
折疊三角警示牌移動(dòng)機(jī)器人的設(shè)計(jì)與實(shí)現(xiàn)
2017-05-02 23:52:48程詩(shī)豪李大寨
制造業(yè)自動(dòng)化 2017年3期
關(guān)鍵詞:移動(dòng)機(jī)器人設(shè)計(jì)
陳 林,程詩(shī)豪,李大寨
(1.北京航空航天大學(xué) 機(jī)械工程及自動(dòng)化學(xué)院,北京 100191;2.北京市第二中學(xué),北京 100010)
折疊三角警示牌移動(dòng)機(jī)器人的設(shè)計(jì)與實(shí)現(xiàn)
陳 林1,程詩(shī)豪2,李大寨1
(1.北京航空航天大學(xué) 機(jī)械工程及自動(dòng)化學(xué)院,北京 100191;2.北京市第二中學(xué),北京 100010)
從高速公路上人工放置三角警示牌的危險(xiǎn)性出發(fā),設(shè)計(jì)了一種可遠(yuǎn)程控制的搭載可自動(dòng)折疊三角警示牌的移動(dòng)機(jī)器人。機(jī)器人的機(jī)械結(jié)構(gòu)主要由底盤、輪式行走機(jī)構(gòu)、可折疊三角警示牌等組成,通過在三角警示牌的關(guān)節(jié)處放置驅(qū)動(dòng)舵機(jī),實(shí)現(xiàn)三角警示牌的自動(dòng)折疊與展開。其控制系統(tǒng)采用STM32F103RCT6芯片作為控制核心,通過L298N電機(jī)驅(qū)動(dòng)模塊控制電機(jī),通過舵機(jī)供電電源模塊給舵機(jī)供電;采用FS-GT3C遙控器,其頻率范圍:2.40~2.48GHz其配備的接收機(jī)與單片機(jī)通過串口進(jìn)行通信,從而實(shí)現(xiàn)對(duì)移動(dòng)機(jī)器人的遠(yuǎn)程控制。
折疊三角警示牌;移動(dòng)機(jī)器人;STM32;串口通信
0 引言
移動(dòng)機(jī)器人作為機(jī)器人技術(shù)的一個(gè)分支已經(jīng)被廣泛的應(yīng)用于救災(zāi)、軍事、探索等諸多領(lǐng)域,它集中了機(jī)械設(shè)計(jì)、計(jì)算機(jī)技術(shù)、通信工程、人工智能和自動(dòng)化控制等諸多學(xué)科不同領(lǐng)域的先進(jìn)研究成果,是目前科學(xué)技術(shù)發(fā)展的熱門領(lǐng)域之一。
隨著人們生活水平的提高,汽車已逐步走進(jìn)千家萬(wàn)戶。車輛行駛途中難免發(fā)生一些故障,如果在高速路上汽車發(fā)生故障了,就需要人拿著三角警示牌放在車后150米處。由于高速路上車速快、車況復(fù)雜,人去放置三角警示牌具有很大的危險(xiǎn)性,并且人在高速行走也違反交通法規(guī)。針對(duì)此問題,本文設(shè)計(jì)了搭載三角警示牌的移動(dòng)機(jī)器人。該移動(dòng)機(jī)器人有兩個(gè)特點(diǎn),第一個(gè)是可通過遙控器進(jìn)行遠(yuǎn)程控制,第二個(gè)是可以實(shí)現(xiàn)三角警示牌的自動(dòng)折疊、展開。
1 機(jī)器人機(jī)械機(jī)構(gòu)設(shè)計(jì)
1.1 機(jī)械結(jié)構(gòu)總體組成
該折疊三角警示牌移動(dòng)機(jī)器人機(jī)械部分主要由移動(dòng)底盤和折疊三角警示牌兩部分組成。圖1為該移動(dòng)機(jī)器人搭載的折疊三角牌展開圖,圖2為該機(jī)器人三角牌折疊圖。
1.2 底盤設(shè)計(jì)
對(duì)于移動(dòng)機(jī)器人底盤的制作,目前普遍采用一下兩種不同結(jié)構(gòu)形式的底盤。一種是通過多個(gè)部件以各種不同形式的聯(lián)結(jié)進(jìn)行拼接,另一種是整體性的底盤,即直接進(jìn)行整體加工。本文中的移動(dòng)機(jī)器人采用拼接性的底盤結(jié)構(gòu),通過螺栓將各部分固定,整個(gè)底盤由上底板、下底板、左側(cè)板、右側(cè)板、前側(cè)板、后側(cè)板六部分拼接而成,形成一個(gè)相對(duì)封閉的底盤,單片機(jī)等控制系統(tǒng)的模塊安放在下底板上,即位于封閉底盤中,可折疊警示牌位于上底板上。圖3為底盤的結(jié)構(gòu)圖。
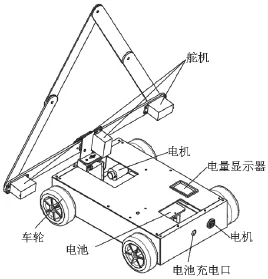
圖1 移動(dòng)機(jī)器人三角警示牌展開圖
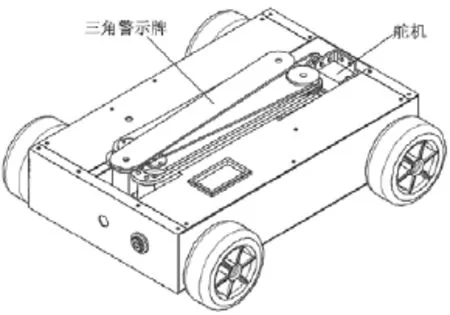
圖2 移動(dòng)機(jī)器人三角警示牌折疊圖
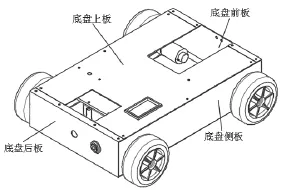
圖3 折疊三角警示牌移動(dòng)機(jī)器人底盤
1.2.1 底盤驅(qū)動(dòng)方式
本課題中的移動(dòng)機(jī)器人所搭載的三角警示牌重量輕,故采用兩只電機(jī)即可滿足要求,安裝在移動(dòng)機(jī)器人前部的兩側(cè);通過聯(lián)軸器與車輪相連,分別控制移動(dòng)機(jī)器人的兩側(cè)運(yùn)動(dòng);后部的兩輪從動(dòng),依靠?jī)蓚?cè)的速度差來實(shí)現(xiàn)移動(dòng)機(jī)器人的轉(zhuǎn)向以及原地旋轉(zhuǎn)。
1.2.2 驅(qū)動(dòng)電機(jī)
驅(qū)動(dòng)電機(jī)采用直流減速電機(jī),其詳細(xì)參數(shù)如表1所示。
1.2.3 折疊三角警示牌結(jié)構(gòu)設(shè)計(jì)
1)折疊三角警示牌結(jié)構(gòu)分析
折疊三角警示牌的各部分桿件采用硬質(zhì)塑料制作,外層涂上反光材料。折疊三角警示牌關(guān)節(jié)處采用舵機(jī)驅(qū)動(dòng),其整體結(jié)構(gòu)如圖4和圖5所示。
2)關(guān)節(jié)扭矩計(jì)算分析
由扭矩計(jì)算公式M=F.L,其中M表示扭矩,單位為N.m;F為作用力,單位為N。
下面對(duì)三個(gè)驅(qū)動(dòng)關(guān)節(jié)承受的最大扭矩進(jìn)行近似計(jì)算,首先對(duì)第一級(jí)關(guān)節(jié)需要承受的扭矩進(jìn)行近似計(jì)算,承受作用力為4.7N,物體轉(zhuǎn)動(dòng)時(shí)重心到轉(zhuǎn)動(dòng)中心的最大等效距離為130mm,故第一級(jí)關(guān)節(jié)承受的最大扭矩為。
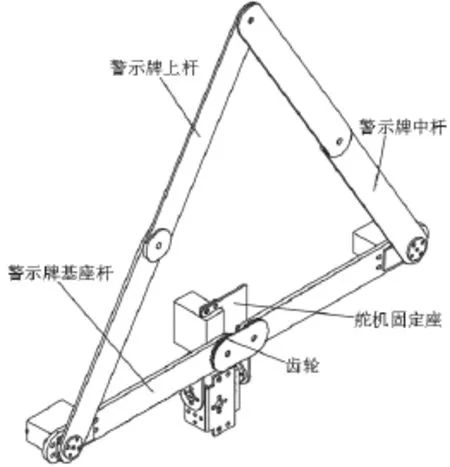
圖4 三角警示牌展開圖
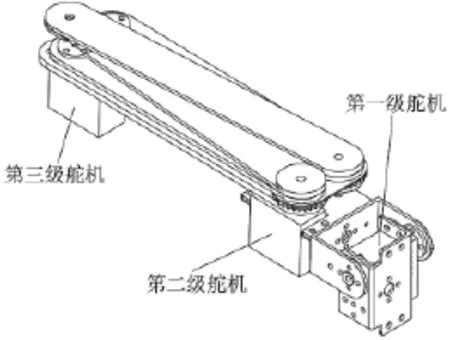
圖5 三角警示牌折疊圖
第二級(jí)關(guān)節(jié)需要驅(qū)動(dòng)警示牌展開,故上、中桿和基座桿的重量均在第二級(jí)關(guān)節(jié)處產(chǎn)生轉(zhuǎn)矩,其作用力等效為3.58N等效重心到關(guān)節(jié)中心的最大等效距離為95mm,故第二級(jí)關(guān)節(jié)承受的最大扭矩為。
第三級(jí)關(guān)節(jié)作用對(duì)稱分布,故只需要計(jì)算一側(cè)的關(guān)節(jié)承受扭矩即可。作用在上桿、中桿上的等效作用力為0.98N,展開時(shí)的轉(zhuǎn)動(dòng)過程中距離第三季關(guān)節(jié)的最大等效距離為145mm,故第三級(jí)關(guān)節(jié)承受的最大扭矩為。
通過計(jì)算和仿真,選擇MG996R舵機(jī)進(jìn)行關(guān)節(jié)的驅(qū)動(dòng),MG996R舵機(jī)的相關(guān)參數(shù)如表2所示。對(duì)三角警示牌進(jìn)行運(yùn)動(dòng)分析,得到三級(jí)舵機(jī)承受的力矩變化曲線如圖6所示。

表1 JGA25-371直流減速電機(jī)參數(shù)
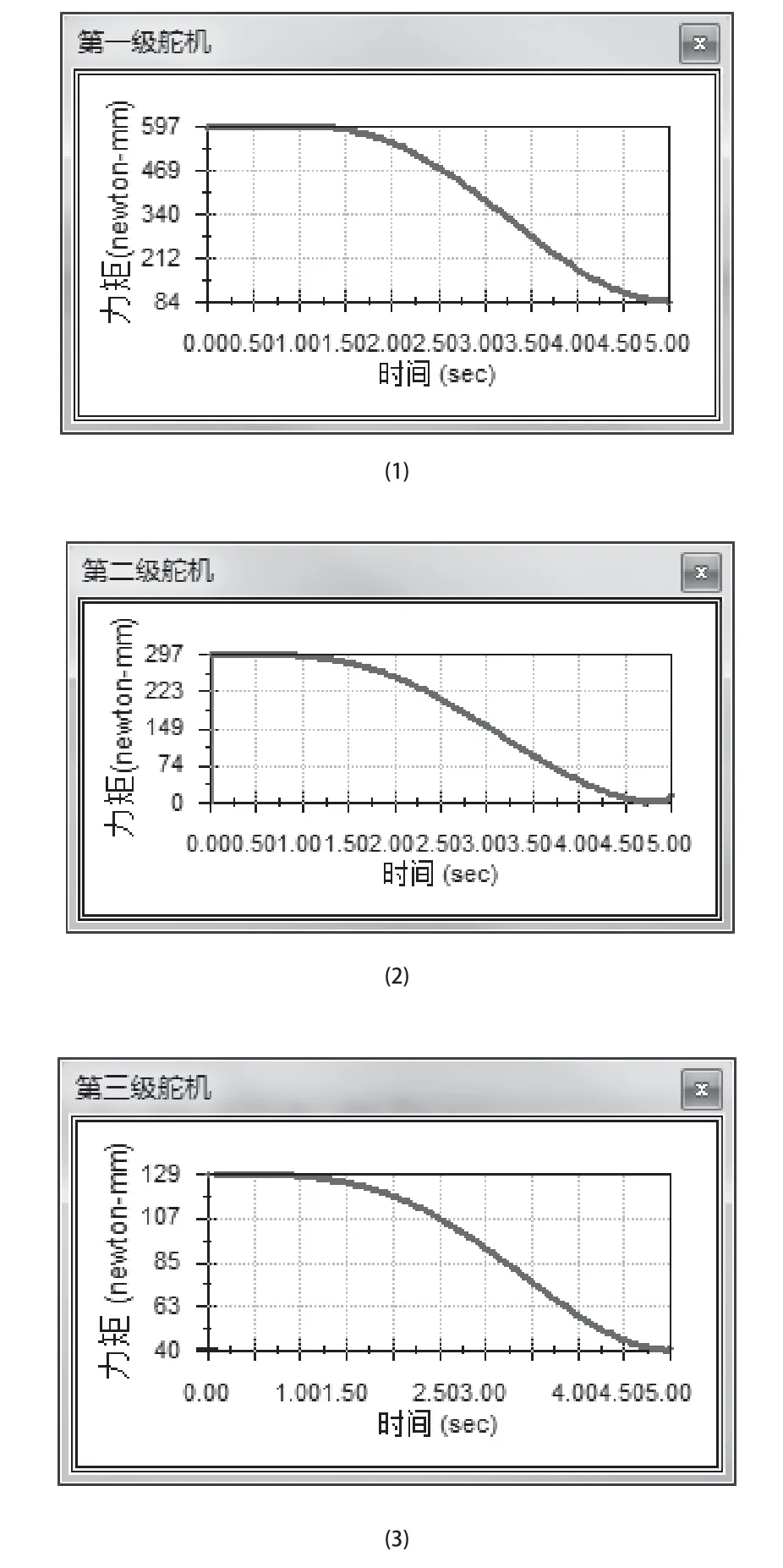
圖6 舵機(jī)關(guān)節(jié)力矩變化曲線
3 控制系統(tǒng)設(shè)計(jì)
3.1 控制電路設(shè)計(jì)
控制系統(tǒng)核心采用ARM V7-M架構(gòu)微控制器STM32F103RCT6,通過STM32103RCT6控制電機(jī)驅(qū)動(dòng)模塊從而控制電機(jī)。控制系統(tǒng)結(jié)構(gòu)圖如圖7所示。
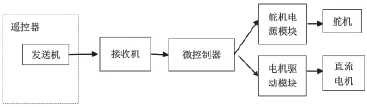
圖7 控制系統(tǒng)結(jié)構(gòu)圖
3.2 遙控器通信協(xié)議
FS-GT3C遙控器采用PPM信號(hào)與接收機(jī)進(jìn)行通信,用調(diào)制信號(hào)控制脈沖序列中各脈沖的相對(duì)位置(即相位),使各脈沖的相對(duì)位置隨調(diào)制信號(hào)變化,配置流程如圖8所示。
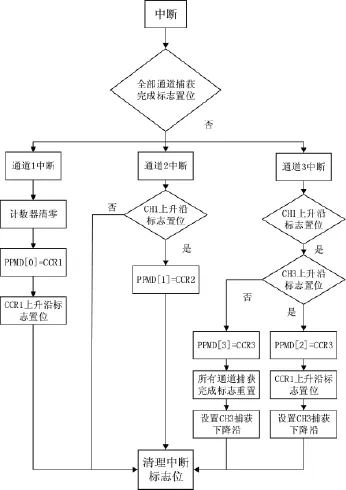
圖8 通信協(xié)議配置

表2 MG996R的相關(guān)參數(shù)
4 結(jié)論
本文設(shè)計(jì)的可折疊三角警示牌移動(dòng)機(jī)器人的創(chuàng)新點(diǎn)在于避免了人工放置三角警示牌的危險(xiǎn)性,有利于保障人員安全,并且三角警示牌設(shè)計(jì)成可折疊結(jié)構(gòu)有利于節(jié)省空間。該機(jī)器人的推廣使用具有十分重要的社會(huì)意義。
[1] 張毅,羅元,鄭太雄,等.移動(dòng)機(jī)器人技術(shù)及其應(yīng)用[M].北京:電子工業(yè)出版社,2007,09:32.
[2] 張國(guó)良,敬斌,劉延飛,熊磊.自主移動(dòng)機(jī)器人設(shè)計(jì)與制作[M].西安:西安交通大學(xué)出版社,2008:23-31.
The design and implementation of mobile robot with folding emergency refl ective triangles
CHEN Lin1, CHENG Shi-hao2, LI Da-zhai1
TP24
:B
1009-0134(2017)03-0145-03
2016-11-20
陳林(1994 -),男,湖南永州人,碩士研究生,研究方向?yàn)闄C(jī)器人控制技術(shù)。
猜你喜歡
北京航空航天大學(xué)學(xué)報(bào)(2022年6期)2022-07-02 01:59:12
四川輕化工大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年3期)2021-08-30 06:37:02
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
智能系統(tǒng)學(xué)報(bào)(2015年4期)2015-12-27 09:38:35
中國(guó)海洋大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31
