一種基于多維標度的分簇迭代無線傳感器網(wǎng)絡定位算法
2017-04-25 04:00:20林吉李暉
數(shù)字技術與應用 2017年1期
林吉+李暉

摘要:本文提出了一種基于多維標度技術的分簇迭代定位算法LC-MDS。首先,在網(wǎng)絡中選取一個可定位簇,在簇內應用MDS技術,實現(xiàn)局部網(wǎng)絡中未知節(jié)點定位,然后將定位后的節(jié)點升級為偽錨節(jié)點,配合其他錨節(jié)點,進行迭代運算,直到網(wǎng)絡所有節(jié)點都成功定位。本文算法解決了因MDS距離矩陣過于龐大而導致的的計算繁瑣問題,定位精度優(yōu)于傳統(tǒng)算法MDS-MAP。
關鍵詞:多維標度;分簇迭代;無線傳感器網(wǎng)絡
中圖分類號:TN929.5 文獻標識碼:A 文章編號:1007-9416(2017)01-0125-02
在無線傳感器網(wǎng)絡中,傳感器節(jié)點多是被飛機、大炮等方式隨機拋灑至目標監(jiān)測區(qū)域,節(jié)點自組成網(wǎng),除了少數(shù)配備GPS模塊的錨節(jié)點可獲取自身的地理位置信息外,其他節(jié)點的地理位置未知。然而,無論是實現(xiàn)環(huán)境監(jiān)測、目標跟蹤等應用,確定觸發(fā)事件消息的來源,即節(jié)點定位是無線傳感器網(wǎng)絡應用實現(xiàn)的基礎前提[1]。目前,以多維標度技術為核心的的定位算法MDS-MAP,僅利用節(jié)點的關聯(lián)信息和少量的錨節(jié)點位置信息,就可同時對多點定位,然而,MDS-MAP采用集中式其計算方法,計算復雜,通信代價高,能耗較大,本文針對問題提出改進算法LC-MDS。本文組織如下:第1節(jié)介紹相關研究工作,第2節(jié)詳細介紹LC-MDS算法,第3節(jié)進行仿真分析,并總結全文。
1 相關研究工作
1.1 經(jīng)典多維標度技術
多維標度(簡稱MDS)是一種將數(shù)據(jù)關系表示成幾何圖形加以研究的數(shù)據(jù)分析技術[2],在無線傳感器網(wǎng)絡中,可利用它計算節(jié)點的相對坐標。MDS生成節(jié)點的相對坐標的具體實現(xiàn)方法如下:已知n個傳感器節(jié)點的坐標:X={x1,x2,..,xn},和它們間n維對稱距離矩陣:D=[dij]n×n,1≤i≤n, 1≤j≤n。首先,計算距離平方相似度矩陣D(2)=[D2],求矩陣D(2)的雙中心形式:H=-(1/2)JD(2)J,其中J=I-e*eT/n,e=(1)1×n,I=[1]n×n。然后,提取H的前k個特征值并從小到大排列成對角矩陣:Uk=diag(λ1,λ2,…,λk),對應的k個特征向量構成:Vk=[e1,e2,…,ek],那么,H=UkVkUkT,H還可以表示成:H=XXT。最后,將關于H的這兩個表達式聯(lián)立計算,可得到這n個節(jié)點在k維空間的坐標解:Xk=VkLk1/2,其中Lk1/2為k個特征值構成的對角陣的開平方。
1.2 絕對坐標變換原理
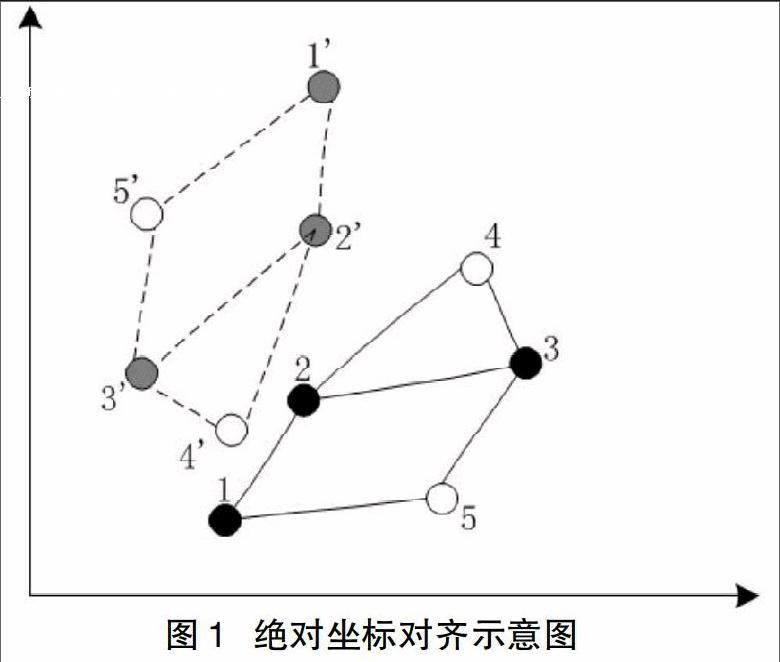
使用多維技術計算出節(jié)點相對坐標后,要利用分布式定位方法把相對位置對齊到物理位置,對齊過程包括移動、旋轉和坐標反射,在二維情況中,至少需要三個位置已知的節(jié)點,這些傳感器節(jié)點可以是錨節(jié)點,也可以是通過計算獲知自身物理位置的節(jié)點,通過確定三個位置已知的節(jié)點從相對位置到物理位置的轉換規(guī)律[3],可以將其他節(jié)點對齊到物理位置,如圖1所示:節(jié)點1、2、3、4、5為物理位置,其中1、2、3為錨節(jié)點。1、2、3、4、5為相對坐標位置,通過把1、2、3對其到物理位置1、2、3,節(jié)點4、5也可以對齊到物理位置。
2 LC-MDS算法
設一個二維無線傳感器網(wǎng)絡由m+n個節(jié)點構成,其中錨節(jié)點集合為A={ax},x=1-->m,未知節(jié)點集合為U={uy},y=1-->n,每個節(jié)點擁有唯一的ID,信號功率發(fā)射半徑為R,節(jié)點i通信范圍內的其他節(jié)點稱為節(jié)點i的鄰節(jié)點,記為集合Ni。
2.1 拓撲感知
通過節(jié)點間的信息交換可以實現(xiàn)節(jié)點對周圍的拓撲環(huán)境的感知,流程如下:
(1)源節(jié)點洪泛查詢分組。分組內容包括消息源節(jié)點序號S_ID,跳數(shù)值H,初始化為0,當前轉發(fā)節(jié)點F_ID,初始化為null。(2)鄰節(jié)點收到該分組,同時查詢本是否存在該分組,若不存在,保存該分組,并繼續(xù)轉發(fā)。若存在,將H+1,再與本地記錄的跳數(shù)值比較:大于,丟棄該分組;小于,替換本地記錄;等于,對比F_ID:若相同,丟棄該分組,若不同,保存該分組。(3)節(jié)點融合本地的已保存分組,提取路由節(jié)點的序號,跳數(shù)和個數(shù)信息,并將這些信息廣播。
2.2 分簇迭代
遍歷錨節(jié)點信息,尋找任意3個錨節(jié)點的共同鄰居節(jié)點ui,若存在,將ui及其鄰居節(jié)點作為簇成員,將這3個錨節(jié)點中具有最小ID的錨節(jié)點作為簇首;若不存,則尋找兩個錨節(jié)點的共同鄰居節(jié)點uj,再選取第三個錨節(jié)點使得它到這兩個錨節(jié)點的距離和最短,簇首和簇成員的選擇方法同上。簇首和簇成員構成局部網(wǎng)絡簇。分簇后,簇首利用MDS算法將簇內節(jié)點映射到相對位置,再根據(jù)簇內錨節(jié)點的已知物理坐標和映射規(guī)律,將未知節(jié)點對齊到物理位置。已定位的未知節(jié)點升級為偽錨節(jié)點,重復以上步驟,直到整個網(wǎng)絡節(jié)點都成功定位。
3 算法仿真與分析
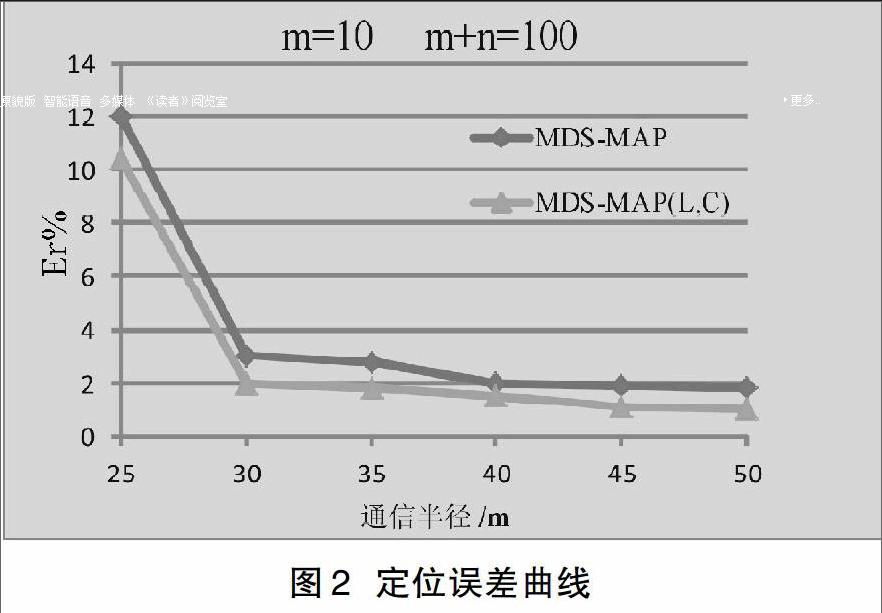
定義定位誤差為:,在matlab仿真平臺下, 在100m×100m的方形區(qū)域里,隨機產(chǎn)生100個節(jié)點,其中錨節(jié)個數(shù)m=10,定位誤差曲線見圖2所示:定位精度隨著通信半徑的增大提高,后趨于穩(wěn)定,相比于MDS-MAP算法,對本文算法可將精度提高9%左右。計算復雜度由O(n3)下降到 kO(p3),其中k為網(wǎng)絡分簇的個數(shù),p為平均簇內的節(jié)點個數(shù),p遠小于n。
參考文獻
[1]彭宇,王丹.無線傳感器網(wǎng)絡定位技術綜述[J].電子測量與儀器學報,2011, 25(5):389-399.
[2]王博.無線傳感器網(wǎng)絡基于多維標度定位算法的研究[D].沈陽:遼寧大學,2014.
[3]屈劍鋒,郭茂耘.一種基于錨節(jié)點分簇的傳感器網(wǎng)絡節(jié)點定位方法[J].計算機應用研究,2011(9):3470-3473.
