脈沖干擾對軟件接收機的影響分析
2017-05-12 02:02:28丁夢羽劉建業戴偉昊
導航定位與授時 2017年3期
丁夢羽,許 睿,劉建業,熊 智,郁 豐,戴偉昊
(1.南京航空航天大學導航研究中心,南京 211100;2.南京航空航天大學航空宇航學院,南京 210016)
脈沖干擾對軟件接收機的影響分析
丁夢羽1,許 睿1,劉建業1,熊 智1,郁 豐2,戴偉昊1
(1.南京航空航天大學導航研究中心,南京 211100;2.南京航空航天大學航空宇航學院,南京 210016)
衛星信號經過長距離傳播,信號能量損耗嚴重,到達地面的功率很弱,容易受到各種干擾的影響。脈沖干擾為常見的干擾類型,所以針對不同功率、不同周期,以及不同占空比的脈沖干擾信號,通過接收前端采集受脈沖干擾的GPS L1信號,利用軟件接收機及多相關器生成技術,詳細分析了脈沖干擾對接收機信號捕獲與跟蹤性能的影響。分析結果表明,周期為1ms的脈沖干擾信號,能對接收機產生強烈的干擾效果,捕獲圖中的噪聲明顯增大;跟蹤過程中,載噪比和相關值突發性減小,造成跟蹤數據異常。而長周期的脈沖信號僅在脈沖到達時影響接收機的捕獲和跟蹤,但由于信號跟蹤不能連續進行,導致偽距觀測量的不連續與導航數據不能正常解碼,從而干擾接收機。
衛星導航;多相關器;捕獲;跟蹤;脈沖干擾
0 引言
目前,全球衛星導航系統(Global Navigation Satellite System,GNSS)已被廣泛地應用于生產生活的眾多方面。然而,信號從衛星到達地面接收機,經過了約2萬km的傳播,到達地面時,信號功率損耗至約-130dBm[1],很容易受到故意或無意的無線電干擾。這些干擾降低了接收機的捕獲能力,增加了跟蹤環路誤差,造成環路失鎖、丟星,最終降低接收機定位的精度、連續性和可靠性[2-3]。因此,通過干擾檢測與抑制等手段,提高GNSS系統抗干擾能力就顯得尤為重要。而GNSS接收機在不同干擾影響下所表現出的特點,則是GNSS抗干擾技術研究的前提,能夠為干擾信號的檢測與抑制算法研究提供必要的理論基礎。
近年來,已有許多分析干擾對接收機影響的方法,如基于接收機前端AGC輸出變化的分析方法[4-5]、基于捕獲環節二維捕獲圖的方法[6-7]等。而分析干擾對跟蹤環路的影響卻相對較少。在跟蹤環路中,利用多相關器技術可獲得接收信號的自相關函數,其優點是通過相關曲線更大程度地復現信號的特征,也是目前研究的熱點,并多用于多徑信號的研究[8],本文將此方法應用于分析脈沖干擾對GNSS接收機捕獲與跟蹤性能的影響。目前,針對脈沖干擾特性的相關研究,大多關注周期在10-6s數量級的短時脈沖對接收機的影響[9-10]。由于短時脈沖周期與C/A碼周期相當,容易影響C/A碼解擴過程中的相干積分結果,導致跟蹤誤差增加,甚至信號失鎖等問題,降低接收機的可靠性。然而,短時脈沖的實現功耗大、成本高[11],因此,本文針對能耗與成本均較低的長周期脈沖干擾,即脈沖周期大于10-3s的脈沖干擾,研究具有不同功率、占空比的脈沖干擾對接收機捕獲與跟蹤性能的影響。
1 脈沖干擾
脈沖干擾信號在時域上,具有周期性與間斷性的特點,可表示為
f(t)=A[ε(t+nT)-ε(t+nT+Tc)]
(1)
其中,ε(t)為階躍信號,A為脈沖幅度,Tc為脈沖寬度,T為脈沖周期。Tc與T的比值Tc/T被定義為占空比,記作DC。脈沖干擾信號在頻域上,表現出明顯的脈沖對稱性,且中心頻率處的譜值最大。
通常,脈沖干擾的產生具有突發性,會突然影響接收機的捕獲、跟蹤和定位結果[12]。
2 信號捕獲和跟蹤算法
接收機中,信號捕獲是為了獲得所接收信號的近似載波多普勒頻率與C/A碼相位。本文采用并行碼相位—串行多普勒的搜索方法,若頻率搜索步長為150Hz,搜索范圍(-4950Hz,4950Hz),搜索次數則為67次。
跟蹤環路是接收機中最為關鍵的模塊之一,能夠精確確定信號的載波多普勒頻率和C/A碼相位,從而測量輸出衛星信號的各種測量值。碼跟蹤環路主要依據偽碼的自相關性工作,具體的自相關函數可表示為
(2)
自相關函數值在τ=0時達到最大,表示進行相關的2個信號完全一致,即時間同步。接收機利用該特性,一方面可以得到接收信號的碼相位,用以獲得偽距觀測量,進而解算接收機位置;另一方面可以剝離接收信號的偽碼,實現解擴,從而得到導航電文。一般而言,接收機利用超前、即時、滯后3路相關器,即可實現衛星信號的跟蹤。通常超前-滯后相關器間隔1chip,為得到更精確的偽距觀測量來提高定位精度,可采用較小間隔的相關器進行跟蹤,如0.2chip[13]。
多相關器則利用多個小間隔相關器對自相關函數進行采樣,相關器的間隔越小,得到的相關曲線準確度越高。圖1所示為基于多相關器的跟蹤環路結構。輸入信號與本地生成的載波相乘,得到剝離載波的同相I和正交Q兩路信號。I、Q兩路信號再分別與一組具有不同時延的本地碼相關,得到同相相關值I1,I2,…,In和正交相關值Q1,Q2,…,Q3。
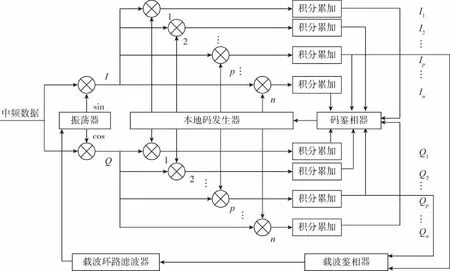
圖1 基于多相關器的跟蹤環框圖Fig.1 Tracking loop diagram with multi-correlators
自相關曲線由一系列同相相關值I1,I2,…,In擬合獲得,在擬合前每個相關值順序經過相干積分器和非相干積分器,以達到減少噪聲的目的。噪聲信號是非相干信號,經過相干積分后得到有效抑制。但受導航數據的長度限制,相干積分時間有限。而非相干積分不受導航數據位翻轉影響,但積分中噪聲也被累加,產生平方損耗[14]。所以采用圖2所示的相干積分和非相干積分組合方式來減小相關值噪聲。

圖2 相干積分與非相干積分組合圖Fig.2 Combination of coherent and incoherent integration
3 仿真與分析
為研究脈沖干擾對GNSS接收機的影響情況,本文利用干擾器與軟件接收機搭建干擾信號的采集與測試系統,分析研究脈沖式干擾對GNSS接收機捕獲與跟蹤性能的影響。
3.1 仿真環境
圖3所示為本文所采用的干擾信號采集系統結構圖。
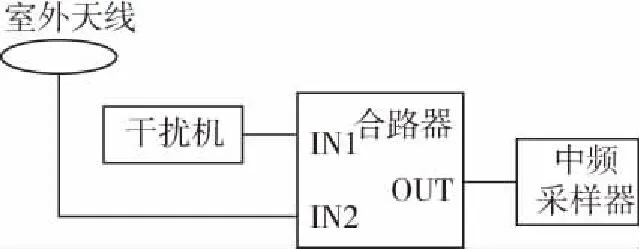
圖3 數據采集結構圖Fig.3 Data acquisition
圖3中,室外天線(31°56′20.44″N,118°47′33.49″E,35.44m)用于接收真實GPS信號,所接收的GPS信號與干擾器生成的脈沖干擾信號經合路器混合,模擬脈沖干擾對GNSS信號的干擾場景。混合后的信號由接收前端(東方聯星NewStar210M中頻采樣器)采集并存儲,最后利用本文所設計的多相關器接收機進行數據解算與分析。仿真參數如表1所示。

表1 仿真參數Tab.1 Simulation parameters
3.2 脈沖干擾在捕獲環節的影響
圖4所示為脈沖干擾影響下的捕獲結果(PRN12)。其中T=10ms和200ms的捕獲圖與T=1s特征類似,取脈沖干擾周期為1s的影響結果作為代表分析:圖4(a)為正常信號的捕獲結果,有明顯的相關峰;脈沖周期為1ms的捕獲結果如圖4(b)所示,噪聲在相隔1000Hz的多普勒頻率處明顯增大。而圖4(c)(d)為脈沖干擾周期為1s時的捕獲情況,由于脈沖干擾周期長,捕獲結果呈現兩種形式:(c)為脈沖未到達時,噪聲很弱,有明顯相關峰;而(d)時,脈沖到達,信號完全被脈沖干擾淹沒,接收機很難捕獲到衛星。
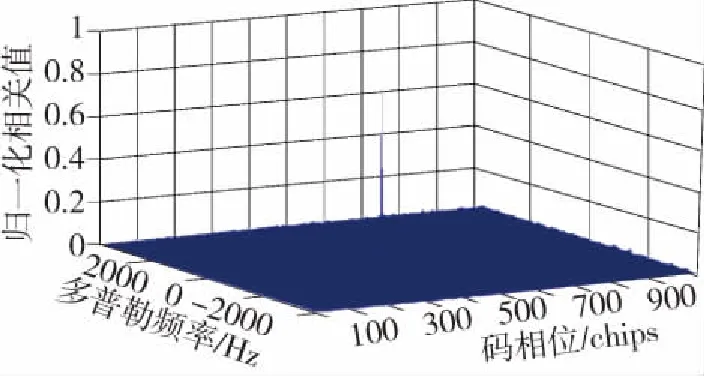
(a) 正常信號
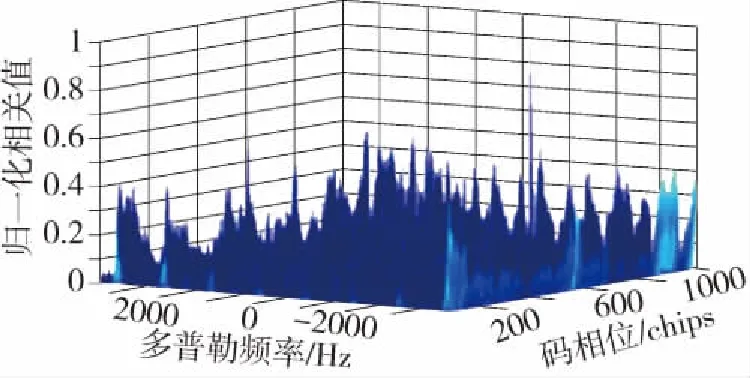
(b) T=1ms
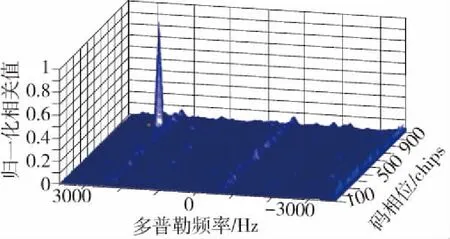
(c) T=1s脈沖未到達
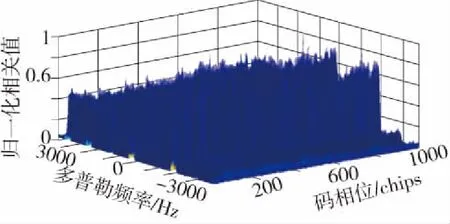
(d) T=1s脈沖到達圖4 脈沖干擾下接收機捕獲結果(DC=0.3,P=-60dBm)Fig.4 Acquisition results with pulse interference
可見,從1ms到1s,脈沖干擾周期變長,對比(c)(d)可以看出,脈沖干擾未作用時,基底噪聲很小,當脈沖到達時,基底噪聲變大。而(b)在周期為1ms的脈沖信號干擾下,基底噪聲始終很大,說明小周期的脈沖干擾持續影響信號的捕獲,而長周期的脈沖干擾只在脈沖存在時對信號產生影響。
同功率、同周期,不同占空比的脈沖干擾下可捕獲的數據分析結果與DC=0.3時仿真分析結果相似,但DC=0.7和DC=0.5時,周期為1ms的脈沖干擾將衛星信號完全淹沒,無法捕獲該衛星信號;而在相同占空比和周期的干擾下,結果表明隨功率的增大,信號的干擾和噪聲基底的幅值增大,捕獲概率隨之變小。
由于衛星信號中C/A碼周期是1ms,而脈沖干擾的實際作用時間為T×DC,當T為1ms時,脈沖干擾持續影響接收機每一毫秒的相干積分結果,嚴重降低捕獲性能。而當T?1ms時,脈沖持續時間大于1ms,會影響相干積分結果,造成捕獲性能下降,但在脈沖消失階段時,接收機則可能捕獲上衛星信號。
3.3 脈沖干擾在跟蹤環節的影響
1)載噪比變化
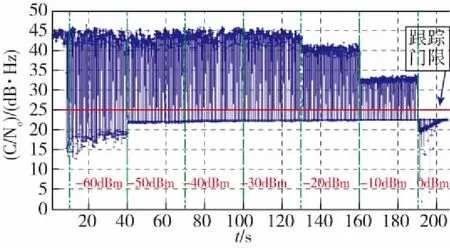
圖5 不同功率脈沖干擾的信號C/N0變化情況Fig.5 The C/N0 of signal with different powerpulse interference
在接收機的軟硬件參數不變的情況下,載噪密度(Carrier to Noise Density ratio,C/N0,本文簡稱載噪比)受接收到信號的信噪比影響,可以反映信號信噪比的變化情況。圖5所示為不同功率的脈沖干擾下,C/N0的變化情況。C/N0由相關器輸出值(Ip、Qp)根據PRM估計算法[15-16](Power Ratio Method)獲得。仿真中,從10s開始加入DC=0.3,T=200ms的脈沖干擾,干擾信號功率從-60dBm,每經過30s增加10dB,直至-10dBm。圖5中,C/N0在0~10s未受干擾期間,維持在44dB·Hz;受脈沖干擾后,C/N0出現周期性的衰減,該周期與脈沖干擾周期一致,而衰減時間與脈沖持續時間一致;脈沖干擾的功率增大到0dBm,C/N0值減小到23dB·Hz,持續低于跟蹤門限(25dB·Hz)。整體上,脈沖干擾功率增大會壓制信號的功率。
圖6所示為DC=0.3,P=-60dBm時,不同周期的脈沖干擾對載噪比的影響情況。T=1ms和10ms時,信號受干擾壓制,C/N0下降10dB·Hz。由于脈沖干擾的頻率高,所以載噪比劇烈振蕩,振蕩范圍約15dB·Hz;而T=200ms和1s時,C/N0出現周期性跳變,與圖5所示情況類似,其變化和脈沖出現頻率一致,脈沖到達,C/N0就突然大幅下降,脈沖消失,其恢復到較高水平。
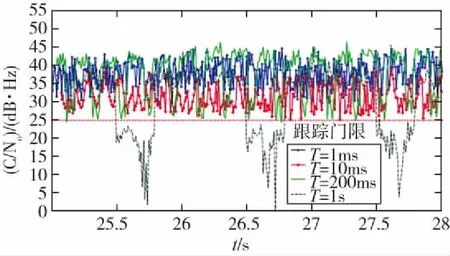
圖6 不同周期脈沖干擾下C/N0變化情況Fig.6 The C/N0 of pulse interfered signal with different periods
仿真還分析了T=10ms,不同占空比干擾影響的載噪比變化,其中DC=0.7時,接收機無法跟蹤信號,無有效C/N0值;DC=0.5時,C/N0持續振蕩,與DC=0.3的變化類似。而T=200ms的干擾下不同占空比的載噪比變化情況如圖7所示,隨占空比增大,C/N0在低值范圍的保持時間變長,與脈沖時間一致,在脈沖消失后,C/N0仍能恢復到較高水平。周期為1s的不同占空比干擾下的C/N0變化情況與周期為200ms一致。
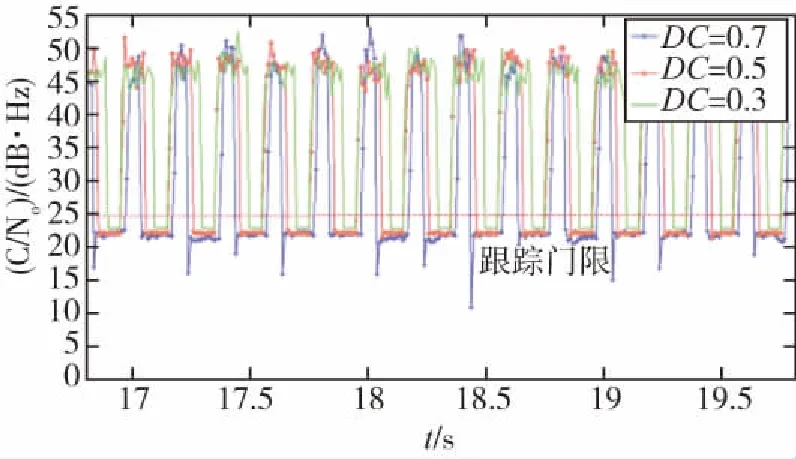
圖7 不同占空比的脈沖干擾下C/N0變化情況Fig.7 The C/N0 of pulse interfered signal with different duty cycles
綜上,周期為1ms和10ms的脈沖干擾下,C/N0衰減后的值依舊在跟蹤門限上,而周期200ms和1s的脈沖干擾下,C/N0衰減后的值接近或遠低于跟蹤門限,因此需結合跟蹤結果判斷信號是否失鎖。
2)相關值變化
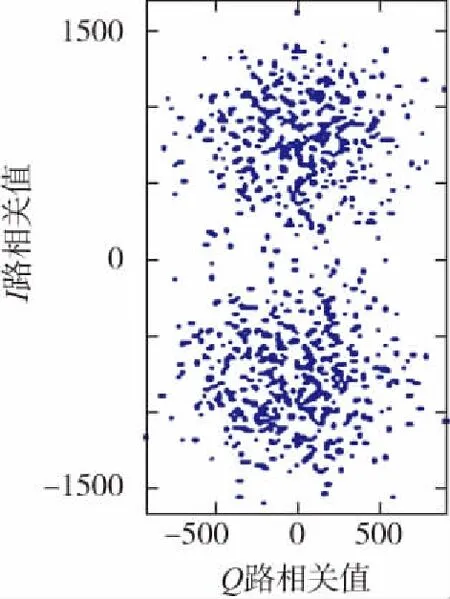
圖8所示為P=-60dBm,不同周期和占空比的脈沖干擾下的即時相關值散點(I-Q散點)圖。無干擾時,I-Q散點圖聚集度高,呈現出對稱的2個圓形[13]。而在脈沖干擾下的散點圖表現有所不同,如圖8所示:加入脈沖干擾后散點圖的離散程度變大。相同周期的脈沖干擾下,占空比增大,導致信號被干擾影響的時間變長,失鎖時間變長,所以I-Q在原點處集中度變高。
(a)T=1ms,DC=0.3
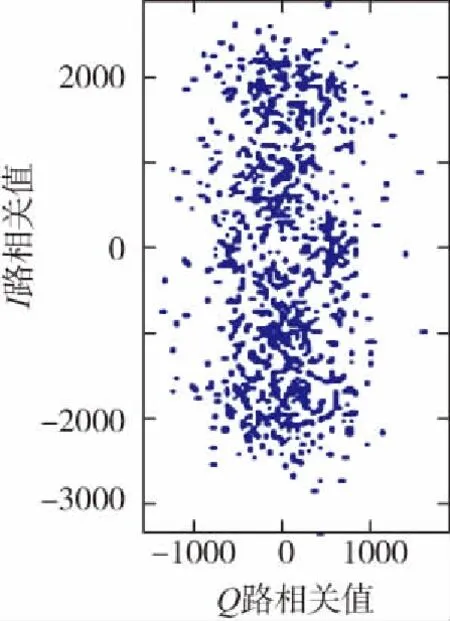
(b)T=10ms,DC=0.3
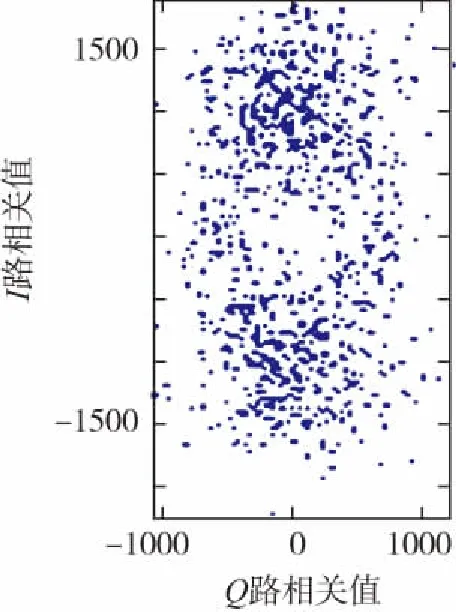
(c)T=1s,DC=0.3
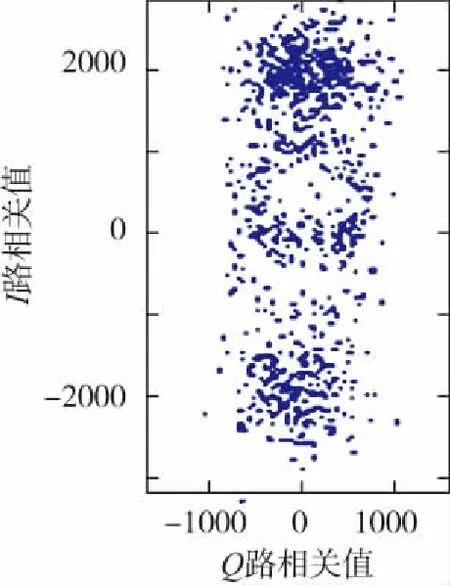
(d)T=200ms,DC=0.3
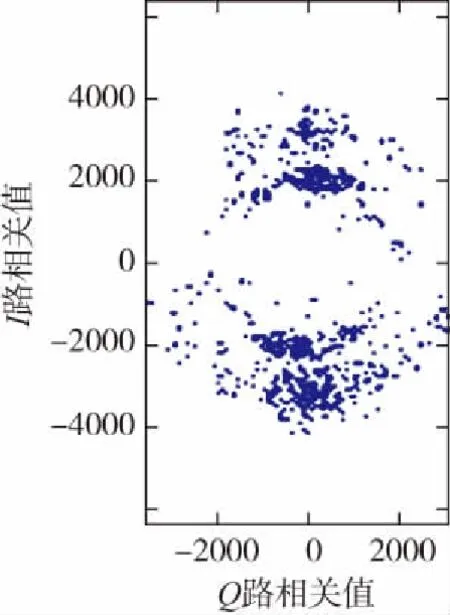
(e)T=200ms,DC=0.5
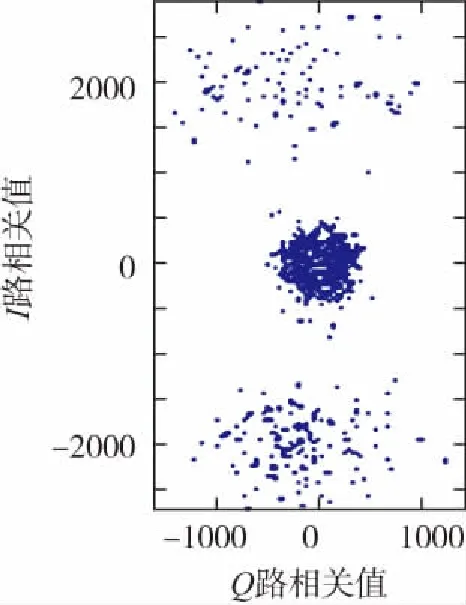
(f)T=200ms,DC=0.7
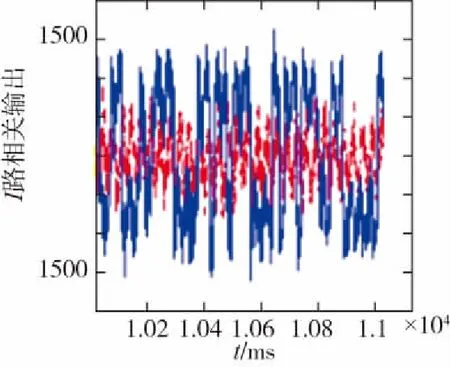
(a)T=1ms,DC=0.3
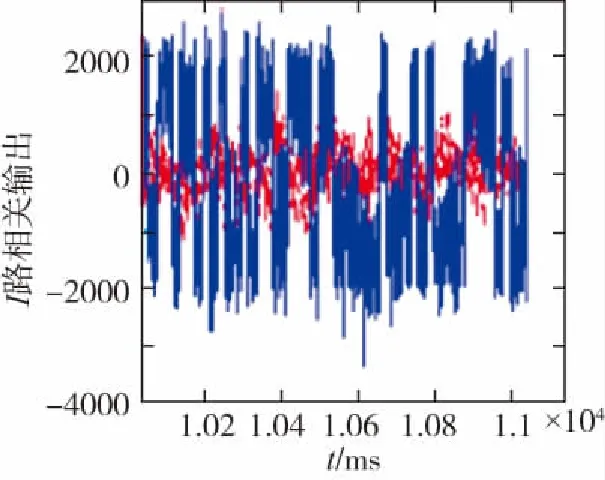
(b)T=10ms,DC=0.3
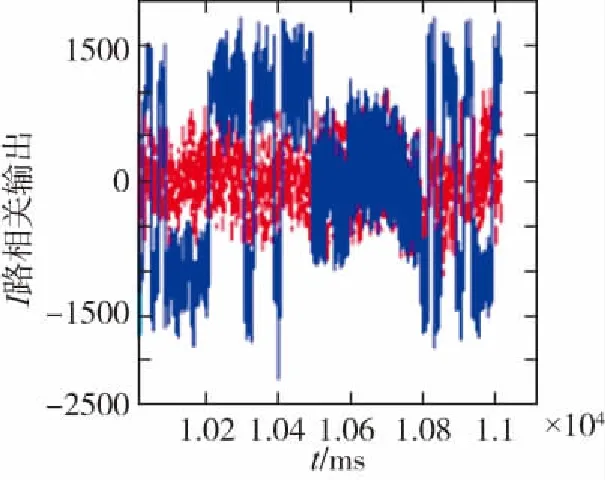
(c)T=1s,DC=0.3
(d)T=200ms,DC=0.3
(e)T=200ms,DC=0.5
(f)T=200ms,DC=0.7圖9 不同脈沖干擾下的即時相關值Fig.9 Present correlation under different pulse interference
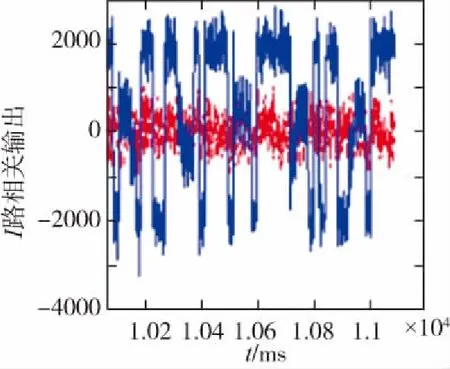
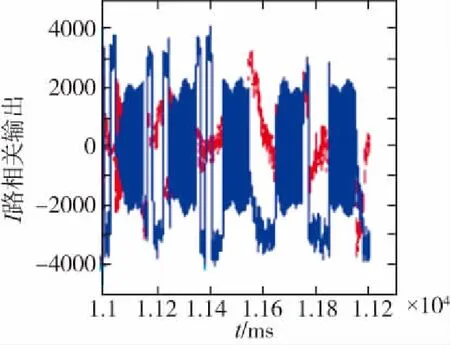
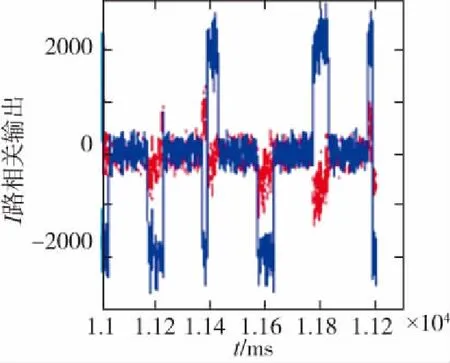
圖9所示為P=-60dBm,不同周期和占空比脈沖干擾影響下,即時相關值隨時間變化情況。藍色實線為同相支路的即時相關值,紅色點劃線為噪聲測量誤差等引起的正交支路即時相關值。在DC=0.3的情況下:(a)為T=1ms的脈沖干擾下的跟蹤結果,由于導航數據比特率為50bit/s,跟蹤模塊采樣頻率為1000sps,所以20個跟蹤值替換為1個導航數據值,但是由于即時相關值波動很大,導致很多即時相關值不能保持20ms就發生反相,這種狀況會導致導航數據的錯誤解碼或缺失,定位結果有誤差或不能定位;(b)為T=10ms的脈沖干擾下的跟蹤結果,相關值抖動頻率與脈沖頻率一致,但由于相關值抖動范圍大,結合散點圖可知信號離散度大,接近失鎖,接收機很難定位;(d)(c)為T=200ms和1s的脈沖干擾下的跟蹤結果,失鎖每200ms和1s出現一次,每次持續60ms和300ms,其余時刻保持跟蹤,這與預設脈沖參數吻合,由于失鎖導致導航數據斷續,因此不能得到穩定的定位結果。在T=200ms的情況下:圖9(d)(e)(f)是占空比分別為0.3、0.5和0.7的干擾下的跟蹤結果,失鎖每200ms出現一次,每次持續時長分別是60ms、100ms和140ms,其余時刻保持跟蹤狀態,與預設脈沖參數一致。仿真還分析了周期為10ms和1s的不同占空比下的干擾情況,其中周期10ms的干擾下,隨占空比增大,跟蹤效果變差,部分環路完全失鎖。而對于周期為1s的不同占空比下,信號失鎖長度也隨占空比的變大而變長。
對比分析可知:T=1ms及以下的脈沖干擾能夠對接收機的跟蹤產生連續性的影響,造成導航數據的錯誤甚至完全失鎖,影響定位結果;當周期增大時,脈沖干擾壓制信號并造成相關值振蕩,導致接收機受到斷續的干擾,解調出的導航數據不連續,接收機不能持續穩定輸出跟蹤結果,而當T和DC使得接收機不受脈沖干擾的時間足夠大時,接收機能根據斷續的跟蹤結果進行定位,這種情況時干擾意義不大。
3)相關曲線變化
不同狀態下的相關曲線特性不同,綜合分析各項數據,正常信號相關曲線圖與T=200ms,DC=0.3,P=-60dBm脈沖干擾未到達的曲線特征相似,各參數下脈沖干擾到達時的相關曲線表現特點也類似,所以截取了200ms的相關曲線變化分析。
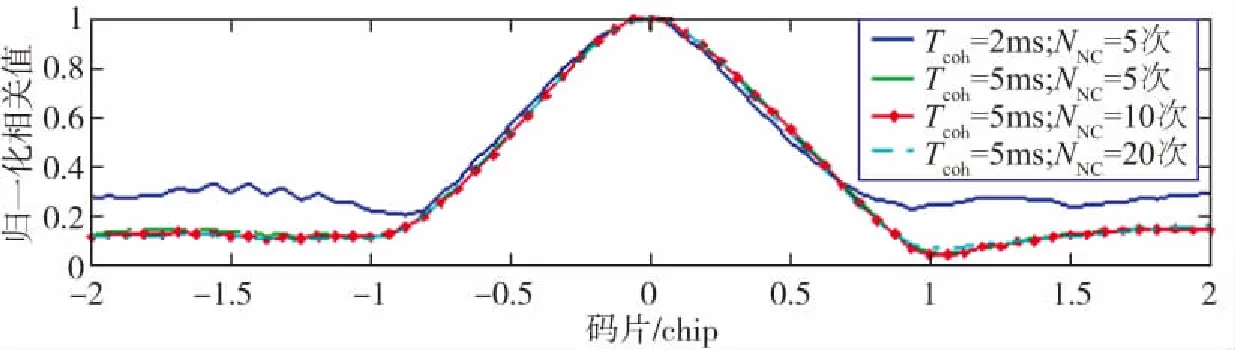
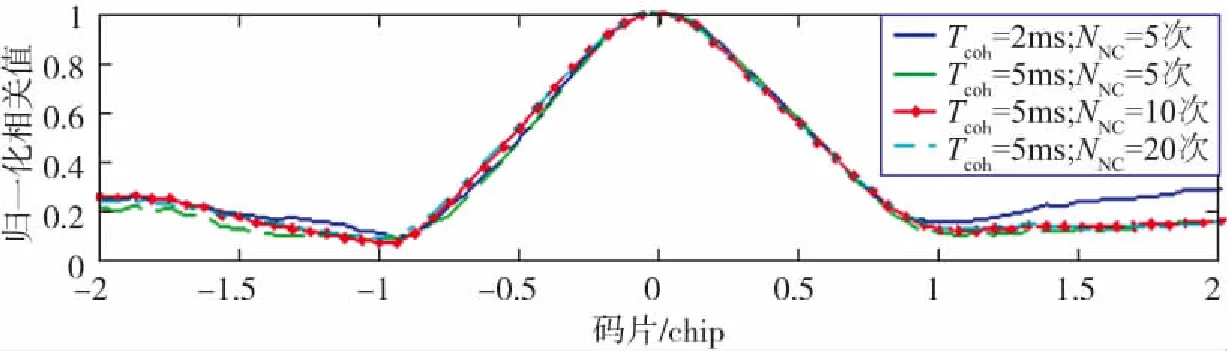
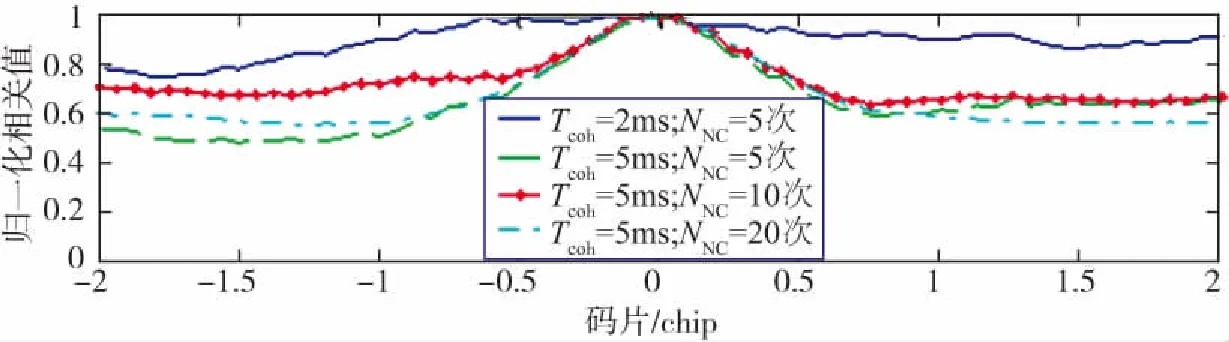
圖10所示為T=200ms,DC=0.3,P=-60dBm的脈沖干擾下,相關值經過相干積分和非相干積分消噪處理并歸一化后擬合的相關曲線圖。圖10(a)為脈沖信號未到達時正常數據的相關曲線圖,理想相關曲線是關于0時間軸左右對稱的三角形[13],此時的相關曲線圖與理想相關曲線的趨勢類似,左右接近對稱,在0碼片處有明顯的相關峰。圖10(b)為有脈沖干擾和正常信號混合的相關曲線圖。可以看出,增大Tcoh和NNC能夠很好地改善相關曲線的平滑性和對稱性。但在-1.5chip的相位處,曲線出現上翹。是由于圖10(b)是脈沖出現但還沒有完全淹沒信號的情況,所以信號存在畸變,但還有明顯相關峰;而圖10(c)時,截取了一段脈沖強度增大到完全淹沒信號,可以看出Tcoh=2ms、NNC=5次的相關曲線變形嚴重,沒有相關峰出現。增大相干積分時間和非相干積分次數后,1碼片外的相關值依舊很大,均在0.5以上,這時脈沖干擾存在造成的曲線與正常相關曲線仍有較大差別,相關器輸出結果不理想。同時也說明了相干積分與非相干積分結合處理相關值的方法不能很好地改善脈沖干擾對衛星數據的影響。
圖10(c)中當積分次數增到20次以上,相關曲線的0碼片處出現小峰值,是由于積分時間變長,參與擬合的數據變長,大于脈沖干擾作用的60ms,包含了部分未受脈沖干擾影響信號的相關值,因此有峰值出現。
(a)
(b)
(c)圖10 相關曲線圖Fig.10 Correlation curve
4 結論
本文針對不同功率、不同周期和不同占空比的脈沖干擾對GNSS接收機的捕獲和跟蹤的影響進行分析,研究發現:
接收機性能隨干擾功率的增大而變差。而在干擾功率一定,周期為1ms的脈沖干擾作用時,信號捕獲圖中多普勒每1000Hz處噪聲明顯增加,當干擾功率或占空比增大時,甚至導致不能捕獲信號;跟蹤過程中載噪比和即時相關值波動劇烈,接收機受到連續影響,導航數據波動劇烈,定位可靠性低。周期大于1ms的脈沖干擾作用時,信號僅在脈沖到達時受影響。在跟蹤過程中,脈沖到達,環路失鎖,脈沖消失,環路恢復跟蹤。隨著脈沖占空比越大,脈沖作用時間變長,環路失鎖時間越長,缺失的導航數據越多。因此脈沖干擾周期大于1ms時,對接收機的影響是斷續的,而當脈沖干擾周期小于或等于1ms時,接收機的捕獲和跟蹤性能都持續受到嚴重影響。所以后者在今后的仿真GNSS信號干擾和研究抗干擾上有更實際的應用。
在相關曲線輔助脈沖干擾的研究中,相干積分和非相干積分能消弱噪聲的影響,而當信號中存在脈沖干擾時,干擾導致的曲線畸變卻不能由這種方法完全消除。這一現象為干擾檢測提供一種新方向,但是針對干擾作用的時間,合理的積分時間和次數配置方案是需要進一步探索的。
[1] 董李梅.帶波束指向的GPS抗干擾技術研究[J].導航定位與授時, 2016, 3(2):53-58.
[2] 武成鋒, 彭元, 何子君,等.衛星導航干擾與抗干擾技術綜述[J].導航定位與授時, 2014, 1(2)59-63.
[3] 范廣偉, 晁磊, 劉莉.衛星導航干擾監測技術[J].四川兵工學報, 2013, 34(6):125-128.
[4] Ndili A, Enge P.GPS receiver autonomous interference detection[C]//Position Location and Navigation Symposium, IEEE.1998:123-130.
[5] 尚曉輝, 宋曉輝, 張玉.陣列抗干擾射頻接收機設計[J].無線電工程, 2015(5):43-45.
[6] 馬經緯, 王延東, 江晟.一種改進的GPS接收機弱信號捕獲算法[J].四川兵工學報, 2015(10):111-115.
[7] Deshpande S M.Study of interference effects on GPS signal acquisition[D].Calgary :University of Calgary, 2004.
[8] 陳軻, 歸慶明, 岳利群.一種基于多相關器的GPS多徑估計方法[J].宇航學報, 2012, 33(9):1241-1247.
[9] 曾祥華, 周益, 李崢嶸,等.衛星導航接收機中短時脈沖干擾抑制方法[J].數據采集與處理, 2013, 28(1):77-81.
[10] 張智香, 劉小龍, 陳錦,等.高重頻超寬譜短電磁脈沖對GPS接收機干擾[J].強激光與粒子束, 2014, 26(3):171-176.
[11] 江偉華.高重復頻率脈沖功率技術及其應用:(7)主要技術問題和未來發展趨勢[J].強激光與粒子束, 2015(1):8-12.
[12] 李流麗, 王文益, 盧丹,等.基于改進的功率倒置法在GNSS中抑制DME脈沖干擾[C]//中國衛星導航學術年會.2015.
[13] Kaplan E D, Hegarty C.Understanding GPS : principles and applications[M].Boston:Artech House, 2006.
[14] 楊東凱, 張其善.GNSS反射信號處理基礎與實踐[M].北京:電子工業出版社, 2012.
[15] Pini M, Falletti E, Fantino M.Performance Evaluation of C/N0Estimators Using a Real Time GNSS Software Receiver[C]//International Symposium on Spread Spectrum Techniques and Applications.IEEE, 2008:28-31.
[16] Sharawi M S, Akos D M, Aloi D N.GPS C/N0estimation in the presence of interference and limited quantization levels[J].IEEE Transactions on Aerospace & Electronic Systems, 2007, 43(1):227-238.
Analysis of Pulse Interference Effects on the Software Receiver
DING Meng-yu1, XU Rui1, LIU Jian-ye1, XIONG Zhi1, YU Feng2, DAI Wei-hao1
(1.Navigation Research Center, Nanjing University of Aeronautics and Astronautics, Nanjing 211100, China;2.College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;)
After long distance transmission, the power of satellite signals reaching the ground experiences serious loss and is very weak.Thus, the signals can easily be affected by various kinds of interference.As pulse interference is a typical interference, the effects of the periodic pulse interference with different power, period and duty cycle on the GPS L1 signals are analyzed in the paper.Firstly, the interfered GPS L1 signals are collected by a GNSS Front End and analyzed in a software receiver.Then, we focused on the pulse interference effects on the acquisition and tracking processes of the receiver and multi-correlators are used to generate the auto-correlation function.Finally, the test results show that the pulse interference with a short period (1ms) degrades the receiver performance significantly.In acquisition process, the noise level increases and the peak value referring to the satellite signal reduces correspondingly.The values of the correlation and C/N0decrease suddenly during tracking process.However, the pulse interference with a long period affects the receiver only when the pulse arrives.The discrete signal tracking leads to discontinuous pseudorange measurements and abnormal navigation data, hence the receiver is interfered.
Satellite navigation; Multi-correlator; Acquisition; Tracking; Pulse interference
10.19306/j.cnki.2095-8110.2017.03.010
2016-10-20;
2017-02-06
科研基地(理工類)創新基金(XCA16028)
丁夢羽(1994-),女,碩士,主要從事GNSS軟件接收機應用與GNSS抗干擾技術的研究。E-mail:mengyuding@nuaa.edu.cn
TN967.1;TN97
A
2095-8110(2017)03-0058-08
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
鴨綠江(2021年35期)2021-04-19 12:24:18
當代陜西(2021年2期)2021-03-29 07:41:24
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00