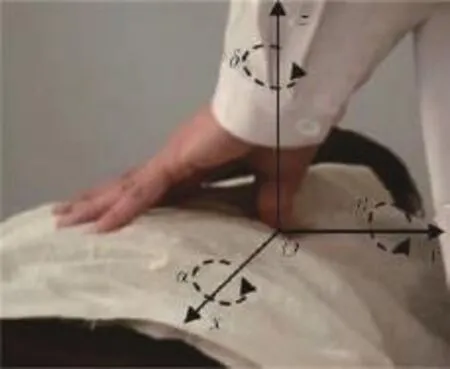
圖2 按摩手法坐標系圖
由表1可以看出這些按摩手法的實現,需要有多個自由度的機構協調運動才能實現,表1所給出的也只是實現上述按摩手法動作的最少機構自由度數量。要使按摩機器人運動靈活,就必須考慮機器人配有足夠多的自由度數量及其相應的關節活動范圍。
2.2 負載剛柔結構體的可靠性設計
安全可靠的機械機構是機器人能否正常工作的基本條件[5,7]。如何根據中醫按摩手法的運動學及動力學特征設計出可行的按摩運動機構構型是進行中醫按摩機器人產品研發要解決的首要問題之一[37-40]。針對中醫按摩手法,很多學者進行了大量的研究,提出了很多種實現相關按摩手法的機械機構形式[26-28]。無論何種機構形式,在進行按摩機器人本體設計時都應考慮如下幾項基本技術指標:(1)外形盡量簡潔,減小患者心理上的排斥感;(2)機械臂具有較好的剛度,同時要求機械臂末端的按摩裝置具有一定的柔性,在滿足力量和精度要求的同時,保證按摩的安全性和舒適性;(3)具有足夠的精度,滿足按摩過程中穴位定位以及按摩軌跡控制的精確度要求,順利地完成按摩動作;(4)具有足夠靈活的機械機構,機器人在按摩時能到達指定的穴位,可對不同體型以及身體的不同部位實施舒適有效的按摩動作。

表1 中醫按摩手法運動學和動力學特征
2.3 復雜結構下的自主按摩行為運動控制系統
中醫按摩機器人在給患者進行按摩的過程中,患者的身體姿態很難保持長時間的穩定。為了保證時刻與患者的姿態相適應,機器人的姿態也要隨時調整,因此,機器人運動過程中呈現出三維空間的復雜運動狀態。另外,再考慮到按摩過程中按摩機械臂末端按摩裝置所受到的摩擦力以及在背部、臀部、大腿和小腿等身體不同部位按摩時受到的阻力變化等其他未知環境和用戶身體特點等因素的影響,要實現按摩機器人的按摩手法的自主控制與穴位或經絡曲線的位置或力的精確跟蹤是有一定難度的。所以,為了實現機器人在中醫按摩領域的成功應用,提高按摩動作實現的自動化,實現按摩治療方案自主生成,需要突破的關鍵技術問題有:
2.3.1 機器人運動學和動力學建模分析
要想實現機器人在中醫按摩過程中的精確控制,首先要建立按摩機器人的運動本體機構的運動學模型和動力學模型。在進行按摩機器人動力學建模時,應首先要解決的技術問題如下:
(1)必須考慮按摩機器人作業過程中作業對象的柔性特點和人體姿態動態不確定性問題。按摩機器人的作業對象是人的身體,身體不同部位具有不同的剛柔度,所以機器人按摩作業時的作業環境也存在很大的不確定性,這將對按摩機器人按摩手法動力學建模帶來很大的影響[33]。如當機器人按摩裝置在背部按摩時,由于身體是凹凸不平的,需要一個向下的壓力的同時需要沿按摩軌跡移動。在按摩過程中,患者在按摩力的作用下身體相關部位會產生前后及上下移動,這種移動會傳遞給床體,從而也會引起按摩機械臂振動,這樣,按摩機器人和患者之間就形成了一個強耦合系統[37]。
(2)具有彈性特點的按摩床體平臺、按摩裝置和機械臂關節剛柔耦合機構的非線性特性研究[37]。為了提高機器人在中醫按摩動作執行過程中的作業效率,機械臂的各關節連接桿件、零部件等應盡可能采取強度高的輕質材料,并要求具有快速響應能力。為了保證按摩機器人按摩過程中手法實現的位置/力精度和穴位位置/力跟蹤精度,按摩機器人機械零部件的彈性效應是不能忽視的。因此,在研究按摩機器人動力學時,應該充分考慮按摩機器人的剛體運動過程中彈性振動帶來的綜合影響[44]。
2.3.2 機器人伺服運動控制
機器人按摩過程中,為了保證按摩手法的實現,按摩機器人要進行運動速度和位置的精確控制。在按摩機器人運動過程中,按機器人本體各部件受到的摩擦力以及在安裝裝置經過臀部、腰部到背部時機械臂抬起的高度不夠時受到的阻力構成了機器人動力學控制中的不確定性因素,因此,這種情況下采用傳統的PID控制方法可能無法達到運動控制的精度要求。所以,考慮到上述非線性因素和不確定性因素等對按摩機器人系統動力學非線性特性的影響,應結合機器視覺伺服控制、智能感知、神經網絡、模糊控制、深度學習算法、遺傳算法、自適應控制或魯棒控制等先進控制策略,研究按摩機器人不確定條件下的精確位置/力控制[34-36,45-48]。
為了很好實現按摩機器人的按摩工作,每個患者的按摩治療方案應根據其自身情況定制,還要考慮患者在按摩過程中的身體狀況,根據患者的實時生理指標隨時調整按摩流程。按摩機器人的控制系統需要處理的信息種類繁多,主要有(1)按摩醫師或專家系統根據患者癥狀制定的按摩方案及其分解過后形成的機械機構動作序列;(2)患者生理指標實時信息;(3)機器人本體內部傳感器反饋信息;(4)患者在按摩過程中的實時反饋信息等,還有按摩過程需要處理的控制信息,如圖3所示。
2.3.3 機器人穴位識別與經絡軌跡跟蹤
中醫按摩過程中穴位識別是非常關鍵的步驟,由于人體體型狀態差異較大,導致穴位尋找的難度較大,這就要求按摩機器人具有更智能的控制策略。在中國傳統醫學中,常用同身寸作為人體穴位定位時的度量單位,雖然每個人的高矮、胖瘦體型均不相同,但是根據同身寸的原理,每個人的穴位幾何分布圖還是有規律可循的[34]。如果能找到幾個關鍵的穴位,然后根據人體穴位幾何分布圖模型,就可以推算出其他穴位的坐標。在進行機器人按摩時,首先選定幾個關鍵的穴位(一般3~5個);然后利用特征較為明顯的標志點貼在所選定的上述關鍵穴位處,由按摩機器人的視覺系統自動識別出來[36],并與人體穴位分布圖中相應穴位進行匹配,進而推算出其他穴位的坐標[43],完成患者人體穴位的初始定位。
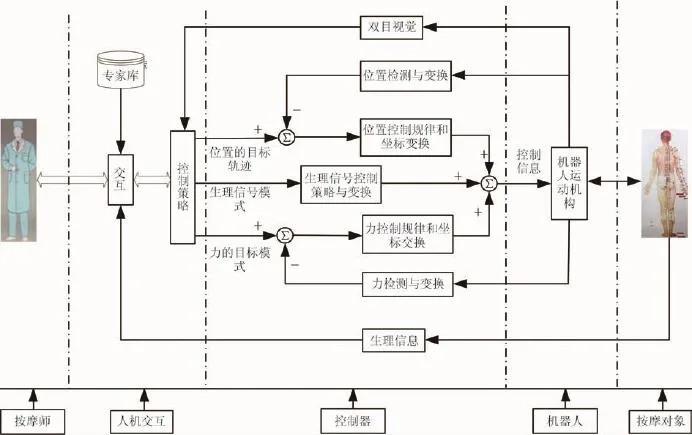
圖3 按摩機器人控制系統結構圖
2.4 按摩機器人總控系統
在按摩過程中,如何對患者穴位或經絡軌跡實時跟蹤也是要解決的關鍵問題之一。為此,許多學者采用了視覺識別技術方案,獲得了一些實驗結果[34,36]。該視覺識別技術方案在按摩過程中實時采集分析用戶的人體按摩部位圖像,得到人體穴位標志點的坐標,通過對前后兩幅圖像穴位標志點坐標的比較,判斷用戶在按摩過程中的移動情況,并實現對標注點按摩穴位和經絡的動態跟蹤[34]。按摩機器人在進行按摩作業的過程中,穴位跟蹤的實現方法如圖4所示。
總控系統主要包括人機交互、機器人本體和控制系統三部分。其中控制系統主要包括按摩治療方案專家系統、實時/歷史數據庫、生理指標檢測、穴位定位及跟蹤、示教控制、通信控制器等模塊,主要負責按摩治療任務的建模、按摩任務的規劃調度、按摩手法的動作序列的規劃和按摩動作的運動控制、按摩機構狀態監控以及機器人狀態異常處理、人機交互等任務[5]。
2.4.1 按摩控制系統體系結構
總控系統主要處理三類任務信息:機器人本體任務、患者和醫師任務以及人機交互任務。其中,(1)機器人本體任務信息 主要包括機器人運動機構姿態信息、按摩手法模型描述、患者基本信息、人體生理指標實時信息、治療方案實時信息、運動過程報警信息等;(2)患者和醫師任務信息 主要包括患者基本信息、癥狀描述信息、按摩治療方案、患者疼痛閾值、穴位標記點和患者生理信息、按摩進度監控信息;(3)人機交互任務信息 包括病情輸入、疼痛閾值輸入、治療過程中監控、按摩信息、按摩位置自動采集、生理信息監控、機器人復位歸零、按摩方案的調整和確定、按摩過程執行和終止。
基于以上需求,按摩機器人體系結構主要組成為:(1)人機交互系統 人機交互系統應由交互裝置、專家系統、控制器、機器人本體四部分組成。(2)機器人本體 主要包括按摩調節床體平臺、按摩機械臂、多功能按摩頭等。(3)總控系統 總控制系統包括上位機控制器和運動控制器,上位機控制器應根據按摩任務和各個子系統的狀態信息,完成按摩任務的分配、控制各個子系統協調運動。總控制系統的信息管理方式采取分層結構,在按摩過程中,其任務處理可分為四個主要的階段,即診斷階段、準備階段、按摩治療階段和歸檔階段,如圖5所示。
2.4.2 基于多源信息反饋的專家控制按摩管理系統
與常規的工業機器人作業過程不同,在機器人按摩的過程中不但要實時監控機器人本體的運行參數,還要實時監控患者的生理指標參數,并根據這些參數來采取相應的控制策略[5]。推拿按摩的療效與按摩師的水平經驗密切相關,不同的病癥需要不同的按摩理療方案。中醫按摩領域也需要一支龐大的按摩技術隊伍,因此,為了制定較為可行的按摩診療方案應該采取專家控制系統。
在機器人進行按摩控制的過程中,專家控制系統依據專家庫中的中醫按摩專家知識和患者的癥狀,由推理機產生按摩治療專家方案[53],同時根據機器人本體狀態信息和用戶實時生理指標數據,調整按摩動作序列中有關按摩指令,驅動按摩動作執行電機,完成相應的按摩動作。按摩專家控制系統是采用人工智能方法,模擬中醫按摩醫生根據中醫知識和用戶癥狀來制定按摩方案的專家經驗來生成按摩治療方案的一種智能化方法[6],專家系統包括人機界面、按摩知識專家庫、治療方案推理機等組成部分,圖6給出了按摩專家控制系統的原理示意圖。
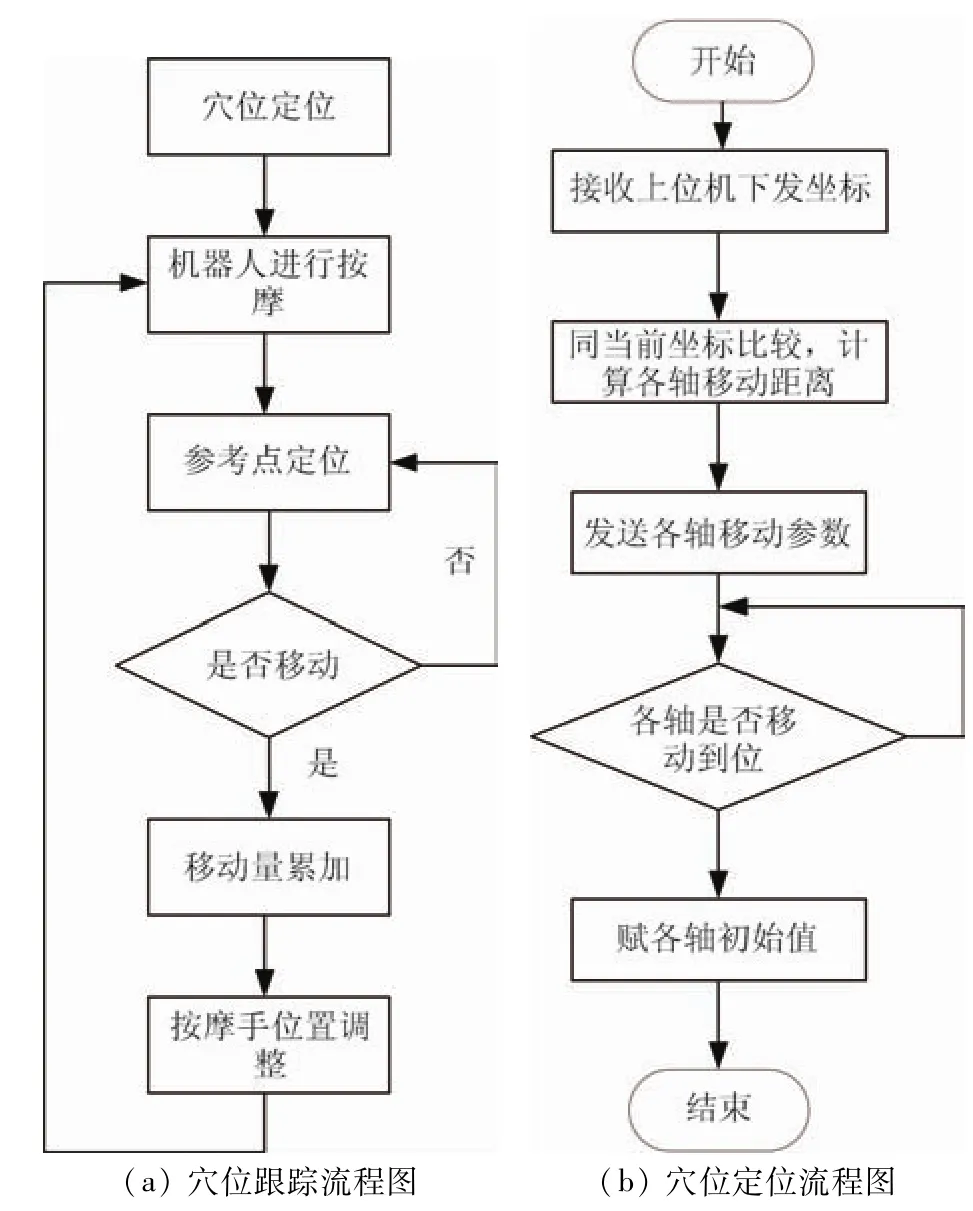
圖4 穴位跟蹤定位流程圖
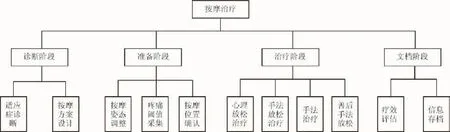
圖5 機器人按摩過程圖
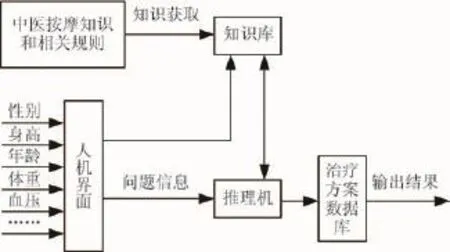
圖6 中醫按摩專家系統示意圖
2.5 按摩機器人本體機構設計
中醫按摩機器人本體機構主要包括摩調節床體平臺、按摩機械臂、床體升降機構、驅動機構、按摩裝置等部分組成,如圖7所示。按摩調節床體平臺主要由床架升降機構、升降驅動機構、床架固定機構、床板等組成。在床體上部安裝有支撐架,機械臂可以安裝在支撐架上。中醫按摩機器人的按摩調節平臺主要由可升降的床體、床板等組成,如圖8(b)所示。為保證使用者的安全,按摩調節平臺應設置快速下降的功能,當遇到特殊情況時,使床體迅速下降,從而保證患者的安全[5]。
按摩裝置安裝在機械臂的末端,如圖8(a)所示,能夠仿人工按摩手法完成相應的中醫按摩動作。按摩裝置主要包括固定支撐部件、連接部件和按摩執行裝置三部分。按摩執行裝置左側板部件上安裝固定有手腕電機,手腕電機的電機動力軸與連接部件的左搖臂相連,按摩執行裝置的右側板部件上固定安裝有與電機軸動力同軸的電機防護總成,電機防護總成與連接部件的右搖臂相連,可以繞電機動力軸旋轉,按摩裝置結構圖如圖8(b)所示。在手指以及各關節處都裝有傳感器,實時測量按摩過程中手指以及各關節力的大小以保證患者以及機器人本體的安全,下圖為按摩裝置力傳感器布置結構示意圖,如圖8(c)所示。
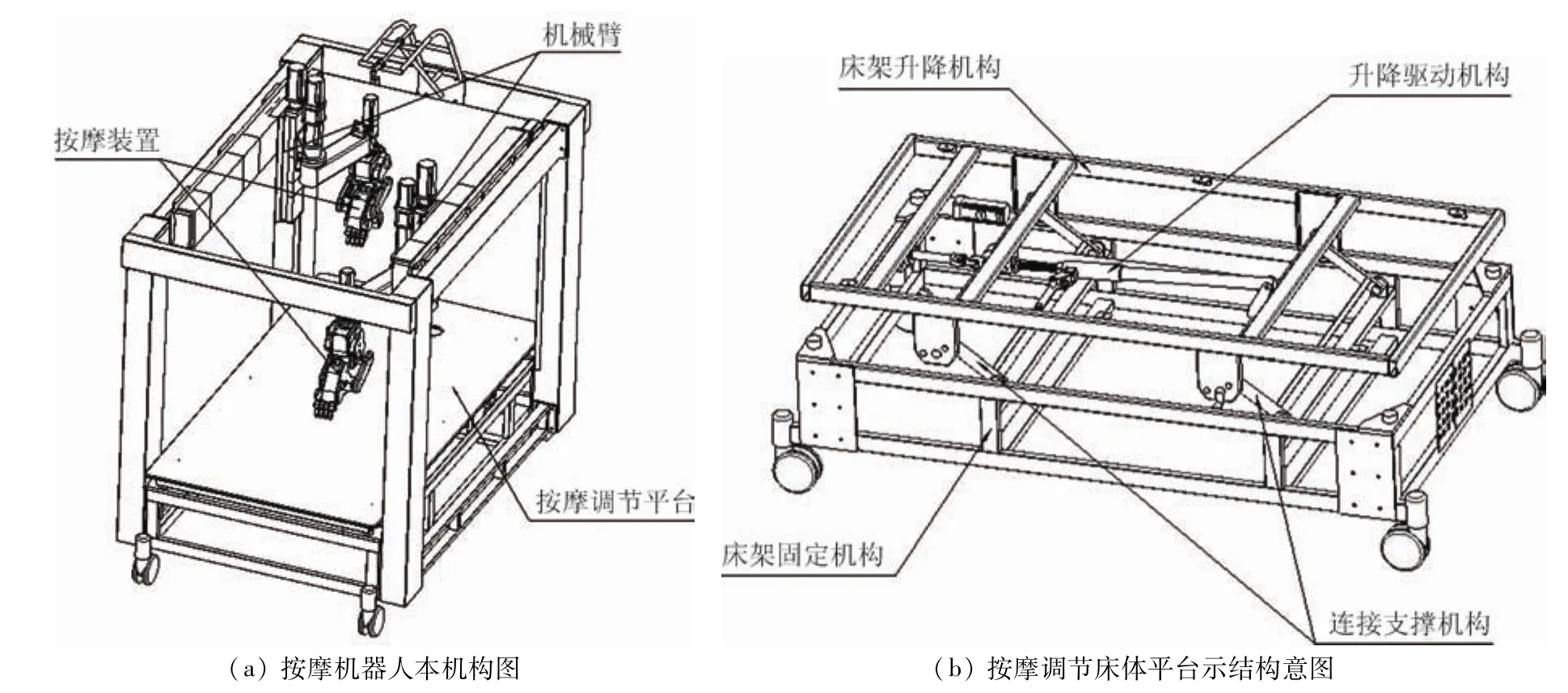
圖7 中醫按摩機器人本體機械機構圖
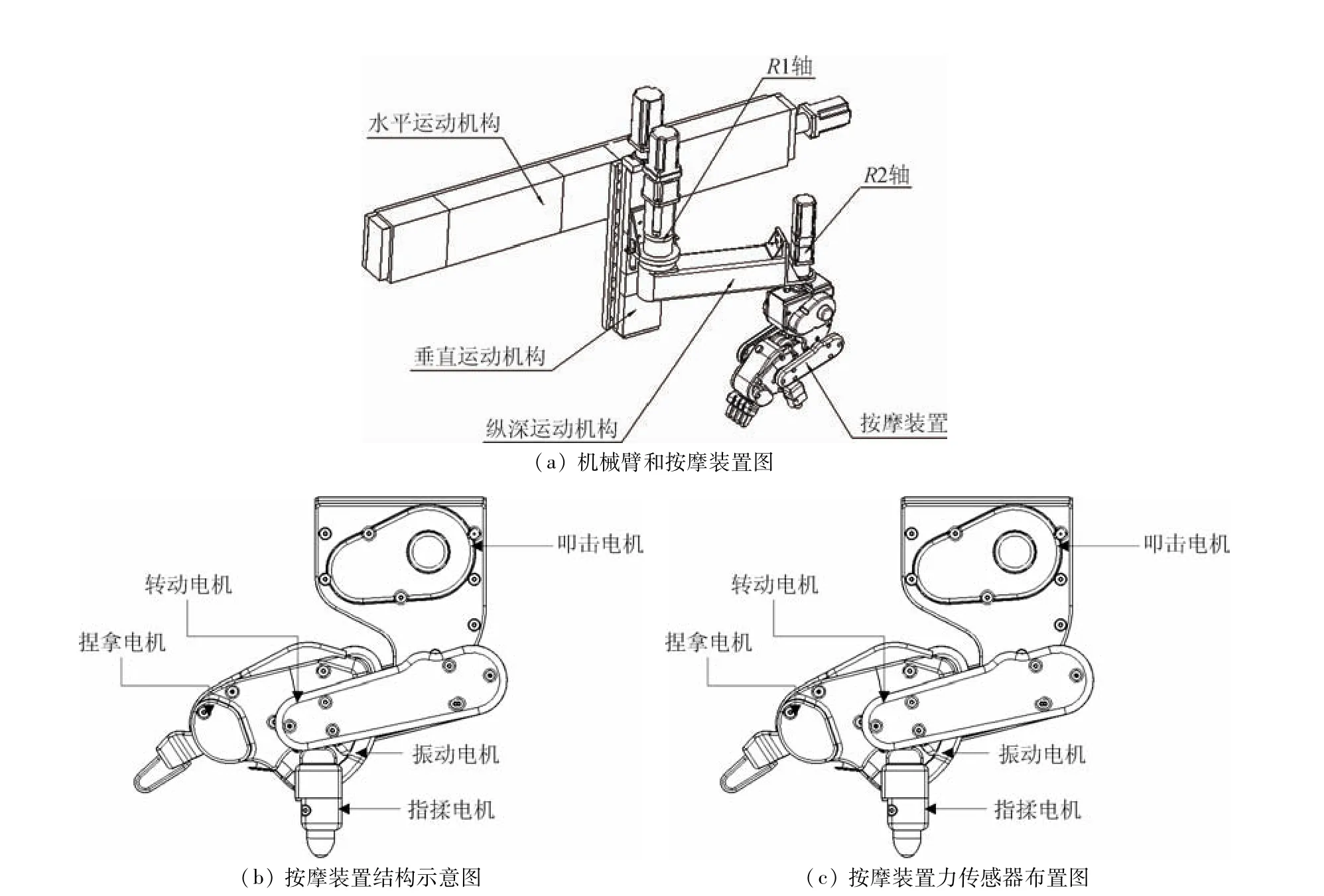
圖8 機械臂及按摩裝置示意圖
2.6 按摩機器人的安全保護機制
按摩機器人的工作對象是人,為保證其安全可靠地工作運行,必須研究按摩機器人的安全保護機制,主要包括:安全電壓保護機制、急停觸發保護機制、機械結構保護機制、抗電磁干擾保護機制。其中,急停觸發保護機制和機械機構保護機制是研究的重點。
急停觸發保護機制 急停觸發有急停按鈕觸發、壓力反饋值過大觸發、生理指標異常觸發、限位開關觸發以及上位機急停觸發。當患者在按摩過程中身體感到異常時可通過手中的急停按鈕使按摩緊急停止,當上位機采集到到按摩裝置上的壓力傳感器壓力值過大或檢測到生理指標異常(如血壓上升、心跳加速等)時,按摩手停止動作,z軸并向上運動,異常解除后可繼續按摩。
機械機構保護機制 機器人在進行機械結構設計時在特定的關節以及滑動機構設置機械限位或安裝限位開關保證機器人的安全運行;為保證使用者的安全,按摩調節床體平臺應該考慮平臺手工快速下降動作的實現,在機器人系統緊急斷電時,通過按摩調節平臺的快速下降使按摩手或按摩裝置與人體快速脫離保證使用者的安全。
3 展望
隨著機器人在中醫按摩領域的研究和臨床應用的開展,已經對一些關鍵技術進行了較為深入的探討,部分關鍵技術也取得了一定的進展。雖然也研制完成了實驗室功能樣機和產品樣機,但是要作為產品安全可靠地進行大面積臨床應用,按摩機器人尚有很多關鍵技術有待突破。未來按摩機器人的發展要求機器人在復雜環境下具有更高的適應性、自主性及可靠性,智能化與自主化是按摩機器人的發展趨勢。為了加快中醫按摩機器人的產品研制速度,促進機器人技術在中醫保健行業的應用,建議未來的研究和應用應考慮如下幾個方面的工作:
(1)專家控制在線管理系統 基于多源信息反饋的專家控制在線管理系統要實時監控患者的生理指標參數,根據患者的生理反饋信息與專家知識庫的知識經驗生成治療方案;不同體型及患者身體的不同部位要根據專家系統實施不同的按摩治療方案,患者身體不同部位施力的大小、方向、頻率都要根據專家系統實時在線生成。
(2)機械機構優化 探索新材質提高按摩手的柔韌度,提高按摩手的按摩舒適度,優化按摩機器人本體結構,使機器人外形盡量簡潔,減少患者的心理排斥感。
(3)多傳感器信息融合技術 根據采集到的患者的生理指標參數以及各處力傳感器的反饋信息,利用多傳感器信息融合技術,結合專家系統生成并實施不同的按摩治療方案,提高按摩過程中的安全性與舒適性。
(4)相關標準與技術規范 對按摩機器人進行改進、定型,形成按摩機器人產品量產、臨床應用技術規范以及按摩機器人產品技術質量監管等相關產品標準或技術規范,擴大機器人技術在醫療保健服務行業的應用領域。
[1] 馮燕華.試論中醫推拿與西方按摩的異同和發展[J].按摩與導引,1999,88(4):4-6.
[2] 黃健,郭麗娃.古代自然療法的發展與東西方傳統文化[J].醫學與哲學,1992(1):52-53.
[3] Billhult A.,Stener V.E.,Bergbom I..The experience of massage during chemotherapy treatment in breast cancer patients[J].Clinical Nursing Research,2007,16(2):84-99.
[4] Hymel G.M..Advancing massage therapy research competencies:dimensions for thought and action[J].Journal of Bodywork&Movement Therapies,2003,7(3):194-199.
[5] 高煥兵,魯守銀,王濤,等.中醫按摩機器人研制與開發[J].機器人,2011,33(5):553-562.
[6] 劉玲云,魯守銀,張營,等.中醫按摩機器人專家控制系統的研究[J].計算機測量與控制,2016,24(4):55-57.
[7] 胡磊.按摩機器人關鍵技術研究[D].哈爾濱:哈爾濱工程大學,2015.
[8] 劉柏齡.我國傷科手法治療的淵源、發展及應用[J].新中醫,1984(3):4-7.
[9] 王端祥.淺論按摩療法的基本原理與進展[J].按摩與康復醫學,2004,20(6):56-57.
[10]郭郡浩.推拿治療適應癥近況[J].按摩與康復醫學,1999(1):9-10.
[11]趙振豐.震顫推拿治療胃脘痛38例臨床觀察[J].中國科技信息,2007(11):201,203.
[12]王亮.足部按摩應激治療高血壓危象100例臨床體會[J].雙足與保健,1994(1):17-19.
[13]秦杰,趙鵬,劉家勇,等.在體手法測量系統對(扌袞)法的生物力學分析[J].中醫正骨,2004,16(12):4-5.
[14]朱立國,馮敏山,畢方杉,等.頸椎旋轉(提)手法的在體力學測量[J].中國康復醫學雜志,2007,22(8):673-676.
[15]孫武權,嚴雋陶.推拿手法頻率的理論探討與實驗研究[J].按摩與導引,2002,18(5):2-4.
[16]Kume M.,Morita Y.,Yamauchi Y.,et al..Development of a Mechanotherapy Unit for Examining the Possibility of an IntelligentMassage Robot[C].Osaka:International Conference on Intelligent Robots and Systems,1996.
[17]Jones K.C.,Du W..Development of a Massage Robot for Medical Therapy[C].Kobe:International Conference on Advanced Intelligent Mechatronics,2003.
[18]Kang C.G.,Lee B.J.,Son I.X.,et al..Design of a Percussive Massage Robot Tapping Human Backs[C].Kobe:The IEEE International Symposium on Robot and Human Interactive Communication,2007.
[19]Terashima K.,Kitagawa H.,Miyoshi T.A.,et al..Modeling and massage control of human skin muscle by usingmulti-fingered robot hand[J].Integrated Computer-Aided Engineering,2006,13(3):233-248.
[20]Mouri K.,Terashima K.,Minyong P.,et al..Identification and Hybrid Impedance Control of Human Skin Muscle by Multifingered Robot Hand[C].San Diego:International Conference on Intelligent Robots and Systems,2007.
[21]Teramae T.,Kushida D.,Takemori F.,et al..Control Strategy for the Massage Chair Based on Human Skin Elasticity[C]. Kagawa:SICE Annual Conference,2007.
[22]丁寶清.淺論反射療法按摩手法之理[C].反射學全國研討會會議交流文集.北京:中國足部反射區健康法研究會,2006.
[23]周太安,宋俐榮.理筋手法研究方法初探[J].中國骨傷,1997(3):39-40.
[24]程靜茹.中醫推拿按摩,講究手法[J].健身科學,2014(10):35 -35.
[25]余順年,馬履中,陳扼西,等.新型串并聯中醫推拿機器人研究[J].中國機械工程,2005,16(19):1773-1778.
[26]馬履中,姚國營,倪前磊,等.實現滾法中醫推拿并串混聯機器人的研究[J].機械設計與研究,2005,21(6):43-46.
[27]余順年,馬履中,郭宗和.中醫推拿手法運動學與動力學特征分析[J].山東理工大學學報:自然科學版,2005,19(3):82-85.
[28]余順年,陳扼西,馬履中.基于并聯機構中醫推拿機器人機型研究[J].工程設計學報,2006,13(6):400-405.
[29]張偉.機器人按摩手法與控制技術研究[D].南京:東南大學,2013.
[30]楊國亮,余順年.新型中醫推拿混聯機器人按摩“力度”模型[J].機電技術,2012(5):2-4.
[31]呂杰,曹金鳳,方磊,等.中醫屈指推法的生物力學建模及分析[J].中國組織工程研究與臨床康復,2011,15(17):3183-3186.
[32]馬惠昇,張宏,苗志杰,等.推拿(扌袞)法動力學參數優化實驗研究[J].中國康復醫學雜志,2006,21(12):1116-1118.
[33]陳守吉,嚴雋陶.中醫推拿擺動類手法的動力學研究:(I)生物力學模型及方程[J].醫用生物力學,1996(2):112-116.
[34]張化凱,魯守銀,杜光月.基于模板匹配的穴位定位與跟蹤研究[J].科技通報,2011,27(5):666-670.
[35]王洪玲.劉存根基于模糊控制器的按摩機器人的力度控制[J].山東建筑大學學報,2010,25(6):586-590.
[36]張化凱.基于視覺的中醫按摩機器人穴位定位與跟蹤系統[D].濟南:山東建筑大學,2012.
[37]馬培良,劉相秋,李根成.考慮剛柔耦合的機構運動可靠性研究[J].航空兵器,2014(2):58-60.
[38]戴學豐,孫立寧,劉品寬,等.柔性臂機器人控制算法綜述[J].電機與控制學報,2002,6(2):158-161.
[39]謝俊,張俊,馬履中,等.中醫推拿機械臂機構設計及運動仿真[J].工程設計學報,2011,18(5):344-348.
[40]陳鵬,劉璐,余飛,等.一種仿人機械臂的運動學逆解的幾何求解方法[J].機器人,2012,34(2).
[41]趙慶波,趙德安,姬偉,等.采摘機器人視覺伺服控制系統設計[J].農業機械學報,2009,40(1):152-156.
[42]李明富,馬建華,張玉彥.基于機器人的空間坐標測量技術研究現狀及發展趨勢[J].機械科學與技術,2014,33(12).
[43]王東署,遲健男.機器人運動學標定綜述[J].計算機應用研究,2007,24(9):8-11.
[44]曾京,羅仁.考慮車體彈性效應的鐵道客車系統振動分析[J].鐵道學報,2007,29(6):19-25.
[45]趙建東,邵黎君,徐凱,等.基于CAN總線的仿人機器人關節伺服控制系統研究[J].機器人,2002,24(5):421-426.
[46]王耀南,李樹濤.多傳感器信息融合及其應用綜述[J].控制與決策,2001,16(5):518-522.
[47]孫斌,楊汝請.開放式機器人控制器綜述[J].機器人,2001,23(4):374-378.
[48]程玉虎,易建強,趙冬斌.機器人行為協調機制研究進展[J].機器人,2004,26(2):187-192.
[49]劉慶運,錢瑞明,顏景平.機器人多指手抓取運動學研究綜述[J].機械科學與技術,2006,25(8):967-971.
[50]宮金良,張彥斐,高峰.機器人末端運動特征描述方法[J].機械設計,2006,23(11):16-18.
[51]高云峰,吳秀芬.服務機器人視覺系統模塊化研究綜述[J].機械設計與制造,2010(2):165-167.
[52]杜濱,趙京.移動機械臂平臺位置優化及運動規劃[J].高技術通訊,2013,23(5):546-552.
[53]王克,庫祥臣,李濟順.專家系統在編制彈簧卷繞工藝中的應用[J].機床與液壓,2010,38(6):4-6.
Research progvess of key technology of Chinesemedicalmassage robot
Lu Shouyin1,2,Li Chen1
(1.Schoolof Information and Electrical Engineering,Shandong Jianzhu University,Jinan 250101,China;2.Robotand Intelligent Systems Research Institute,Shandong Jianzhu University,Jinan 250101,China)
The Chinese medica massage robot,which can assist or take the place of the massage technician to achieve the task of massage,has been studied by a lot of researchers or scientific research institutions in recent years.However,there are stillmany key technologies to be solved.The research on the key technology of Chinese medical massage robot is helpful to build a unified technology framework,which can provide technical reference for the industrialization of Chinese medicalmassage robot.The research and application of the massage robot at home and abroad are introduced,and the systematic analysis and in-depth summary of the achievements in this field are given.According to the existing research results and practical demand analysis,key technologies of the massage robot are deeply discussed,including mechanism analysis and modeling of massage manipulation,the design of massage movementmechanism of rigid flexible coupling structure with high reliability,acupoint positioning and meridian locus tracking servo motion control,system structure ofmassage robot control system,body mechanicalmechanism ofmassage robot and safety protection mechanism ofmassage robot.The future research and development direction of traditional Chinesemedicine massage robot is prospected,and the key technology issues to be studied in the future are discussed.
robot;Chinesemedicalmassage;acupoint location;movement control
TU996
A
1673-7644(2017)01-0060-09
2016-12-01
國家863計劃資助項目(2010AA040201);山東省科學技術發展計劃項目(2014GGX103002);山東省科技重大專項計劃項目(2015ZDXX0801A03)
魯守銀(1968-),男,教授,博士,主要從事智能控制與智能機器人系統等方面的研究.E-mail:sdznjqr@163.com
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
科技傳播(2019年22期)2020-01-14 03:06:54
電腦報(2019年40期)2019-09-10 07:22:44
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
汽車工程學報(2017年2期)2017-07-05 08:13:02