星載激光測高系統(tǒng)誤差分析
2017-05-02 01:41:52王昱,艾宇,呂源
測繪科學(xué)與工程 2017年6期
關(guān)鍵詞:影響
王 昱,艾 宇,呂 源
1.西安測繪研究所,陜西 西安,710054;
2.地理信息工程國家重點實驗室,陜西 西安,710054;
3.西安航天天繪數(shù)據(jù)技術(shù)有限公司,陜西 西安,710054
1 引 言
自從1974年“阿波羅”登月飛船上首次使用激光測高技術(shù)以來,包括美國、日本、中國等國家先后開展了星載激光測高技術(shù)的研究工作,國內(nèi)外已經(jīng)發(fā)射的典型激光測高衛(wèi)星及其基本技術(shù)參數(shù)見表1[1-3]。

表1 國內(nèi)外已經(jīng)發(fā)射的典型激光測高衛(wèi)星基本技術(shù)參數(shù)
美國于2003年發(fā)射的ICESAT衛(wèi)星搭載了GLAS傳感器,可測定沿軌道的陸地和水面的地形。由于GLAS獲取的各級激光測高數(shù)據(jù)可以公開下載,已成為國內(nèi)外學(xué)者從事星載激光測高技術(shù)研究的首選數(shù)據(jù)源。
ICESAT官方公布了其對GLAS傳感器的高程確定精度分析結(jié)果,但沒有給出完整的描述星載激光測高系統(tǒng)定位誤差的數(shù)學(xué)模型。范春波[4]、朱劍鋒[5]等提出了激光腳點定位模型,并給出了主要的誤差源,但沒有對腳點定位模型和誤差源之間的關(guān)系進行理論分析。黃朝圍[6]等利用簡化模型分析了不同地形條件下星載激光測高精度的變化。馬躍[7]利用簡化模型分析了姿態(tài)對星載激光測高系統(tǒng)的影響,并利用南極地區(qū)的Li-DAR數(shù)據(jù)進行了高程精度檢驗試驗。唐新明等[8]推導(dǎo)了激光測高衛(wèi)星嚴密幾何定位模型,并對光行差、硬件安裝誤差作了分析,但并未逐項分析激光測高的誤差影響。文獻[9-11]利用SRTM、機載LiDAR數(shù)據(jù)開展了針對GLAS數(shù)據(jù)的定位精度檢驗。
本文從星載激光雷達的精密幾何定位模型出發(fā),推導(dǎo)了各主要誤差項對于激光雷達腳點幾何定位的誤差傳播方程,利用仿真數(shù)據(jù)模擬了不同設(shè)計參數(shù)和誤差條件下的定位誤差。試驗結(jié)果表明,姿態(tài)測量誤差、指向角測量誤差和距離測量誤差對定位精度的影響較為劇烈。從獲取滿足無控定位精度要求的激光控制點的角度分析,在600km軌道高度,激光測高儀姿態(tài)測量和指向角測量精度應(yīng)至少優(yōu)于1.5″,測距精度應(yīng)優(yōu)于0.25m。
2 星載激光嚴密定位模型
本文涉及的主要坐標系定義如下:地心慣性坐標系OICRF-XICRFYICRFZICRF采用國際大地測量協(xié)會和天文學(xué)聯(lián)合會于1984年啟用的協(xié)議天球坐標系J2000;地固系OITRF-XITRFYITRFZITRF是以地球質(zhì)心為原點,Z軸指向地球的北極,X軸指向格林尼治子午線與地球赤道交點,Y軸則按照右手法則確定;衛(wèi)星本體坐標系OBody-XBodyYBodyZBody是以衛(wèi)星的質(zhì)心為原點,Y軸沿著衛(wèi)星橫軸,X軸沿著縱軸指向衛(wèi)星飛行方向,Z軸按照右手法則確定;激光測高儀坐標系原點在測高儀質(zhì)心,坐標軸與衛(wèi)星本體坐標系平行。
星載激光測距的空間幾何關(guān)系如圖1所示。其中,圖1(a)表示衛(wèi)星本體坐標系 OBody-XBodyYBodyZBody、激光光線以及激光地面足印點在地心慣性系OICRF-XICRFYICRFZICRF中的位置關(guān)系;圖1(b)則表示在激光測高儀坐標系中激光指向角θ、α的定義及其與激光腳點坐標的關(guān)系。在圖1(a)中,Olaser為激光發(fā)射的參考點;PGNSS為GNSS天線相位中心;OBody為衛(wèi)星質(zhì)心;Pground為激光地面足印點。星載GNSS測定的是GNSS相位中心的位置;姿態(tài)敏感器測定的是星敏在J2000坐標系下的指向。為了得到激光脈沖發(fā)射時的位置和姿態(tài),需要將GNSS和星敏測定的數(shù)據(jù)轉(zhuǎn)化為激光測高儀的位置和指向,因此,需通過地面測定GNSS相位中心在衛(wèi)星本體坐標系中3個偏移[Dx Dy Dz]T以及星敏感器本體系和衛(wèi)星本體系之間的坐標旋轉(zhuǎn)關(guān)系。同時,激光測高儀相對衛(wèi)星本體之間也需測定位置偏移[dx dy dz]T及脈沖發(fā)射指向與衛(wèi)星本體坐標軸的角度旋轉(zhuǎn)之間的關(guān)系。

圖1 星載激光測高原理
如圖1(b)所示,假設(shè)激光指向與測高儀坐標系Z軸的夾角為θ,在XLaserOLaserYLaser平面上的投影OLaserC與 X軸正向夾角為α,ρ為激光的測距值,則激光腳點在衛(wèi)星本體坐標系下的坐標為:
因此,在不考慮大氣折射影響的條件下,在地固系中的星載激光測高嚴密幾何定位模型為:


3 激光足印點定位誤差源分析
對(2)式進行分析可以看出,激光足印點的定位精度主要受以下幾項誤差因素的影響:
一是衛(wèi)星的質(zhì)心定位誤差,由星載GNSS接收機本身的定位誤差以及內(nèi)插計算引起。該項誤差與其引起的定位精度變化是線性關(guān)系,影響有限。
三是激光測高儀的安置誤差,包括GNSS偏心誤差、激光參考點偏心誤差、激光指向角誤差三部分內(nèi)容。其中兩項偏心誤差在實驗室環(huán)境下的測定精度較高,盡管衛(wèi)星在軌后會產(chǎn)生一定的變化,但其影響仍然相對較小。相比較而言,激光指向與衛(wèi)星本體系的角度測量誤差由于受測距值放大效應(yīng)的影響會帶來較大的誤差,因此,是分析的重點。
四是激光測高儀的測距誤差,主要為激光測高儀硬件測距誤差和激光穿越大氣層引起的傳輸誤差,其中硬件測距誤差可以通過標定和測量消除,傳輸誤差可以通過后期處理修正。
因此,本文對于激光腳點誤差的分析主要圍繞位置定位誤差 mXs、mYs、mZs,姿態(tài)測量誤差 mφ、mω、mκ,指向角測量誤差 mθ、mα和測距誤差 mρ9個變量展開。假設(shè)上述9個變量取值相互獨立,則對(2)式進行泰勒展開,取一次項得到(3)式。(3)式可以作為激光測距儀定位的誤差傳播方程,用于分析各誤差項以及衛(wèi)星設(shè)計值對于激光測高精度的影響。由于定位誤差的影響有限,因此,下面重點分析姿態(tài)測量誤差、指向角測量誤差以及測距誤差對激光腳點定位精度的影響。

3.1 姿態(tài)測量誤差
姿態(tài)測量誤差主要是衛(wèi)星在軌運行時星敏、陀螺等儀器測量衛(wèi)星姿態(tài)時產(chǎn)生的誤差,可以分為俯仰φ、側(cè)滾ω以及偏航κ三個正交方向的角誤差分量。

對(2)式求偏導(dǎo),可得

3.2 指向角測量誤差
正如前文所述,在安置誤差中,由于GNSS和激光測高儀的偏心誤差影響較小,而指向角誤差受測距值影響對腳點定位精度產(chǎn)生的影響較大,因此,本節(jié)重點分析指向角誤差。
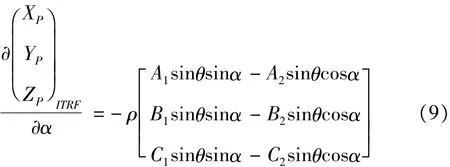
分析(2)式可以看出,旋轉(zhuǎn)矩陣A中的變量只和姿態(tài)角以及坐標系轉(zhuǎn)換參數(shù)有關(guān),和θ以及α角度即指向角無關(guān)。對(2)式求偏導(dǎo)可得,激光指向與激光測高儀本體坐標系Z軸夾角θ引起的誤差可表示為:

激光在XOY平面上的投影與X軸正向夾角α引起的誤差可表示為:
3.3 距離測量誤差
星載激光測高儀的測距系統(tǒng)誤差雖然在地面進行了嚴格的實驗測定,但是入軌后其性能可能會受到影響。總的來講,距離測量誤差主要包括時間同步誤差、地形起伏引起的定位誤差及大氣傳輸誤差等,距離測量誤差對激光腳點定位誤差的影響可表示為:

4 試驗分析
為了系統(tǒng)分析衛(wèi)星設(shè)計參數(shù)和定標誤差對腳點定位精度的影響,參考ICESat及國內(nèi)外同類衛(wèi)星的設(shè)計使用情況,簡化了公式(3)的分析條件,假設(shè)衛(wèi)星質(zhì)心及天線相位中心偏移量均為0,且在衛(wèi)星飛行過程中,衛(wèi)星姿態(tài)較為穩(wěn)定,均為接近于0的微小角度,故將姿態(tài)角均設(shè)為0°。在同等測量誤差情況下,飛行高度對定位精度的影響,近似認為,在此條件下,整理(3)~(10)式,得到三軸的誤差傳播方程如(11)式所示

針對(11)式,重點分析衛(wèi)星設(shè)計指標包括飛行高度H和指向角θ,以及測量誤差包括平臺定位誤差、姿態(tài)測量誤差、指向角測量誤差以及測距誤差對腳點定位精度的影響。
從衛(wèi)星應(yīng)用的角度分析,受星上能源條件限制,目前激光測高衛(wèi)星獲取的控制點密度還無法滿足地形測量中DEM獲取的密度要求,激光測高衛(wèi)星獲取的控制點或測距數(shù)據(jù)的用途主要是滿足大比例尺測圖中的精度提升需要,通過深入分析文獻[12]提出的1:1萬無控測圖過程中的激光控制數(shù)據(jù)應(yīng)用需求,在本文的仿真試驗中,將激光控制點的精度要求設(shè)定為平面10m、高程1m。另外參考ICESat設(shè)計指標,除特別說明外,衛(wèi)星飛行高度均為600km,指向角θ為0.3°,指向角α為90°,相關(guān)測量誤差的取值考慮了國內(nèi)外測距儀制造標定的平均水平,具體見表2。

表2 測量誤差的取值
4.1 衛(wèi)星設(shè)計指標對腳點定位精度的影響
在各項測量誤差不變的情況下,試驗中分別改變軌道高度和指向角的設(shè)計參數(shù),考察腳點定位誤差變化對X、Y、Z三軸方向的誤差 MX、MY、MZ以及總的定位誤差MXYZ的影響情況。具體試驗結(jié)果見表3和表4,其變化分析如圖2和圖3所示。

表3 飛行高度對定位精度的影響(m)

表4 指向角θ對定位精度的影響(m)

圖2 飛行高度的影響
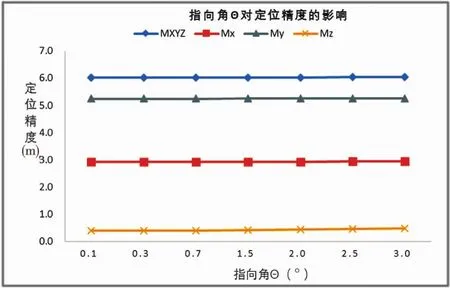
圖3 指向角θ的影響
從表3和圖2可以看出,在相同誤差條件下,降低飛行高度,定位誤差隨之線性減小,這說明適當降低飛行高度有助于降低各項誤差的影響。三軸方向的誤差相互比較,平面X、Y方向變化較為劇烈,而Z方向則較為平緩,衛(wèi)星高度從800km降至200km,Z方向誤差僅減小了不到2cm。
分析表4和圖3可以看出,相比飛行高度,指向角θ對定位誤差的影響則相對較小,θ由0.1°提高到3°,總的定位誤差值提高了約4cm。分析原因主要是指向角θ通過三角函數(shù)對定位誤差產(chǎn)生影響,影響幅度有限。
指向角α對定位精度的影響見表5。仿真分析表明,該項設(shè)計值雖然對X、Y、Z方向的定位精度產(chǎn)生影響,但總的定位誤差則沒有發(fā)生明顯變化。

表5 指向角α對定位精度的影響(m)
4.2 測量誤差對于腳點定位精度的影響
各項測量誤差中,平臺位置測量誤差的影響最簡單,從(11)式可以看出,其對腳點定位精度的影響不僅是線性的,而且處在一個數(shù)量級上,圖4的仿真結(jié)果也印證了上述結(jié)論。下面重點分析一下姿態(tài)測量誤差、測距誤差以及指向角測量誤差的影響。
(1)姿態(tài)測量誤差的影響
在其他條件不變的情況下,將姿態(tài)測量誤差的取值由3″降到0.2″,腳點定位誤差的變化情況見表6和圖5。可以看出,隨著姿態(tài)測量誤差的減小,腳點定位精度迅速提升,特別是在X、Y方向變化非常顯著,這種現(xiàn)象出現(xiàn)的原因主要是姿態(tài)測量精度影響了激光發(fā)射方向的確定精度,從而對腳點的平面定位精度產(chǎn)生了影響。從目前激光腳點10m的平面定位精度要求,并考慮一定富裕量,姿態(tài)測定精度應(yīng)優(yōu)于1.5″。

表6 姿態(tài)測量誤差的影響(m)

圖4 平臺定位誤差的影響
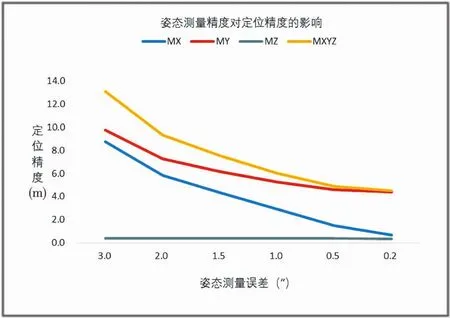
圖5 姿態(tài)測量誤差的影響
(2)測距誤差的影響
在其他條件不變的情況下,將測距誤差由1m縮小到0.05m,定位誤差的變化見表7和圖6。可以看出,測距誤差主要對Z方向的定位誤差構(gòu)成影響,且非常顯著。應(yīng)該指出在本次試驗中,測距誤差對于Y方向定位精度也有影響,因為發(fā)生在小數(shù)點6位以后,因此,在表6中沒有顯示出來,隨著姿態(tài)確定誤差的減小Y方向定位精度也不斷提升。從目前對于激光控制點1m的高程定位精度要求并考慮激光測高儀的技術(shù)發(fā)展水平,測距誤差應(yīng)小于0.25m。

圖6 測距誤差的影響

圖7 指向角測量誤差的影響
(3)指向角測量誤差的影響
改變指向角θ的取值,由5″變化至0.5″,腳點誤差的變化見表8和圖7。可以看出,指向角對定位誤差的影響類似于姿態(tài)測量誤差的影響,主要影響平面定位精度,對Z方向的精度也有影響,但影響有限。至于影響X方向還是Y方向或者均影響,取決于α的取值。從滿足目前激光控制點10m平面定位精度的要求并考慮指向角地面標定技術(shù)的發(fā)展,指向角測量精度應(yīng)優(yōu)于1.5″。
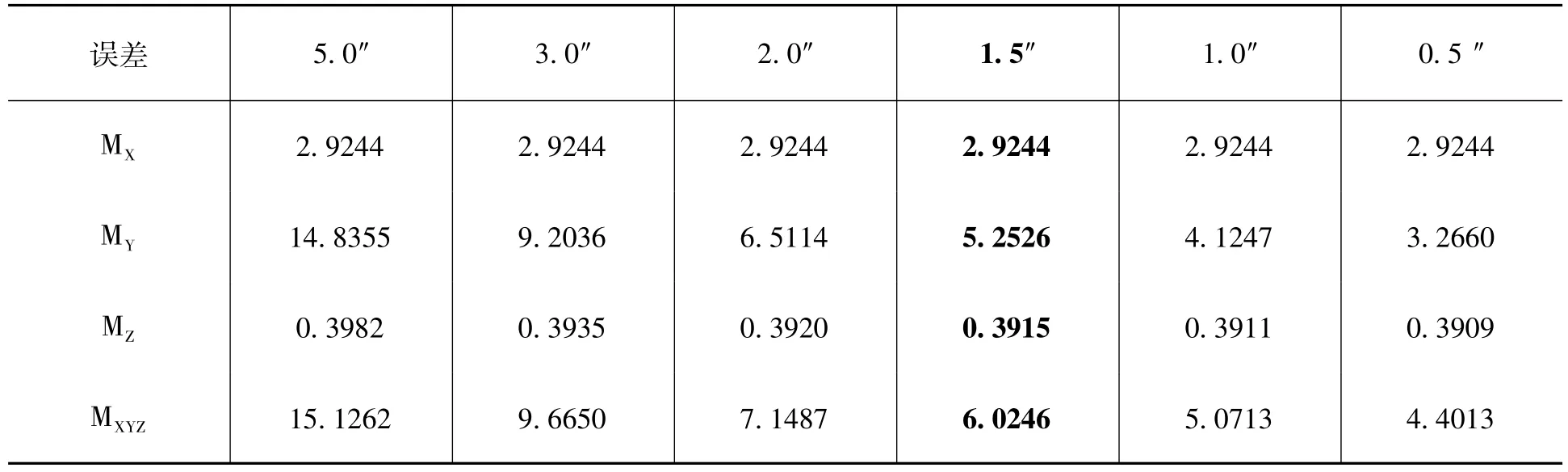
表8 指向角誤差的影響(m)
應(yīng)該指出姿態(tài)測量誤差小于1.5″,測距誤差小于0.25m,指向角測量誤差小于1.5″的結(jié)論都不是單項誤差獨立影響的結(jié)果,而是在如表2所示的缺省誤差條件(此時姿態(tài)測量精度1.0″)下得出的。事實上綜合表6~8可以看出,當使用缺省誤差條件時(字體加粗),三軸總的測量精度優(yōu)于6.03m,平面定位精度優(yōu)于6.02m,高程定位精度優(yōu)于0.40m。在表6中還仿真了姿態(tài)測量精度1.5″,其他誤差處于缺省條件的總的誤差(表6中第四列字體加粗),其中三軸測量精度優(yōu)于7.58m,平面定位精度優(yōu)于7.57m,高程定位精度優(yōu)于0.40m。
4.3 不同方向精度影響差異性的討論
總結(jié)4.1、4.2節(jié)的試驗不難看出,同樣的誤差,對于X、Y、Z三個方向精度影響有較大差異,除測距誤差外,姿態(tài)測量誤差、指向角測量誤差對于X、Y方向定位精度影響較大,對于Z方向精度影響不大。為了分析造成這種影響的原因,選定一組典型參數(shù) H=600km,θ =0.3°,α=90°,代入公式(11)得到:

從(12)式可以看出飛行高度與測距值成正比,而飛行高度對于姿態(tài)和指向角測量誤差的放大作用主要體現(xiàn)在X、Y方向(例如對于mω,影響因子是600000),對于 Z方向的影響相對較小(mω的影響因子3141.62),這就是Z方向精度變化小于X、Y方向的原因。同樣測距誤差的影響因子X、Y方向要遠小于Z方向,這也解釋了測距誤差對于Z方向影響大于X、Y方向的原因。
同時仔細觀察一下公式(11)會發(fā)現(xiàn),除平臺定位誤差外,姿態(tài)誤差、指向角誤差以及測距誤差在X和Y方向均關(guān)于角α成正余弦對稱關(guān)系,如果在X方向誤差因子中有sinα,則在Y方向誤差因子中必然有cosα。其實回顧一下圖1(b)中α的定義就會發(fā)現(xiàn),這種規(guī)律的產(chǎn)生有其必然性,因為α本來就是用來定義激光光線在X、Y軸上的投影的。由于α取值一般是0°或90°,因此,各誤差項對于X、Y的影響也成對稱關(guān)系。例如當α=90°時,對X方向定位精度產(chǎn)生影響的誤差項是mφ、mκ、mα,對 Y方向定位精度產(chǎn)生影響的誤差項是 mω、mρ、mθ,這種對稱現(xiàn)象在表5中得到了充分體現(xiàn)。隨著α的變化X方向和Y方向的精度變化呈現(xiàn)此消彼長的特點,同時總的誤差則幾乎不變,這也解釋了為什么在表7中指向角θ的誤差只對Y方向精度產(chǎn)生影響。
5 結(jié) 論
本文從星載激光測高儀的嚴密定位模型出發(fā),推導(dǎo)了各主要誤差源的誤差傳播方程,利用仿真試驗分析了各種誤差源對于定位精度的影響。從試驗結(jié)果看,姿態(tài)測量誤差、指向角測量誤差和測距誤差對定位精度的影響較大。其中,姿態(tài)測量誤差和指向角測量誤差主要影響激光腳點的平面定位精度;測距誤差則對高程定位精度的影響較為明顯。
從滿足衛(wèi)星設(shè)計研制的角度分析,在激光測高儀技術(shù)狀態(tài)確定的情況下,適當降低飛行高度有利于提高定位精度。在600km軌道高度激光測高儀如果需要滿足平面10m、高程1m的定位精度,激光測高儀的姿態(tài)測量精度和指向角測量精度應(yīng)至少優(yōu)于1.5″,測距精度應(yīng)優(yōu)于0.25m。本次研究中,還未考慮地形坡度對于定位精度的影響,后續(xù)將開展深入研究。
[1]文漢江,程鵬飛.ICESAT/GLAS激光測高原理及其應(yīng)用[J].測繪科學(xué),2005,30(5):33-35.
[2]王建宇,舒嶸,陳衛(wèi)標等.嫦娥一號衛(wèi)星載激光高度計[J].中國科學(xué),2010,40(8):1063-1070.
[3]韓玲,田世強,謝俊峰.星載激光測高儀檢校技術(shù)發(fā)展現(xiàn)狀淺析[J].航天返回與遙感,2016,37(6):11-19.
[4]范春波等.ICESAT/GLAS激光腳點定位及誤差分析[J].大地測量與地球動力學(xué),2007,27(1):104-106.
[5]朱劍鋒,王昱,胡煜等.星載激光測高的系統(tǒng)誤差分析與檢校[J].測繪通報,2014(S1):137-140.
[6]黃朝圍,李國元,李姍姍等.不同地形條件下的星載激光測高系統(tǒng)誤差分析[J].測繪科學(xué),2016,41(1):44-49.
[7]馬躍,陽凡林,盧秀山等.對地觀測星載激光測高系統(tǒng)高程誤差分析[J].紅外與激光工程,2015,44(3):1042-1047.
[8]唐新明,李國元,高小明等.衛(wèi)星激光測高嚴密幾何模型構(gòu)建及精度初步驗證[J].測繪學(xué)報,2016,45(10):1182-1191.
[9]艾建華.利用 ICESAT/GLAS激光測高數(shù)據(jù)評估SRTM數(shù)據(jù)精度[J].測繪技術(shù)裝備,2015,17(2):63-66.
[10]Hieu Duong.Icesat Full-waveform Altimetry Compared to Airborne Laser Scanning Altimetry Over The Netherlands[J].IEEE Transactions on Geoscience and Remote Sensing,2009,47(10):3365-3378.
[11]Lori A,etc.ICESATAltimetry Data Product Verification atWhite Sands Space Harbor[J].IEEE Transactionson Geoscience and Remote Sensing,2007,45(1): 149-155.
[12]王任享.中國無地面控制點攝影測量衛(wèi)星追述(二)1:1萬傳輸型攝影測量衛(wèi)星技術(shù)思考[J].航天返回與遙感,2014,35(2):1-5.
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(shù)(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
知識經(jīng)濟·中國直銷(2016年3期)2016-02-27 16:15:49
現(xiàn)代檢驗醫(yī)學(xué)雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學(xué)低年級版)(2011年3期)2011-01-01 00:00:00