基于雙模MPPT控制的光伏充電設計
2017-04-25 03:55:18韓騰飛楊明發
電氣技術 2017年4期
韓騰飛 楊明發
?
基于雙模MPPT控制的光伏充電設計
韓騰飛 楊明發
(福州大學電氣工程與自動化學院,福州 350116)
本文提出一種光伏充電設計方案,在不同的光照強度下,采用不同模式的最大功率點跟蹤方法(MPPT)來控制光伏電池板的輸出特性。強光照時,MPPT采用變步長電導增量法,對鋰電池和超級電容充電;弱光照時,不能對鋰電池直接充電。MPPT采用擾動觀察法,對超級電容充電,超級電容蓄能后對鋰電池進行充電。本文設計基于MSP430F5132的控制系統平臺進行實驗驗證,結果表明,能夠高效地利用太陽能對鋰電池進行充電。
MPPT;鋰電池;超級電容;充電
光伏電池可以將太陽能轉成電能,其輸出伏安特性曲線具有非線性,最大功率點隨著光照強度和溫度的變化而不同,為了提高光伏電池的利用率,需要采用最大功率點跟蹤方法(MPPT)來控制其輸出特性。
早晨和傍晚或是陰天的時候,光照強度較低,光伏電池無法為鋰電池充電;晴天中午時刻,光照強度高,光伏電池輸出能量充足。本文提出采用擾動觀察法和電導增量法雙模MPPT控制方案對鋰電池進行充電,對光照強度高的時段“精益求精”,追求太陽能功率的最大利用;對光照強度低的時段,高精度的MPPT方案效益不高,則放棄使用復雜的控制方案,降低MSP工作頻率,減少功耗,利用超級電容收集微弱的太陽能。
1 光伏電池陣列數學模型
對于工程應用的太陽能電池,可以將其看成由若干個單個太陽能電池單元的串并聯而成,單個硅型太陽能電池單元的等效電路模型如圖1所示,在圖1中D表示等效二極管,sh表示等效旁路電阻,s表示等效串聯電阻,o表示電池的外接負載電阻。
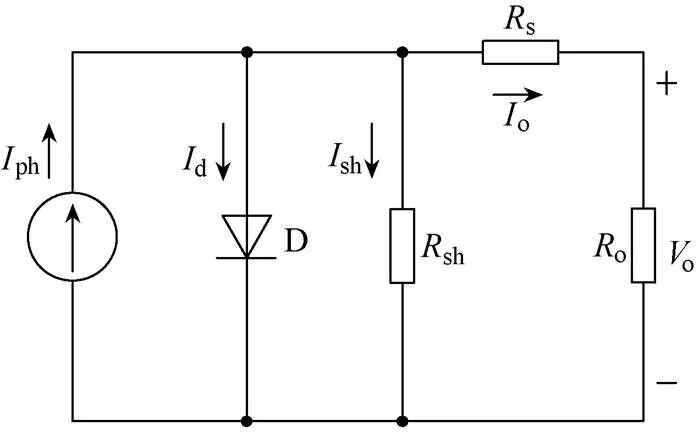
圖1 光伏電池等效電路模型
該數學模型的函數關系如下:
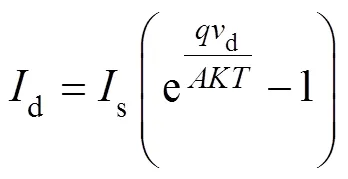
(2)
d=o+os(3)

式中,s為太陽能電池內部等效二極管P-N結反向飽和電流;ph為光生電流;d為等效二極管的端電壓;為電子電荷量;為玻爾茲曼常量;為絕對溫度;為P-N結的曲線常數。
由式(1)至式(4)可知,光伏電池輸出具有非線性,任一個溫度和光照強度都對應一個最大輸出功率點(MPP)。通過最大功率點跟蹤技術(MPPT)調節直流母線電壓,控制外電路阻值與光伏電池內阻匹配,即可使光伏電池工作在最大功率點。圖2為光伏電池輸出特性曲線圖。本文主要研究不同光照強度下光伏電池的輸出特性,所以設定溫度為標準值25℃。
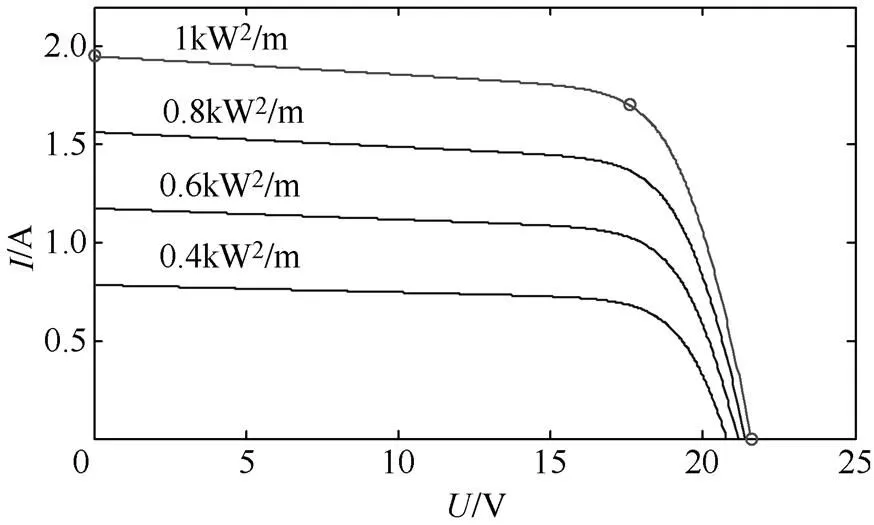
(a)電壓-電流特性曲線
(b)電壓-功率特性曲線圖
圖2 光伏電池輸出特性
2 MPPT算法分析
2.1 變步長電導增量法
電導增量法是通過觀測比較太陽能電池板輸出電壓和輸出功率之間的關系推導出瞬時電導和電導變化量來調整工作點的電壓,使之逐漸接近最大功率點電壓,從而實現最大功率跟蹤的。該算法能夠快速跟蹤光照強度的變化,控制精度較高。
當光伏電池輸出功率達到最大時,根據光伏輸出特性曲線,可得
(6)
傳統電導增量法擾動步長固定,而擾動步長大小決定了系統的跟蹤速度。選用較大的擾動步長可提高跟蹤速度,但到達最大功率點附近時波動較大,穩態功率損失較多;較小的擾動步長可提高穩態跟蹤精度,但跟蹤速度較慢。
變步長電導增量法的擾動步長為
式中,為比例系數,可通過實驗獲得。
|d/d|的變化曲線如圖3所示。擾動步長在遠離最大工作點的區域取值較大,系統工作點越靠近最大功率點時步長越小,并在最大功率點處變為0。

圖3 光伏陣列P-U和|dP/dU|-U曲線
變步長電導增量法的參考電壓更新規則為

式中,ref()和ref(-1)分別為時刻和-1時刻的參考電壓值;為參考電壓擾動變步長。
2.2 擾動觀察法
擾動觀察法的控制思想是:周期性地以一定步長擾動太陽能電池的輸出電壓,計算擾動后光伏電池的輸出功率,比較擾動前后光伏電池的輸出功率的變化D,如果D>0,則繼續保持原方向擾動;如果D<0,則改變擾動方向。不斷循環,光伏電池的工作點就可以逐漸逼近當前最大功率點,最終在最大功率點附近的小范圍內振蕩。
擾動觀察法算法簡單,被測參數少,易于實現,但響應速度較慢,光照變化時容易損失部分能量。
擾動觀察法的參考電壓更新規則為

式中,ref()和ref(-1)分別為時刻和-1時刻的參考電壓值;D為參考電壓擾動步長。
3 MPPT雙模控制策略分析
變步長電導增量法的步長調整依賴于|d/d|值的大小,但是通過圖4可知,|d/d|曲線在不同光照條件下差異較大,無法找到一組最優的速度因子同時滿足不同光照條件下的最大功率跟蹤需求,即不同光照下存在跟蹤死區。

圖4 不同光照條件下|dP/dU|曲線
分析變步長電導增量法和擾動觀察法的優缺點,見表1。

表1 兩種MPPT方法的優缺點
針對以上問題,本文提出采用雙模MPPT切換控制的方案:
在強光照時,太陽能量充足,采用變步長電導增量法,通過調整比例系數,使得擾動步長為在強光照條件下的最優值。此時MPPT跟蹤精準,最大功率點處振蕩小,最大化利用太陽能。
在弱光照時,太陽能量較低,高精度的最大功率跟蹤所能利用的能量有限,此時采用擾動觀察法,處理器的工作頻率降低,功耗減少。
目前常用的鋰電池和超級電容的混合儲能,一般是先將鋰電池中的能量轉存到超級電容中,然后利用超級電容作為瞬間驅動源;或是利用超級電容的特性,削減負載突變對鋰電池的沖擊,提高系統的動態響應。
本設計引入超級電容蓄能,在弱光照的情況下收集太陽能,形成大電流給鋰電池充電。
本設計以光伏輸出能否維持鋰電池恒流恒壓充電為光照強弱的判斷依據。強光照時,光伏電池直接對鋰電池充電,弱光照時,光伏電池對超級電容充電,超級電容蓄能為鋰電池充電。
4 電路拓撲分析
4.1 強光照時的工作回路
強光照時,光伏電池直接對鋰電池進行充電,工作電路如圖5所示,前端BOOST電路實現MPPT控制,后端BUCK電路采用PI控制實現對鋰電池恒流恒壓充電。

圖5 光伏-鋰電池充電回路
在Matlab/Simulink中建模仿真,光照強度按照→→(對應的MPP:19.98W→11.82W→15.89W)變化,MPPT采用變步長電導增量法。
如圖6所示,變步長電導增量法能快速地跟蹤到最大功率點,并且使光伏電池工作點保持在最大功率點,功率振蕩小,減少能量損失。
鋰電池充電仿真數據較多,為減少仿真時間,僅對充電初期和充電末期進行仿真。在充電期間,光照強度也按照→→變化。
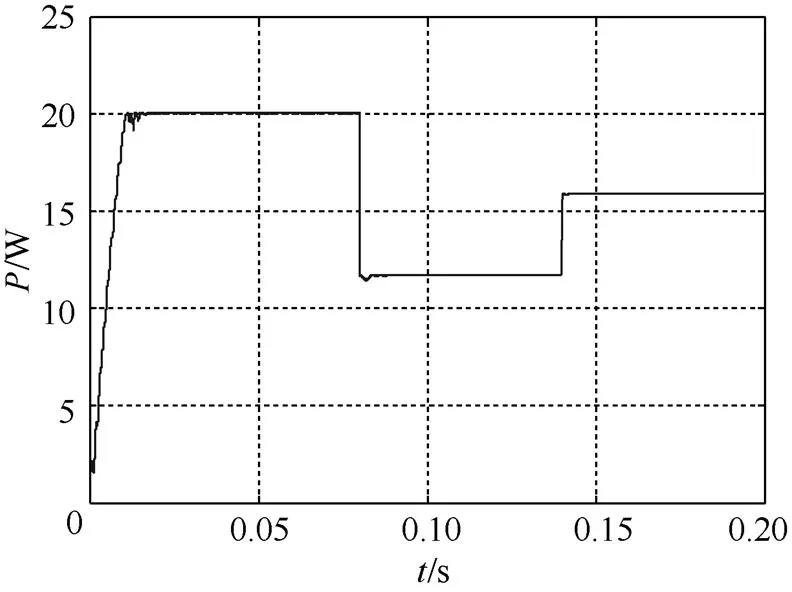
圖6 變步長電導增量法
如圖7所示,在光照強度變化的情況下,PI控制能夠實現鋰電池恒流恒壓充電功能。

(a)充電初期
(b)充電末期
圖7 鋰電池充電波形
4.2 弱光照時的工作回路
弱光照時,光伏電池輸出達不到鋰電池恒流恒壓充電的要求,此時系統工作方案切換為光伏電池對超級電容充電,MPPT采用擾動觀察法。
如果采用BOOST電路直接對超級電容充電,超級電容電壓低于光伏電池輸出電壓時BOOST電路將不能正常工作,光伏電池通過電感和二極管直接給超級電容充電,電感很快會飽和。同時,由于光伏電池輸出電壓被鉗位在低電壓,這一段也將不能實現光伏電池的最大功率點跟蹤功能。
在Matlab/Simulink中建模進行仿真,光照強度按照→→(對應的MPP:7.78W→5.76W→3.78W)變化,結果如圖8所示,系統無法實現最大功率跟蹤功能。

圖8 最大功率跟蹤失效
改進后的超級電容充電回路如圖9所示。Q1和Q2保持同步,同時關斷時,光伏電池向轉存電容充電;同時開通時,光伏電池對電感充電,轉存電容向超級電容充電。

圖9 改進后光伏-超級電容充電回路
按照同樣的條件仿真,結果如圖10所示,系統能夠實現最大功率跟蹤功能。
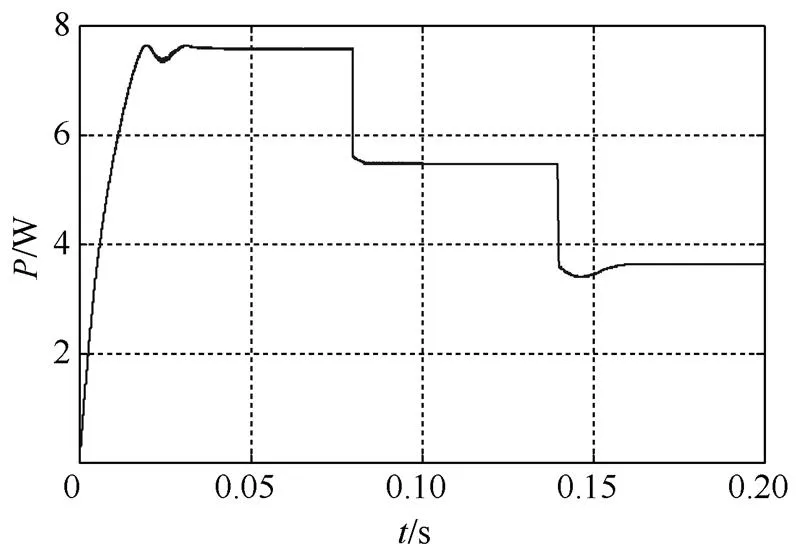
圖10 最大功率跟蹤有效
選用16V/16F的超級電容進行仿真,超級電容充電電壓和荷電狀態()如圖11所示。超級電容被不斷充電至額定電壓。

圖11 超級電容端電壓和SOC
超級電容儲存的能量通過BUCK變換器對鋰電池進行恒流恒壓充電。圖12中,超級電容的電壓和下降,鋰電池處在恒壓充電階段,不斷上升。

(a)超級電容放電電壓和SOC
(b)鋰電池充電電壓和SOC
圖12 超級電容-鋰電池充電波形
4.3 設計整體電路
強光照時,光伏電池對鋰電池和超級電容充電,Q3工作,Q4關斷;弱光照時,鋰電池無法實現恒流恒壓充電,此時Q3關斷,Q4工作,超級電容對鋰電池進行恒流恒壓充電。

圖13 整體電路
5 實驗驗證
5.1 MPPT測試實驗
采用60V直流穩壓電源串聯可變阻值的滑動變阻器來模擬光伏電池的輸出特性,對MPPT功能進行測試。
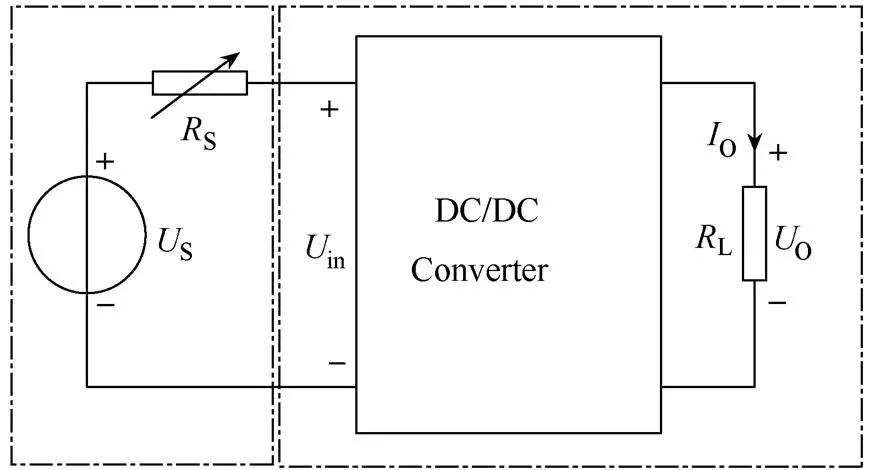
圖14 MPPT模擬測試
根據戴維南定理的等效可知:當變換器的輸入電壓為直流穩壓電源電壓S的一半,即實現了最大功率輸出。
模擬光照強度增大,穩壓源電壓S由17V變為30V,對應的變換器輸入電壓由8.5V變為15V。
如圖15和圖16所示,擾動觀察法和變步長電導增量法均能實現最大功率跟蹤功能,但變步長電導增量法在最大功率點處振蕩小,跟蹤速度和精度方面都優于擾動觀察法。

(a)擾動觀察法
(b)變步長電導增量法
圖15 MPPT波形圖1

(a)擾動觀察法
(b)變步長電導增量法
圖16 MPPT波形圖2
模擬光照強度減小,穩壓源電壓S由30V變為17V,對應的變換器輸入電壓由15V變為8.5V。
5.2 超級電容測試實驗
采用220mF轉存電容、16V/16.6F超級電容組和12V/2Ah鋰電池組(由3節3.7V鋰電池串聯),對超級電容充放電情況進行測試。
如圖17和圖18(a)所示,轉存電容不斷充放電,超級電容被充電至額定16V。
超級電容為電壓為初始電壓10V的鋰電池充電,如圖18(b)所示超級電容放電至10V截止。

圖17 轉存電容端電壓

(a)充電電壓
(b)放電電壓
圖18 超級電容充放電波形
5.3 工作模式切換測試實驗
開關管Q3和Q4除了實現對鋰電池進行恒流恒壓充電的控制,還實現工作模式切換的功能,切換思路為:①光伏電池直接對鋰電池和超級電容充電,Q3工作,Q4關斷;②超級電容對鋰電池充電,Q4工作,Q3關斷;③超級電容放電結束,切換回工作狀態①。
測試工作狀態①切換為工作狀態②,如圖19所示,Q3由工作狀態切換為關斷狀態,Q4由關斷狀態切換為工作狀態。
5.4 鋰電池充電實驗
光伏電池板參數:峰值功率30W,工作電壓17.6V,工作電流1.71A,開路電壓21.6V,短路電流1.95A。

圖19 工作模式切換波形
鋰電池充電情況如圖20所示。其中在55min、95min、135min、175min的采樣時間點遮擋光伏電池,模擬弱光照情況,圖20(a)為本設計的充電方案,充電電流保持穩定;圖20(b)為傳統的充電方案,光伏電池輸出為鋰電池充電,在弱光照的情況下,充電電流急劇下降。

(a)充電電流1
(b)充電電流2
圖20 鋰電池充電波形
由此可知,當間斷出現烏云飄過遮蔽情況時,傳統的充電方案令鋰電池充電時間延長。而加入超級電容蓄能后,出現遮蔽弱光照時向鋰電池充電,鋰電池能夠保持恒流恒壓充電狀態。超級電容的加入能夠充分利用太陽能,保證鋰電池的充電速度。
6 結論
本設計根據光伏電池在強弱光照下的不同特性,采用雙模MPPT控制策略,實驗表明,采用變步長電導增量法時跟蹤速度快,精度高,太陽能利用效率高,采用擾動觀察法時降低了MSP的工作頻率,減少功耗。在弱光照時,采用超級電容收集能量,能夠提高對太陽能的利用效率。
[1] 余南華, 王岳人, 楊毅. 太陽能車電力系統的智能集成化設計[J]. 可再生能源, 2006(2): 7-9, 12.
[2] 王新運, 康龍云. 太陽能電動車最大功率跟蹤器的研究與開發[J]. 電力電子技術, 2010, 44(3): 12-13, 19.
[3] F Blaabjerg C Z, Jaer S B. Power electronics efficientinterface indis Persed Powergeneration systems, IEEE Trans[J]. Power Electron, 2004, 19(5): 1184.
[4] 周其進, 王冰. 基于MC9S12的車載智能光伏充電器的設計[J]. 計算機測量與控制, 2010, 18(4): 868- 870, 874.
[5] 張永賢, 潘林. 超級電容儲能器在光伏發電系統中的應用[J]. 控制工程, 2016, 23(7): 997-1000.
[6] Brunelli D, Moser C, Thiele L, et al. Design of a Solar-Harvesting circuit for batteryless embedded systems[J]. IEEE Transactions on Circuits and Systems I-Regular Papers, 2009, 56(11): 2519-2528.
Design of Photovoltai Charging based on Dual-mode MPPT
Han Tengfei Yang Mingfa
(College of Electrical Engineering and Automation, Fuzhou University, Fuzhou 350116)
A design of photovoltai charging is proposed. Different modes of Maximum Power Point Tracking (MPPT) is adopted to control the output characteristics of PV in different sunlight intensity. During the strong sunshine, variable step incremental conductance algorithm is adopted for lithium batteries and super capacitor charging; During the weak sunshine, perturbation and observation algorithm is adopted for the super capacitor charging. Lithium battery is charging by the energy stored in the super capacitor. The design is achieved bythe system based on MSP430F5132, the results show that the design can efficiently use solar energy to charge lithium batteries.
MPPT; lithium battery; super capacitor; charging
韓騰飛(1990-),男,碩士研究生,研究方向為電機電器及其系統智能化與在線檢測技術。