飛機大部件數字化對接仿真技術研究
2017-05-02 23:52:52李麗娟林雪竹
制造業(yè)自動化 2017年3期
鄭 博,李麗娟,林雪竹
(長春理工大學 光電工程學院,長春 130022)
飛機大部件數字化對接仿真技術研究
鄭 博,李麗娟,林雪竹
(長春理工大學 光電工程學院,長春 130022)
本課題提出飛機大部件數字化對接仿真技術,以此提高飛機大部件對接量。研究了大部件裝配對接當前位姿與目標位姿的參數求解方法。利用所求參數對大部件實際裝配對接過程進行虛擬動態(tài)仿真,模擬真實對接狀態(tài),通過干涉分析提前預估實際裝配過程中可能出現的裝配問題,優(yōu)化對接方案,輔助裝配人員在裝配之前及時解決問題,減少重復裝配次數減輕操作人員的勞動量,提高裝配質量與裝配效率。
大部件對接;虛擬仿真;干涉分析
0 引言
在飛機大部件對接過程中,以傳統(tǒng)方式進行對接裝配時,經常會出現對接基準的碰撞,以及對接完成時對接部件與理論位置姿態(tài)不符等現象。造成這些現象原因的可能是對接基準的加工質量誤差大,對接部件的對接位姿調節(jié)不到位以及對接流程方案規(guī)劃不合理等原因。且大部件對接的工序復雜,對接影響因素繁多是飛機制造中問題多發(fā)環(huán)節(jié),每遇到一個問題,操作人員都要停止對接工作,進行問題的排查,甚至需要重新規(guī)劃對接方案。這樣給操作人員帶來了巨大的工作量,嚴重延長了飛機制造周期,加大了飛機制造成本。大部件數字化對接仿真能夠有效的反饋真實對接狀態(tài),評估對接方案的合理性并對其進行優(yōu)化,極大的提高對接質量與裝配效率。
1 接位姿參數求解
1.1 當前位姿
本文采用加權最小二乘牛頓迭代法對移動部件的當前位姿參數求解,以精確的獲得飛機移動部件的位置信息與姿態(tài)信息。
設在移動部件坐標系下的調姿基準點坐標為,在飛機對接全局坐標系{G}坐標為:,其位姿向量表示為。
飛機大部件的位姿調整后,在對接全局坐標系下的調姿基準點存在的位姿誤差為。
令目標函數為:

其中,ωi表示調姿基準點i的測量不確定度的權值;

1.2 目標位姿
為了尋找滿足飛機大部件裝配的所有約束條件的最佳位姿狀態(tài),是飛機移動部件目標位姿優(yōu)化的目的。將飛機的6個位姿調姿參數作為裝配目標位姿的優(yōu)化變量即視為未知參數。
設6個位姿調姿參數構成的向量為:

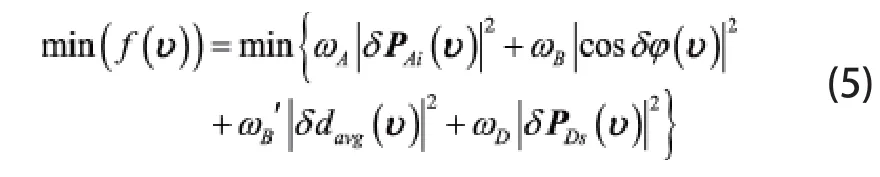
飛機機身移動部件的優(yōu)化目標位姿受多種因素影響,其中包括對接質量評估點位置誤差定位銷與定位孔的同軸度誤差、對接平面間隙誤差以及調姿基準點的位置誤差等因素。因此,它是一個多目標優(yōu)化求解的過程,求解時要賦予每個目標因素一個權重系數。根據目標誤差模型,以平方加權方式構造目標函數:

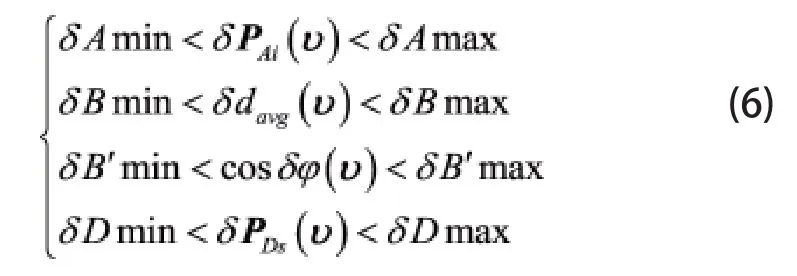
目標函數的最小值即為裝配對接部件優(yōu)化后的最佳位姿,有:
其中,各項位置誤差均在允許的條件內,有:
遺傳算法是由上世紀70年代Holland教授提出的,該算法的思想來源是生物遺傳學與進化學理論[1]。本將文采用遺傳算法對目標函數進行優(yōu)化求解。如圖1所示為優(yōu)化求解流程。
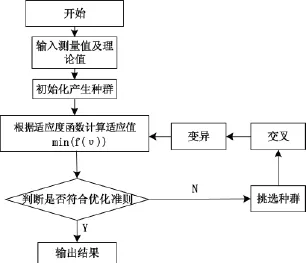
圖1 遺傳算法優(yōu)化求解多目標函數流程
具體算法步驟如下:
步驟2:計算每個參數個體在種群中的適應度。
步驟3:進行優(yōu)化準則判斷,若符合,該個體為最優(yōu)解輸出結果;反之,執(zhí)行步驟4操作。
步驟4:以選擇概率pi,執(zhí)行選擇算子,從當前群體中挑選部分種群作為下一代種群。
步驟5:以交叉概率ps(一般取0.4~0.99),執(zhí)行交叉算子,產生新的種群。
步驟6:為了保持種群多樣性,以變異概率pm(一般取0.0001~0.1),執(zhí)行變異算,產生新種群。
步驟7:由交叉和變異產生新一代種群代入步驟2重復計算。
2 對接可視化仿真流程
通過逆向重構等方法構建全三維數字化虛擬對接裝配環(huán)境以及各部件,將優(yōu)化求解獲得大部件位姿參數輸入虛擬環(huán)境,實現飛機大部件對接裝配過程的全三維動態(tài)仿真。合理的規(guī)劃路徑,通過對接裝配動態(tài)仿真反饋的結果,不斷的調整對接裝配方案,優(yōu)化對接路徑,實現高精度對接裝配,有效的節(jié)省時間,減輕實際操作人員的工作量,提高效率。
飛機大部件對接裝配可視化仿真流程如圖2所示。
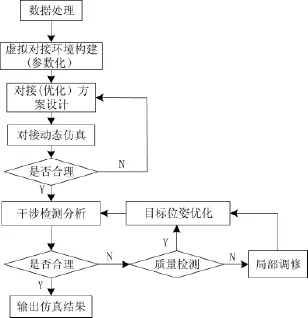
圖2 飛機大部件對接裝配可視化流程
3 仿真實驗
3.1 實驗方法
當實際對接 環(huán)境按照整個測量仿真系統(tǒng)搭建完畢,同時移動部件當前位姿測量精度達到對接設計要求,可以開始測量移動部件上的對接調姿基準點以及飛機移動部件當前位姿,通過本文研究的多目標優(yōu)化求解方法,計算出最佳位置的目標位姿參數,確定驅動定位器各方向的移動量,從而規(guī)劃裝配對接路徑,進行飛機大部件對接過程仿真,分析干涉檢測分布結果,若不符合對接標準,更改參數權重,重復仿真,并再次進行干涉檢測,直到檢測結果達到對接標準,最后輸出結果。

表1 移動部件當前位姿參數

表2 裝配目標位姿
對測量移動部件的當前位姿優(yōu)化求解,如表1所示。
基于裝配對接的工藝要求,調姿基準點位置和接頭基準點的位置的允許誤差均在±0.2mm以內 ,對接質量評估點位置的允許誤差為±0.5mm以內,對接平面間隙在0.5mm以內,接頭配合的同軸度允許誤差在±0.01°以內。對測量移動部件的當前位姿優(yōu)化求解,如表2所示。
3.2 動態(tài)仿真
在進行飛機大部件裝配對接動態(tài)仿真時,可實時反饋碰撞情況,通過分析干涉情況 ,判斷目標位姿重新優(yōu)化或是對接方案做出合理的優(yōu)化調整。
如圖3所示,飛機大部件對接過程存在明顯干涉情況,需要對目標位姿重新優(yōu)化。
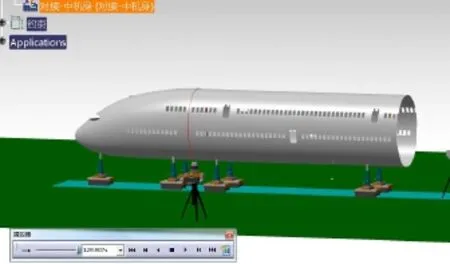
圖3 仿真對接過程的碰撞情況
如圖4為目標位姿重新優(yōu)化后的對接過程,雖然仍有碰撞提示,但肉眼已無法明顯分辨出干涉位置,此時應通過可視化干涉檢測方法,分析對接精度是否達到誤差范圍內,確定目標位姿是否需要重新優(yōu)化。
4 仿真干涉分析
完成對接仿真后,對大部件配合部位進行可視化干涉檢測,經過計算得,在虛擬裝配對接環(huán)境下,最大干涉值為-0.126mm,最小值為+0.043mm,在干涉檢測結果中“+”代表間隙“-”代表碰撞,

圖4 對接部件目標位姿重新優(yōu)化結果
因此前者是碰撞干涉,后者是間隙干涉,結果滿足精度要求。飛機對接基準部件的干涉檢測結果如圖4所示。
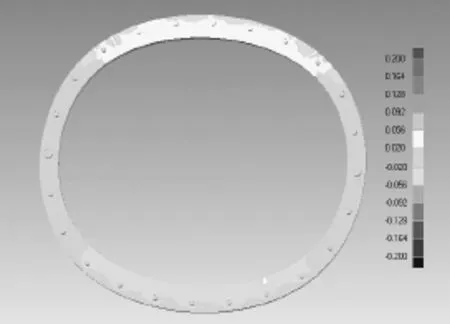
圖5 機身對接部位的干涉檢測分布
對圖5分析可知,該干涉檢測分布具有一定的趨勢,初步判斷由對接面法向量的夾角造成,雖然已達到允許對接誤差范圍內,仍然可以進一步優(yōu)化,重新分配目標函數的權重,獲得更優(yōu)的裝配目標位姿。
再次經過計算得,在虛擬裝配對接環(huán)境下,最大干涉值為-0.1016mm,最小干涉值為+0.0276mm,前者為碰撞干涉,后者為間隙干涉,此次結果滿足精度要求,并且目標位姿狀態(tài)優(yōu)于前者。
對接基準干涉檢測分布結果如圖6所示。
【】【】
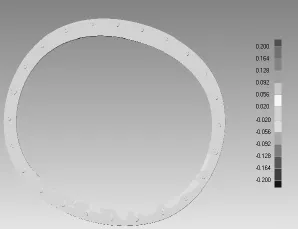
圖6 二次優(yōu)化基準部件的干涉檢測分布
由此次干涉檢測結果可以看出,對接部件的小部分干涉值在0.056mm左右,且顏色趨于藍色部分說明碰撞干涉在0.056mm左右,整體干涉分布在0.02mm內,并且沒有明顯的顏色分布趨勢,由結果可知目標位姿優(yōu)化良好。
5 結論
通過對飛機大部件對接虛擬仿真,有效的反映了飛機大部件真實對接狀態(tài),直觀的體現大部件裝配質量,通過不斷地仿真分析與位姿參數優(yōu)化,使大部件對接趨近于最佳狀態(tài),相對于傳統(tǒng)對接方法,減去了操作人員實際裝配過程中對部件不斷調整的工序,提高了對接精度以及裝配效率。
[1] Williams G,Chalupa E, Rahhal S. Automated positioning and alignment systems[R].SAE Technical Paper,2000.
[2] Kang S,Tesar D.A Noble 6-DOF Measurement Tool with Indoor GPS for Metrology and Calibration of Modular Reconfigurable Robots, Istanbul[C].IEEE ICM International Conference on Mechatronics,Turkey,2004.
[3] 秦政琪,范振偉.飛機薄壁組件數字化柔性裝配研究[J].沈陽航空工業(yè)學院學報,2009,26(3):1-4.
[4] 范玉青.現代飛機制造技術[M].北京:北京航空航天大學出版社,2001.5.
[5] 張旭.飛機大部件對接裝配過程中的干涉檢測技術研究[D].浙江大學,2008.
[6] 徐靚.飛機大部件數字化對接虛擬裝配技術研究[D].長春理工大學,2014.
[7] 朱永國.飛機大部件自動對接若干關鍵技術研究[D].南京航空航天大學,2012.
Research on digital docking simulation technology for aircraft large parts
ZHENG Bo, LI Li-juan, LIN Xue-zhu
V262.4
:A
1009-0134(2017)03-0149-03
2017-01-13
鄭博(1990 -),男,長春人,碩士,主要從事光電精密測量與數字化裝配方面的研究。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
