旋翼類飛行潛航器的發展及關鍵技術
2017-04-20 07:59:20馮金富廖保全李永利郭桃平
艦船科學技術 2017年3期
劉 安,馮金富,廖保全,李永利,郭桃平
(1. 空軍工程大學 航空航天工程學院,陜西 西安 710038;2. 中國人民解放軍 95380部隊,廣東 湛江 524000)
研究綜述
旋翼類飛行潛航器的發展及關鍵技術
劉 安1,馮金富1,廖保全1,李永利1,郭桃平2
(1. 空軍工程大學 航空航天工程學院,陜西 西安 710038;2. 中國人民解放軍 95380部隊,廣東 湛江 524000)
飛行潛航器(Unmanned Aerial Underwater Vehicle,UAUV)在水空搜救、水下結構物探測具有廣闊的應用前景。本文通過對主要飛行器、水下航行器的比較分析,認為多旋翼飛行器是目前技術條件下最適合水空 2 種環境使用的構型。綜述國內外主要旋翼類飛行潛航器(Multi-Rotor Unmanned Aerial Underwater Vehicle,MUAUV)的研究和發展現狀,分析旋翼類飛行潛航器的特點,論述飛行潛航器發展急需解決的關鍵技術。
旋翼;飛行;潛航;水空跨越
0 引 言
飛行潛航器又稱為跨介質飛行器、水空兩棲飛行器、潛水飛機和飛行潛艇等[1–4],是指能夠多次跨越水空界面且能持續航行,重復使用的新型航行器。它不同于潛射導彈、空投魚雷等單次水空介質“穿越”的航行器,不僅具有空中飛行能力和水下航行能力,而且具有連續多次自由穿越水空界面的能力。由于其廣闊的軍民用價值[2]已成為國內外研究的熱點。
受制于水空環境的巨大差異,選擇合適的機身結構是實現飛行潛航器的關鍵。據已有文獻記載,已使用過固定翼(見圖 1)、變后掠翼(見圖 2)、撲翼、四旋翼等多種形式。下面從飛行器結構、適用性等多方面分析現有航空器水下航行,現有水下航行器空中飛行的可行性。
固定翼飛機在發動機的推動下,借助流經機翼上下表面的穩定氣流產生的升力實現空中飛行。飛行過程平穩,續航能力較好,飛行效率高。固定翼飛行器具有優異的空中飛行性能,但提供升力的機翼嚴重阻礙了其水下航行。有研究提出了變后掠翼、折疊翼等方案[5–6],將機翼折疊收入機身,但需要設計復雜的機械結構。
直升機通過旋轉的旋翼產生克服飛機重力的升力,具有優異的垂直起降和懸停性能。直升機旋翼和傳動機構構造復雜,上千個活動部件通過復雜的機械結構連接在一起,使得直升機故障率高,維護性差。
傾轉旋翼飛機與固定翼相比,擁有較為復雜的傾轉機構,開發、維護、使用成本較高。傾轉旋翼飛機具備較好的操控性,具備垂直起飛、著陸和低空懸停性能。
多旋翼飛行器通過控制多個旋翼轉速進而調整旋翼產生的升力實現對飛行器飛行的控制,飛行穩定,操控性能好。盡管當前多旋翼是飛行器發展的熱門,但是多旋翼飛行器能量效率低,續航時間短,大量研究和開發的也只是一些小型多旋翼飛行器[8]。
飛艇是一種輕于空氣的飛行器。通常在巨大的氣囊內部填充密度比空氣小的氣體,現在使用較多的是氦氣。飛艇飛行過程能量消耗少,無噪聲干擾,能夠懸浮在空中。但是飛艇體積大,比空氣輕,很難應用于水下航行。
撲翼飛行器是一種模仿昆蟲或鳥類飛行的新型飛行器[9–10],控制靈活,低雷諾數下控制效率較高。撲翼飛行器負載能力較低,動力學模型復雜,撲翼的結構、材料還有待于進一步研究。
在水下航行器方面:一種是具有流線型外形的水下航行器,它們通常具有封閉的結構,類似魚雷或者潛艇的流線型外形。這類水下航行器負載能力較強,水下航行速度較高,能量消耗相對較大[11]。另一種是不具有流線型外形的水下航行器,這一類通常是遙控水下潛器,具有開放的結構,水下航行速度阻力大,航行速度小。這類航行器通常比飛行器甚至流線型水下航行器重很多,空中飛行難度較大。
通過以上分析,選出固定翼飛機、直升機、多旋翼飛行器、撲翼飛行器、水下航行器(主要指具有流線型外形的水下航行器,如魚雷、潛艇等),根據已有的研究[12]和經驗從空中飛行可控性、水下航行可控性、負載能力、續航能力、結構簡易程度、懸停性能、環境適應性能、空氣動力學建模、水動力學建模、附加質量(水)、水空跨越敏捷性、水空跨越可重復性、可維護性幾個方面進行量化評估,分數越高即航行器在該方面性能越好,評估結果如表 1 所示。
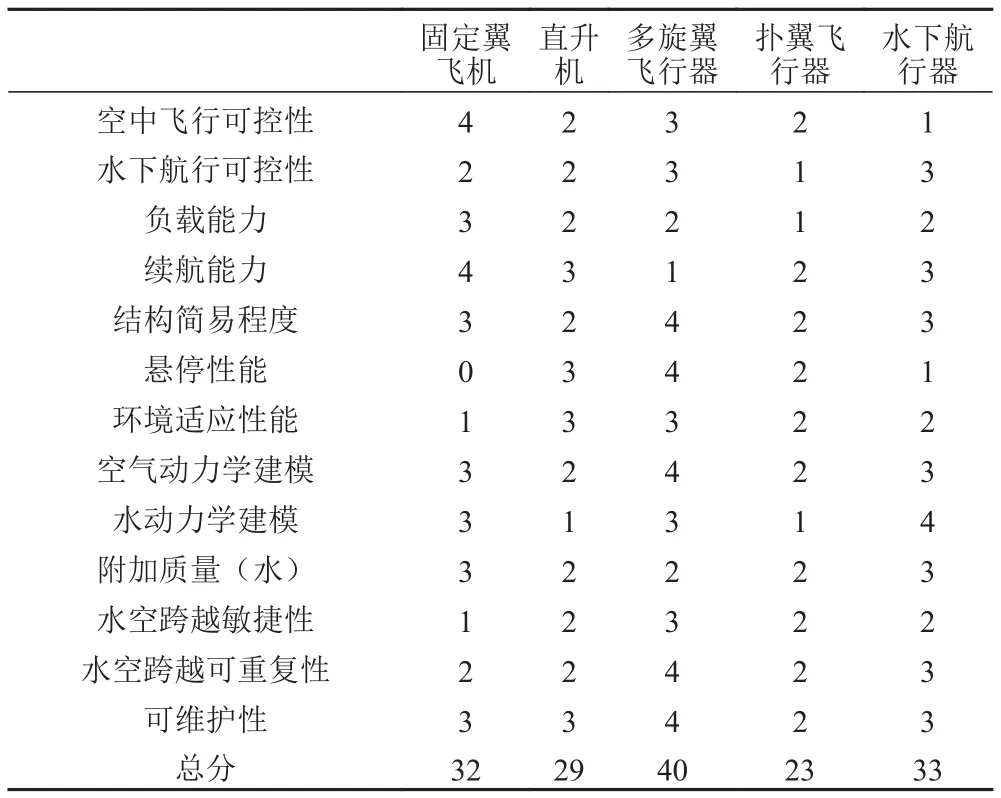
表 1 水、空航行平臺兩棲能力評估Tab. 1 Aquatic performance evaluation of common aircrafts and underwater vehicles
其中,環境適應性能是指航行器對發射(布放)、巡航、回收等使用過程中對場地自然環境及配套設施的要求;附加質量主要指航行器水下航行時,流體環境對航行器影響的度量,與流體物理特性、航行體外形、航行速度等有關;水空跨越敏捷性是指航行器在從空氣到水、水到空氣的準備時間。從以上評估可發現,多旋翼飛行器機械結構簡單、環境適應性好、有成熟的空氣動力學模型,是當前作為水空跨越航行器的最佳選擇。
1 旋翼類飛行潛航器的發展
近幾年以四旋翼為主的多旋翼無人機異軍突起,打破了直升機和固定翼飛機作為無人機領域的霸主局面。大疆、零度等新型科技公司開發的多旋翼飛控、多旋翼無人機一體機以其穩定的飛行性能和簡便的操縱性能,大大降低了航空攝影的難度和成本。
2014 年,一些航模愛好者制造出了幾種防水的多旋翼飛行器,較為經典的有國外工程師開發的 Mariner防水四旋翼[13],浙江大學學生錢晨輝制作的“不怕水的四旋翼”[14],泰國公司研制的 QuadH2O 防水四旋翼和 HexH2O 海面運動六旋翼[15]等。這些多旋翼不僅能夠在空中飛行,而且能夠降落在水面及從水面起飛,但它們并不能進行水下航行。
2014 年 9 月,Paulo Drews-Jr 提出了基于四旋翼平臺的無人兩棲航行器(Hybrid Unmanned Aerial Underwater Vehicle,HUAUV)[12]。該航行器使用 4 個 4 葉螺旋槳用于水下推進,4 個2葉空氣螺旋槳用于空中飛行(見圖11)。Paulo Drews-Jr 在分析多種飛行器結構之后認為,多旋翼是實現水空兩棲航行器的最佳結構。Paulo Drews-Jr 建立該航行器的仿真模型,并對水空跨越過程進行仿真,驗證了該結構在水空跨越飛行的可靠性。
2015 年,奧克蘭大學學者 Hamzeh Alzu’bi 研制出了基于四旋翼結構的水空兩棲航行器并嘗試通過單層的空氣螺旋槳實現空中和水下的驅動[16–17]。該航行器空中飛行和水下航行均使用單層螺旋槳,借助由水深傳感器和排注水變浮力裝置組成的深度控制系統調節航行器潛水深度。Hamzeh Alzu’bi 搭建了螺旋槳實驗平臺,對定距空氣螺旋槳氣動/水動性能進行了研究。通過仿真和試驗研究結果表明,空氣螺旋槳低速(約 180 r/min)水下工作時能夠滿足航行器水下機動的動力。Hamzeh Alzu’bi 最終選擇了 8 in 螺距為 3.8 in的定距空氣螺旋槳制造出了圖 12 所示的兩棲四旋翼進行相關試驗。經過多次改進之后,研制出圖 13 所示名為 Looncopter 的兩棲無人機。該研究團隊表示,Looncopter 可以為水上運動者提供水下視角,用于水下搜救或檢測。
同一年,羅格斯大學發布了在美國海軍資助下研制的“Naviator”(領航者)水空多旋翼兩棲航行器。Naviator 采用雙層共軸八旋翼設計,8 個旋翼均使用小尺寸的空氣螺旋槳,能夠較好地實現空中飛行、水下航行和水空無縫跨越[18]。限于水空通信障礙,Naviator通過電纜與水面的信號接收裝置連接在一起,羅格斯大學的研究者正考慮借助聲脈沖對 Naviator 實現無線控制。即使擁有 8 個旋翼,但由于旋翼尺寸較小,Naviator 飛行速度低、負載能力差也是研究團隊亟待攻克的難題。
空軍工程大學提出以四旋翼的“X”開放結構來滿足飛行潛航器的水下耐壓和空中飛行質量輕的要求;以雙層四旋翼布局使用上下層推力接力的方式完成飛行、潛航、水空跨越過程[19],并先后提出了 3 種機身結構方案(見圖15)。
方案 1 采用鋁合金機架,4 根鋁合金方管呈 90° 交叉布置,耐壓水密艙在機身下方,水空動力單元背向安裝;方案 2 采用碳纖維管機架,質量輕,強度高。上下層間距通過 4 根鋁合金立柱調整,水空動力單元同向布置;方案 3 采用 3D 打印機身,8 個懸臂從機身伸出整體成型,控制電路、元器件集中安裝在機身內,電路走線也在懸臂內,整體美觀。基于方案 1 研制水空兩棲飛行器使用超短波破解水空通信障礙,實現了淡水淺水域的無線通信,基于 Labview 搭建了飛行參數地面顯示系統。
2 旋翼類飛行潛航器的特點
旋翼類飛行潛航器結構簡單,不用依賴復雜的機械機構變形來適應水空環境。
旋翼類飛行潛航器入水相對容易,在出水時與其他類型的航行器動力“沖”出水面[20–21]相比,不要求具備較大的初始出水速度。但必須保證空氣螺旋槳完全處于空氣中,通過空氣螺旋槳的升力將航行器“拔”出水面。如果出水過程中,高速旋轉的螺旋槳一旦碰觸水面,將會使螺旋槳轉速驟然減小,導致航行器劇烈抖動、傾覆而出水失敗。為了保持航行器出水過程的穩定,研究人員想到了 2 種方式:一是奧克蘭大學研制的 Looncopter 兩棲無人機采用變浮力裝置對航行器所受浮力狀態進行調整,使航行器漂浮在水面;二是羅格斯大學的 Naviator 和空軍工程大學的四旋翼水空兩棲飛行器均采用雙層動力裝置,下層動力裝置保持航行器在水面處于有利的起飛姿態。
旋翼類飛行潛航器依靠旋翼提供水下和空中航行的動力,空中飛行時旋翼推重比要持續保持在1以上才能實現穩定的控制,空中使用能耗較高。水下航行處于中性浮力狀態時,動力推進效率較高,水下姿態調整靈活,適用于狹小區域。
3 關鍵技術與展望
從現有的旋翼類飛行潛航器來看,不管是 Naviator水空航行器還是四旋翼水空兩棲飛行器,這些航行器雖然能完整、重復實現空中飛行、入水跨越、水下航行、出水跨越全部過程,但離真正的實際應用還面臨很多挑戰。
3.1 水空跨越關鍵技術
進一步完善水空跨越機理、水空界面物理特性研究是實現平穩出水、入水的前提。出入水過程伴隨著空泡、沖擊等復雜的流固耦合現象,當前的研究僅僅建立在相對簡化模型的基礎上。理論上,要想建立精準的控制模型,實現對航行器的準確控制,水空跨越機理研究是其前提;技術上,不管是在水下航行器集成空中飛行能力,還是在飛行器上集成水下潛航本領都具有極大的開創性,都需要對水空跨越物理現象進行深入研究。
3.2 自主控制技術
無人系統的發展終將走向智能化方向,由于水空通信障礙,飛行潛航器的水下智能控制顯得尤為重要。高度智能化的飛行潛航器不僅僅能夠完成簡單的空中飛行、水下航行,還能夠根據環境和面臨的威脅自主決策水空跨越時機,自主完成水空跨越。
3.3 動力能源技術
續航時間短作為多旋翼飛行器的短板之一,嚴重限制了多旋翼飛行器的推廣使用。旋翼類飛行潛航器空中飛行時,自重大,旋翼效率低。增加續航時間,擴展飛行潛航器工作區域必須破解新型能源技術,開發高效率太陽能電池,氫燃料電池等新型燃料電池。
3.4 水空傳感器技術
飛行潛航器在飛行、潛航、跨越、執行任務等過程中需要精確的姿態反饋,每個控制動作的實現都嚴重依賴各種傳感器的可靠工作。由于工作環境的不同,飛行潛航器需要適應水空 2 種環境的傳感器,對傳感器小型化、低耗能、智能化提出了較高要求。新型傳感器、多傳感器信息融合等技術是航行器智能化的前提。
3.5 水空通信技術
復雜多變的水下環境,水介質對電磁波的衰減使得水下無線通信受到了極大的限制。實現高效率的信息交互必須把握有限的空中飛行時間,研究實時、高效的水空通信策略;研究微小型化的水聲通信設備,實現水下環境的遠距離高速通信。
3.6 多機編隊組網
單個旋翼類飛行潛航器負載能力、搜索范圍有限,面對復雜戰場環境難免因各種意外出現損傷而導致任務無法完成。多機組網可以完成單一航行器難以完成的任務,特別是在面對大面積海域探測、水文條件復雜等特殊條件下的任務,因此,多機組網編隊使用是未來的重要發展方向。編隊內信息共享,應對各種突發情況,有效提高系統冗余能力、生存率和任務完成效率。
4 結 語
飛行潛航器的研制和開發是一門集流體力學、結構力學、控制學科、材料學科等于一體的綜合性科學技術,具有極大的技術挑戰性和開拓性,同時也具有巨大的應用價值。旋翼類飛行潛航器是目前技術條件下僅有的能夠完成空中飛行、水下航行、水空跨越的航行器,但仍然面臨著控制模型粗糙,續航時間短,水下通信困難等技術難題。
[1]何肇雄, 鄭震山, 馬東立,等. 國外跨介質飛行器發展歷程及啟示[J]. 艦船科學技術, 2016, 38(9). HE Zhao-xiong, ZHENG Zhen-shan, MA Dong-li, et al. Development of foreign trans-media aircraft and its enlightenment to China [J]. Ship Science and Technology, 2016, 38(9).
[2]YANG X, WANG T, LIANG J, et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft: Aquatic unmanned aerial vehicle (AquaUAV)[J]. Progress in Aerospace Sciences, 2014, 74: 131–151.
[3]CROUSE G. CONCEPTUAL Design of a submersible airplane[C]// Aiaa Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition. 2015.
[4]WILLY N, Flying, World. Flying submarine[M]. 2011.
[5]FABIAN A, FENG Y, SWARTZ E, et al. Hybrid aerial underwater vehicle (MIT Lincoln Lab)[J]. 2012.
[6]廖保全, 馮金富, 齊鐸,等. 一種可變形跨介質航行器氣動/水動特性分析[J]. 飛行力學, 2016, 34(3). LIAO Bao-quan, FENG Jin-fu, QI Duo, et al. Aerodynamic and hydrodynamic characteristics analysis of morphing submersible aerial vehicle [J]. Flight Dynamics, 2016, 34(3).
[7]GILAD M, SHANI L, SCHNELLER A, et al., Waterspoutadvanced deployable compact rotorcraft in support of special operation forces[C]// Israel Annual Conference on Aerospace Sciences Haifa, Israel, 2008, (2): 27–28.
[8]全權. 解密多旋翼發展進程[J]. 機器人產業, 2015(2): 72–83. QUAN Quan. Decryption on the development process of multirotor aircraft [J]. Robot Industry, 2015(2): 72–83.
[9]CHEN Y, HELBLING E F, GRAVISH N, et al. Hybrid aerial and aquatic locomotion in an at-scale robotic insect[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. IEEE, 2015.
[10]MA K Y, CHIRARATTANANON P, FULLER S B, et al. Controlled flight of a biologically inspired, insect-scale robot.[J]. Science, 2013, 340(6132): 3–7.
[11]MARKS P. Undersea flyers: submarines that take to the skies[J]. New Scientist, 2010, 207(2767): 32–35.
[12]DREWS P L J, NETO A A, CAMPOS, M F M. Hybrid unmanned aerial underwater vehicle: modeling and simulation[C]// Ieee/rsj International Conference on Intelligent Robots and Systems. 2014: 4637–4642.
[13]ADMIN. Waterproof mariner quadcopter[ED/OL]. Best Quadcopter Reviews.org, 2014-11-23, http://www.bestquadcop terreviews.org/waterproof/.
[14]學生極客百度“擺陣” 不怕水四旋翼引熱議. 2014-06-04: http://www.chinaz.com/news/2014/0604/354160.shtml
[15]THE HEXH2O AND QUADH2O PROFESSIONAL WATERPROOF DRONES. https://www.quadh2o.com/
[16]ALZU'Bi H, AKINSANYA O, KAJA N, et al. Evaluation of an aerial quadcopter power-plant for underwater operation[C]// International Symposium on Mechatronics and ITS Applications. IEEE, 2015.
[17]KAJA N, AKINSANY O, AKINSANY O. Evaluation of a quad-rotor powerplant for dual-mode (Air and Underwater) operation Introduction[C]// IEEE - Sem Fall Conference. 2014.
[18]MAIA M M, SONI P, DIEZ F J. Demonstration of an aerial and submersible vehicle capable of flight and underwater navigation with seamless air-water transition[J]. 2015.
[19]王海晏, 吝科, 王領, 等. 一種水空兩用垂直跨越航行器: 中國, CN203318067U[P], 2013-12-04.
[20]譚紅明, 鄧海強, 周欲曉, 等. 潛射無人機發展現狀及其關鍵技術[J]. 南京航空航天大學學報, 2009, 41(b12): 1–5. TAN Hong-ming, DENG Hai-qiang, ZHOU Yu-xiao, et al. Development of submarine-launched UAV and its key technologies [J]. Journal of Nanjing University of Aeronautics & Astronautics, 2009, 41(b12): 1–5.
[21]MAJUMDAR D. U.S. navy launches UAV from a submarine [ED/OL]. 2013, U.S. naval institute news, https://news.usni.org/ 2013/12/06/u-s-navy-launches-uavsubmarine.
Progress and key technologies of multi-rotor unmanned aerial underwater vehicle
LIU An1, FENG Jin-fu1, LIAO Bao-quan1, LI Yong-li1, GUO Tao-ping2
(1. Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China; 2. No. 95380 Unit of PLA, Zhanjiang 524000, China)
Unmanned aerial underwater vehicles have a wide application prospects in the aeronautical and maritime search and rescue, underwater structure detection. Based on the comparison and analysis of the main aircrafts and the underwater vehicles, it is considered that the multi-rotor aircraft is the most suitable configuration for the water and air two environments. This paper summarizes the research and development status of the main multi-rotor unmanned aerial underwater vehicle at home and abroad, analyzes the characteristics of the MUAUV, and briefly discusses the key technologies for the development of the UAUV.
multi-rotor;fly;underwater;water-air transition
U674.941; V275
A
1672–7619(2017)03–0001–06
10.3404/j.issn.1672–7619.2017.03.001
2016–09–09;
2016–11–07
國家自然科學基金資助項目(51541905)
劉安(1982–),男,博士,講師,研究方向為武器系統與運用工程。
