非線性因素耦合下電動作動器的動力學建模與仿真研究
2017-05-12 02:02:32張新華張兆凱
導航定位與授時 2017年3期
關鍵詞:模型
張新華,劉 源,黃 建,張兆凱
(北京自動化控制設備研究所,北京 100074)
非線性因素耦合下電動作動器的動力學建模與仿真研究
張新華,劉 源,黃 建,張兆凱
(北京自動化控制設備研究所,北京 100074)
針對飛行器半實物仿真領域對電動作動器高精度建模的需求,對電動作動器的各分系統(tǒng)分別進行動力學方程描述,建立了含間隙、剛度和摩擦等非線性因素的完整電動作動器模型。通過對比模型仿真與實測結果,表明所建分系統(tǒng)的動力學方程是合理正確的。建立的模型對于指導作動器的設計和優(yōu)化均具有較大的參考價值。
非線性因素;電動作動器;動力學方程;傳動機構;仿真
0 引言
飛行器電動作動系統(tǒng)是一種高精度、高動態(tài)響應的位置跟蹤伺服系統(tǒng),其性能直接決定著飛行器控制的動態(tài)品質。目前,國內(nèi)對伺服作動器的建模研究多是將系統(tǒng)看作成一個二階或三階系統(tǒng),然后通過直接建立或參數(shù)辨識出該二階或三階參數(shù)化模型來研究作動器的動態(tài)性能,該研究方式忽略了作動器中的諸多非線性因素,如間隙、剛度和摩擦等[1-4]。隨著飛行器朝著高機動性、高速度、跨時域等方向的發(fā)展,其對電動作動器也提出高動態(tài)響應、大功率輸出、小型輕質化、高剛度、耐高溫、連續(xù)長時間工作等嚴格要求。摩擦、間隙和彈性形變是影響舵系統(tǒng)靜、動態(tài)性能的重要非線性因素,其非線性特性會導致系統(tǒng)帶寬變低、跟蹤誤差增大、低頻相位滯后、低速“爬行”、極限環(huán)振蕩、自激振動等現(xiàn)象,嚴重制約了作動系統(tǒng)控制性能的提高。
本文通過對電動作動器的各分系統(tǒng)分別進行動力學方程描述,綜合考慮機構非線性因素,建立電動作動器精確數(shù)學模型,并對其進行仿真和試驗驗證研究。結果表明,所建模型具有較高的精度。
1 分系統(tǒng)模型的數(shù)學描述
1.1 電機的動力學模型
無刷直流電機在轉動過程中,定子電樞繞組合成的磁場并不是連續(xù)旋轉的,而是以60°電角度為間隔進行跳躍變化的。控制電路對轉子位置傳感器檢測的信號進行邏輯變換后產(chǎn)生脈寬調制PWM信號,控制逆變器各功率開關管,從而使電機各相繞組按一定順序工作,在電機氣隙中產(chǎn)生跳躍式旋轉磁場。忽略換相特性、轉矩波動等非線性因素時,可以將三相繞組簡化為完全對稱,由其工作原理可以得到電機的簡化動力學線性方程:
(1)
式中參數(shù)均為簡化后的等效值,其中θm為電機轉動的機械角度(rad),Ω為電機轉動的機械角速率(rad/s),Tl為負載轉矩(N·m),JGes為轉動慣量(kg·m2),Ke為感應電勢系數(shù)((V·s)/rad),Kt為轉矩系數(shù)((N·m)/A),R為相電樞內(nèi)阻(Ω),L為相電樞電感(H)。
1.2 齒輪系的動力學模型
作動器的傳動機構中,齒輪是用于電機輸出軸減速傳動和電位器與舵軸之間傳動,將其簡化成一單自由度系統(tǒng)模型,使用集中質量法建立齒輪傳動的動力學模型,如圖1所示。
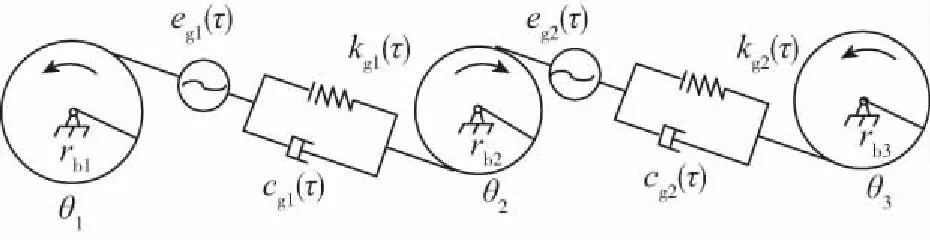
圖1 齒輪系動力學模型Fig.1 The dynamic model of gear train
其中:θ1、θ2、θ3為3個齒輪的角位移,單位rad;rb1、rb2、rb3為3個齒輪的基圓半徑,單位mm;kg1(τ)、kg2(τ)分別為2對齒輪之間的嚙合剛度,單位N/mm/μm;cg1(τ)、cg2(τ)分別為2對齒輪之間的阻尼系數(shù),單位N/(mm/s);eg1(τ)、eg2(τ)分別為2對齒輪嚙合的綜合誤差,單位mm。
設電機給齒輪1的力矩為TM,Tij表示齒輪i給齒輪j的力矩,TS為從滾珠絲杠傳來的負載扭矩,J1、J2、J3分別為各齒輪的轉動慣量,J4為與齒輪3通過螺紋連接的滾珠絲杠的轉動慣量,則依據(jù)牛頓力學定律,可得該齒輪系的運動微分方程為:
(2)
其中
T12=kg1(τ)tf1(rb1θ1-rb2θ2-eg1(τ))rb1+
T21=kg1(τ)tf1(rb1θ1-rb2θ2-eg1(τ))rb2+
T32=kg2(τ)tf2(rb2θ2-rb3θ3-eg2(τ))rb3+
T23=kg2(τ)tf2(rb2θ2-rb3θ3-eg2(τ))rb2+
式中,f(x)是具有齒側間隙時輪齒嚙合力的非線性函數(shù),齒側間隙是指在嚙合線上度量的側隙(見圖2)。設齒輪副的上側隙分別為gn1、gn2,齒輪副的下側隙分別為gp1、gp2,則f(x)的表達式為
(3)
(4)
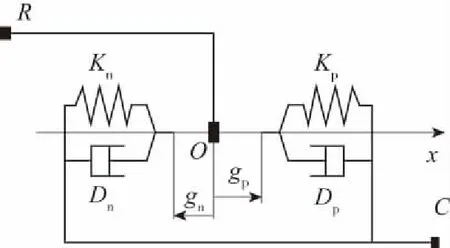
圖2 齒側間隙模型Fig.2 The model of hard stop in gear
1.3 滾珠絲杠副的動力學模型
把滾珠絲杠副分成滾珠絲杠與絲杠螺母兩部分,使用單自由度的軸向剛度和阻尼來模擬兩部分的接觸情況,如圖3所示。對齒輪3與滾珠絲杠、絲杠螺母分別使用達朗貝爾定理有
(5)
(6)
式中,x4表示絲杠螺母直線移動的位移量,m1為絲杠螺母的質量,F21x表示轉接桿傳遞給螺母的力,KS和CS分別表示滾珠絲杠副的接觸剛度和接觸阻尼,f(x)為間隙函數(shù),Ff為軸向摩擦力。
其中,摩擦力采用Stribeck模型,其數(shù)學表達形式為F=(FC+(Fbrk-FC)·exp(-cv|v|))sign(υ)+fv
其中,F(xiàn)C為庫倫摩擦力,Fbrk為最大靜摩擦力,f為黏性摩擦系數(shù),ν為兩端相對速度,cv是根據(jù)摩擦條件確定的因子,一般在0.5~2之間變化。
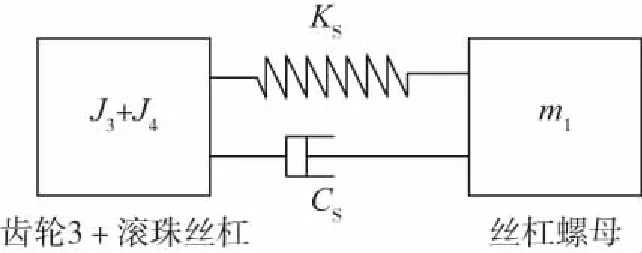
圖3 滾珠絲杠副動力學模型Fig.3 The dynamic model of ball screw
1.4 連桿機構模型
作動器中的連桿機構屬于曲柄滑塊機構,對其進行建模時,忽略曲柄與轉接桿、轉接桿與絲杠螺母之間鉸接的間隙與摩擦,假設曲柄與轉接桿均為二力桿,則該曲柄滑塊機構的動力學模型如圖4所示。
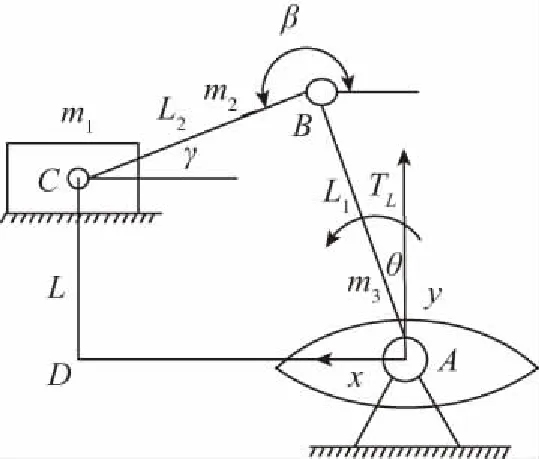
圖4 連桿機構模型Fig.4 The model of link mechanism
設A、B、C三點的坐標分別為A(0,0)、B(x2,y2)、C(x4,L),設曲柄與轉接桿的重心坐標分別為(x1,x2)、(x3,y3),則機構的位移矢量環(huán)路方程為
對上式求導可得
繼續(xù)求導,可得曲柄滑塊機構的運動方程為
又由幾何關系可得
兩次求導后,寫成矩陣的形式有
(7)
分別對曲柄,轉接桿和滾珠螺母進行受力分析如圖5所示,可得連桿機構的動力學方程。
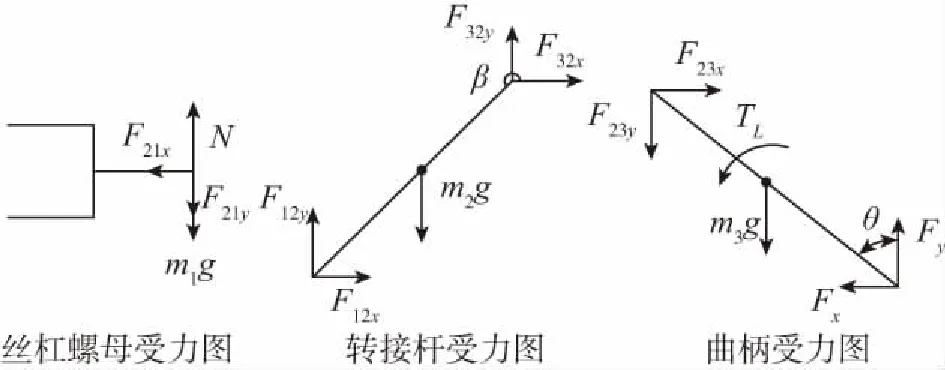
圖5 受力分析圖Fig.5 The diagram of stress analysis
對曲柄有
(8)
對轉接桿有
(9)
對絲杠螺母有
(10)
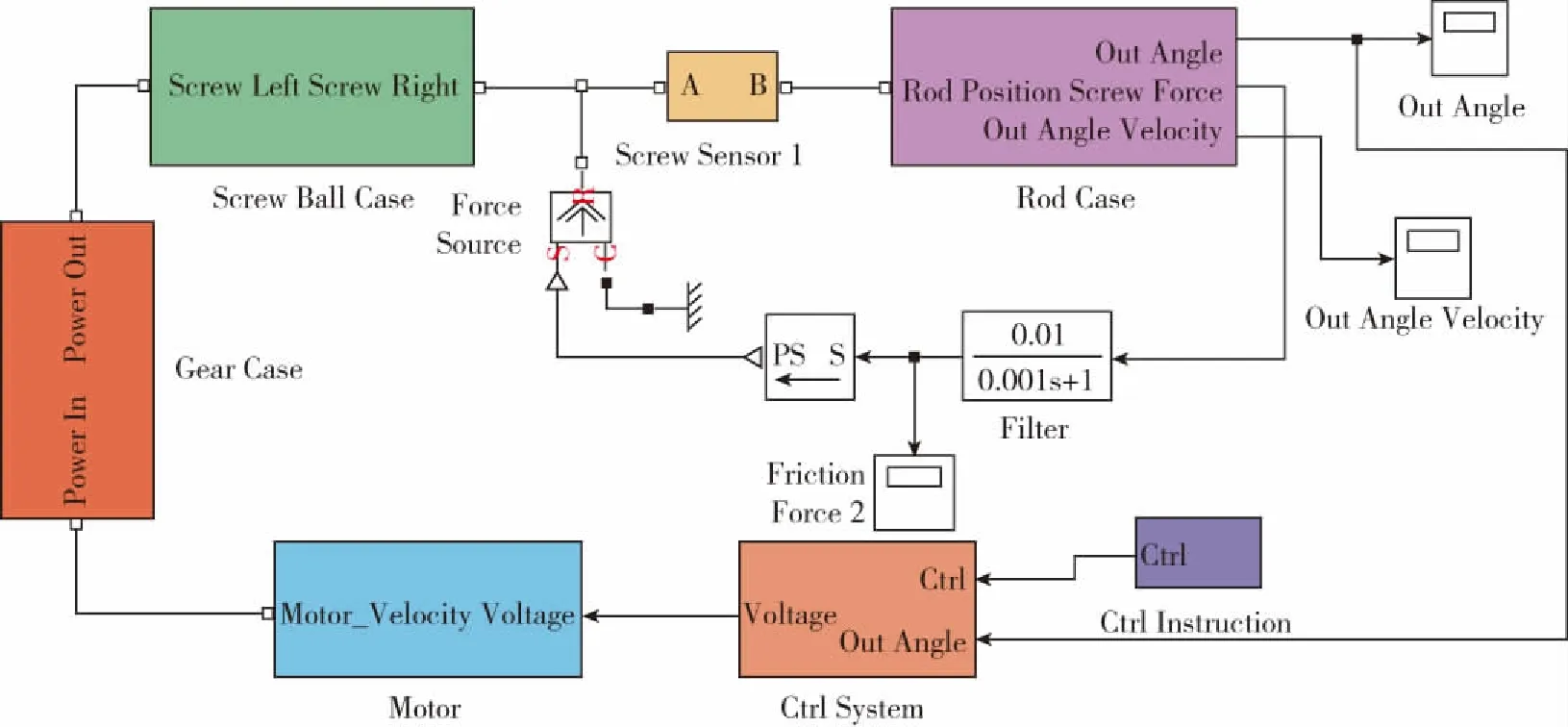
圖6 伺服系統(tǒng)的完整模型Fig.6 The complete model of servo system
根據(jù)實際情況,舵機輸出角度θ可由反饋電位器實時測量得到,若θ已知,則β、γ均為已知量,
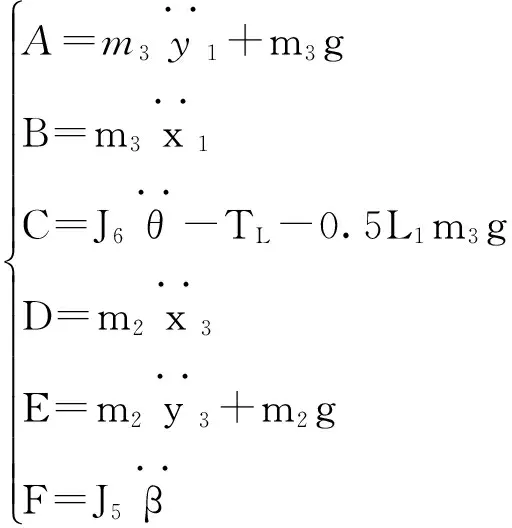

(11)

(12)

(13)
(14)

(15)

(16)
2 伺服系統(tǒng)建模
按照前述的伺服作動器的動力學模型,在Simulink中對控制器、電機、齒輪、滾珠絲桿副、連桿機構等分別進行建模,整個伺服系統(tǒng)的模型如圖6所示。
該模型包含控制系統(tǒng)和作動器系統(tǒng),前者采用Matlab通用工具箱完成建模,后者采用其自帶的Simscap工具箱完成建模,其中建模以能量傳輸守恒為基礎,不僅考慮了控制系統(tǒng)與作動器的實體結構,同樣考慮了摩擦、間隙和剛度等非線性因素,較為真實地反映了伺服系統(tǒng)的工作性能。模型的主要物理參數(shù)均可通過UG三維模型計算,其他的如摩擦、間隙和剛度等參數(shù)可通過試驗或計算的方法獲得。
3 模型仿真與驗證
選擇一種前級齒輪系,后級采用滾珠絲杠副加連桿形式的電動作動器作為測試對象,對額定負載下伺服系統(tǒng)典型位置下的穩(wěn)態(tài)誤差和動態(tài)過程進行仿真和驗證。作動器的部分參數(shù)如表1所示。
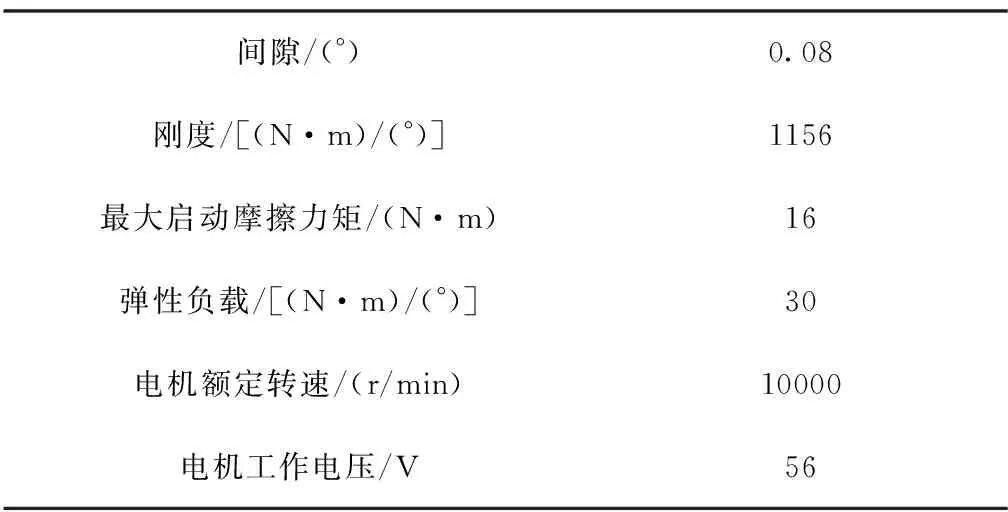
表1 作動器部分參數(shù)列表Tab.1 The part parameters list of a actuator
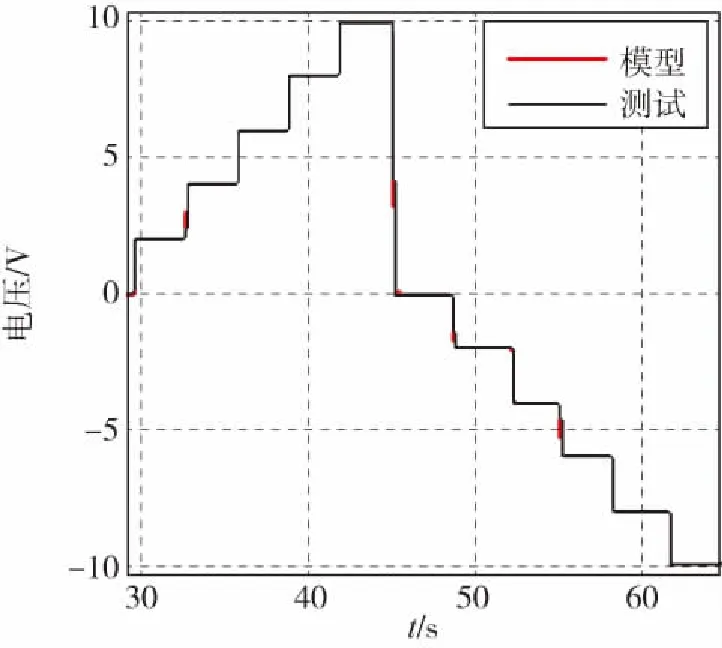
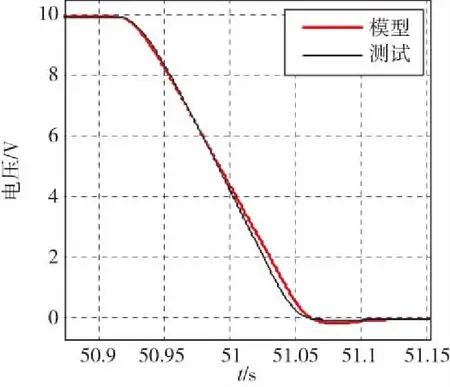
作動器傳遞系數(shù)和頻帶的仿真與實測結果對比如圖7所示。其中,傳遞系數(shù)的仿真與實測結果值見表2,可以看出,傳遞系數(shù)的仿真結果均在技術要求的范圍內(nèi),且最大誤差不超過1%。從掃頻曲線可以看出,模型與實測結果在0~10Hz的吻合程度較好,經(jīng)計算,該作動系統(tǒng)模型在頻帶內(nèi)的擬合度為83.7%。此外,在10Hz附近掃頻仿真曲線衰減較快,這是因為在前期系統(tǒng)建模中,將無刷直流電機模型簡化成了直流電機,忽略了其轉矩波動的影響。
(a) 傳遞系數(shù)測試(a) The test of transter coefficient
(b) 大誤差信號測試(b) The test of large error signal
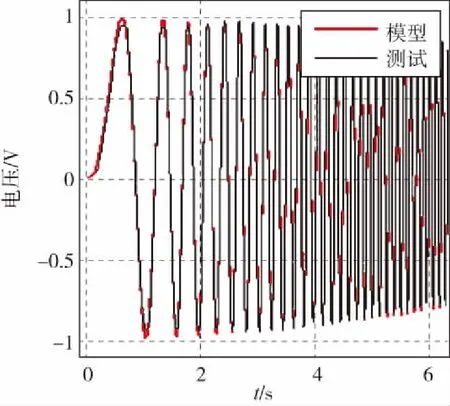
(c) 0~10Hz掃頻測試(c) The sweep test from 0Hz to 10Hz
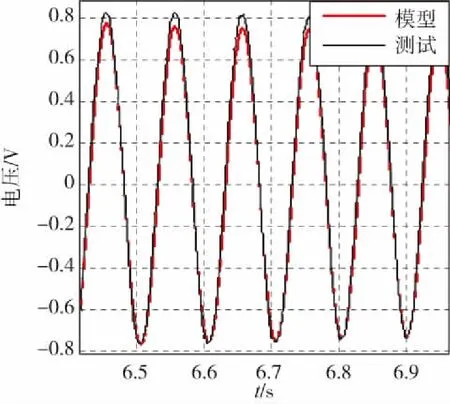
(d) 10Hz附近掃頻測試(d) The sweep test near 10Hz圖7 伺服系統(tǒng)動態(tài)性能測試Fig.7 The dynamic performance test of servo system
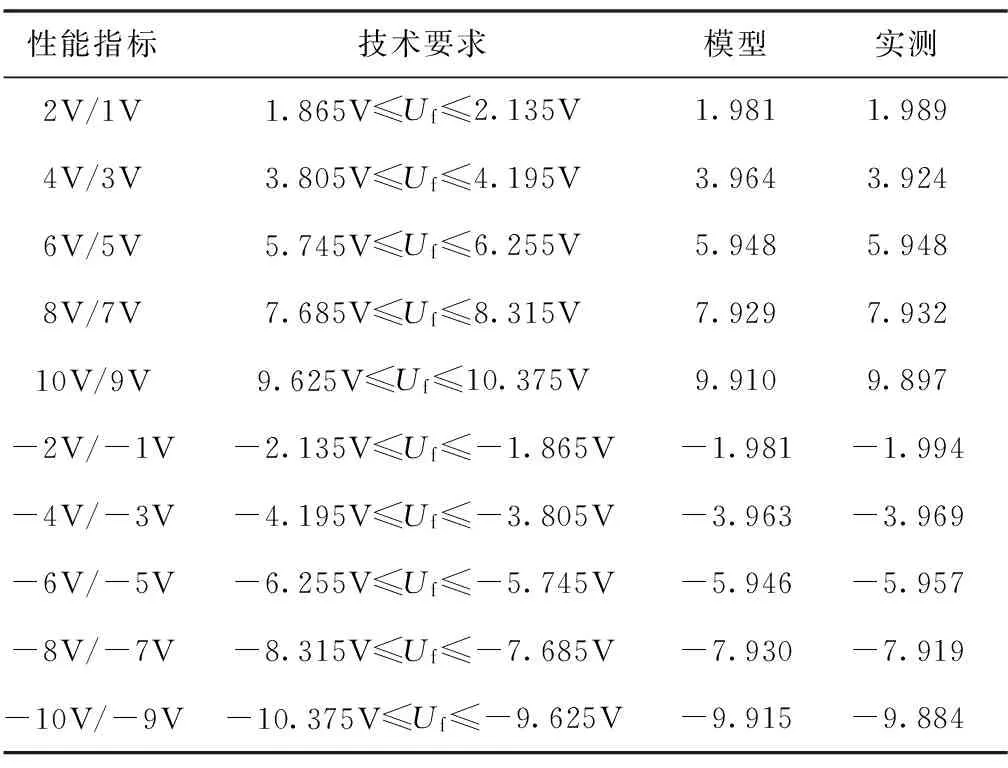
表2 仿真與實測傳遞系數(shù)對比Tab.2 The transfer co efficient contrast between simulation and test
結果表明,模型通過測試數(shù)據(jù)修正后,其動態(tài)響應與實測數(shù)據(jù)相符較好。通過模型仿真結果與實測結果的對比表明,電動作動器的動力學方程是正確合理的,且模型具有較高的精度。
4 結束語
分別建立了伺服電機、齒輪系、滾珠絲杠副和連桿機構的動力學方程,并將其組合形成較為完整的含非線性因素的電動作動器模型。選擇一種典型產(chǎn)品對其傳遞系數(shù)、頻帶分別進行仿真與實測,結果顯示仿真與實測數(shù)據(jù)十分吻合,表明所建分系統(tǒng)的動力學方程是合理正確的。另外,通過該動力學方程建立的高精度模型可用于系統(tǒng)各項性能參數(shù)的仿真,對于指導作動器的設計和優(yōu)化均具有較大的參考價值。
[1] 李曉貞,朱如鵬,李政民卿,等.齒面摩擦對面齒輪傳動系統(tǒng)振動特性的影響分析[J].振動工程學報,2014,27(4):583-588.
[2] 劉源,王永樂,曹東海,等.一種伺服機構剛度計算方法[J].導航定位與授時,2014,1(2):46-49.
[3] 圣國梁.某雷達天線座齒輪傳動副動力學研究[D].南京:南京理工大學,2008.
[4] 姜洪奎,宋現(xiàn)春.滾珠絲杠副滾珠循環(huán)系統(tǒng)的動力學研究和仿真[J].振動與沖擊,2007,26(3):107-110.
[5] 張靜,郭宏偉,劉榮強,等.空間含鉸可展桁架結構的非線性動力學建模與分析[J].西安交通大學學報,2013,47(11):113-119.
[6] 張勁夫, 許慶余, 張陵.考慮連桿柔性和運動副粘性摩擦的曲柄滑塊機構的動力學建模及計算[J].航空學報,2001,22(3):274-276.
[7] Schreiner K E.Electro-Mechanical Actuator DC Resonant Link Controller[R].NASA Contractor Report 198510.
[8] 耿其東,方志國.偏置式曲柄滑塊機構仿真與運動分析[J].機械工程與自動化,2011(3):49-51.
[9] 彭學峰,魯興舉,呂鳴.基于SIMMechanical的兩輪機器人建模與仿真[J].系統(tǒng)仿真學報,2010(11):2643-2645.
[10] 米良,殷國富,孫明楠,等.基于結合部動力學特性的立柱-主軸系統(tǒng)動力學模型研究[J].農(nóng)業(yè)機械學報,2011,42(12):202-207.
Dynamic Modeling and Simulation of EMA Coupled with Nonlinear Factors
ZHANG Xin-hua, LIU Yuan , HUANG Jian, ZHANG Zhao-kai
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
In order to meet the demands of precision modeling of Electro-Mechanical Actuator in aircraft HILS areas,kinetic equations of subsystems in EMA are described respectively and a complete EMA model with nonlinear factorssuch as clearancestiffness and friction are established.The simulation and the experimental show that the kinetic equations of subsystems are reasonable and correct,and the model has great reference value for the design and optimization of EMA.
Nonlinear factors;EMA;Kinetic equation;Transmission mechanism;Simulation
10.19306/j.cnki.2095-8110.2017.03.017
2016-11-15;
2017-02-01
國家自然科學青年基金(61603051)
張新華(1972-),男,博士,研究員,主要從事機電伺服系統(tǒng)方面的研究。E-mail:sloht0033@126.com
TP275
A
2095-8110(2017)03-0101-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19