高空長航時太陽能無人機高效氣動力設計新挑戰
2017-04-28 03:45:02段卓毅耿建中李軍府
空氣動力學學報 2017年2期
段卓毅, 王 偉, 耿建中, 張 健, 李軍府
(中航工業第一飛機設計研究院, 陜西 西安 710089)
?
高空長航時太陽能無人機高效氣動力設計新挑戰
段卓毅, 王 偉*, 耿建中, 張 健, 李軍府
(中航工業第一飛機設計研究院, 陜西 西安 710089)
高空長航時太陽能無人機具有飛行雷諾數低、結構柔性大等設計特點,在氣動力設計時,一般采用單設計點的設計思想,即在預定設計狀態下具有較為優異的氣動特性,但稍微偏離該設計點時,將顯著地削弱其氣動力特性,為其高效氣動力設計帶來諸多新挑戰。本文首先簡要回顧了太陽能飛機的發展歷程,并分析了該類飛機的設計特點;隨后,重點介紹了該類飛機的高效低雷諾數氣動力設計面臨的挑戰及機翼氣動彈性效應對全機氣動力特性的影響;最后,分析展望了縮比自由飛驗證技術在該類飛機高效氣動力設計中的應用。
太陽能無人機;低雷諾數;氣動力設計;氣動彈性;縮比自由飛;單設計點
0 引 言
飛得更高、飛得更久是航空工作者孜孜追求的目標之一。近空間或臨近空間區域內的風場變化規律較為平穩,并且具有較高的太陽能利用效率,為大尺度高空長航時太陽能無人機提供了天然的使用環境;另外,隨著航空科學技術與新能源技術的發展及其有機結合,太陽能動力驅動的飛行器僅依靠太陽輻射能量、光伏組件和二次電池組成“采充放”(采能、儲能、供能)系統,再由螺旋槳推進系統提供拉力維持飛行,可實現真正意義上的高空長久不間斷飛行,使人類實現跨月、跨季度甚至跨年飛行的夢想不再是遙不可及的愿景[1-4]。
若高空長航時太陽能無人機裝載有對地監測的遙感設備,則能夠對被監測區域進行高分辨率觀測,進而達到實時監測的目的,可有效地補充衛星等對地監測的不足。高空長航時太陽能無人機作為通信中繼站時,與地面通信中繼站相比具有覆蓋區域廣、直視范圍內通信衰減小等優點,與衛星通信相比具有衰減小、延遲時間短等優點,并且可以多次回收,便于通信系統的快速更新、升級等,而且具有較好的靈活性。高空長航時太陽能無人機作為預警系統子單元搭載有預警設備時,比常規機載預警系統的滯空能力強,比地面預警系統具有更高的探測能力、更好的靈活性及安全性,相比預警衛星可以實現實時、定點預警,并且維護成本相對更低、分辨率更高。高空長航時太陽能無人機可以有效地彌補常規燃油動力飛機與低軌道衛星之間的任務執行空白,補充完善空間信息格柵,具備廣泛的發展潛力及應用前景。這引起了研究者廣泛的研究興趣,并在多個國家頻繁傳出新的研究進展[5-24]。
由于高空長航時太陽能無人機飛行高度較高(一般H>18000 m),大氣密度低且較為稀薄,其飛行速度又較低,導致其飛行雷諾數較低,流體流動常常處于層流狀態,抗逆壓梯度能力弱,容易產生分離、轉捩等流動現象。大量實驗也表明,氣動性能隨雷諾數的降低,將出現急劇下降,從而對高空低速大展弦比高空長航時太陽能無人機的氣動設計帶來較大挑戰。另外,高空長航時太陽能無人機一般采用柔性機翼結構設計思想,在氣動載荷的作用下,機翼將產生較大的彈性變形,從而引起氣動載荷的重新分布,影響全機的氣動特性,是該類飛機氣動力設計面臨的另外一個挑戰。
本文首先回顧高空長航時太陽能無人機的發展現狀,并分析該類飛機的設計特點,隨后分析了高空長航時太陽能無人機低雷諾數氣動力設計技術面臨的挑戰和靜氣動彈性效應對全機氣動特性的影響,最后討論了縮比自由飛驗證技術在高空長航時太陽能無人機總體氣動設計中的工程應用。
1 高空長航時太陽能無人機的發展現狀及設計特點分析
1.1 高空長航時太陽能無人機的發展現狀
高空長航時太陽能無人機作為一種很有發展前途的機種,受到了許多國家的重視,是偵察衛星、有人戰略偵察機和電子戰飛機的有效補充,且具有使用維護成本低廉、低風險、綠色環保無污染等優勢。在大氣環境監測、天氣預報、災害監測、通信中繼、邊境巡邏、廣域持久偵察、電子對抗等軍民用具有廣闊的發展前景。自1974年11月4日世界上第一架太陽能飛機Sunrise I首飛至今已有數十個太陽能飛機的研究被公開報道,如圖1所示。
近十年來,隨著光伏組件轉換效率、二次電池能量密度的提高,重力儲能等航跡規劃技術的有效應用,以及新材料、微電子等技術的發展,太陽能無人機的高空跨晝夜飛行即將實現的事實,逐漸得到了研究者的廣泛認可。其中獲得連續資助的主要有美國的“太陽神”系列[15-18]和英國的“西風”系列[19]太陽能無人機等。在試飛的過程中,“太陽神”系列太陽能飛機曾創下螺旋槳動力飛行器最高的飛行高度記錄(突破30km);2010年7月,“Zephyr 7”以14天22分鐘的連續飛行刷新了原先由“Zephyr 6”保持的最長飛行時間的記錄[20]。
根據高空長航時太陽能無人機的發展現狀及歷程,可以將其設計理念的發展過程劃分為三個典型階段,如圖2所示:讓“飛機”飛的概念設計階段;讓“載荷”飛的快速發展階段;讓“能源”飛的工程實現階段。
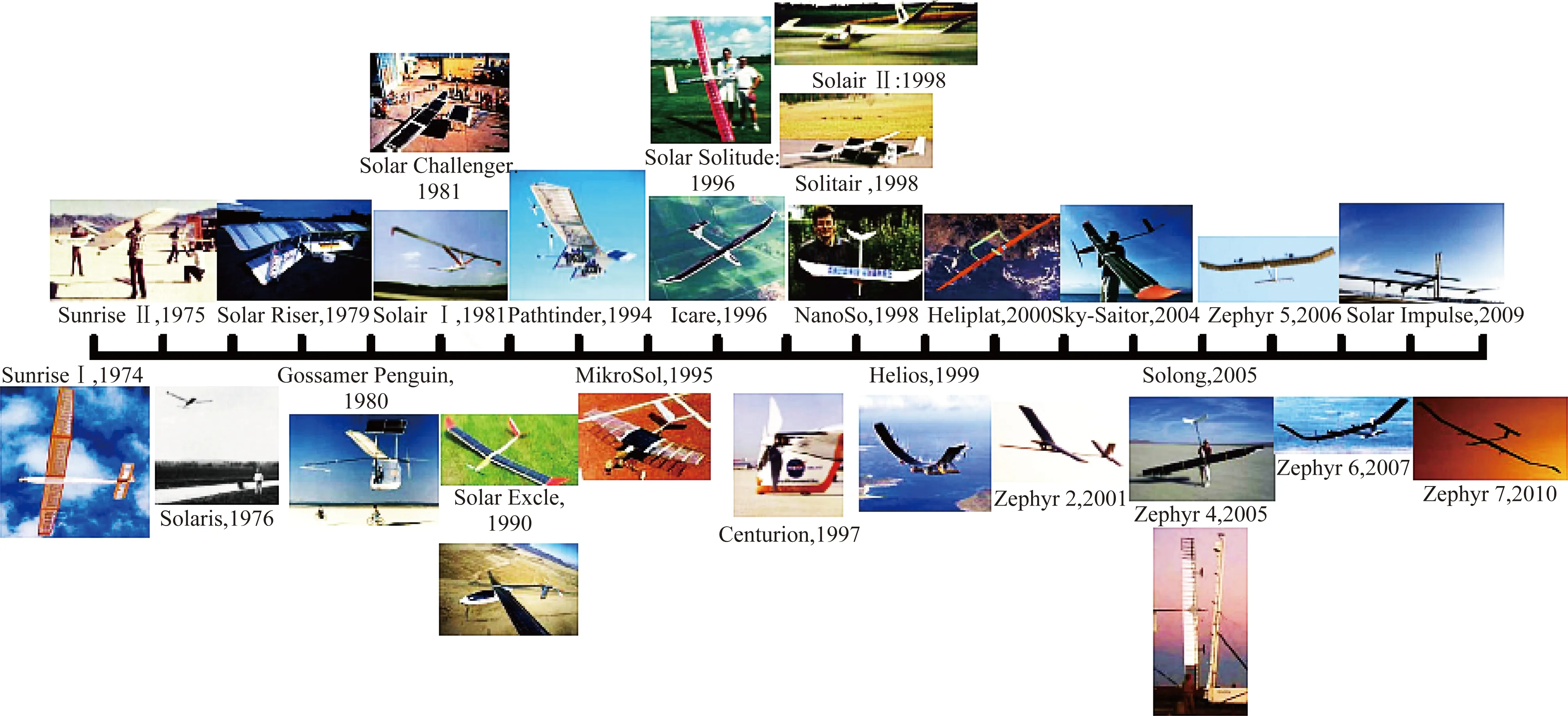
圖1 太陽能飛機的發展歷程Fig.1 Developing history of solar powered aircraft
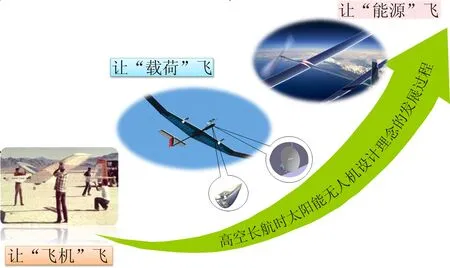
圖2 太陽能飛機設計理念的發展歷程Fig.2 Developing history of concept design for solar powered aircraft
在太陽能飛機發展的初期階段,主要是以驗證其布局設計的可行性為目的,并不著重強調高空和長航時等設計指標。隨著太陽能無人機設計技術的進一步發展和提升,研究者們逐步實現了在搭載一定有效載荷的前提下,驗證該類飛機在海拔20 km以上高度的高空飛行單一設計指標;隨著蓄電池技術的發展,二次電池的能量密度逐漸得到提升,高空長航時太陽能無人機即將迎來讓“能源”飛的工程應用階段,全面實現高空長航時設計指標。
1.2 高空長航時太陽能無人機的設計特點分析
高空長航時太陽能無人機作為一種臨近空間飛行平臺,為了滿足其高空長時間駐留的設計指標,其氣動、結構等設計要求比常規飛機更為苛刻,并要求各個系統同時具有極低的能耗和極高的效率,具有低結構面密度、低翼載荷、低功重比、低雷諾數、大展弦比、高升阻比等總體氣動設計特點。
一般把全機結構重量與機翼參考面積的比值定義為結構面密度,全機重量與機翼參考面積的比值定義為平飛翼載荷。對比“Pathfinder”、“Zephyr 6”、“Heliplat”等高空長航時太陽能無人機,以及“Solar Impulse I”載人中空,典型常規燃油動力的高空長航時無人機“Global Hawk”的結構面密度和翼載荷,如圖3和圖4所示。太陽能飛機的結構面密度和翼載荷均小于全球鷹無人機結構面密度和翼載荷的5%;盡管兩類飛機均以高空長航時最為設計目標,其設計特點卻有顯著的不同。
由于能量攝取方式及動力形式上的差異,全球鷹高空長航時無人機的設計飛行速度為馬赫數0.6,而太陽能飛機的設計飛行速度一般非常低(小于馬赫數0.1),導致太陽能飛機的翼載荷顯著地小于常規燃油動力飛機“全球鷹”的翼載荷。另外,與常規動力高空長航時飛機相比,太陽能飛機需要相對較大的機翼面積鋪設太陽能電池板,結構重量又必須盡可能的輕,導致其結構面密度和翼載荷也非常小,從而對機翼結構設計帶來更為苛刻的限制。

圖3 結構面密度對比Fig.3 Comparison of structural surface density

圖4 平飛翼載荷對比Fig.4 Comparison of wing load for level flying
受限于二次電池的能量密度較低,一般需要裝載較大重量的蓄電池以滿足飛行需求,需要較高的氣動效率、推進系統效率等盡可能地降低平飛需用功率。把平飛需用功率與飛機起飛重量的比值定義為功重比,則太陽能飛機與全球鷹無人機的功重比對比如圖5所示。可以看出,太陽能飛機與全球鷹無人機相比,緊張的能源供給將對該類飛機造成非常嚴峻的設計約束。
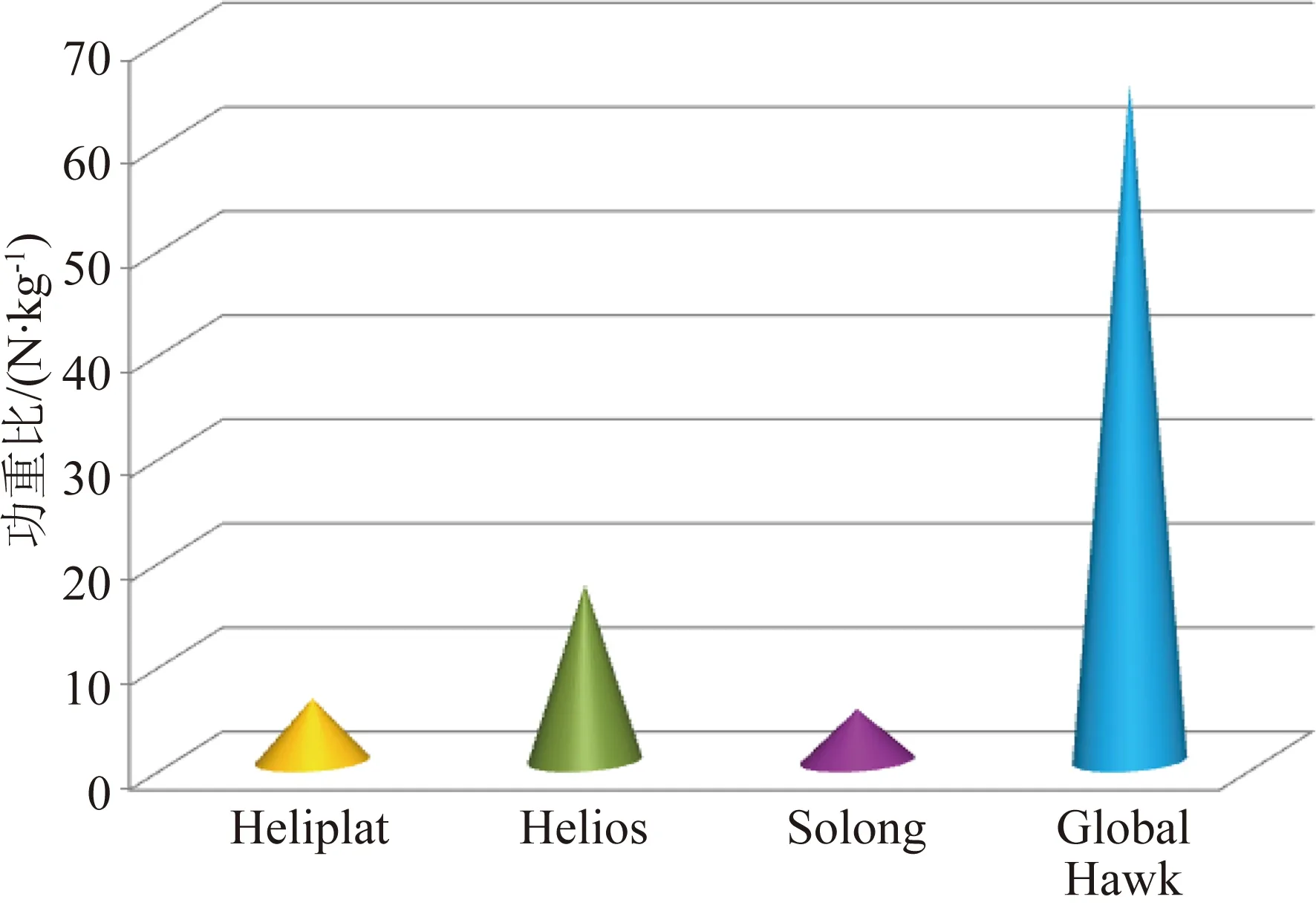
圖5 平飛功重比對比Fig.5 Comparison of power-weight ratio
由于高空長航時太陽能飛機的設計飛行高度較高,設計飛行速度較低,導致該類飛機的氣動設計具有典型的低雷諾數特征。對比海鷗、太陽能飛機、微型無人機、民航客機、戰斗機的典型雷諾數(如圖6所示),可以看出,太陽能無人機的雷諾數僅有20萬左右,將對該類飛機的氣動設計帶來一些新的挑戰,后文中將進一步詳細闡述。
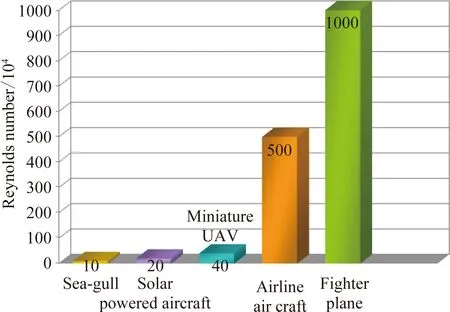
圖6 雷諾數對比Fig.6 Comparison of Reynolds number
受限于緊張的能源平衡約束,為了達到高空長航時的設計要求,需要盡可能地提高太陽能飛機的氣動效率。針對這一設計特點,太陽能飛機與全球鷹無人機采取了一致的措施,即通過增大機翼展弦比來降低誘導阻力,從而提高巡航升阻比。圖7和圖8中分別給出了一些太陽能飛機與全球鷹無人機的升阻比和展弦比對比關系。
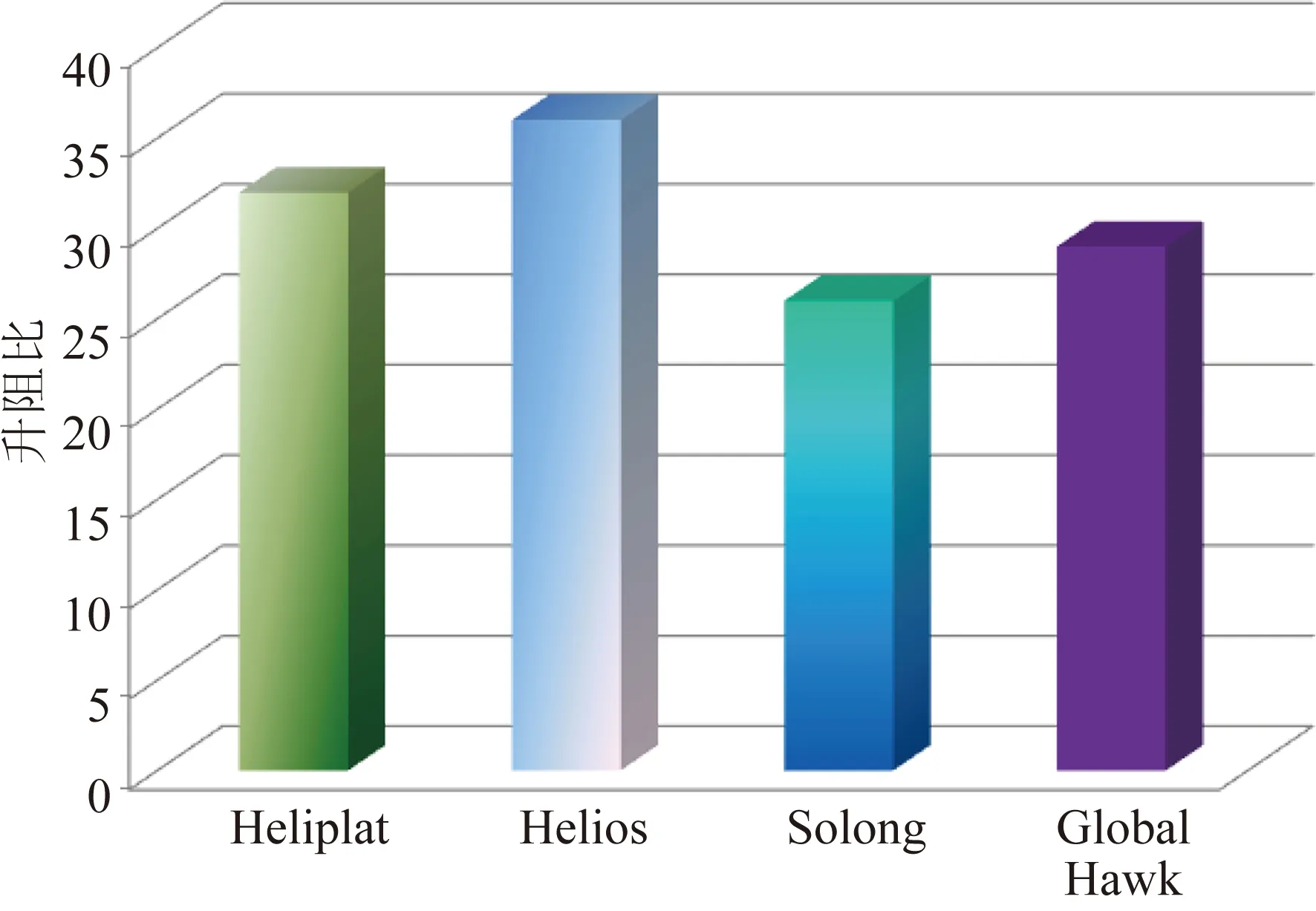
圖7 巡航升阻比對比Fig.7 Comparison of lift-drag ratio
2 高空長航時太陽能無人機的低雷諾數氣動力設計
高空長航時太陽能無人機飛行高度較高、飛行速度低,巡航飛行環境中大氣較為稀薄,使得該類飛機具有典型的低雷諾數氣動力設計等特點,流場具有層流分離、轉捩和湍流再附等低雷諾數流場典型的流動特征,對該類飛機的高效氣動力設計帶來了嚴峻的挑戰。另外,在該類飛機總體設計時,又要求具有較高的巡航升阻比,使得高效低雷諾數氣動力設計技術成為關乎該類飛機設計成敗的關鍵技術之一。
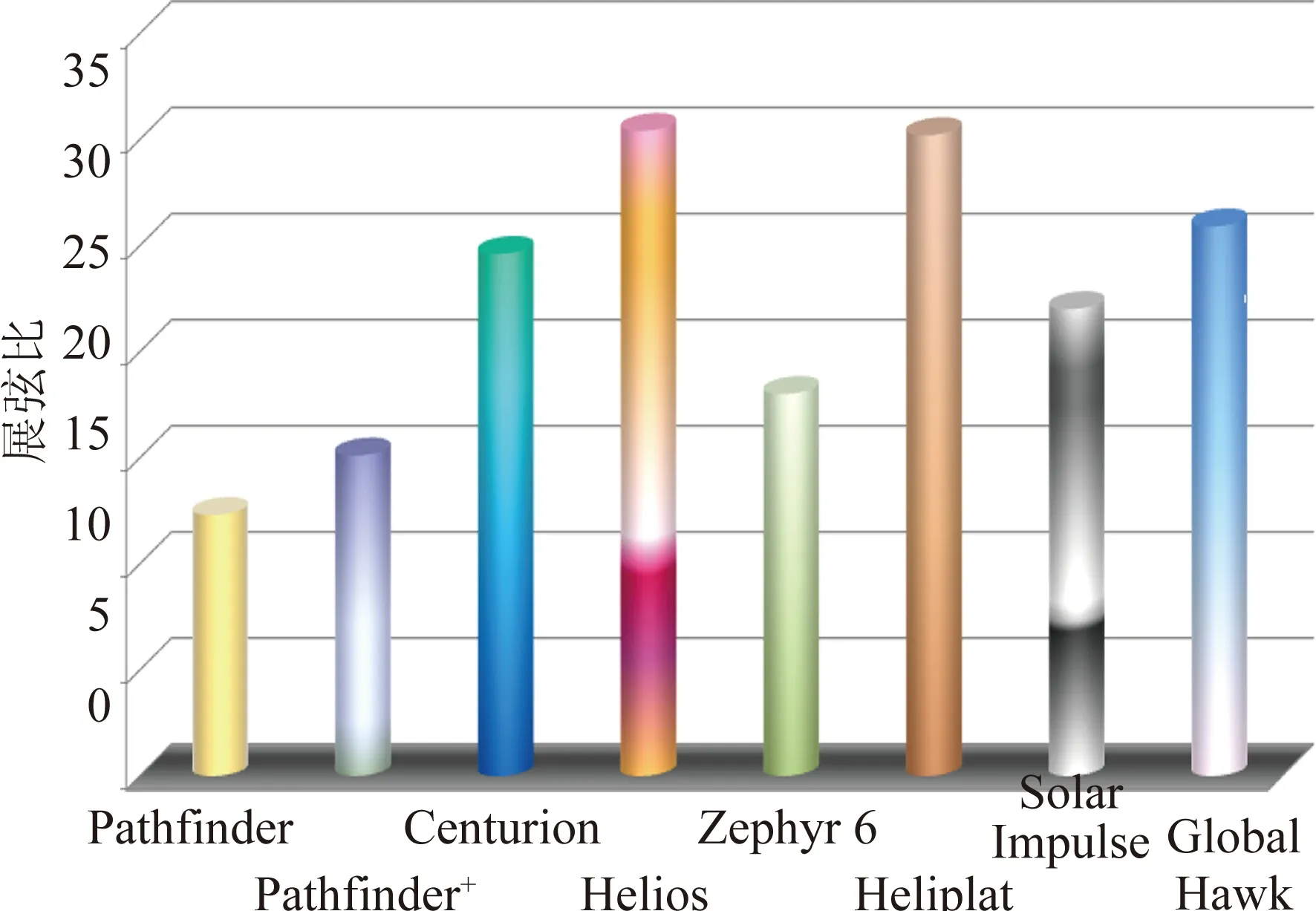
圖8 展弦比對比Fig.8 Comparison of aspect ratio
2.1 高空長航時太陽能無人機低雷諾數翼型氣動力數值模擬
層流向湍流轉捩和層流分離泡的預測是高空長航時太陽能無人機低雷諾數氣動力數值模擬的關鍵技術之一。在低雷諾數狀態下,層流分離剪切層出現轉捩時,將轉變為湍流并且出現流動再附,形成層流分離泡,從而顯著地影響翼型及全機的氣動性能。如果預測的轉捩點位置偏前或滯后,則分離泡的再附點也將偏前或滯后,進而預測的層流分離泡將偏小或偏大,顯著地影響表面壓力分布和摩擦阻力系數,從而影響對氣動力和流場的預測。因此,對轉捩位置的判斷將直接影響計算結果的準確性。目前主要的轉捩預測方法有四種:1) 由Smith、Gamberoni[25]和Van Ingen[26]提出的基于小擾動理論和線性穩定性理論的eN半經驗方法;2) 求解拋物型穩定性方程(PSE)方法[27-28];3) 直接數值模擬(DNS)和大渦模擬(LES)[29-30];4) 基于Reynolds 平均Navier-Stokes方程(RANS)湍流模型的方法。由于計算機容量和計算速度的限制,直接數值模擬和大渦模擬均難以在短時期內進入工程實用階段,目前低雷諾數氣動力數值模擬主要是在雷諾平均方程的基礎上,借助適當的湍流模型來實現[31]。
針對翼型和機翼的低雷諾數氣動數值模擬研究,Somers等[32]使用Eppler翼型設計分析軟件和基于eN轉捩預測方法與邊界層耦合數值求解方法的XFOIL軟件[33],對6個典型低雷諾數翼型的氣動性能進行了理論分析,給出了翼型的典型低雷諾數效應。張強等[34]數值模擬了E387翼型的低雷諾數非定常氣動特性,對SSTk-ω湍流模型、代數B-L模型和層流的計算結果作了比較,湍流模型計算時采用固定點轉捩,分析了轉捩判斷對低雷諾數氣動計算的影響,研究了分離泡的不穩定性及周期性變化。白鵬等[35]對低雷諾數下E387翼型上表面后緣的長層流分離泡現象進行了非定常數值模擬,研究了層流分離的非定常特性、渦脫落的周期性過程及其對氣動力造成的影響,并分析了雷諾數和迎角對分離泡形態的影響。關鍵等[36]使用Spalart-Alllnaras、SSTk-ω、Realizablek-ε三種湍流模型對E387翼型低雷諾數繞流流場進行了數值模擬,參考風洞試驗數據評估三種模型的模擬能力,采用基于Michel的轉捩判據后,能夠更準確地計算出阻力、預測出層流分離泡。Karasu等[37]使用SSTk-ω湍流模型、k-kL-ω轉捩模型和SST轉捩模型研究了低雷諾數下NACA2415翼型的層流分離泡,與風洞試驗數據對比表明,轉捩模型比湍流模型更適合于層流分離泡和低雷諾數流動的預測。成婷婷等[38]使用SST轉捩模型在NACA0012翼型上驗證了其具有較好的轉捩預測能力,并對使用粗糙帶的翼型氣動特性進行了研究。Sahin等[39]采用直接數值模擬方法,對低雷諾數下E387翼型和機翼進行了時間相關的非定常計算,得到包括壓力、升力和阻力系數的瞬態和時均化氣動參數,與試驗數據進行對比,并比較了二維和三維流動的差異。
周洲[40-41]等以高空長航時太陽能無人機為研究背景,對低雷諾數翼型E387和FX 63-137使用多種轉捩模型和湍流模型,開展了較為系列的研究;并參照風洞試驗結果,對比分析了常用轉捩模型對兩種翼型的升阻力和層流分離泡的預測能力,為太陽能無人機低雷諾數氣動數值模擬方法提供了較好的工程應用參考。選擇eN轉捩預測方法(XFOIL)、k-kL-ω轉捩模型、γ-Reθ t轉捩模型對E387和FX63-137翼型(如圖9所示)的升力、阻力、俯仰力矩進行計算,結果如圖10所示。

圖9 E387與FX 63-137外形對比Fig.9 Configuration of E387 and FX 63-137
兩種翼型表面層流分離泡位置隨迎角變化情況如圖11所示,其中LS表示層流分離,TR表示湍流再附,NT表示自然轉捩。
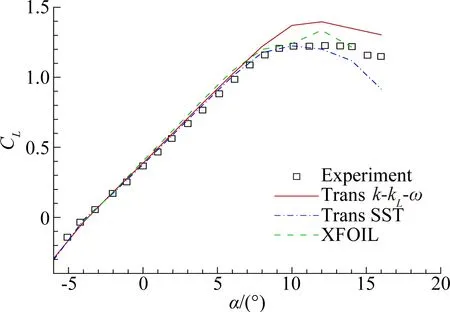
(a) E387 CL-α
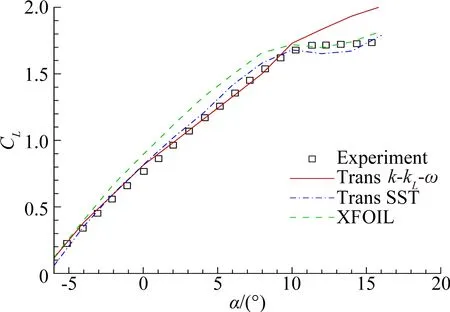
(b) FX 63-137 CL-α
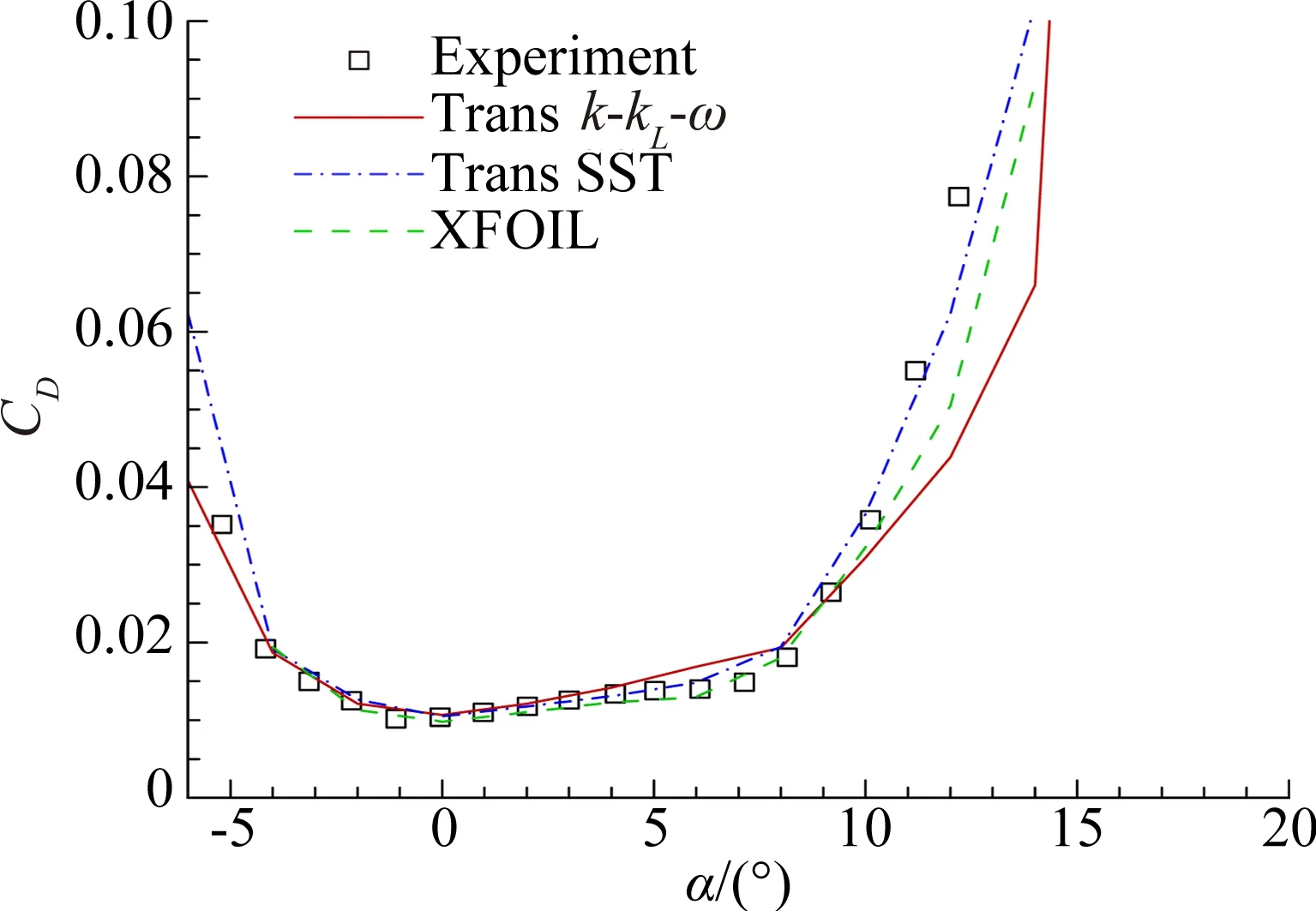
(c) E387 CD-α

(d) FX 63-137 CD-α
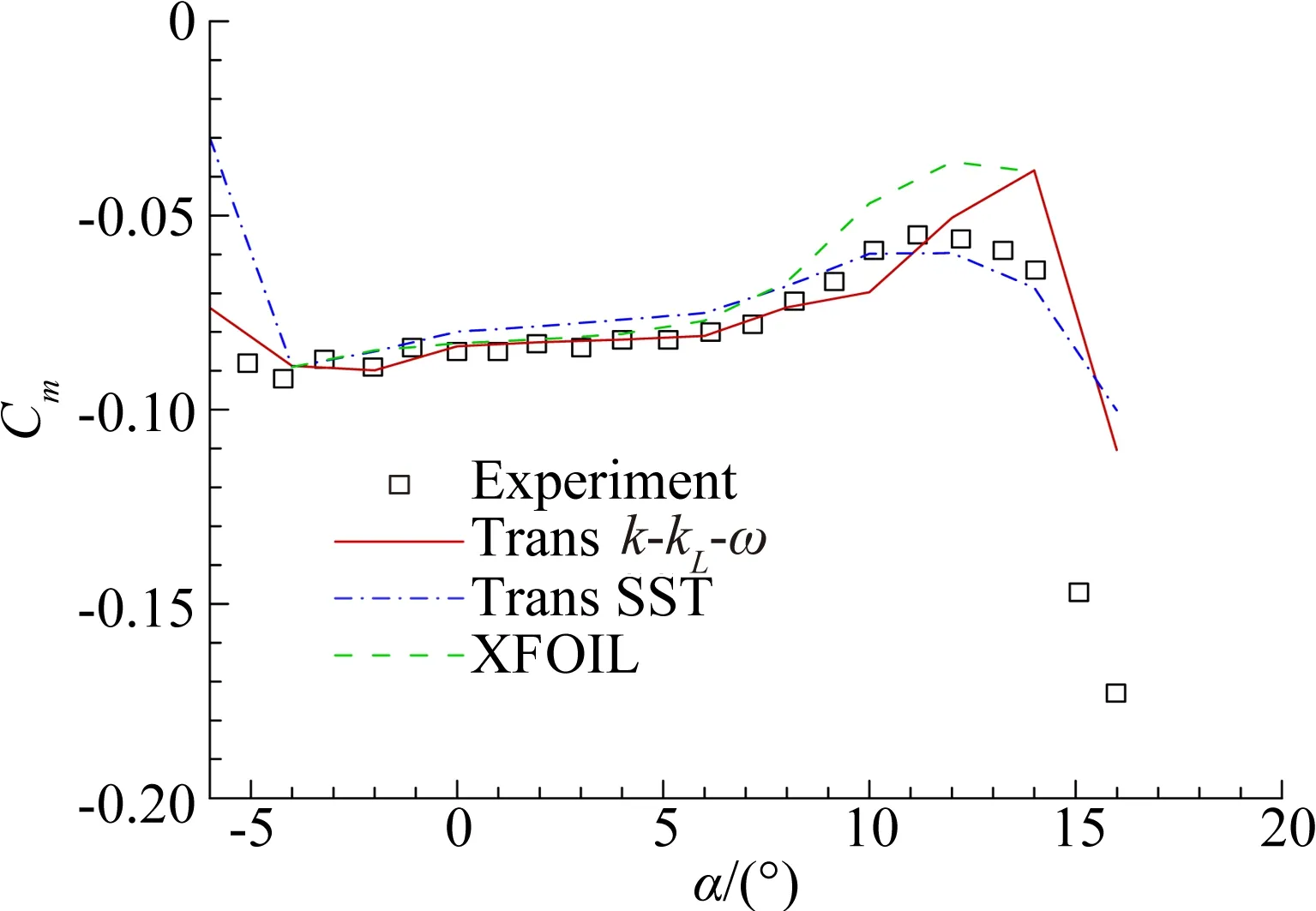
(e) E387 Cm-α
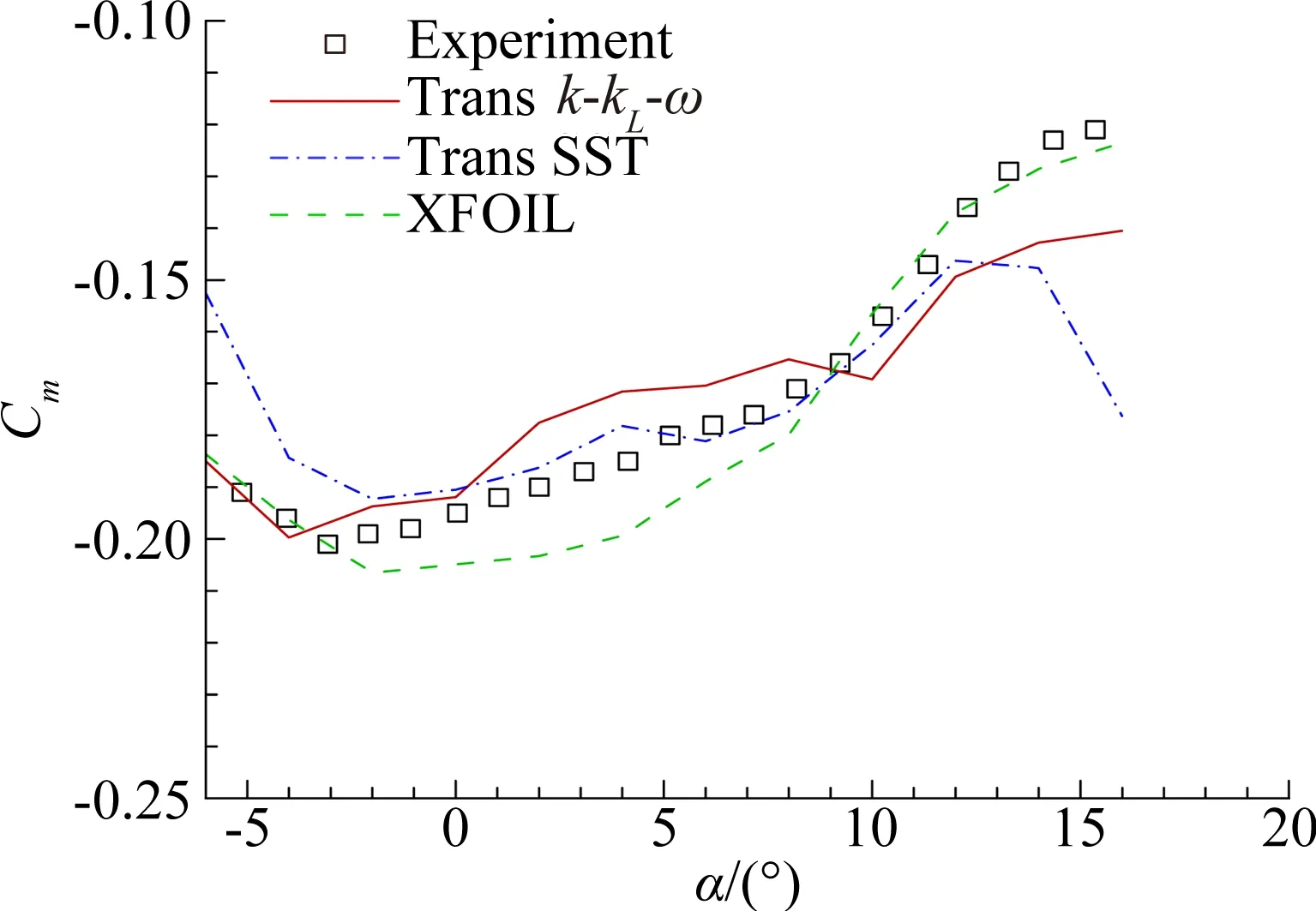
(f) FX 63-137 Cm-α
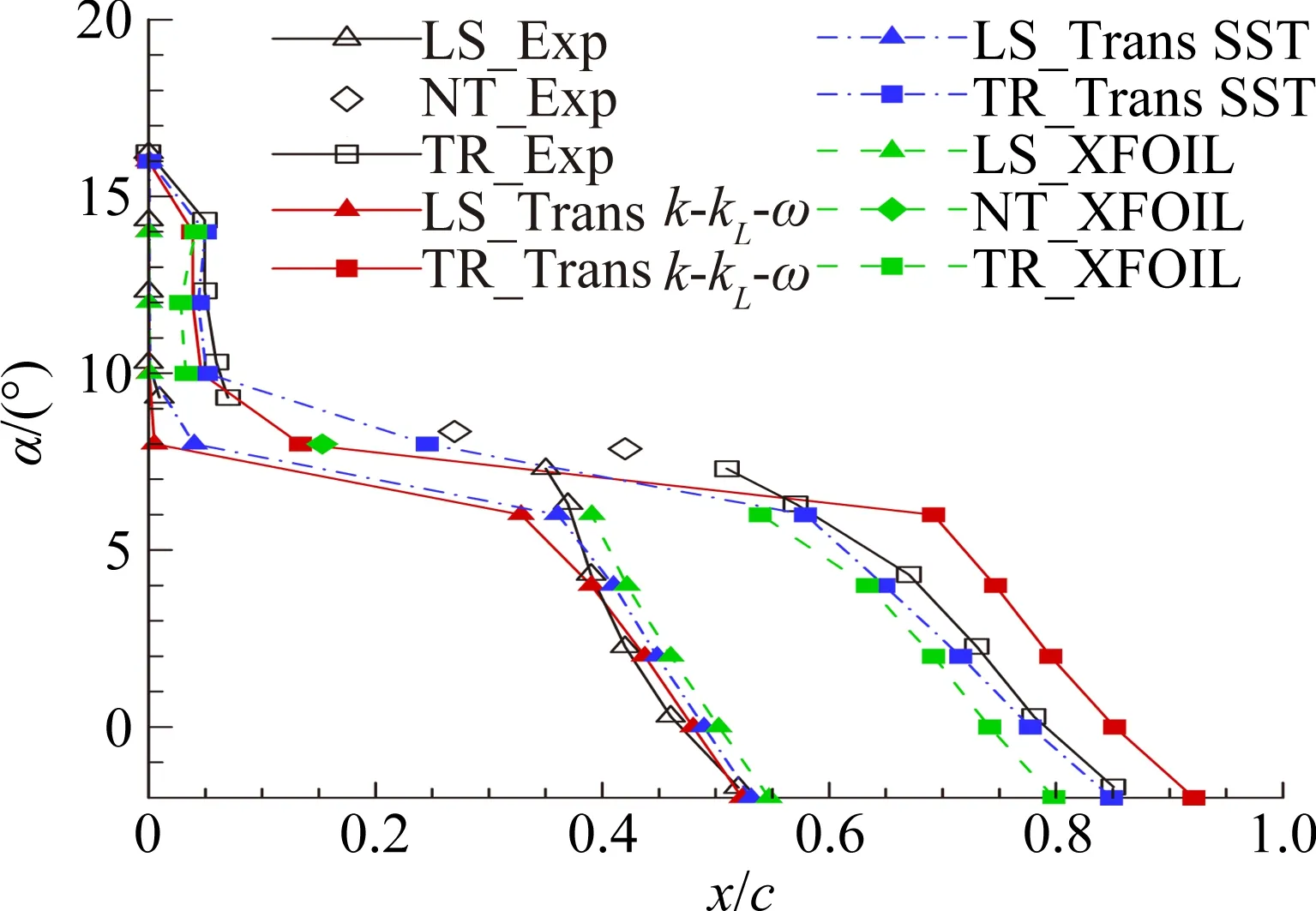
(a) E387

(b) FX 63-137
采用eN轉捩預測方法能夠比較準確地計算出中小迎角下的氣動力系數,在大迎角失速情況下難以收斂;k-kL-ω轉捩模型比較準確地計算出中迎角下的氣動力系數,在大迎角下計算的升力偏大、阻力偏小,其預測的層流分離泡偏大;SST轉捩模型在整個迎角范圍內都能比較準確地計算出氣動力系數和層流分離泡,考慮到低雷諾數流動大多情況都存在分離流轉捩而不是自然轉捩,更適合用于高空長航時太陽能無人機的低雷諾數氣動數值模擬。
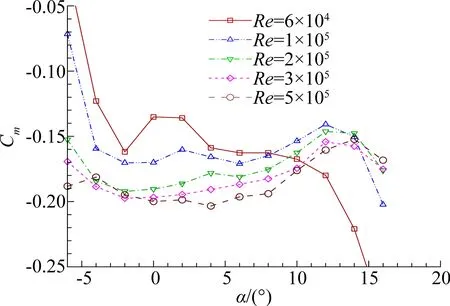
仍以E387和FX 63-137翼型為例,選取五個不同的雷諾數——6×104、1×105、2×105、3×105和5×105,基本覆蓋了高空長航時太陽能無人機飛行的低雷諾數范圍,研究翼型氣動性能隨雷諾數的變化特點,進行雷諾數效應分析。計算得到兩個翼型的氣動力特性隨雷諾數變化如圖12所示。
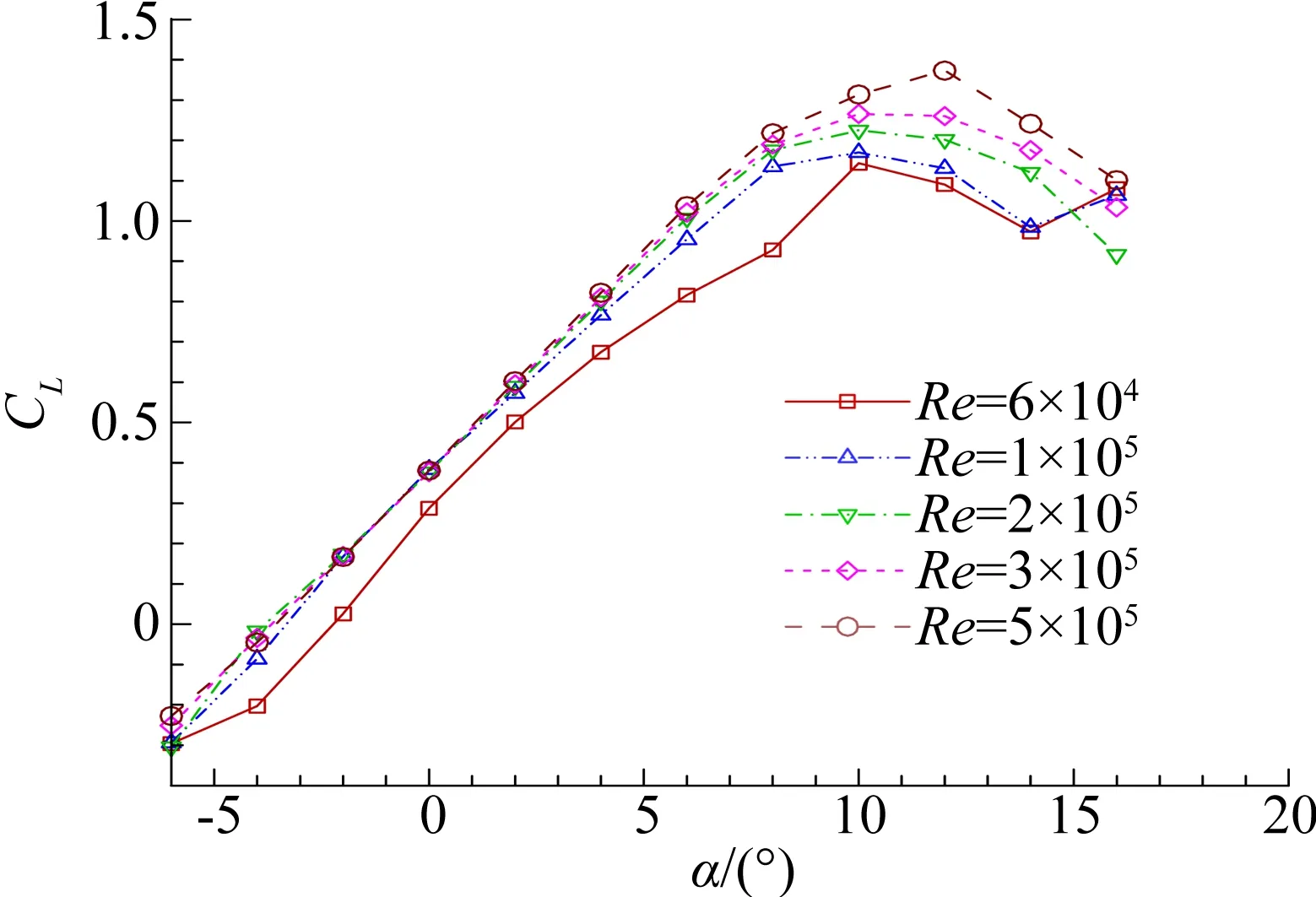
(a) E387 CL-α
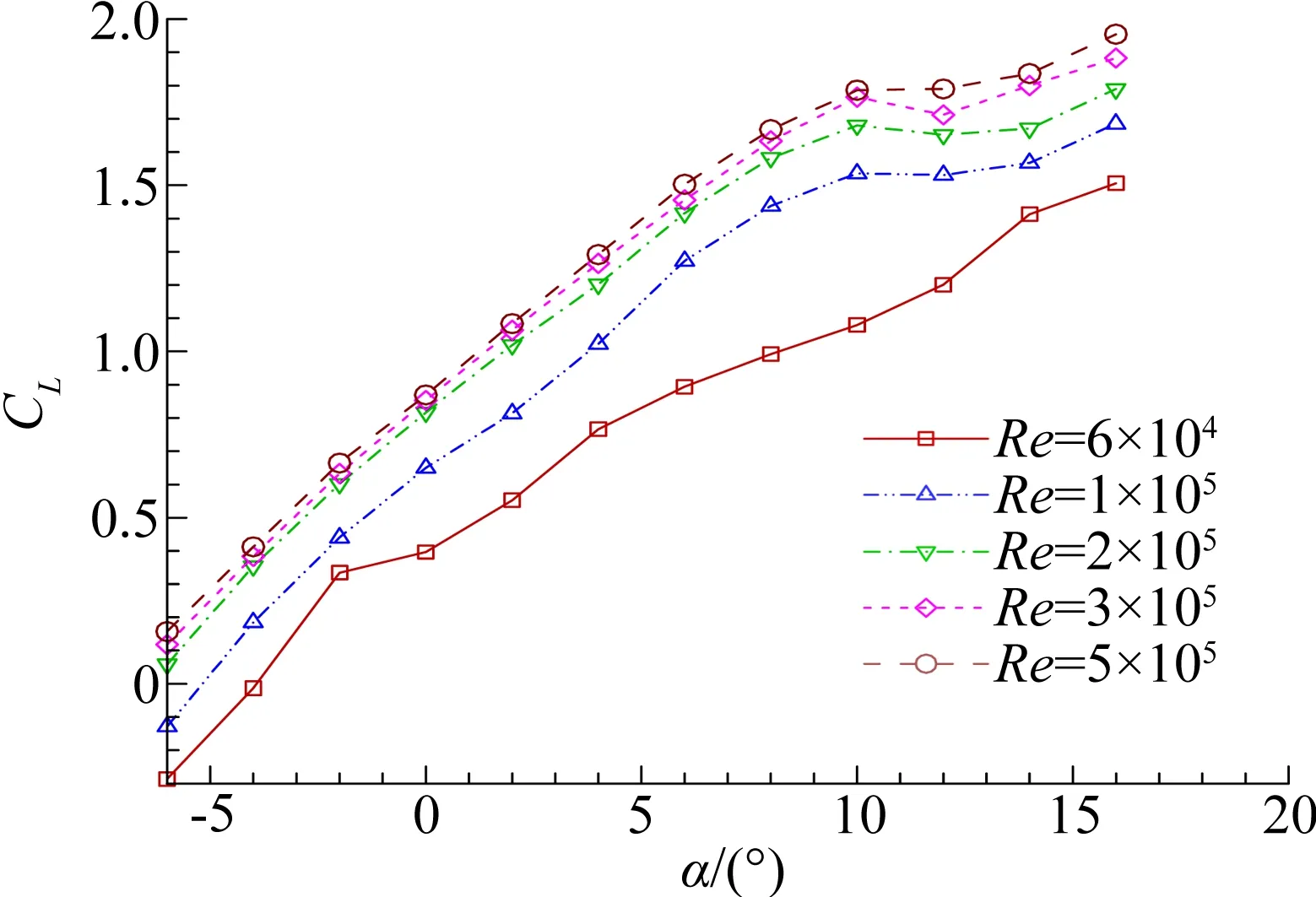
(b) FX 63-137 CL-α
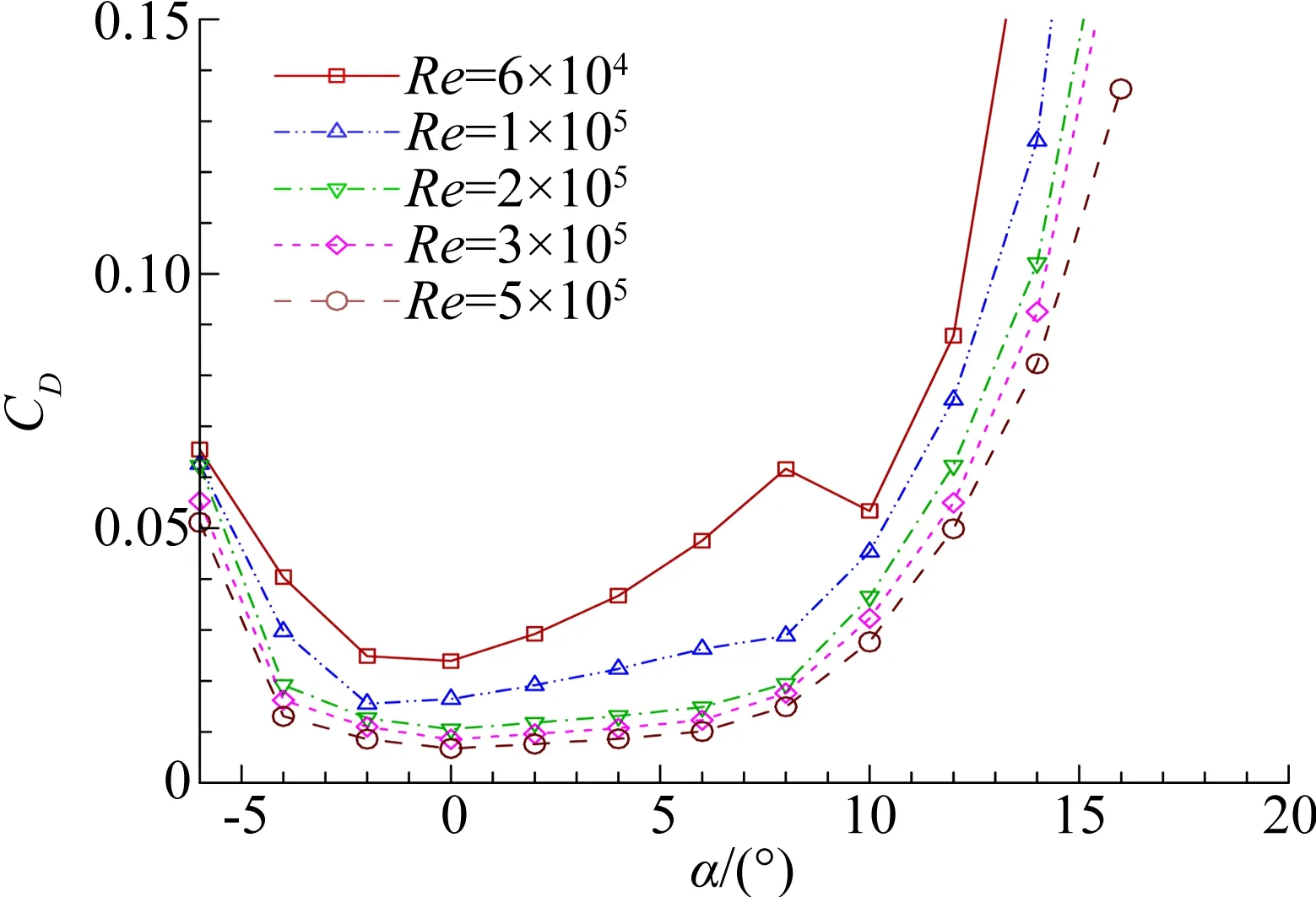
(c) E387 CD-α
(d) FX 63-137 CD-α
(f) FX 63-137 Cm-α

(g) E387 K-α
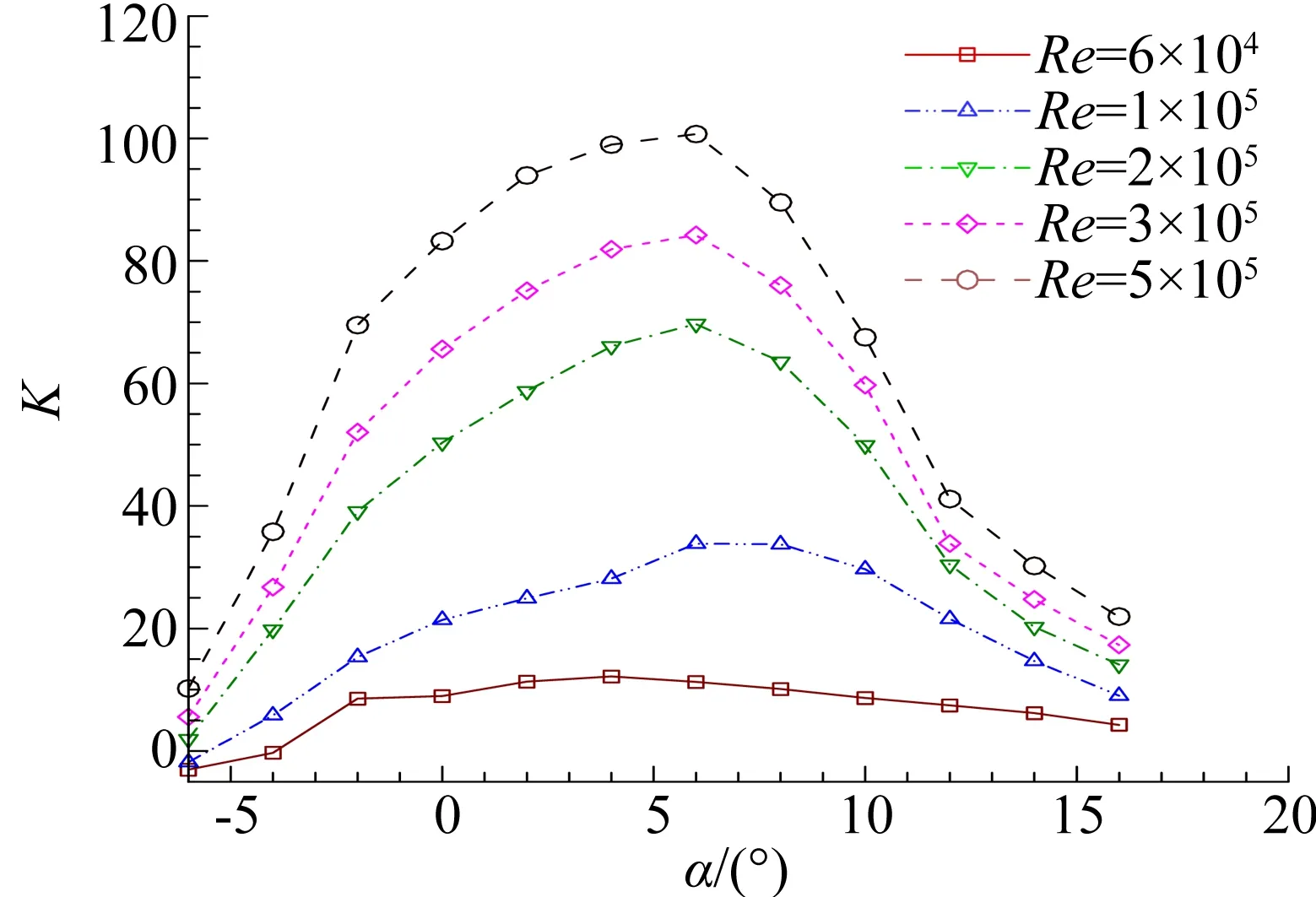
(h) FX 63-137 K-α
由圖12和圖13中的計算結果可以看出,隨著雷諾數減小,層流分離泡增大,升力減小,阻力增大,氣動性能呈現出顯著地惡化。在Re=6×104時,兩個翼型流動在層流分離后沒有在翼型表面形成湍流再附,氣流完全分離,造成升力很小,阻力很大,氣動性能嚴重惡化,并且升力系數曲線不再保持線性;其中E387在10°~12°迎角出現了湍流再附,形成完整的層流分離泡,這時阻力顯著減小,形成升阻比最大的峰值,并且由于后部湍流附著流動改變了壓力分布,這時低頭力矩顯著減小。在Re=1×105時,E387翼型在迎角-2°以及FX 63-137在迎角6°以下仍然只有層流分離,沒有湍流再附,但在更大迎角下出現了湍流再附,形成層流分離泡。由于在Re=1×105時出現層流分離泡和附著流動,翼型上表面形成吸力峰,其氣動性能較在Re=6×104時的氣動性能有很大改善。隨著雷諾數增加,層流分離點后移,湍流再附點前移,層流分離泡變小,升力增大,阻力減小,氣動性能改善。E387在Re=1×105以上,FX 63-137在Re=2×105以上時,隨著雷諾數增加,小迎角下的升力增大程度很小,但大迎角下升力增大程度明顯,這是因為增加雷諾數減小了后部的湍流分離。兩個翼型在較低雷諾數時,最大升阻比對應的迎角隨雷諾數增加而減小,但在較高雷諾數時,最大升阻比對應的迎角變化較小。E387除了在Re=6×104由于層流分離改變壓力分布而引起力矩系數變化較大外,隨雷諾數增加其力矩系數變化較小;FX 63-137除了在Re=6×104時大迎角下出現很大的低頭力矩外,隨雷諾數增加而產生更大的低頭力矩。

(a) E387

(b) FX 63-137
HELIPLAT[8]太陽能無人機機翼采用的低雷諾數翼型為HPF118翼型,如圖14所示。在文獻[8]中,Romeo給出了不同雷諾數下,HPF118翼型的升阻特性,如圖15所示,并指出在高空長航時太陽能無人機的氣動設計時,需要著重考慮其低雷諾數氣動效應所引起的氣動特性惡化現象。

圖14 HPF118 翼型Fig.14 HPF118 airfoil

圖15 HPF118翼型升阻特性Fig.15 Aerodynamics of HPF118 airfoil
2.2 低雷諾數對高空長航時太陽能無人機氣動特性的影響
高空長航時太陽能無人機在總體氣動設計時,要求較高的升阻比,而低雷諾數效應將顯著地惡化翼型的氣動特性,進而會顯著地削弱全機升阻比,從而不利于該類飛機的總體氣動設計。目前,關于低雷諾數效應對翼型氣動特性的影響研究工作比較多,但針對高空長航時太陽能無人機的三維全機氣動特性研究,相對要少得多。西北工業大學周洲[42-43]等以全翼式太陽能無人機(如圖16所示)為研究背景,研究了雷諾數對該類飛機氣動特性的影響。
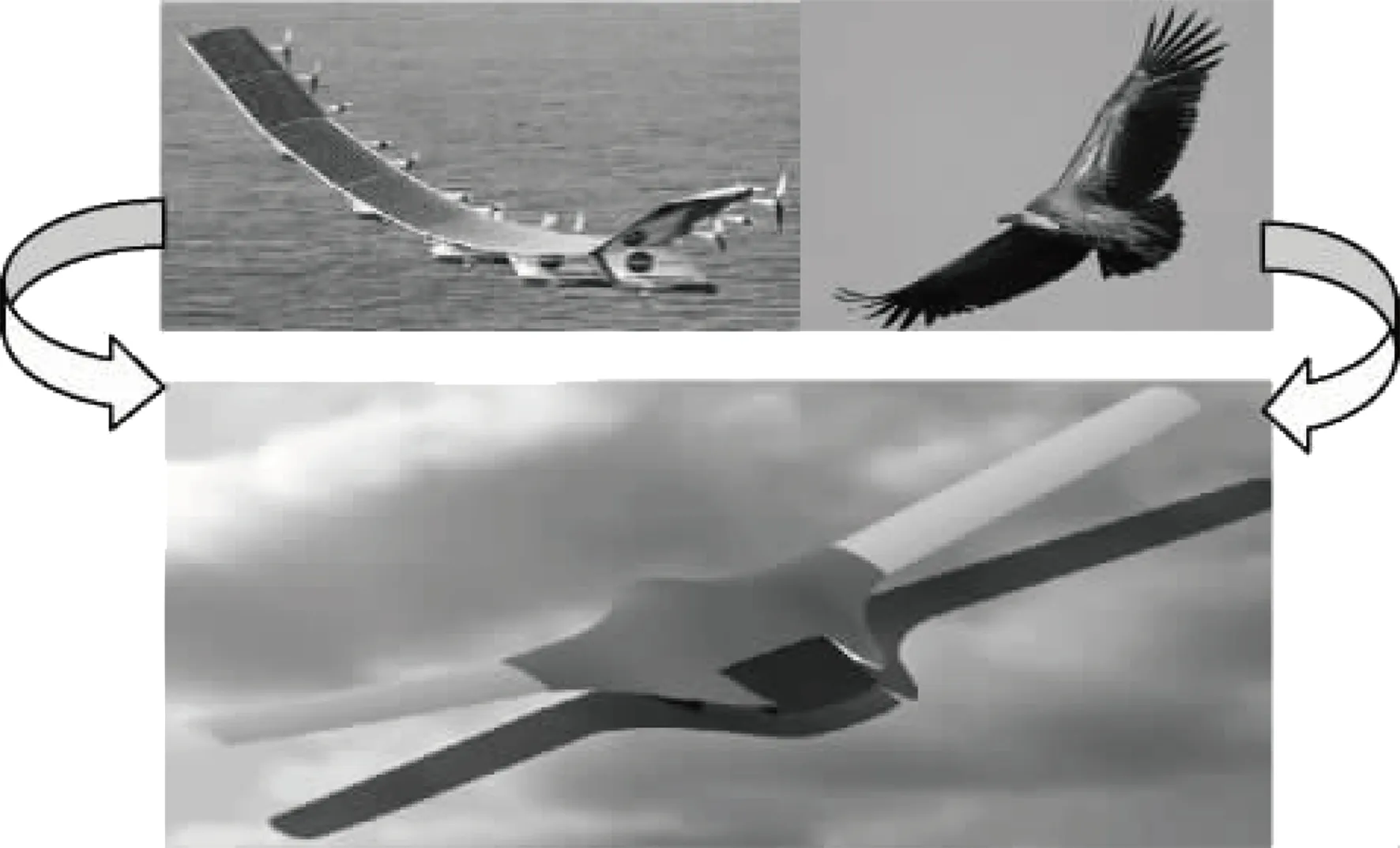
圖16 某仿生全翼式太陽能無人機Fig.16 Bionic full wing solar powered UAV
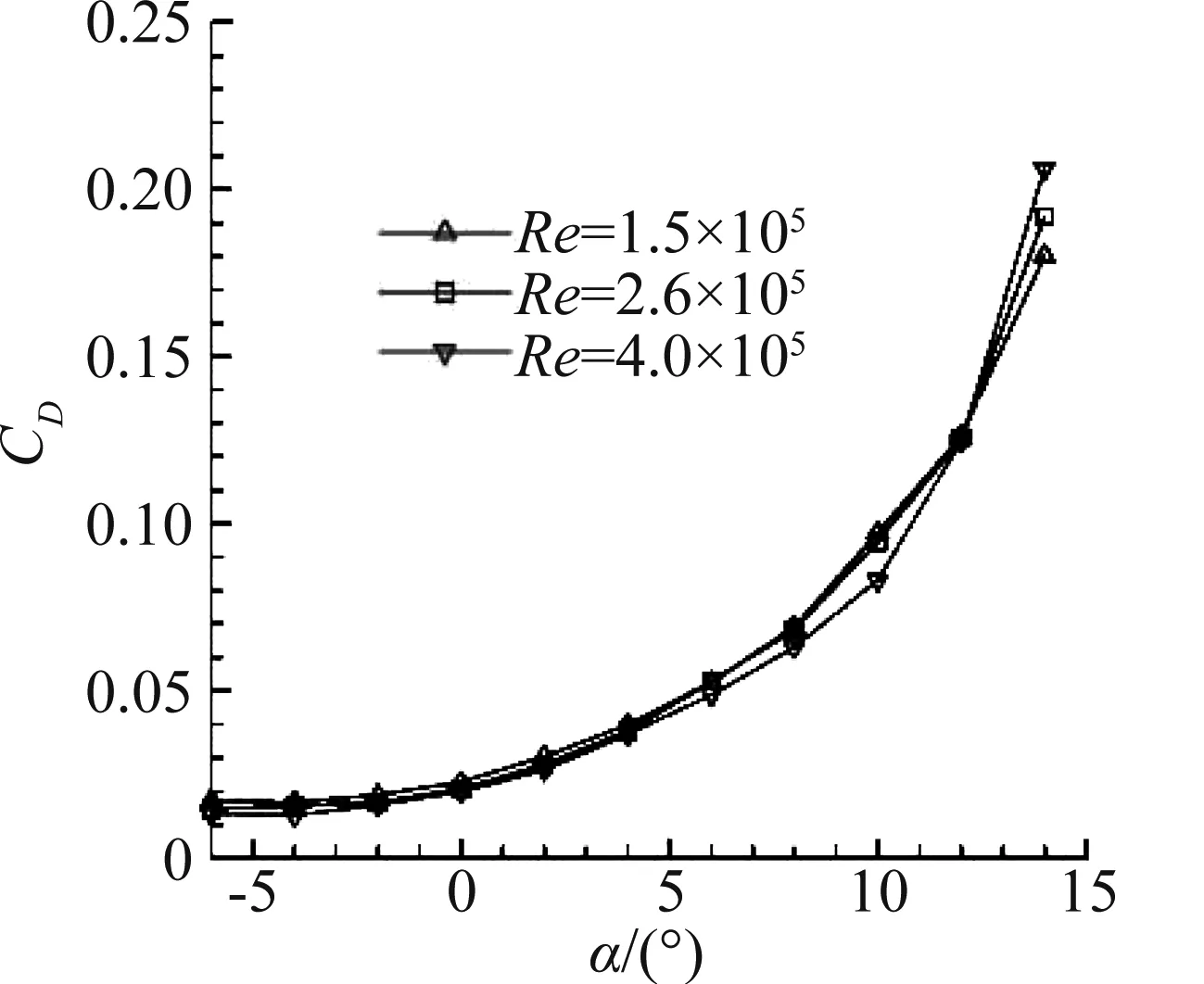
選取Re=1.5×105、2.6×105和4×105等三個低雷諾數計算狀態,計算得到的全機氣動特性如圖17所示。
隨著雷諾數的降低,升力系數略有減小,阻力系數增大,使得最大升阻比產生顯著地下降(最大升阻比由Re=4×105時的36.4降低到Re=1.5×105時的30.3),從而將顯著地削弱其長航時巡航性能,需要引起設計者的特別注意。

(a) CL~α
(b) CD~α
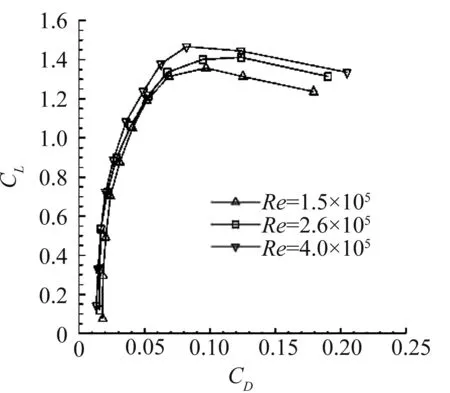
(c) CL~ CD
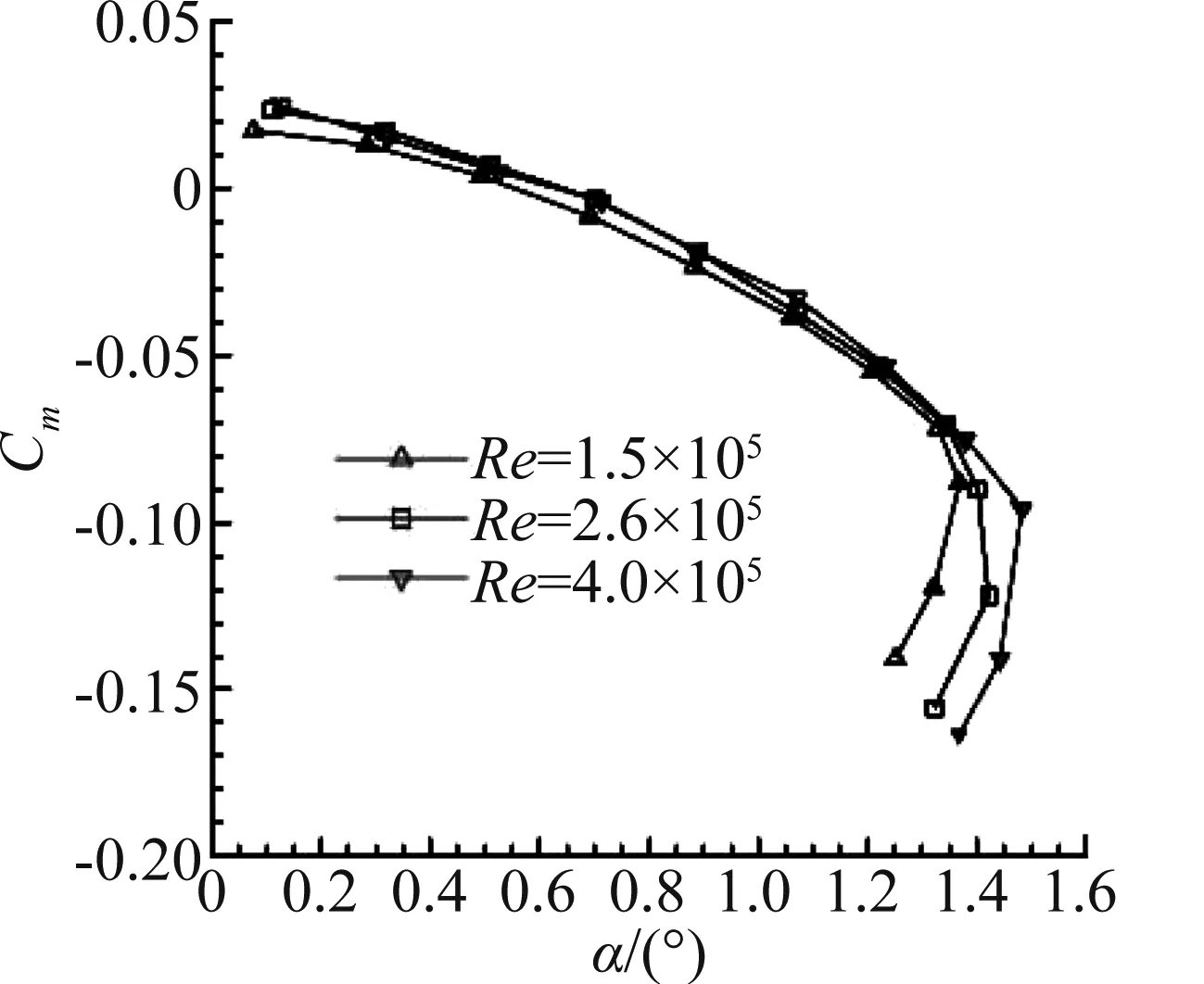
(d) Cm~α
3 彈性變形對高空長航時太陽能無人機氣動特性的影響
受光伏能源轉換效率及二次電池能量密度低的限制,高空超長航時太陽能無人機一般采用大展弦比大柔性機翼設計思想,在氣動載荷的作用下允許機翼產生較大的彎曲變形,以盡可能減輕結構重量,同時改善飛機飛行性能。太陽能無人機的大展弦比、輕質結構的設計特點使其在飛行中產生明顯的機翼結構靜變形,如“探路者”太陽能無人機平飛時機翼上翹量超過半展長的12%,“太陽神”飛機的機翼上反角最大可達到50°(極限飛行狀態下) ;“太陽神”太陽能無人機的展弦比達到了31,結構面密度為3.2 kg/m2,而常規動力的高空長航時無人機“全球鷹”的展弦比為25,機翼結構面密度卻達到53 kg/m2。較大的彈性變形,使得線彈性理論中的小變形假設不再成立,若仍堅持使用線彈性結構模型求解這類飛機的靜氣動彈性問題,甚至會得到相反的結論,因此研究這類飛機的靜氣動彈性問題時需要考慮柔性機翼大位移、大轉角等幾何大變形特征的非線性效應[44-49]。
為了說明大柔性結構幾何非線性變性特征,這里以一大柔性懸臂梁為例,懸臂梁一端固支約束,另一端受一集中作用彎矩M(單位為N·m),如圖18所示,臂梁長度L=20 m,EIz=10 N·m2,EA=10 N,集中彎矩M分別取0.2π、0.4π、0.6π、0.8π和π。其解析解是弧長為20m的一圓弧,圓心角θ=0.4π、0.8π、1.2π、1.6π和2π[50-51]。
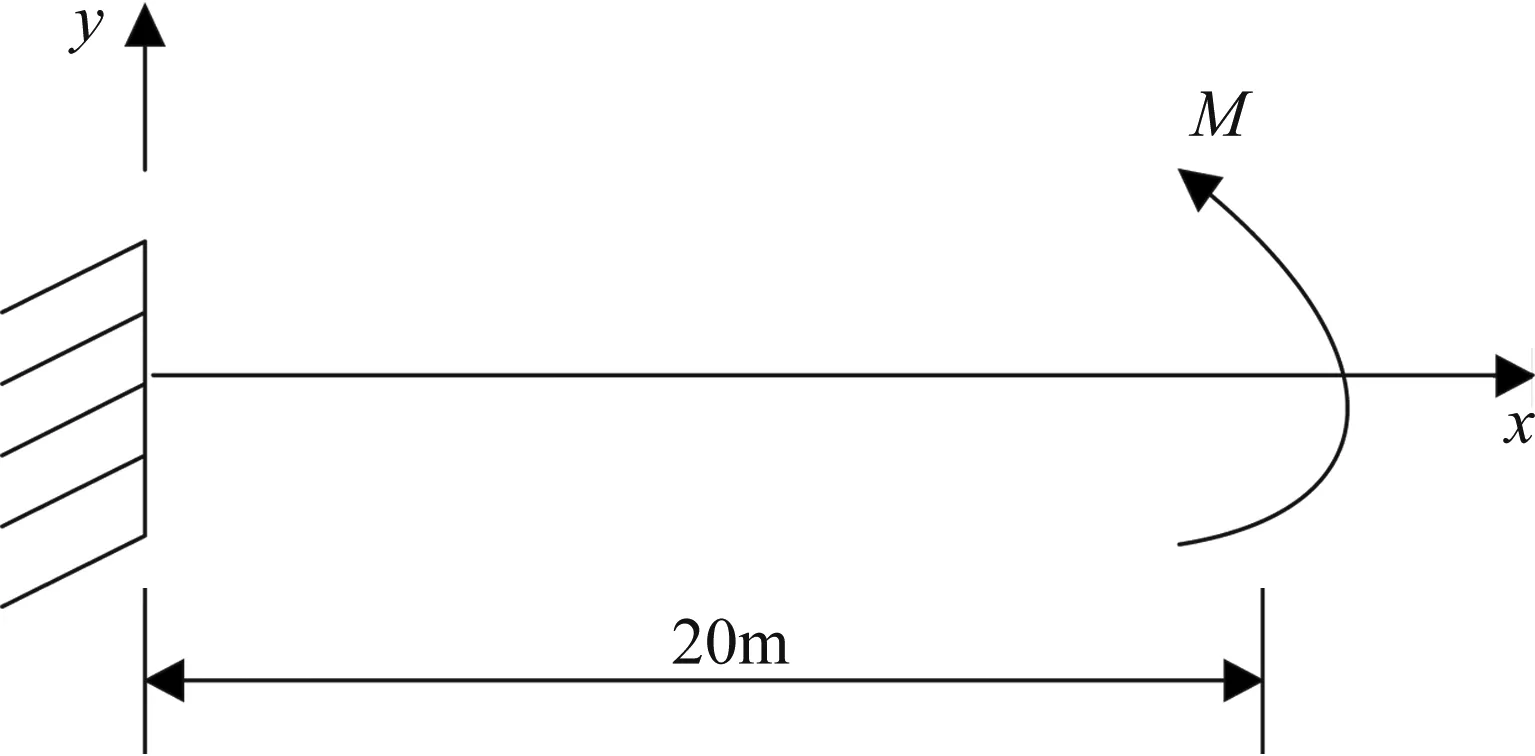
圖18 懸臂梁端部受集中彎矩載荷作用示意圖Fig.18 Cantilever beam under moment loading
王偉等[52]采用線性有限元理論和CR理論(共旋轉有限元法)對該大變形問題分別進行了求解,并與線性理論解和非線性理論解進行了對比。線性理論計算結果如圖19所示,隨著載荷的增加,懸臂梁端部沒有出現x方向的位移,y方向位移隨載荷的增加而線性增大,顯然不具有描述柔性結構幾何大變形中剛體旋轉部分的能力;采用非線性的CR理論的計算結果如圖20所示,隨著載荷的增加,大柔性懸臂梁逐漸變形成一個圓,較好地描述了剛體旋轉運動和彈性變形。
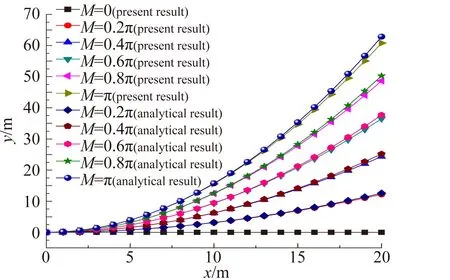
圖19 線性解Fig.19 Linear results
目前,研究彈性變形對飛機氣動特性的影響的主要途徑之一是耦合計算結構力學(CSD)和計算流體力學(CFD)求解器進行迭代求解。Romeo[21]等基于線性結構力學求解技術及CFD技術,研究了HELIPLAT太陽能無人機的靜氣動彈性問題;Palacios[53]研究了大展弦比復合材料柔性機翼的非線性靜氣動彈性問題;Joseph等[54]基于風洞實驗數據修正的氣動力模型并結合CFD數值模擬技術,研究了ARW-2機翼的靜氣動彈性問題;馬鐵林[55]等耦合NASTRAN和FLUENT研究了大展弦比柔性前掠機翼的氣動特性;范銳軍[56]等研究了大展弦比柔性飛翼布局無人機的靜氣動彈性特性等;史愛明[57]等采用結構影響系數法耦合CFD求解器研究了彈性機翼的跨聲速靜氣動彈性問題;成婉菊[58]等基于N-S方程開展了飛機靜氣動彈性計算方法方面的研究工作。
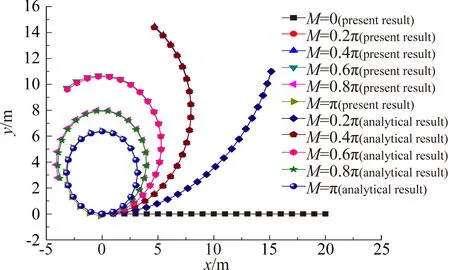
圖20 非線性解Fig.20 Nonlinear results
與一般飛機的線性靜氣動彈性效應一致,大柔性太陽能無人機機翼結構的非線性靜變形同樣會影響氣動載荷的重新分布及全機的縱向、橫航向力和力矩特性,主要區別是研究較大彈性變形對無人機的氣動特性(如升阻比、靜穩定導數等)的影響時,需要考慮結構幾何大變形效應,否則得到的結論是值得懷疑的。這里以某大柔性高空超長航時太陽能無人機為例,研究該無人機考慮幾何非線性效應的靜氣動彈性響應特性,其外形、結構參數、幾何尺寸如圖21及表1所示。
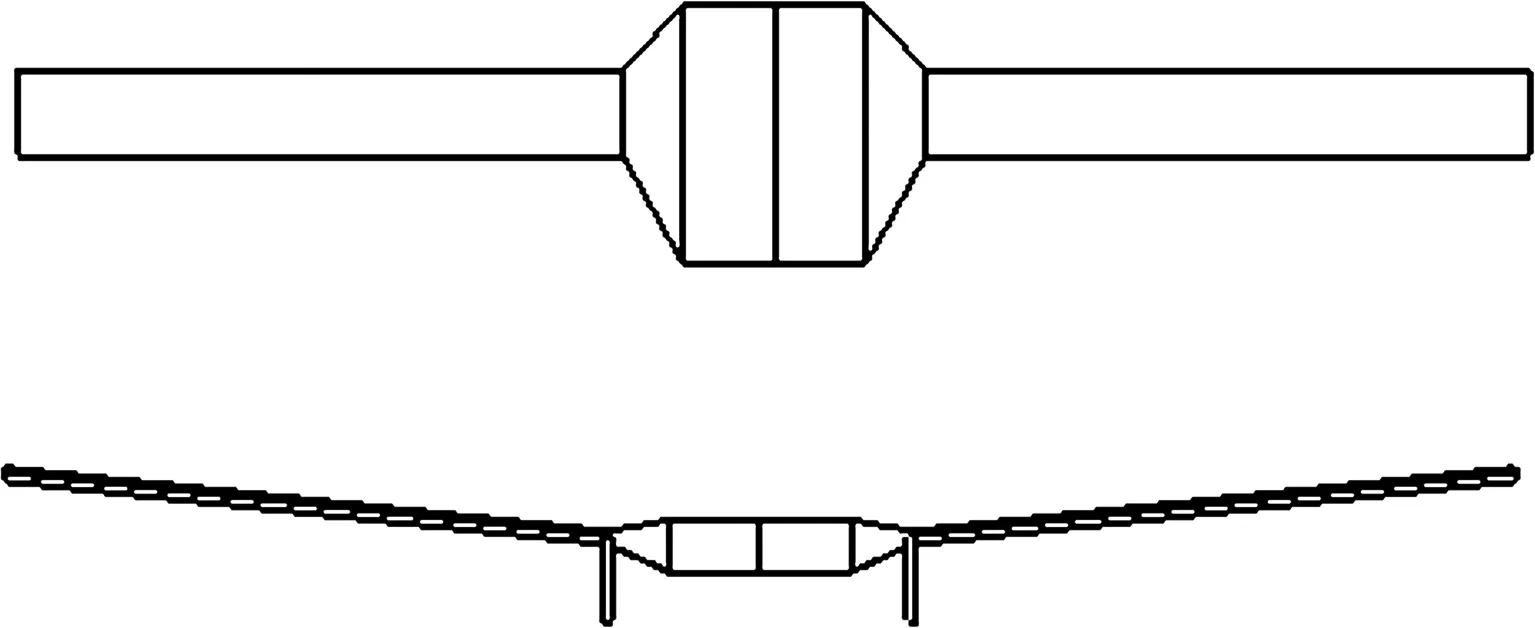
圖21 算例飛機布局示意圖Fig.21 Configuration of the research aircraft
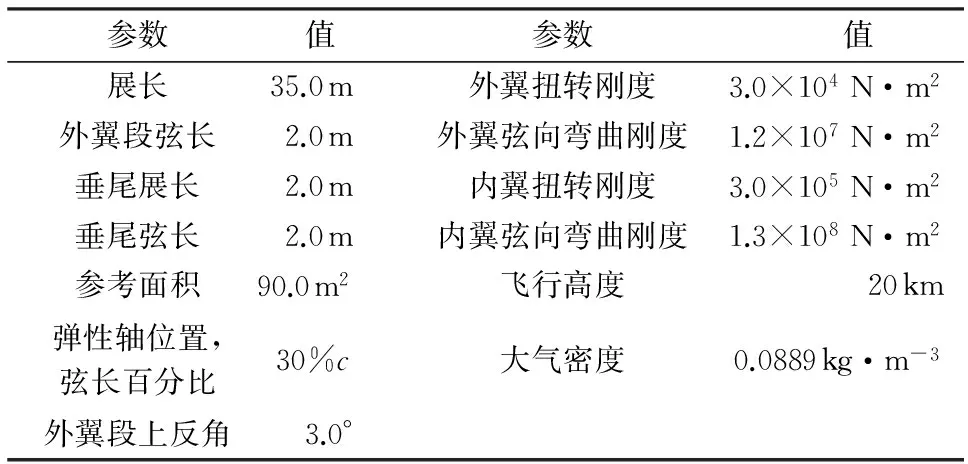
表1 柔性太陽能無人機模型參數Table 1 Model parameters of the flexible solar powered aircraft
假設無窮遠來流速度為30 m/s、飛機迎角為0°,此時雷諾數為3.7267×105;假設機翼彎曲剛度沿翼展方向均勻分布,以彎曲剛度作為變量,研究給定飛行條件下無人機的靜氣動彈性響應特性;隨后凍結彈性變形,研究各個彈性變形基準下無人機的全機氣動特性。靜氣動彈性求解收斂后,翼尖彎曲變形隨彎曲剛度變化的趨勢如圖22和圖23所示。
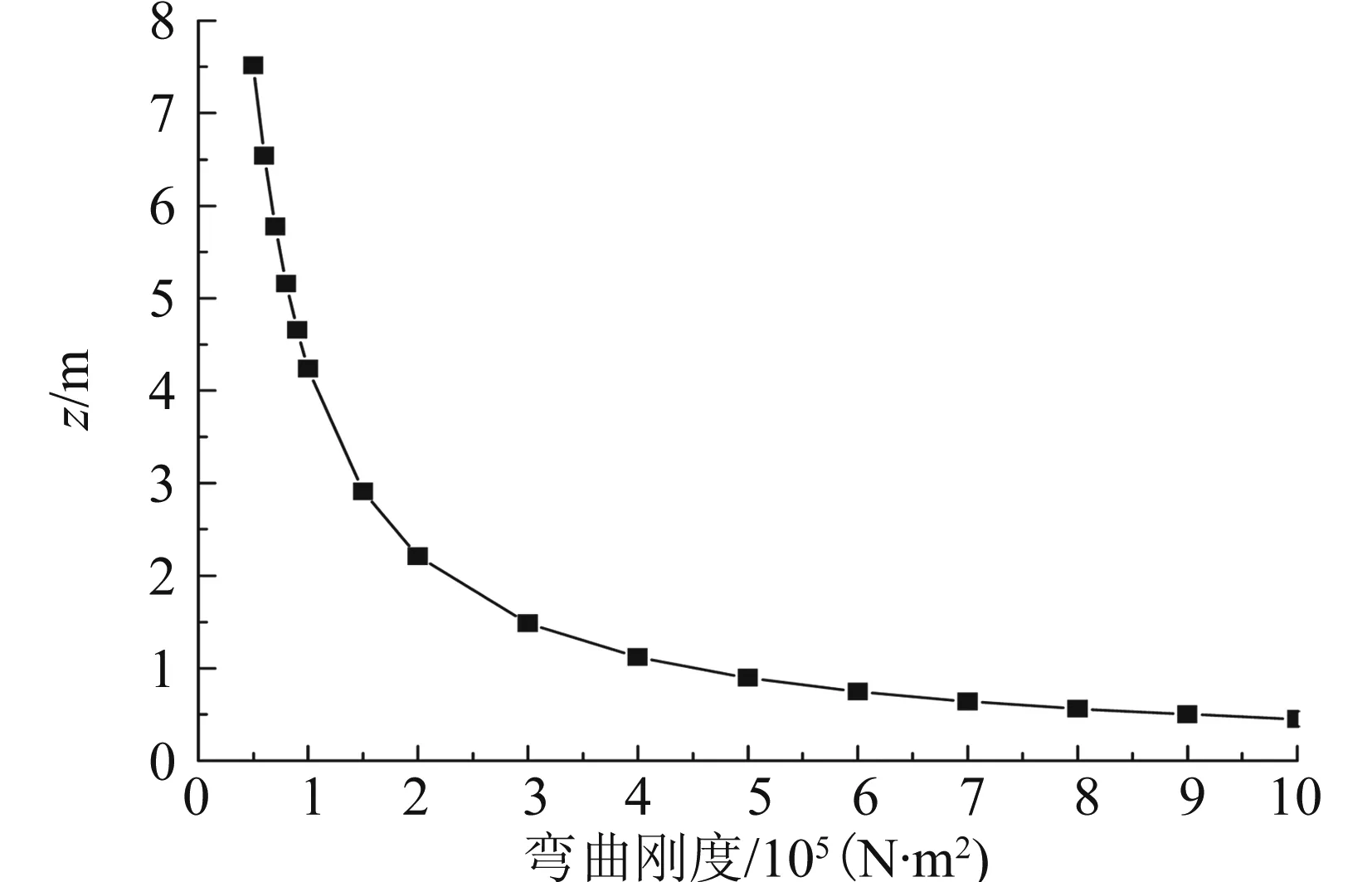
圖22 翼尖彎曲位移曲線Fig.22 Bending displacement of the wing tip
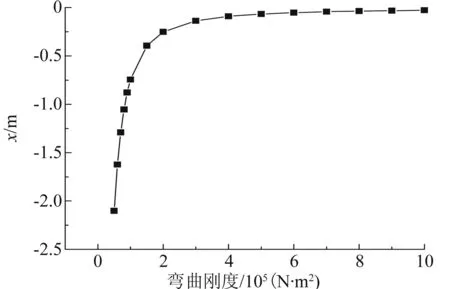
圖23 翼尖展向位移曲線Fig.23 Spanwise displacement of the wing tip
從圖22和圖23中的計算結果中可以看出,隨著彎曲剛度的減弱,翼尖彎曲變形和展向位移逐漸增加,并且增速越來越快。另外,當彎曲剛度大于5.0×105N·m2時,隨彎曲剛度的增加,彈性變形降低的趨勢越來越緩和,說明允許一定的變形可以大大降低對彎曲剛度的限制,從而有利于減輕結構重量。分別取彎曲剛度EI1=2.640×105N·m2、EI2=1.271×105N·m2、EI3=0.783×105N·m2、EI4=0.553×105N·m2為例,對應靜氣彈求解收斂時的翼尖彎曲位移為1.748 m(4.99%展長)、3.531 m(10.10%展長)、5.251 m(15.00%展長)、7.01 m(20.03%展長);隨后凍結此外形,研究各個變形下的氣動特性,以分析彈性變形對無人機氣動特性的影響,此時各個變形狀態下翼尖展向位移相當于縮短的有效展長為0.436 m(1.25%展長)、1.09 m(3.11%展長)、2.2 m(6.29%展長)、3.72 m(10.63%展長),上述各個彎曲剛度下的機翼靜變形如圖24所示。隨著彎曲剛度的降低,機翼彎曲變形愈大,并且翼尖展向位移越來越大,機翼當地剖面的法向量與全機有效升力方向的夾角越來越大,特別是在靠近翼尖的區域。可見,隨著彈性變形的增加,機翼氣動載荷作用方向將發生較大改變,若仍采用常規的線彈性理論描述無人機機翼結構的靜變形顯然會引起較大的誤差。
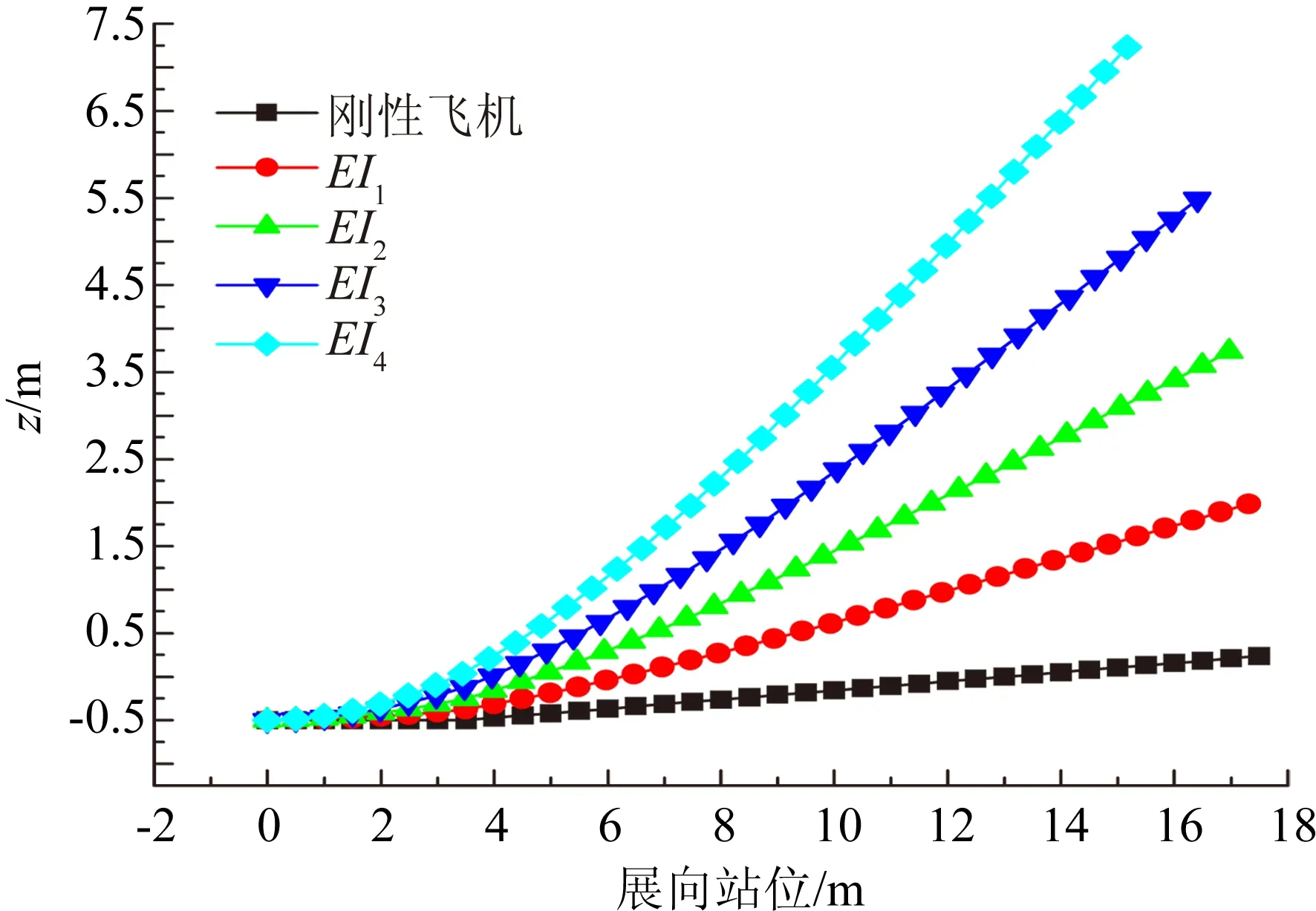
圖24 柔性機翼變形分布圖Fig.24 Deformation of the flexible wing
隨著彎曲剛度的降低,機翼彈性變形愈加顯著,局部氣動載荷的作用方向亦發生較大改變,變形后飛機的氣動特性研究對這類飛機的設計具有重要的參考價值。當地升力系數在展向的分布如圖25所示,25%弦長處的壓力分布如圖26所示。
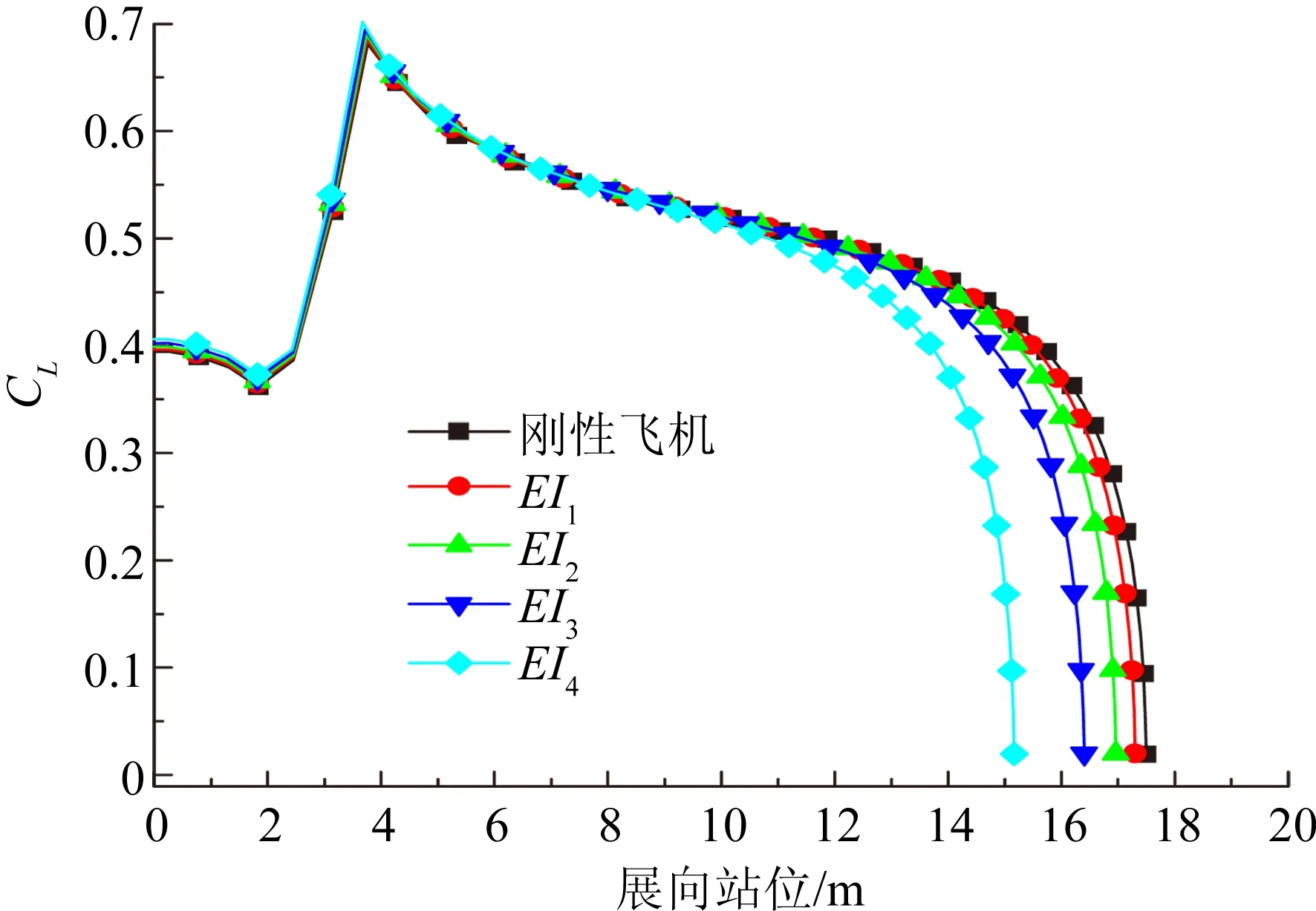
圖25 展向升力分布Fig.25 Lift distribution along the span
不同的彎曲剛度狀態下,靜氣動彈性求解收斂后,相距對稱面展向站位分別為6 m、10 m、14 m處的翼剖面壓力分布對比如圖27至圖29所示。隨著彈性變形的增加,越靠近翼尖處的剖面上下表面壓力差降低得越顯著。翼尖彎曲位移小于展長的10%時,彈性變形對這類布局飛機的氣動載荷影響較弱,此時彎曲剛度具有較大的設計空間;當翼尖彎曲變形更大時,彈性變形對氣動載荷的影響需要著重注意。因此,對這類以柔性設計思想為主的飛行器,盡可能高精度地描述機翼幾何非線性結構靜變形,進而合理地預測變形后氣動載荷的重新分布是這類飛機氣動設計應考慮的主要因素之一。
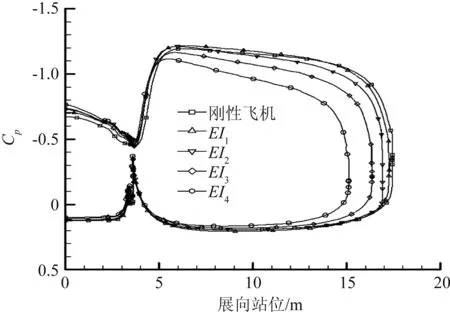
圖26 25%弦長處展向壓力分布Fig.26 Pressure distribution at 25% chord
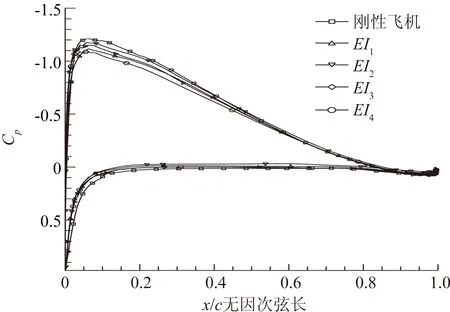
圖27 y=6 m處弦向壓力分布Fig.27 Pressure distribution at y=6 m
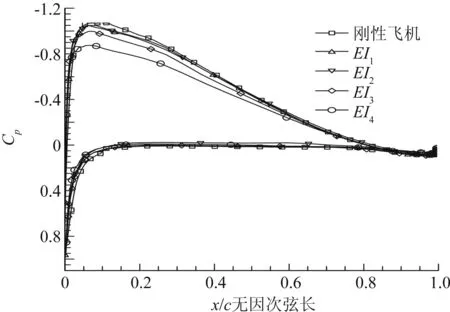
圖28 y=10 m處弦向壓力分布Fig.28 Pressure distribution at y=10 m
從圖27至圖29中的計算結果可以看出,彈性變形主要影響機翼上表面壓力分布,對下表面壓力分布的影響較弱。
考慮幾何非線性效應的靜氣動彈性求解收斂后,凍結氣動外形,研究彈性變形對全機氣動特性的影響如圖30至圖32所示。

圖29 y=14 m處弦向壓力分布Fig.29 Pressure distribution at y=14 m
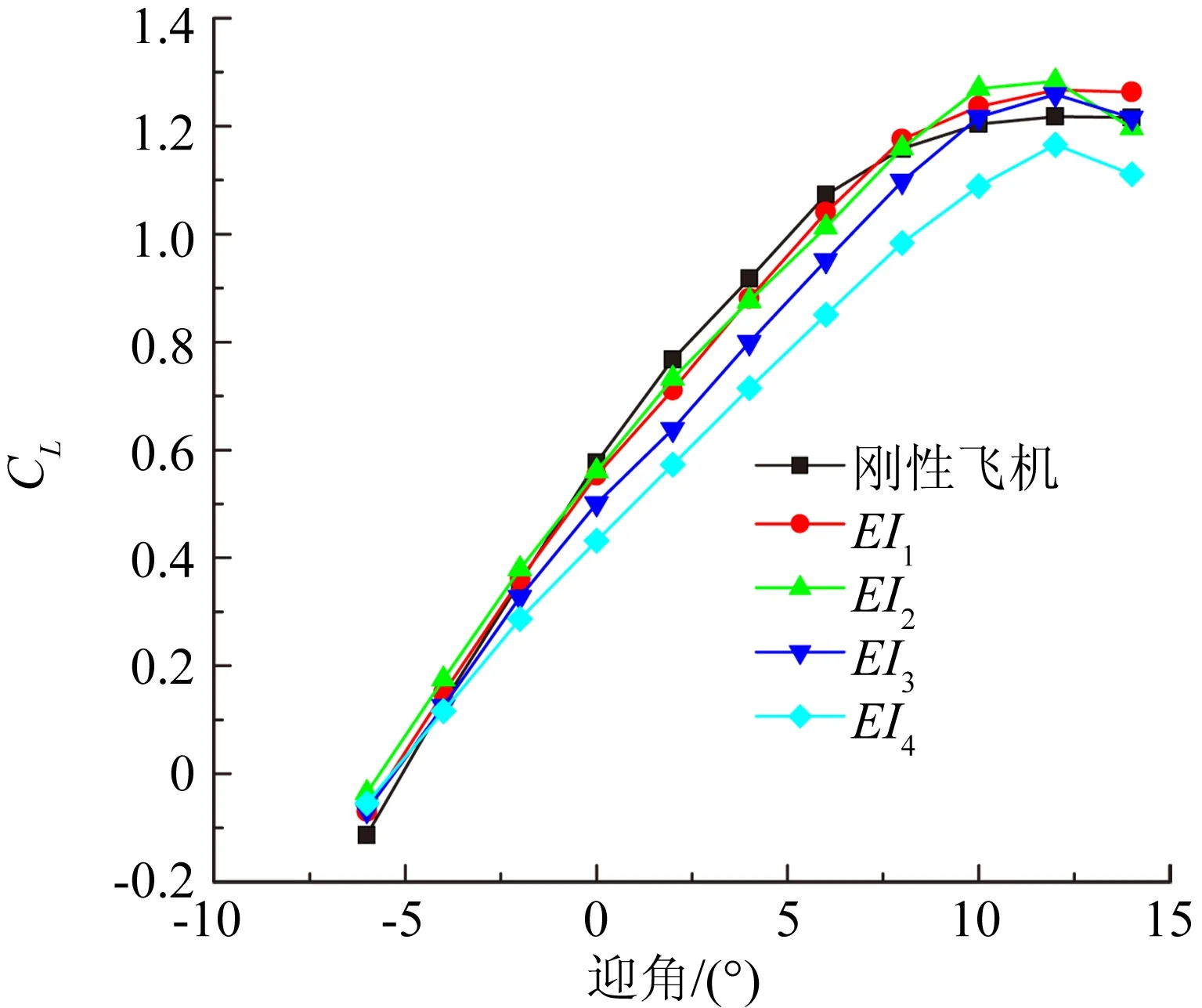
圖30 升力曲線Fig.30 Lift curve
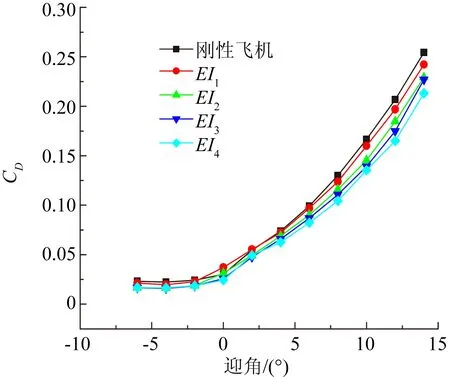
圖31 阻力曲線Fig.31 Drag curve
由圖30中的計算結果可以看出,當彎曲剛度較大時,靜氣動彈性效應對全機升力的影響較弱;隨著彎曲剛度進一步降低,同樣迎角下,升力系數減小得越來越顯著。主要是因為隨彎曲剛度的降低,扭轉剛度并不改變,由彎曲變形引起的氣動載荷的改變進而對扭轉變形造成的影響較弱。另外彎曲剛度較弱時,升力線斜率降低得非常明顯,在這類飛機的總體氣動設計時需要注意。
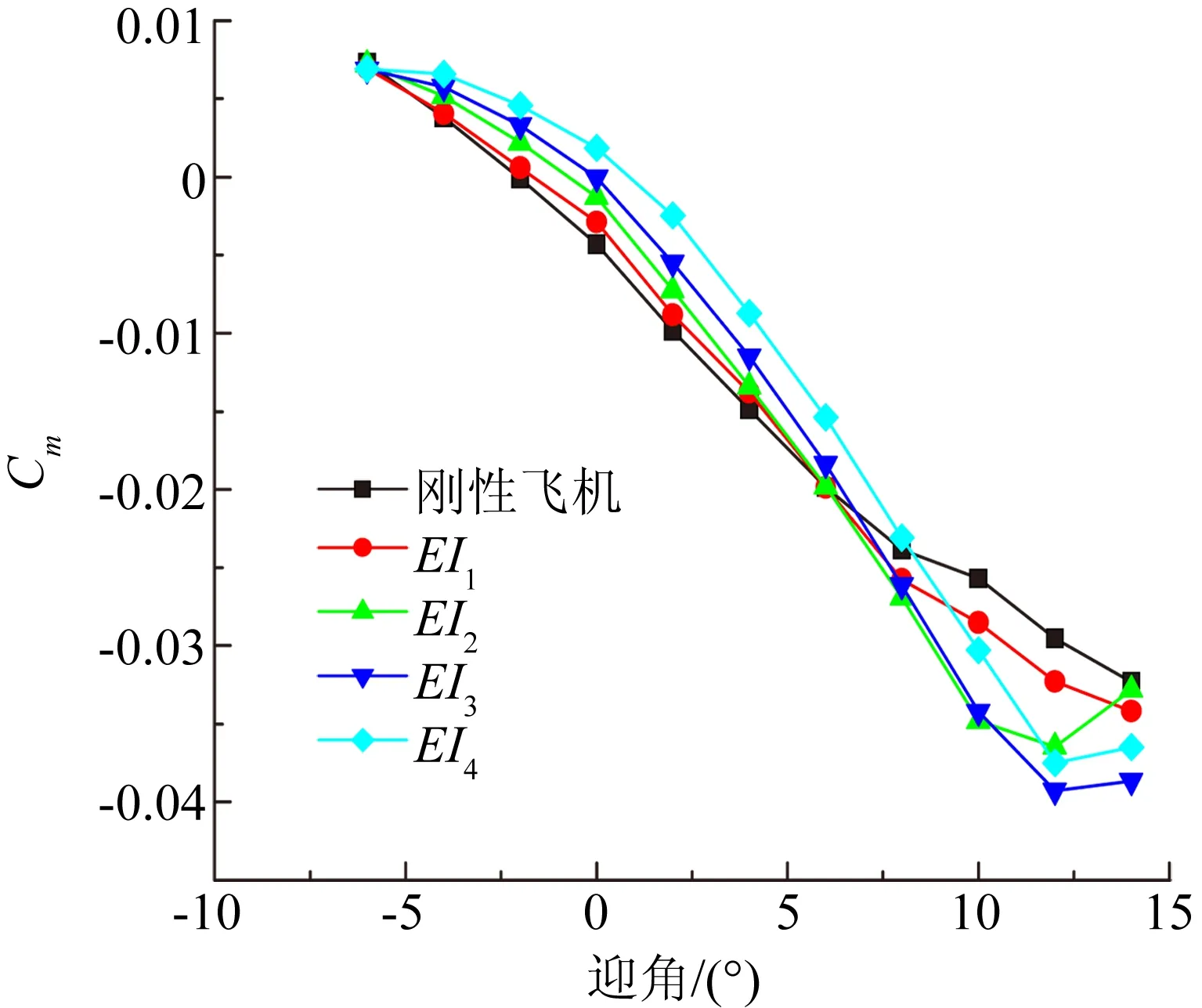
圖32 俯仰力矩曲線Fig.32 Pitching moment curve
由圖31中阻力系數曲線的變化趨勢可以看出,隨著彎曲剛度的減弱,在小迎角范圍內彈性變形對全機阻力的影響非常小;當迎角大于4°時,彈性變形的增加進一步降低了阻力系數,減小的原因可以歸因于升力的降低減小了一定的誘導阻力。
由圖32中力矩系數曲線,可以看出在迎角小于4°的線性區域內,相同迎角下,彎曲剛度越小,俯仰力矩系數越大,并且俯仰力矩斜率的絕對值隨變形的增加而增加。主要原因可以歸結為以下兩點:1) 隨著變形的增加,外側機翼靠近前緣區域內的壓力差降低得非常顯著,而變形對靠近后緣區域內的壓力差的影響較弱,引起了剖面壓力中心及全機氣動載荷分布的改變,最終導致全機焦點后移。2) 與機翼上反角為0°時,迎角的增加不會改變局部機翼的縱向位置不同;彈性變形的增加相當于增加了機翼的上反角,由于空間旋轉效應,隨著迎角的增加,局部升力面將向后偏移,從而使氣動焦點相對重心后移。
可見彈性變形顯著地改變了該無人機的俯仰力矩特性,有利于提升這類飛機的縱向靜穩定裕度,進而在全機氣動特性上有利于改善無人機的靜穩定性。
彎曲變形較大時,全機最大升阻比降低大約8%,主要是因為升力降低得比較明顯,而彈性變形對阻力的影響相對較弱;這一特性將削弱無人機的巡航性能,在總體設計階段中,預測這類無人機的航程參數時應考慮彈性變形對升阻性能的影響,否則可能會引起顯著的誤差。
在線性段對全機迎角-升力曲線和迎角-力矩曲線進行擬合,進而得到全機升力線斜率、俯仰力矩導數及縱向靜穩定裕度如表2所示,CLα表示升力線斜率、Cmα表示俯仰力矩導數、-Cmα/CLα表示靜穩定裕度。 由表2中的計算結果可以看出,隨著彎曲剛度的降低和彎曲變形的增加,無人機的升力線斜率呈現出逐漸下降的趨勢;當彎曲剛度降低到初始彎曲剛度的21%左右時(此時翼尖彎曲位移約為展長的20%),升力線斜率降低了18%左右;剛性以及幾種彎曲剛度狀態下無人機的俯仰力矩導數均小于0,說明無人機的縱向氣動特性依然是靜穩定的。另外,隨著彎曲剛度的降低,無人機俯仰力矩導數的絕對值逐漸增加,說明彈性變形的增加改變了算例布局無人機的縱向靜穩定性。隨著彎曲變形的增加,縱向靜穩定裕度由剛性飛機的3.276%提升到彈性飛機的4.66%(對應彎曲剛度EI4),增加了約42.3%,說明彈性變形對這類布局無人機縱向靜穩定裕度的改變是非常顯著的。由于這類布局無人機沒有水平尾翼,縱向靜穩定性一般配置較低,彈性變形對無人機縱向靜穩定性的改變具有一定的潛在利用價值,在這類飛機總體設計階段可以充分利用這一特點。
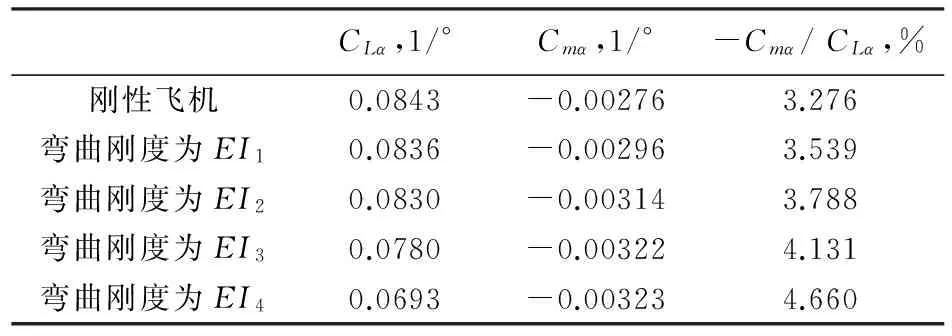
表2 無人機縱向氣動靜導數及穩定裕度Table 2 Static derivatives and stability margin of UAV
在氣動載荷的作用下,大柔性太陽能無人機將產生較大的彎曲變形,相當于增加了無人機機翼的上反角,如彎曲剛度為EI4時,相當于機翼的上反角增加了約24°,顯然該無人機的橫航向力矩特性將顯著地受到影響。無人機的滾轉力矩系數用Cl表示,偏航力矩系數用Cn表示,變形后上述系數的發展趨勢如圖33和圖34所示。
不同彈性變形狀態下,無人機的滾轉力矩導數和偏航力矩導數如表3所示,Clβ表示滾轉力矩導數,Cnβ表示偏航力矩導數。
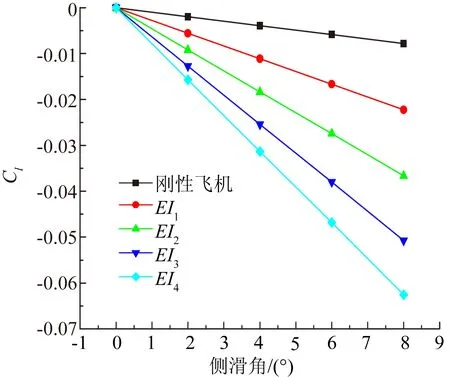
圖33 滾轉力矩系數曲線Fig.33 Rolling moment curve
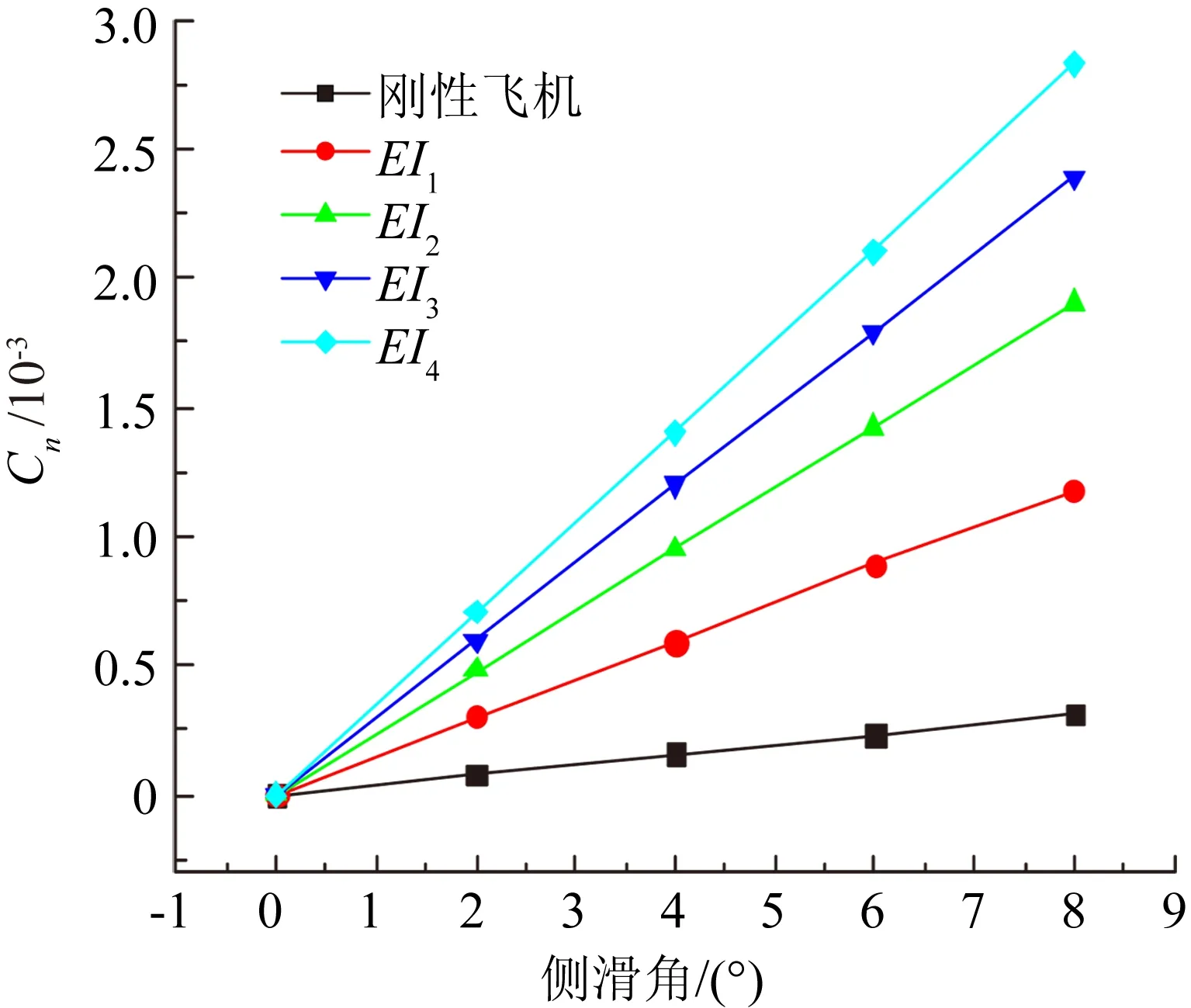
圖34 偏航力矩系數曲線Fig.34 Yawing moment curve

Clβ,1/°Cnβ,1/°剛性飛機-0.000980.00004彎曲剛度為EI1-0.002780.00015彎曲剛度為EI2-0.004580.00024彎曲剛度為EI3-0.006340.00030彎曲剛度為EI4-0.007820.00035
隨著彈性變形的增加,滾轉力矩導數的絕對值與偏航力矩導數都呈現出單調增加的趨勢;當彎曲剛度為EI4時,滾轉力矩導數的絕對值為剛性飛機的7.98倍,偏航力矩導數為剛性飛機的8.75倍,彈性變形顯著地改變了該無人機的橫航向靜穩定性。
大柔性太陽能無人機的靜氣動彈性效應,改變了無人機的橫航向靜穩定性;對于具有正常橫航向靜穩定性的飛機,當Cnβ/Clβ的絕對值過大時,飛機易產生螺旋不穩定;當Cnβ/Clβ的絕對值過小時,則飛機易產生荷蘭滾或飄擺不定;而彈性變形對Cnβ及Clβ影響較為顯著,在這類大柔性太陽能無人機的總體設計階段中機翼上反角等參數的確定時,應著重考慮彈性變形對其氣動特性及橫航向靜穩定性的影響。'
4 縮比自由飛驗證技術在高空長航時太陽能無人機高效氣動力設計中的應用
縮比自由飛驗證技術的主要特點是縮比模型在天空中飛行進行試驗,與風洞試驗技術中模型被支架支撐而受約束不同,可以完全避免風洞洞壁和支桿的約束和干擾。縮比自由飛驗證技術的主要特點有模型不受約束、試驗高度范圍大、試驗馬赫數范圍寬、可以模擬不同大氣狀態、試驗雷諾數高、綜合模擬能力強、無飛行員安全問題等,使得模擬條件真實,貼近真實飛行,而且形象、直觀,試驗結果更可靠、有效[59-60]。
中航工業一飛院通過縮比驗證機技術驗證了多個剛度下的太陽能無人機氣動特性,如圖35所示。通過設計不同剛度的機翼進行試飛試驗,還研究了多種靜氣彈效應下的全機氣動特性、操穩特性等,探索了該布局的飛行邊界,降低了研發技術風險,取得了較好的效果。

圖35 中航工業一飛院的太陽能無人機縮比驗證機Fig.35 Sub-scaled flight test model of solar powered UAV in AVIC the First Aircraft Institute
在開展縮比自由飛驗證技術時需要滿足的相似性準則有雷諾數、馬赫數、當量角速度和斯德魯哈爾數、弗勞德數、相對密度因子和相對慣性矩、氣動彈性彎曲和扭轉參數等[61-63]。一般情況下,縮比過程都是針對不可壓或可壓流試驗條件下的自由飛試驗。對于不可壓流動,動態特性都使用弗勞德數相似需求縮比得到的速度;對于可壓縮流動,壓縮性影響都通過滿足馬赫數相似的要求來確定。
5 結束語
高空長航時太陽能無人機一般采取“單設計點”的設計思想,對設計雷諾數、結構變形等多種設計約束的預測精度提出了更高的要求。本文主要對高空長航時太陽能無人機的高效氣動力設計挑戰及縮比驗證技術的應用開展了一定的研究,主要得到以下結論:
1) 高空長航時太陽能無人機的飛行雷諾數較低,設計雷諾數的略微變化將顯著地影響全機的巡航性能等,需要在該類飛機的總體氣動設計中引起設計者的特別注意。
2) 為了盡可能地減輕結構重量,高空長航時太陽能無人機的機翼結構設計一般采用柔性機翼設計思想,允許較大的彈性變形,將顯著地改變機翼的氣動載荷分布及全機的橫航向靜穩定性。對具有正常橫航向穩定性的飛機,當Cnβ/Clβ過大時,飛機易產生螺旋不穩定;當Cnβ/Clβ過小時,則飛機易產生荷蘭滾或飄擺不定,而彈性變形對該類飛機橫航向靜穩定性的影響比較明顯,在其總體氣動設計時,應考慮幾何大變形對氣動特性及橫航向穩定性的影響。
3) 縮比自由飛驗證技術在高空長航時太陽能無人機的總體氣動設計中可以較好地反應低雷諾數、彈性變形等對全機氣動特性的影響,又可以較好地避免技術風險、降低研發成本,在該類飛機的高效氣動力設計中具有較好的應用前景,值得進一步推廣。
[1]Cestino E. Design of very long-endurance solar powered UAV[D].[PhD Thesis]. Politecnico di Torino: Department of Aerospace Engineering , 2006.
[2]Gao Guanglin, Li Zhanke, Song Bifeng. Key technologies of solar powered unmanned air vehicle[J]. Flight Dynamics, 2010, 28(1): 1-4. (in Chinese)高廣林, 李占科, 宋筆鋒. 太陽能無人機關鍵技術分析[J]. 飛行力學, 2010, 28(1): 1-4.
[3]Haws T D, Bowman W J. Thermal analysis of the pathfinder aircraft. AIAA-99-0735[R]. Reston: AIAA, 1999.
[4]Deng Haiqiang, Yu Xiongqing. Solar aircraft: status and directions[J]. Aeronautical Science and Technology, 2006(1): 28-30. (in Chinese)鄧海強, 余雄慶. 太陽能飛機的現狀和發展趨勢[J]. 航空科學技術, 2006(1): 28-30.
[5]Youngblood J W. Design of long endurance unmanned airplanes incorporating solar and fuel cells propulsion. AIAA-84-1430[R]. Reston: AIAA, 1984.
[6]Bailey M D, Bower M V. High altitude solar powered platform[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 1992.
[7]Wang Yanguang, Li Jianquan, Li Yong, et al. Characteristics and application prospects of near space flying vehicles[J]. Spacecraft Engineering, 2007, 16(1): 50-57. (in Chinese)王彥廣, 李健全, 李勇, 等. 近空間飛行器的特點及其應用前景[J]. 航天器工程, 2007, 16(1): 50-57.
[8]Romeo G, Frulla G, Cestino E, et al. HELIPLAT: design, aerodynamic, structuralanalysis of long-endurance solar-powered stratospheric platform[J]. Aircraft, 2004, 41(6): 1505-1520.
[9]Chang Min, Zhou Zhou, Zheng Zhicheng. Flight principles of solar-powered airplane and sensitivity analysis of its conceptual parameters[J]. Journal of Northwestern Polytechnical University, 2010, 8(5): 792-796. (in Chinese)昌敏, 周洲, 鄭志成. 太陽能飛機原理及總體參數敏度分析[J]. 西北工業大學學報, 2010, 28(5): 792-796.
[10]Ma Dongli, Bao Wenzhuo, Qiao Yuhang. Study of flight path for solar-powered aircraft based on gravity energy reservation[J]. Acta Aeronautical et Astronauticasinica, 2014, 35(2): 408-416. (in Chinese)馬東立, 包文卓, 喬宇航. 基于重力儲能的太陽能飛機飛行軌跡研究[J]. 航空學報, 2014, 35(2): 408-416.
[11]Chang Min, Zhou Zhou, Li Yingying. An effective theoretical analysis of persistent flight altitude of solar-powered airplanes[J]. Journal of Northwestern Polytechnical University, 2012, 30(4): 541-546. (in Chinese)昌敏, 周洲, 李盈盈. 基于能量平衡的太陽能飛機可持續高度分析[J]. 西北工業大學學報, 2012, 30(4): 541-546.
[12]Wu Anmin. Solar-powered aircraft design and TRANSYS procedure simulation[D].[Master’s Thesis]. Xi’an: Northwestern PolytechnicalUniversity, 2003. 吳安民. 太陽能飛機設計計算與TRANSYS程序模擬[D].[碩士學位論文]. 西安: 西北工業大學, 2003.
[13]Deng Haiqiang. A study on integrated aerodynamic/structural/propulsive design of solar powered aircraft[D]. [Master’s Thesis]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2006. (in Chinese)鄧海強. 小型太陽能飛機氣動/結構/推進一體化設計研究[D].[碩士學位論文]. 南京: 南京航空航天大學, 2006.
[14]Tegeder T. Development of an efficient solar powered unmanned aerial vehicle with an onboard solar tracker[D]. Brigham Young University, 2007.
[15]Flittie K, Curtin B. Pathfinder solar-powered aircraft flight performance. AIAA-98-4446[R]. Reston: AIAA, 1998.
[16]TeetsE H Jr. Donohue C J, Wright P T. Meteorological support of the Helios world record high altitude flight to 96863feet. NASA/TM-2002-210727[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 2002.
[17]Garbe G, Montgomery E E. An overview of NASA’s solar sail propulsion project[C]//39thAIAA PAPER/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, July, 2003.
[18]Noll T E, Brown J M, Perez-Davis M E, et al. Investigation of the Helios prototype aircraft mishap[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 2004.
[19]Miller G D. Solar powered aerial vehicle. United States Patent Application 20090026316[P]. 2009, 1, 29. http: //www. freepatentsonline. com/y2009/0026316. html/
[20]Noth A, Siegwart R, Engel W. Design of solar powered airplanes for continuous flight[D]. Switzerland: Ingénieuren Microtechnique Ecole Polytechnique Fédérale de Lausanne, 2008.
[21]Romeo G, Frulla G. HELIPLAT: Aerodynamic and structural analysis of HALE solar powered platform. AIAA 2002-3504[R]. Reston: AIAA, 2002.
[22]Romeo G, Frulla G, Cestino E. A high-altitude long-endurance solar-powered unmanned air vehicle for multi-payload and operations[J]. Aerospace Engineering, 2006, 221(part G): 199-216.
[23]Ross H. Fly around the world with a solar powered airplane. AIAA-2008-8954[R]. Reston: AIAA, 2008.
[24]Laurenzo R. Soaring on a solar impulse[J]. Aerospace America, 2009: 32-36.
[25]Smith A M O, Transition G N. Pressure gradient and stability theory. Rep. ES-26388[R]. Long Beach, California: Douglas Aircraft Company , 1956.
[26]Van Ingen J L. A suggested semi-empiricalmethod for the calculation of the boundary layertransition region. Rep. VTH-74[R]. The Netherlands, Delft: Univ. of Delft, Dept. Aerospace Engineering, 1956.
[27]Thorwald H. Parabolized stability equationsin special courseon progress in transition modeling[R]. AGARD Report793, 1994.
[28]Malik M R, Li F. Transition studies for swept wing flows using PSE. AIAA-93-0077[R]. Reston: AIAA, 1993.
[29] Liu Z, Zhao W, Xiong G, et al. Direct numerical simulationof flow transition in high-speed boundary layers Aroundairfoils. AIAA-97-0753[R]. Reston: AIAA, 1997.
[30]Fasel H F, Meitz H L, Bachman C R. DNS and LES for investigatingtransition and transition control. AIAA-97-1820[R]. Reston: AIAA, 1997.
[31]WANG Kelei. Design of low Reynolds number airfoil[D].[Master’s Thesis]. Xi’an: Northwestern Polytechnical University, 2014. (in Chinese)王科雷. 低雷諾數翼型設計研究[D].[碩士學位論文]. 西安: 西北工業大學, 2014.
[32]Somers D M, Maughmer M D. Theoretical aerodynamicanalyses of six airfoils for useon small wind turbines[R]. NREL/SR-500-33295, 2003.
[33]Drela M. XFOIL: An analysis and design system for low Reynolds number airfoils. In: Mueller T J. Low Reynolds Number Aerodynamics[M]. Lecture Notes in Engineering, Springer, Berlin, Heidelberg, 1989, 54: 1-12.
[34]Zhang Qiang, Yang Yong. Numerical analysis of low-Reynolds -number flow over airfoil[J]. Acta Aerodynamica Sinica, 2006, 24(4): 482-486. (in Chinese)張強, 楊永. 繞翼型低雷諾數流動的數值分析研究[J]. 空氣動力學學報, 2006, 24(4): 482-486.
[35]Bai Peng, Cui Erjie, Zhou Weijiang, et al. Numerical simulation of laminar separation bubble over 2D airfoil at low Reynolds number[J]. Acta Aerodynamica Sinica, 2006, 24(4): 416-424. (in Chinese)白鵬, 崔爾杰, 周偉江, 等. 翼型低雷諾數層流分離泡數值研究[J]. 空氣動力學學報, 2006, 24(4): 416-424.
[36]Guan Jian, Guo Zheng. Numerical simulation of low-reynolds-number flows over the E387 airfoil[J]. Science Technologu and Engineering, 2013, 13(24): 7275-7281. (in Chinese)關鍵, 郭正. 繞翼型低雷諾數流動的數值仿真[J]. 科學技術與工程, 2013, 13(24): 7275-7281.
[37]Karasu I, Gen? MS, A?ikel HH. Numerical study on low Reynolds number flows over an aerofoil[J]. J. Appl. Mech. Eng., 2013, 2(5): 1000131.
[38]ChengTingting, Zhan Zhengke, QuKe. Prediction of transition and optimal roughness height based on transition model[J]. Aeronautical computing technique, 2012, 42(5): 75-79. (in Chinese)成婷婷, 張正科, 屈科. 用轉捩模型預測轉捩及確定最佳粗糙帶高度[J]. 航空計算技術, 2012, 42(5): 75-79.
[39]Sahin M, Hall J, Mohseni K. Direct numerical simulation of separatedlow-Reynolds number flows aroundan Eppler 387 airfoil[R]. University of Colorado at Boulder, USA.
[40]Li Chuanzheng, Zhou Zhou. Study on application of transition model on Low-Reynolds Number airfoil[C]//The 5th UAV conference in china, 2014. (in Chinese)李傳正, 周洲. 轉捩模型在低雷諾數翼型繞流中的應用研究[C]//第五屆中國無人機大會, 2014.
[41]Li Chuanzheng. Study on Low-Reynolds Number aerodynamics numerical simulation of solar powered UAV[D].[Master’s thesis]. Xi’an: Northwestern PolytechnicalUniversity, 2014. (in Chinese)李傳正. 太陽能飛行器低雷諾數氣動數值模擬方法研究[D].[碩士學位論文]. 西安: 西北工業大學, 2014.
[42]Zhou Zhou, Wang Zhengping, Zhu Xiaoping. A πtypical full wing solar powered UAV. ZL201310354084.4[P]. 2013. 周洲, 王正平, 祝小平等. 一種π型全翼式太陽能無人機. 中國, ZL201310354084.4[P]. 2013.
[43]Gan Wenbiao, Zhou Zhou, Xu Xiaoping. Aerodynamic numerical simulation of bionic full-wing typical solar powered unmanned aerial vehicle[J]. Acta Aeronautical et Astronautica Sinica, 2015, 36(10): 3284-3294. (in Chinese)甘文彪, 周洲, 許曉平. 仿生全翼式太陽能無人機啟動數值模擬[J]. 航空學報, 2015, 36(10): 3284-3294.
[44]Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. Static aeroelastic characteristics analysis of a very flexible solar powered UAV with geometrical nonlinear effect considered[J]. Journal of Northwestern Polytechnicle University, 2014, 32(4): 499-504. (in Chinese)王偉, 周洲, 祝小平, 等. 考慮幾何非線性效應的大柔性太陽能無人機靜氣動彈性分析[J]. 西北工業大學學報, 2014, 32(4): 499-504.
[45]Wang Wei, Zhou Zhou, Zhu Xiaoping. Solar array mounting effects on flutter characteristics of solar powered UAV[J]. Advanced Materials Research, 2014, (940): 410-414. Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. Exploring aeroelstic stability of very flexible solar powered UAV with geometrically large deformation[J]. Journal of Northwestern Polytechnical University, 2014, 32(4): 499-504. (in Chinese)王偉, 周洲, 祝小平, 等. 幾何大變形太陽能無人機非線性氣動彈性穩定性研究[J]. 西北工業大學學報, 2015, 33(1): 1-8.
[46]Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. A CR theory-based approach for solving nonlinear aeroelasticityof very flexible wing[J]. Journal of Vibration and Shock, 2014, 32(4): 499-504. (in Chinese)王偉, 周洲, 祝小平, 等. 一種基于CR理論的大柔性機翼非線性氣動彈性求解方法[J]. 振動與沖擊, 2015, 34(19): 62-70.
[47]Wang Wei, Zhou Zhou, Zhu Xiaoping, et al. CR approach of nonlinear trim and flight load analysis of very flexible solar powered UAV[J]. Journal of Northwestern Polytechnical University, 2015, 33(4): 566-572. (in Chinese)王偉, 周洲, 祝小平, 等. 基于CR理論的大柔性太陽能無人機非線性配平及飛行載荷分析[J]. 西北工業大學學報, 2015, 33(4): 566-572.
[48]Wang Wei, Zhu Xiaoping, Zhou Zhou, et al. A method for nonlinear aeroelasticity trim and stability analysis of very flexible aircraft based on co-rotational theory[J]. Journal of Fluids and Structures, 2016, 62: 209-229. Lyu Hexiang, Zhu Jufen, Ma Liying. Geometrically nonlinearity analysis of large rotation beams[J]. Compute Structural Mechanical and Application, 1995, 12(4): 485-490. (in Chinese)呂和祥, 朱菊芬, 馬莉穎. 大轉動梁的幾何非線性分析討論[J]. 計算結構力學及應用, 1995, 12(4): 485-490.
[49]Cai Songpo, Shen Pusheng. CR approach for finite element analysis of 2-D beams with large rotation[J]. Engineering Mechanics, 2006, 23(supplement 1): 69-72. (in Chinese)蔡松柏, 沈蒲生. 大轉動平面梁有限元分析的共旋轉坐標法[J]. 工程力學, 2006, 23(增刊1): 69-72.
[50]Wang Wei. Nonlinear aeroelasticity and flight dynamics analysis of very flexible solar powered UAV [D].[Phd. Thesis]. Xi’an: Northwestern Polytechnical University, 2015. (in Chinese)王偉. 太陽能無人機非線性氣動彈性及飛行力學研究[D].[博士學位論文]. 西安: 西北工業大學, 2015.
[51]Palacios R, Cesnik C. Static nonlinear aeroelasticity of flexible wing in compressible flow. AIAA-2005-1945[R]. Reston: AIAA, 2005.
[52]Hepp J P III. Static aeroelastic analysis of the ARW-2 wing including correlation with experiment[D]. Department of Mechanical Engineering and Material Science Duke University, 2005.
[53]Ma Tielin, Ma Dongli, Zhang Hua. Aerodynamics analysis of very flexible high aspect ratio wing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(7): 781-784. (in Chinese)馬鐵林, 馬東立, 張華. 大展弦比柔性機翼的氣動特性分析[J]. 北京航空航天大學學報, 2007, 33(7): 781-784.
[54]Fan Ruijun, Feng Zhaohui, Zhou Zhou. Static aeroelastic investigation of large aspect ratio UAV[J]. Chinese Quarterly of Mechanics, 2009, 30(4): 548-554. (in Chinese)范銳軍, 馮朝輝, 周洲. 大展弦比無人機的靜氣彈問題計算及分析[J]. 力學季刊, 2009, 30(4): 548-554.
[55]Shi Aiming, Yang Yongnian, Wang Gang. Investigation of characteristics of static aeroelasticity for large elastic wing in transonic flow[J]. Engineering Mechanics, 2006, 23(5): 173-176. (in Chinese)史愛明, 樣永年, 王剛. 彈性機翼跨音速靜氣動彈性問題研究[J]. 工程力學, 2006, 23(5): 173-176.
[56]Cheng Wanju. Numerical studies of aircraft static aeroelasticity based on N-S equations[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2008. (in Chinese)成婉菊. 基于N-S方程的飛機靜氣動彈性計算方法研究[D]. 南京: 南京航空航天大學, 2008.
[57]Zhang Shouxin. Model free-flight test[M]. Beijing: NationDefence Industry Press, 2002. (in Chinese)張守信. 模型自由飛試驗[M]. 北京: 2002.
[58]Chester H W, James S B, Bowman J R, et al. Similitude requirements and scaling relationships as applied to model testing[R]. NASA Technical Paper 1435.
[59]Von Doenhoff A E. Principles of model testing. High speed aerodynamics and jet propulsion. In: Donovan A F, Lawrence H R , Goddard F E, et al. High speed problems of aircraft and experimental method[M]. Princeton Univ. press, 1961.
[60]Holleman E C. Compiler: Initial results from flight testing a large, remotely piloted airplane model. NASA TM X-56024[R]. Hanover (Maryland, United States): NASA Center for Aerospace Information, 1974.
[61]Layton G P. NASA flight research center scale F-15 remotely piloted research vehicle program[C]//Advancements in flight test engineering proceedings of the fifth annual symposium, Soc. of flight test ENG., 1974: 1-63 to 1-76.
Challenges of high efficiency aerodynamics design for HALE solar powered UAV
Duan Zhuoyi, Wang Wei*, Geng Jianzhong, Zhang Jian, Li Junfu
(TheFirstAircraftInstituteofAVIC,Xi’an710089,China)
High Altitude Long Endurance (HALE) solar powered Unmanned Aerial Vehicle(UAV) has the design characteristics of low flying Reynolds number and very flexible wing. The single point design concept is usually introduced to the aerodynamics design of such aircraft. By this design concept, a relatively excellent aerodynamic characteristics can be obtained at the preconcert design state. However, these characteristics are usually weakened significantly if the design point has a slightly departure. First, the developed history and the design characteristics of solar powered UAV are reviewed. Second, we introduce the design challenges of high efficiency low Reynolds Number aerodynamics and the effect of static aeroelastics. Finally, the scaled free flying validation technique is prospected in the application of high efficiency aerodynamics design of HALE solar powered UAV.
solar powered UAV; low Reynolds number; aerodynamics design; aeroelastics; scaled free flying; single design point
0258-1825(2017)02-0156-16
2017-01-05;
2017-02-06
段卓毅(1966-),男,博士, 博導,研究員,研究方向:飛行器總體氣動設計等. E-mail: lcrong2015@163.com
王偉*, E-mail: weiwang1461@126.com
段卓毅, 王偉, 耿建中. 高空長航時太陽能無人機高效氣動力設計新挑戰[J]. 空氣動力學學報, 2017, 35(2): 156-171.
10.7638/kqdlxxb-2017.0012 Duan Z Y, Wang W, Geng J Z. Challenges of high efficiency aerodynamics design for HALE solar powered UAV[J]. Acta Aerodynamica Sinica, 2017, 35(2): 156-171.
V217+.4;V216.7
A doi: 10.7638/kqdlxxb-2017.0012
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
中華詩詞(2020年1期)2020-09-21 09:24:52
當代陜西(2019年11期)2019-06-24 03:40:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
