基于Matlab的無刷直流電動機驅動系統仿真建模
2017-04-27 01:36:51張健王笑竹
四川輕化工大學學報(自然科學版) 2017年2期
關鍵詞:系統
張健, 王笑竹
(營口理工學院, 遼寧營口115014)
基于Matlab的無刷直流電動機驅動系統仿真建模
張健, 王笑竹
(營口理工學院, 遼寧營口115014)
基于Matlab/Simulink工具搭建無刷直流電機驅動系統仿真平臺,分別建立直流無刷電機的本體模型和驅動控制模型,詳細介紹了系統中各個子模塊的搭建方式和實際功能,為分析驅動控制算法和策略可行性提供有效的仿真環境。通過實驗仿真曲線特征和變化規律,實現了驅動系統各項性能評價指標和PID參數整定的驗證,模型參數也為實際電機控制系統的設計和調試提供支撐。系統模型具有很好的靈活性和通用性,在此基礎上通過簡單的替換和修改就可以搭建和仿真使用其他控制算法和控制策略的仿真模型,為模糊控制、模糊PID控制和再生制動控制策略建立仿真環境提供參考,減少驗證過程中的工作量。
無刷直流電動機;驅動系統;反電動勢過零檢測;仿真分析
引言
長期以來,隨著無刷直流電機的應用日趨廣泛,其控制算法和控制策略也越來越豐富,國內外學者就此做了深入研究,并取得豐碩的成果。其中反電動勢法、續流二極管法、狀態觀測器法及鎖相環法是當前的熱點問題[1-2],但是缺少對這些方法的驗證環境和評價體系,這在一定程度上限制了控制算法和策略的改進。因此建立簡單精確的仿真模型成為目前亟待解決的問題[3-5]。
為了便于評價分析和驗證各種控制算法和策略,有必要對各種無刷直流電機驅動系統進行正確的建模和仿真,以此作為驅動系統可行性和性能評價的依據,基于Matlab/Simulink搭建無刷直流電機驅動系統各項性能評價指標和PID參數整定的驗證仿真平臺,為實際電機控制系統的設計和調試提供支撐。
1無刷直流電動機數學模型
預建立無刷直流電機的數學模型,需要在合理的理想條件范圍內對其進行必要的簡化[6-8]。
電壓平衡方程式可表示為:
(1)
式中:uX、eX、iX、RX、LXX和LXY分別為三相定子相電壓、反電勢、相電流、相電阻、繞組自感和繞組互感,P為微分算子。因在三相對稱的電機中存在:ia+ib+ic=0,LXX=L,LXY=M,RX=R,故有Mia+Mib+Mic=0,則式(1)經整理可得:
(2)
無刷直流電動機的運動方程可寫為:
(3)
(4)
其中:ω為電機的角速度;Pn為電機的磁極對數;Te為電機電磁轉矩;TL為電機的負載轉矩;B為粘性阻尼系數;J為電機的轉動慣量。
2無刷直流電動機仿真建模
2.1無刷直流電動機本體的建模
電機本體是整個系統的核心,系統以模塊式搭建,功能彼此獨立每個模塊構成一個有機整體,實現電機本體仿真平臺[9-11]。
(1)電壓方程模塊
根據電壓方程可搭建電機電壓方程模塊,如圖1所示。
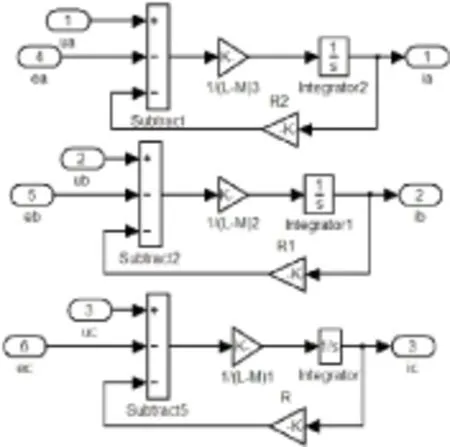
圖1電壓方程模塊
(2)電機反電動勢模塊
反電動勢模塊采用分段線性查表法[12],其仿真結構如圖2所示。
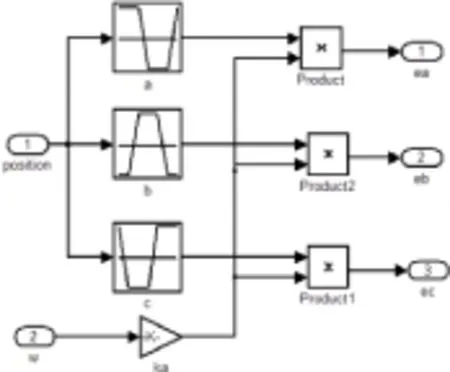
圖2反電動勢模塊及其封裝
圖2中,反饋回來的轉子位置信號position(范圍為0~2π)經過LookupTablet模塊,與轉速信號增益后分別相乘,得到三相繞組的反電動勢。其中LookupTablet模塊是完成查表法的關鍵環節[13-15]。
(3)電機轉矩計算模塊
由式(3)和式(4)很容易得到電磁轉矩與轉速模塊,如圖3所示。轉子位置檢測模塊如圖4所示。
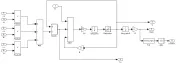
圖3電機轉矩計算模塊

圖4轉子位置檢測模塊
建模完成后,就可以通過適當的鏈接完成電機本體總模型的建模,各環節的鏈接及電機本體的總模型如圖5所示。
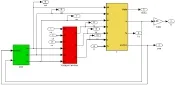
圖5電機本體的總模型
2.2無刷直流電動機驅動系統建模
利用Matlab7.0 的Simulink模塊對無刷直流電機驅動系統進行建模,建立的整體驅動系統如圖6所示。
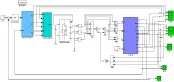
圖6無刷直流電機驅動系統模型
無刷直流電機驅動仿真系統的工作原理可簡要介紹為:預定的轉速信號(n-ref)與實際轉速信號n進行比較,求其偏差e,經PID控制器計算得電流幅值信號Is,參考電流模塊(referencecurrent)利用PID控制器輸出的電流幅值信號Is和反饋的轉子位置信號(position)計算三相繞組各自的參考電流iar、ibr、icr,然后經電流滯環控制模塊(CurrentController)實現各相實際電流ia、ib、ic對參考電流iar、ibr、icr的滯環跟蹤,輸出PWM逆變器控制信號(Pulse),用于控制逆變器模塊(MOSFETDiode)的導通和關斷,從而產生驅動電機的輸入相電壓ua、ub、uc,同時在給定時間對電機施加給定的負載轉矩tl,利用示波器觀察各相電流(i_abc)、各相反電動勢(emf)、電磁轉矩(Te)、轉過角度及轉子位置(theta)和轉速(n),并反饋給前面的模塊作為反饋信號,實現閉環控制。
(1)速度控制模塊
BLDC驅動系統的速度環控制由速度控制模塊實現,其結構如圖7(a)所示。速度控制采用PID控制器實現,轉速預設值(n_ref)與反饋回來的實際轉速信號(n)求其差值e,輸入PID控制器作為其輸入,經PID算法計算后輸出電流幅值信號Is,作為參考電流模塊的輸入信號。離散PID控制器的內部結構如圖7(b)所示。
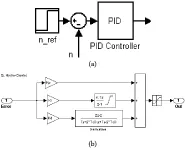
圖7速度控制模塊
(2)參考電流模塊
如圖8所示,參考電流模塊根據PID控制器輸出的電流幅值信號(Is)和反饋回來的轉子位置信號(position)作為參考電流iar、ibr、icr完成電流滯環控制。
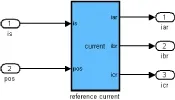
圖8參考電流模塊
參考電流模塊的代碼為:
依照野生觀賞植物的形態特征與觀賞部位將觀賞植物分為觀花類、觀果類、觀葉類、觀形類4類,由于某些植物的觀賞特性極為豐富,故該4種觀賞特性沒有固定的界定標準。
function[iar,ibr,icr] =current(is,pos)
%ThisblocksupportsanembeddablesubsetoftheMATLABlanguage.
%Seethehelpmenufordetails.
iar=is;
ibr=-is;
icr=0;
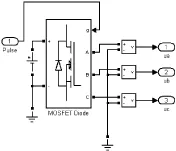
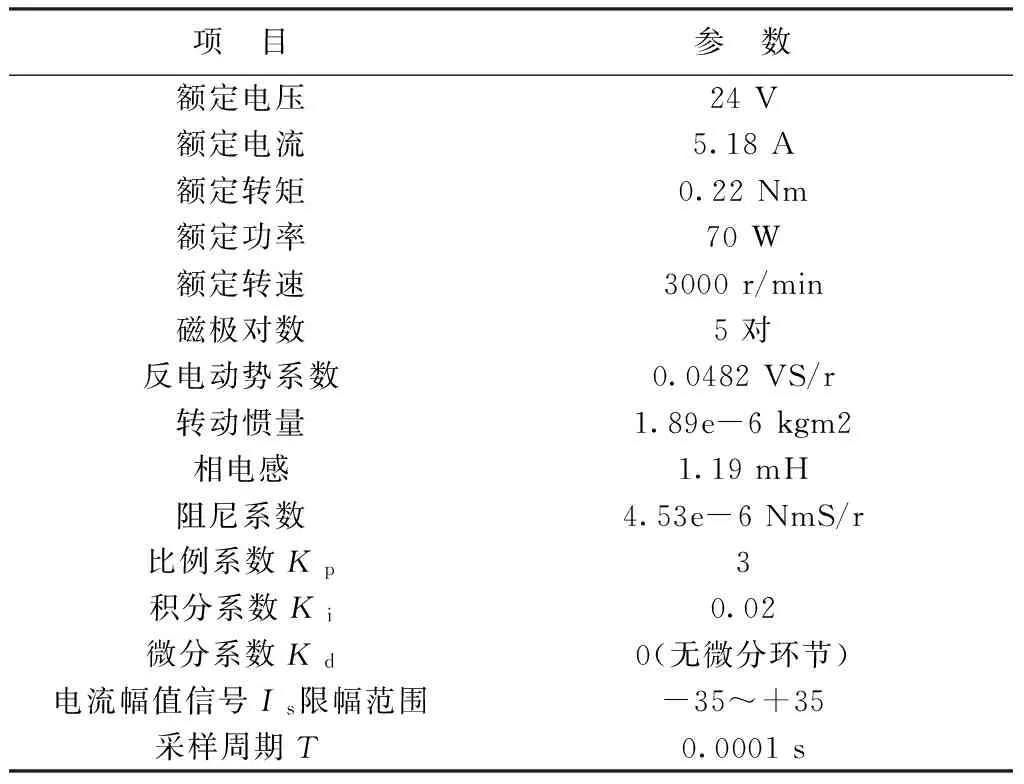
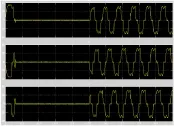
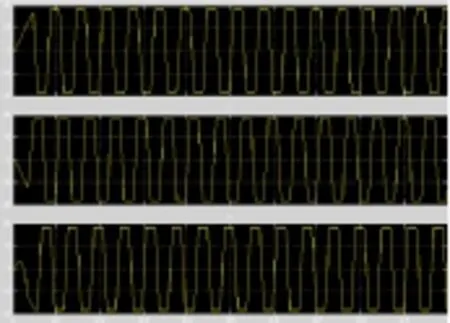
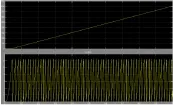
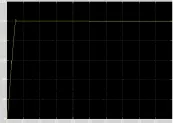
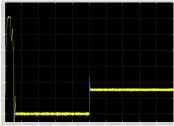
if(pos>=0&&pos iar=is;ibr=-is;icr=0; elseif(pos>=pi/3&&pos<2*pi/3) iar=is;ibr=0;icr=-is; elseif(pos>=2*pi/3&&pos iar=0;ibr=is;icr=-is; elseif(pos>=pi&&pos<4*pi/3) iar=-is;ibr=is;icr=0; elseif(pos>=4*pi/3&&pos<5*pi/3) iar=-is;ibr=0;icr=is; elseif(pos>=5*pi/3&&pos<=2*pi) iar=0;ibr=-is;icr=is; end (3)電流滯環控制模塊 如圖9所示,電流滯環控制模塊(CurrentController)實現各相實際電流ia、ib、ic對參考電流iar、ibr、icr的滯環跟蹤,輸出PWM逆變器控制信號(Pulse)。 圖9電流滯環控制模塊 (4)電壓逆變器模塊 采用SimPowerSystems工具箱的直流電源模塊(DCVoltageSource)和全橋模塊(UniversalBridge),其中全橋模塊選擇橋臂數為3個,功率器件為MOSFET,電流滯環控制模塊輸出的PWM波形(Pulse)控制MOSFET的導通與關斷,從而實現對無刷直流電機的三相全橋控制,如圖10所示。 圖10電壓逆變器模塊 由于SimPowerSystems里的模塊不能直接相連Simulink里的模塊,因此,全橋模塊(UniversalBridge)與電機本體模塊之間加上了三個受控電壓源,實現兩者的連接。 選用的電動機為57BL系列,仿真參數可依照所選用的電動機說明書設置,見表1。 表1電機參數 仿真過程中,繞組電流、反電動勢、位置信號和轉速、轉矩波形圖如圖11~圖15所示。 圖11繞組電流仿真波形圖 圖12繞組反電動勢仿真波形圖 圖13轉子轉過角度和轉子位置仿真波形圖 圖14電機轉速仿真波形圖 圖15電機轉矩仿真波形圖 其中,圖13的上半部分所示為轉子轉過的角度theta仿真波形,單位是rad。可以看出,在初始轉速上升階段,theta直線上升,斜率逐漸增大,隨后斜率穩定直線上升,在t=0.5s時加負載后角度上升斜率幾乎不變,說明轉速波動不大,這與后面的轉速仿真結果相符。由于仿真時間為1s,在轉速為n=1000r/min的條件下轉過的圈數約為16.7圈,且極對數P=4,故1s時轉過的角度theta為16.7×4×2π=419.7,與圖13中所示相符。 圖13的下半部分為轉子位置position的仿真波形。轉速穩定后轉子位置呈周期性變化,且由于極對數P=4,故轉子轉動一個周期其位置變化4個周期。由于仿真時間為1s,在轉速為n=1000r/min的條件下轉過的圈數約為16.7圈,且極對數P=4,故1s內position周期數應為16.7×4,約66個周期,與圖13中所示相符。 由圖14中可知,當初始時刻提供1000r/min的參考轉速時,電機實際轉速逐漸增大,并在0.1s之前達到1000r/min,然后保持穩定下來,說明系統響應快速且平穩,無靜態誤差。 在0.5s時突然增加TL=3N·m的負載轉矩,此時電機實際轉速會發生突降,且在短時間內恢復穩定,穩定轉速在略低于1000r/min的轉速下小范圍脈動,這主要是由電流換相和電流滯環控制器的頻繁切換引起的。在此過程中沒有發生大范圍波動,這說明系統的穩定性較好,滿足設計要求。 圖15為電機轉矩的仿真波形圖,與轉速仿真圖類似,從電機轉矩的仿真波形來看,轉矩數值與實際情況相符,轉矩響應快速、脈動小,滿足設計要求。 基于Matlab/Simulink仿真環境,搭建的無刷直流電機本體仿真模型和轉速-電流雙閉環驅動控制系統模型具有很好的靈活性,在此基礎上通過簡單的替換和修改就可以搭建和仿真使用其他控制算法和控制策略的仿真模型,具有良好的通用性。 [1] 張健,王笑竹.dsPIC30F6010的直流無刷電機控制系統[J].單片機與嵌入式系統應用,2015,15(9):57-60.[2] 郎寶華,閔喜艷,張婧.基于dsPIC30F3010 的無刷直流電動機控制系統設計[J].電子設計工程,2012,20(2):104-107,111. [3] 王曉明,王玲.電動機的DSP控制:TI公司的DSP應用[M].北京:北京航空航天大學出版社,2004. [4] 王曉明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2002. [5] 吳青萍.基于dsPIC30F4012的無刷直流電動機控制系統設計[J].微特電機,2012,40(8):43-45. [6] 馬瑞卿,李穎,劉冠志.基于dsPIC30F2010的無刷直流電動機正弦波驅動系統設計[J].微特電機,2010,38(8):11-14. [7] 張冉,王秀和,王道涵.基于dsPIC30F2010的無刷直流電動機控制系統設計[J].微特電機,2008,36(5):30-31,42. [8] 張健,王笑竹.dsPIC30F6010雙閉環矢量法在電機控制中的應用[J].單片機與嵌入式系統應用,2015,15(12):15-18. [9] 岳學磊,白鵬.關于無刷直流電機調速系統優化控制研究[J].計算機仿真,2015,32(10):414-419,425. [10] 呂志寬,李聲晉,盧剛,等.基于卡爾曼濾波器的無刷直流電動機仿真[J].微特電機,2011,39(4):24-28. [11] 梅亮,劉景林,董亮輝,等.基于Simulink無刷直流電機直接轉矩控制研究[J].微電機,2013,46(6):62-66.[12] 李亞美.交流伺服控制系統的模型與仿真[J].伺服控制,2012(5):40-42,36. [13] 劉維維,張亞,崔瑞男,等.電動車無刷直流電機控制系統Matlab仿真[J].工業控制計算機,2011,24(6):32-33,35. [14] 呂偉鵬.無刷直流電機雙閉環串級控制系統仿真研究[J].電子設計工程,2011,19(24):30-34. [15] 郭偉,張愛華,陳琛,等.無刷直流電機調速優化控制與仿真[J].計算機仿真,2015,32(10):360-364. Simulation Model of Brushless DC Motor Drive System Based on Matlab ZHANGJian,WANGXiaozhu (Yingkou Institute of Technology, Yingkou 115014, China) Simulation platform of Brushless DC motor drive system is established based on Matlab/Simulink. The ontology model and drive control model of DC brushless DC motor are set up, and the construction methods and practical functions of each sub module are introduced in detailwhich provide the simulation environment to analyse the drive control strategy and algorithm feasibility effectively. Based on the characteristic and variation law of simulation curve, the performance of the evaluation index system and the setting of PID parameter validation are texted, besidesm, the design and debugging of the actual motor control system are supported by the model parameters. On this basis, through simple modifications or replacement, the simulation model which can use other control algorithms and control strategies are built and it can provide a reference for fuzzy control, fuzzy PID control and regenerative braking control strategy in simulation environment to reduce the workload of the process validation. Brushless DC motor; motor control system; anti EMF zero crossing detection; simulation analysis 2016-12-09 營口理工學院青年自然科學研究項目(QNL201614;QNL201616) 張 健(1981-),男,高級實驗師,博士生,主要從事電力電子與電力傳動、電機控制等方面的研究,(E-mail) 64755512@qq.com; 王笑竹(1982-),女,講師,碩士,主要從事超聲電機與壓電材料方面的研究,(E-mail) 330608566@qq.com 1673-1549(2017)02-0016-05 10.11863/j.suse.2017.02.04 TM33 A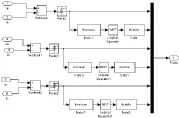
3仿真結果及分析
4結束語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(2019年12期)2019-12-25 03:06:46制造技術與機床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(2019年4期)2019-05-11 09:27:34鐵道通信信號(2018年5期)2018-06-28 03:06:24家庭影院技術(2017年9期)2017-09-26 03:41:45知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(2016年6期)2016-04-20 06:21:32