理想通信條件下彈星協(xié)同定位方法*
2017-05-13 02:16:33段佳珍曹菲白福忠
現(xiàn)代防御技術(shù) 2017年2期
段佳珍,曹菲,白福忠
(火箭軍工程大學(xué),陜西 西安 710025)
理想通信條件下彈星協(xié)同定位方法*
段佳珍,曹菲,白福忠
(火箭軍工程大學(xué),陜西 西安 710025)
為了提高彈載電子偵察設(shè)備的定位精度,對(duì)目標(biāo)實(shí)施更精確的打擊,提出了理想通信條件下的彈星協(xié)同定位方法,對(duì)基于概率的定位原理進(jìn)行了分析,對(duì)定位系統(tǒng)的架構(gòu)及定位流程做了說明,并在STK中做了仿真演示,提出基于概率的彈星協(xié)同定位算法,給出了該算法的數(shù)學(xué)推導(dǎo),并對(duì)算法進(jìn)行了仿真實(shí)驗(yàn),驗(yàn)證了該算法的有效性并對(duì)算法性能做了一定分析。
電子戰(zhàn);協(xié)同定位;相位干涉儀;模糊相位差;最大后驗(yàn)概率;STK
0 引言
隨著電子戰(zhàn)水平的迅速提高,電子戰(zhàn)在現(xiàn)代戰(zhàn)爭(zhēng)中起著越來越重要的作用[1]。對(duì)敵輻射源進(jìn)行精確定位,是反輻射武器高效能打擊的前提。但是,電子偵察設(shè)備面臨的電磁環(huán)境日趨復(fù)雜,不易實(shí)現(xiàn)對(duì)目標(biāo)的精確定位,想要改善設(shè)備性能則成本大、耗時(shí)長(zhǎng),考慮到空天偵察技術(shù)的大力發(fā)展,衛(wèi)星資源越來越豐富,且衛(wèi)星具有偵察范圍廣,不受氣候影響等得天獨(dú)厚的優(yōu)勢(shì),因此,在保證時(shí)間窗口的條件下,利用衛(wèi)星與導(dǎo)彈協(xié)同定位[2]可以很大程度上提高對(duì)目標(biāo)的定位精度,在實(shí)際作戰(zhàn)中有非常重大的意義。
1 基于概率的定位原理
通過觀測(cè)站被動(dòng)接收非合作輻射源信號(hào)并確定其位置的無源定位技術(shù)在偵察、監(jiān)視、預(yù)警等領(lǐng)域受到廣泛關(guān)注和研究[3]。在無源定位技術(shù)中,常采用測(cè)向交叉定位法[4],即利用運(yùn)動(dòng)觀測(cè)器多次測(cè)量信號(hào)來波方向(direction of arrival,DOA)的交叉實(shí)現(xiàn)對(duì)輻射源定位。為了能夠更精確測(cè)量DOA,常采用相位干涉儀法[5]測(cè)向,但當(dāng)基線長(zhǎng)度大于信號(hào)半倍波長(zhǎng)時(shí),干涉儀相位差的測(cè)量會(huì)出現(xiàn)2nπ模糊從而導(dǎo)致測(cè)向模糊,受直接利用信號(hào)估計(jì)輻射源位置的直接定位(direct position determination,DPD)方法[6]的啟示,用概率的思維,考慮直接利用干涉儀鑒相器輸出的模糊相位差實(shí)現(xiàn)對(duì)輻射源目標(biāo)的定位,如圖1所示。
圖1 定位原理框圖Fig.1 Block diagram of localization principle
無源定位系統(tǒng)每一次測(cè)量可以給出一個(gè)定位子集,設(shè)該子集為M。由于存在測(cè)量誤差,那么輻射源有可能不在M之內(nèi),但這種情況發(fā)生的概率要遠(yuǎn)遠(yuǎn)小于落在M之內(nèi)的概率,那么就可以用概率的思維來分析定位問題。在每一次測(cè)量中,輻射源隨機(jī)分布在衛(wèi)星偵察區(qū)域的任一位置上,但分布在各位置上的概率是不同的,分布在M內(nèi)的概率要比分布在M外的概率大,并且離M越遠(yuǎn),分布概率越小。經(jīng)過多次測(cè)量后就會(huì)得到多個(gè)定位子集,每一個(gè)定位子集對(duì)應(yīng)目標(biāo)可能落在某一位置上概率密度。一般來說,每次測(cè)量都是獨(dú)立、不相關(guān)的,那么目標(biāo)落在某一具體位置的概率就是每次測(cè)量對(duì)應(yīng)的概率之積。
假設(shè)某個(gè)觀測(cè)量W的測(cè)量值為W0,用概率密度函數(shù)來描述觀測(cè)量W的分布
(1)
觀測(cè)量W對(duì)應(yīng)一個(gè)子集,設(shè)輻射源坐標(biāo)點(diǎn)與測(cè)量值之間的關(guān)系為
f(x,y,z)=W.
(2)
將f(x,y,z)展開為泰勒級(jí)數(shù)和的形式


(3)
那么式(1)變?yōu)?/p>
(4)
這樣,就把概率密度函數(shù)與坐標(biāo)聯(lián)系在一起。此時(shí),“定位”的概念就稱為從已知的觀測(cè)量中求取在概率意義上最可能的一個(gè)空間坐標(biāo)。
多次測(cè)量的概率密度函數(shù)通常由單次測(cè)量的概率密度函數(shù)相乘產(chǎn)生。即總概率密度函數(shù)指數(shù)為
FT(x,y,z)=∑Fi(x,y,z).
(5)
由于指數(shù)函數(shù)是單調(diào)函數(shù),那么總概率密度函數(shù)的峰值是存在且唯一的。并且從上面的分析可知,總概率密度函數(shù)峰值的位置就是輻射源的位置。
2 彈星協(xié)同定位架構(gòu)及流程[7]
如圖2所示,整個(gè)定位系統(tǒng)由導(dǎo)彈、衛(wèi)星及敵輻射源目標(biāo)組成,假設(shè)導(dǎo)彈與衛(wèi)星可視即可通信,且收發(fā)順利。
圖2 彈星協(xié)同定位示意圖Fig.2 Sketch map of missile-satellite co-location
導(dǎo)彈在飛行過程中接收到的來自衛(wèi)星的敵輻射源目標(biāo)信息,能夠協(xié)助導(dǎo)彈更好地跟蹤目標(biāo),實(shí)施精確打擊,具體流程[8]如圖3所示。

圖3 彈星協(xié)同定位流程圖Fig.3 Flow chart of missile-satellite co-location
導(dǎo)彈作為協(xié)同發(fā)起者,主導(dǎo)整個(gè)協(xié)同過程[9]。衛(wèi)星對(duì)目標(biāo)區(qū)域?qū)嵤┎婚g斷偵察,導(dǎo)彈在指定時(shí)間、指定地點(diǎn)發(fā)射后,滿足時(shí)間窗口的衛(wèi)星在一段時(shí)間內(nèi)為其實(shí)時(shí)傳輸目標(biāo)參數(shù)信息,導(dǎo)彈將自身雷達(dá)探測(cè)到的目標(biāo)參數(shù)信息與衛(wèi)星提供的信息進(jìn)行融合處理,解算出目標(biāo)位置,保證實(shí)現(xiàn)精確打擊[10]。
3 基于最大后驗(yàn)概率的彈星協(xié)同定位算法
基于概率的彈星無源定位算法[11]是以干涉儀輸出的模糊相位差[12]為信息依據(jù),無需解相位模糊,即可實(shí)現(xiàn)對(duì)輻射源的精確定位,具有定位精度高、速度快和穩(wěn)定性好的優(yōu)點(diǎn)。
3.1 目標(biāo)估計(jì)區(qū)域確定
根據(jù)目標(biāo)的先驗(yàn)信息、導(dǎo)彈的飛行軌跡、衛(wèi)星的軌道,可以先確定一個(gè)以衛(wèi)星星下點(diǎn)為中心的初始目標(biāo)搜索區(qū)域。為減小后驗(yàn)概率的計(jì)算量,把該區(qū)域均勻細(xì)分為n個(gè)子區(qū)域,子區(qū)域大小為(ΔL,ΔB),并取各子區(qū)域的中心點(diǎn)作為后驗(yàn)概率的計(jì)算點(diǎn),如圖4所示。
3.2 后驗(yàn)概率計(jì)算
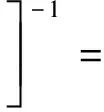
在ECF坐標(biāo)系下,以導(dǎo)彈為例,如圖5所示,導(dǎo)彈位置矢量: S=(sx,sy,sz);導(dǎo)彈天線位置矢量: M=(mx,my,mz)。導(dǎo)彈位置矢量和導(dǎo)彈天線位置矢量可以通過北斗衛(wèi)星導(dǎo)航系統(tǒng)(Beidounavigitionsatellitesystem,BDS)測(cè)量獲得,精度可滿足本系統(tǒng)的使用要求。設(shè)目標(biāo)估計(jì)區(qū)域內(nèi)任意一點(diǎn)T=(tx,ty,tz),干涉儀輸出相位差[13]為

圖4 細(xì)分目標(biāo)區(qū)域圖Fig.4 Subdivision of target area
(6)
式中:d為干涉儀基線的長(zhǎng)度;λ為目標(biāo)輻射源的波長(zhǎng);n為模糊數(shù),并且
cosθ=[(tx-sx)mx+(ty-sy)my+

(7)
在(tx,ty,tz)處干涉儀輸出相位差φ的值受sx,sy,sz,mx,my,mz,λ的影響是獨(dú)立的,那么由式(6)可得
P[φ/(tx,ty,tz)]=P(sx)P(sy)P(sz)·
P(mx)P(my)P(mz)P(λ).
(8)
圖5 平臺(tái)搭載干涉儀模型圖Fig.5 Model diagram of platform borne interferometer
目標(biāo)在目標(biāo)估計(jì)區(qū)域內(nèi)概率相等,設(shè)干涉儀測(cè)量的相位差為φm(模糊相位),計(jì)算后驗(yàn)概率為
P[(tx,ty,tz)/φm]=P[(tx,ty,tz)]·
P[φm/(tx,ty,tz)]·[∫P[φm/(tx,ty,tz)]dδ]-1.
(9)
設(shè)干涉儀測(cè)量相位差的誤差是均值為0的高斯白噪聲,則
φm~N(φ,σ2),
(10)
式中:φ為真值;σ為測(cè)量誤差的標(biāo)準(zhǔn)差。
因此
P[φm/(tx,ty,tz)]=P(φm/φ)P[φ/(tx,ty,tz)]=
P(sx)P(sy)P(sz)P(mx)P(my)P(mz)P(λ).
(11)
則
P[(tx,ty,tz)/φm]=

P(sz)P(mx)P(my)P(mz)P(λ)ΔLΔB·


(12)
式(12)的分母積分后是一個(gè)常數(shù)值,設(shè)
(13)
相位干涉儀在一段時(shí)間內(nèi)經(jīng)過N次觀測(cè)后得到φN=[φ1,φ2,…,φN],φN在(tx,ty,tz)的后驗(yàn)概率為

(14)
式中:C為常數(shù)。
不失一般性,設(shè)C=1,那么
(15)
在實(shí)際應(yīng)用中,測(cè)量誤差較大時(shí)
不便于數(shù)據(jù)處理。因此用概率累加的方式代替概率累積,將式(14)修改為

(16)
稱其為偽后驗(yàn)概率。而偽后驗(yàn)概率最大的點(diǎn)即為目標(biāo)位置的估計(jì)點(diǎn)。
4 仿真實(shí)驗(yàn)
4.1 彈星協(xié)同仿真演示
在STK中仿真[14]如下:如圖6所示,電子偵察衛(wèi)星LD-1,LD-2,LD-3,LD-4,QS-1,QS-2,QS-3按預(yù)定軌道飛行,DF導(dǎo)彈發(fā)射點(diǎn)(108.985 E,19.176 N),目標(biāo)艦船(T)起始位置(94.6031 E,5174 N),導(dǎo)彈于2016-4-5 T 04:25:20發(fā)射。

圖6 彈星通信示意圖Fig.6 Schematic diagram of missile-satellite communication
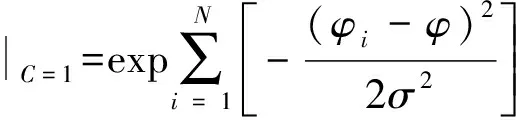
如圖7,8所示,7顆衛(wèi)星中有2顆衛(wèi)星滿足通信要求,可通信時(shí)間分別為440 s和675 s。

圖7 導(dǎo)彈與QS-1星通信時(shí)間Fig.7 Communication time between missile and QS-1
圖8 導(dǎo)彈與QS-3星通信時(shí)間Fig.8 Communication time between missile and QS-3
在已知衛(wèi)星軌道方程情況下,只要時(shí)間確定,就可以求得衛(wèi)星的位置點(diǎn),那么衛(wèi)星的覆蓋范圍也就已知了,如圖9所示。

圖9 衛(wèi)星偵察區(qū)域示意圖Fig.9 Schematic diagram of satellite reconnaissance area
如圖10所示,滿足通信條件的2顆衛(wèi)星中只有QS-3可以偵察到目標(biāo)區(qū)域且該時(shí)間段與導(dǎo)彈飛行時(shí)間重疊,因此QS-3滿足與導(dǎo)彈協(xié)同定位的條件。
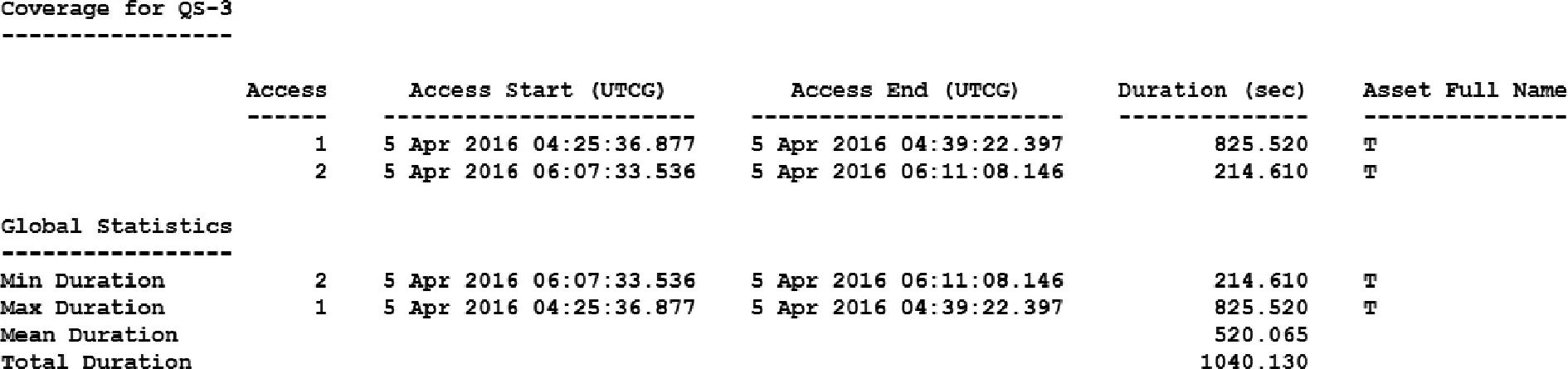
圖10 衛(wèi)星偵察目標(biāo)區(qū)域時(shí)間Fig.10 Time of satellite reconnaissance on target area
4.2 算法仿真案例
4.2.1 參數(shù)設(shè)置
導(dǎo)彈:導(dǎo)彈發(fā)射點(diǎn)坐標(biāo)為(104.8 E,35.9 N,0 km),數(shù)據(jù)更新間隔為0.1 s,基線波長(zhǎng)比為5,相位差測(cè)量誤差為均方根10°的零均值高斯白噪聲。
衛(wèi)星:軌道高度483 km,軌道傾角為45°,數(shù)據(jù)更新間隔為0.1 s,初始基線方向與衛(wèi)星速度方向相同,基線波長(zhǎng)比為5,相位差測(cè)量誤差為均方根10°的零均值高斯白噪聲。
敵輻射源:位于(129.5 E,32.9 N,0 km),輻射的信號(hào)頻率為1.5 GHz。
目標(biāo)估計(jì)區(qū)域:123 E~135 E,27 N~39 N。
4.2.2 仿真實(shí)現(xiàn)[15]
(1) 采用100組相位差
ΔL=ΔB=0.5°,圖11中概率峰值確定的目標(biāo)位置為(129 E,33.5 N)。與實(shí)際目標(biāo)位置相差(0.5 E,0.6 N),這個(gè)結(jié)果雖然可以證明算法的有效性,但誤差還是比較大的,想要得到更精確的結(jié)果,必須增大數(shù)據(jù)采集量,縮小子區(qū)域間隔。
從圖12可以看出定位點(diǎn)相對(duì)比較集中,因此,可以縮小目標(biāo)估計(jì)區(qū)域以減小接下來仿真的計(jì)算量。
圖11 偽后驗(yàn)概率分布圖Fig.11 Pseudo posterior probability distribution map

圖12 等概率示意圖Fig.12 Sketch map of equal probability
(2) 采用400組相位差
將目標(biāo)估計(jì)區(qū)域縮小為127 E~131 E,31 N~35 N。
ΔL=ΔB=0.2°。由圖13可以得到目標(biāo)估計(jì)位置為(129.4 E,33.2 N),與實(shí)際目標(biāo)位置偏差(0.1 E,0.3 N),由此可以看到,隨著數(shù)據(jù)量的增大和子區(qū)域間隔的減小,定位更精確。
圖13 偽后驗(yàn)概率分布圖Fig.13 Pseudo posterior probability distribution map
圖14 偽后驗(yàn)概率分布圖Fig.14 Pseudo posterior probability distribution map
ΔL=ΔB=0.1°。由圖14可以得到目標(biāo)估計(jì)位置為(129.5 E,32.9 N),與實(shí)際目標(biāo)位置一致。由此可見,子區(qū)域分割越精細(xì),確實(shí)可以得到更精確的定位結(jié)果,但是定位時(shí)間相對(duì)也會(huì)延長(zhǎng)。
(3) 100次蒙特卡羅仿真
1) 100組相位差
仿真結(jié)果見圖15,定位均值為(129.480 7 E,32.927 5 N),定位均值與真實(shí)目標(biāo)位置偏差3.544 km,定位的圓概率誤差為22.2 km。
圖15 定位結(jié)果分布圖Fig.15 Localization result distribution map
2) 400組相位差
仿真結(jié)果見圖16,定位均值為(129.496 3 E,32.905 5 N),定位均值與真實(shí)目標(biāo)位置偏差0.701 km,定位的圓概率誤差為9.99 km。
圖16 定位結(jié)果分布圖Fig.16 Localization result distribution map
由仿真結(jié)果可以看到利用最大后驗(yàn)概率算法,的確可以實(shí)現(xiàn)對(duì)目標(biāo)的精確定位,且隨著子區(qū)域間隔的減小和數(shù)據(jù)量的增大,定位精度越來越高。
為了減小測(cè)量誤差對(duì)定位結(jié)果的影響進(jìn)行的100次蒙特卡羅仿真實(shí)驗(yàn)表明,數(shù)據(jù)量為100時(shí),采集數(shù)據(jù)時(shí)間為10 s,圓概率誤差為22.2 km,數(shù)據(jù)量為400時(shí),采集數(shù)據(jù)時(shí)間為40 s,圓概率誤差為9.99 km,由此可得,可利用數(shù)據(jù)量越大,定位精度越高,導(dǎo)彈與衛(wèi)星協(xié)同可以在相同時(shí)間內(nèi)得到2倍的數(shù)據(jù)量,很大程度上提高了對(duì)目標(biāo)的定位精度。
5 結(jié)束語
本文針對(duì)反輻射導(dǎo)彈對(duì)目標(biāo)定位精度不足的問題,介紹了理想通信條件下彈星協(xié)同定位架構(gòu)、定位流程及定位算法,并對(duì)算法進(jìn)行了仿真,證明了該算法的有效性。實(shí)際戰(zhàn)場(chǎng)情況復(fù)雜,想要實(shí)現(xiàn)彈星協(xié)同定位,必須依賴于豐富的衛(wèi)星資源和合理的任務(wù)調(diào)度,相信隨著軍隊(duì)現(xiàn)代化的發(fā)展,大規(guī)模、跨平臺(tái)聯(lián)合作戰(zhàn)能夠很快實(shí)現(xiàn)。
[1] 龍寧.單星無源定位原理及精度分析[J].電訊技術(shù),2012,52(6):17-20. LONG Ning.Single Satellite Passive Localization Principle and Precision Analysis[J]. Telecommunication Engineering, 2012,52(6):17-20.
[2] 劉俊成,張京娟,譚麗芬.新的導(dǎo)彈協(xié)同定位技術(shù)[J].北京航空航天大學(xué)學(xué)報(bào),2012,38(9):1149-1153. LIU Jun-cheng,ZHANG Jing-juan,TAN Li-fen.New Techneque for Multi-Missile Cooperative Localication[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012,38(9):1149-1153.
[3] RONG Y, PEK H F. RF Emittr Geolocation Using Ampllitude Comparison with Auto-Calibrated Relative Antenna Gains[J].IEEE Transactions on Aerospace and Electronic System, 2011,47(3):2098-2110.
[4] 王國(guó)剛.兩站測(cè)向交叉定位相對(duì)誤差幾何稀釋度研究[J].艦船電子工程,2015(12):58-61. WANG Guo-gang.Relative Geometric Dilution of Precision in Double Station Bearing-only Location[J].Ship Electronic Engineering, 2015(12):58-61.
[5] MACPHIE R H, YOON T H. On Using the Compound Interfermeter to Obtain the Power Pattern of a Conventional Receiving Array[J]. IEEE Transactions on Antennas and Propagation,2009,57(10):3356-3359.
[6] WEISS A J. Direct Geolocation of Wideband Emitter based on Delay and Doppler[J].IEEE Transactions on Signal Processing,2011,59(6):2513-2521.
[7] 彭銳暉,王國(guó)宏,陳士舉,等.兩彈協(xié)同定位的可行性研究[J].系統(tǒng)仿真學(xué)報(bào),2006,18(5):1118-1122. PENG Rui-hui,WANG Guo-hong,CHEN Shi-ju,et al.Feasibility Research on Two Missiles’Cooperative Location[J].Journal of System Simulation, 2006,18(5):1118-1122.
[8] 萬華.多傳感器協(xié)同定位技術(shù)[J].艦船電子對(duì)抗,2014,37(3):30-32. WAN Hua.Research into Multi-Sensor Cooperative Location Technology[J].Shipboard Electronic Countermeasure, 2014,37(3):30-32.
[9] CACERES M A, PENNA F, WYMEERSCH H, et al. Hybrid Cooperative Positioning Based on Distributed Belief Propagation[J]. IEEE Journal on Selected Areas in Communications, 2011, 29(10): 1948-1958.
[10] DAS K, WYMEERSCH H. Censored Cooperative Positioning for Dense Wireless Networks[C]∥Proceedings of 2010 IEEE 21st International Symposium on Personal, Indoor and Mobile Radio Communications Workshops (PIMRC Workshops),2010:262-266.
[11] 胡來招.無源定位[M].北京:國(guó)防工業(yè)出版社,2004:31-79. HU Lai-zhao. Passive Locating[M].Beijing:Nationa Defence Industry Press, 2004:31-79.
[12] 劉建林. 多站無源定位技術(shù)研究與應(yīng)用[D]. 西安:西安電子科技大學(xué), 2011. LIU Jian-lin.Research and Application of Multi Station Passive Location Technology[D].Xi’an: Xi’an Electronic Technology University,2011.
[13] 盧厚清,宋歌,陳卓,等.基于逐點(diǎn)交匯的雙星無源定位方法及誤差分析[J].解放軍理工大學(xué)學(xué)報(bào):自然科學(xué)版, 2013,14(6):597-602. LU Hou-qing,SONG Ge,CHEN Zhuo, et al. Double-satellite Passive Location Method and Error Analysis Based on Point By Point Intersection[J]. PLA University of Science and Technology:Natural Science ed,2013,14(6):597-602.
[14] 楊彬,張順健,方勝良,等.基于STK的衛(wèi)星覆蓋模型研究與仿真分析[J].艦船電子對(duì)抗,2016(1):66-71. YANG Bin, ZHANG Shun-jian,FANG Sheng-liang,et al.Research and Simulation Analysis of Satellite Coverage Model Based on STK[J]. Shipboard Electronic Countermeasure, 2016(1):66-71.
[15] 倪天權(quán),王春波,張殿友.兩艦協(xié)同定位誤差分析的研究[J].江蘇科技大學(xué)學(xué)報(bào):自然科學(xué)版,2008,22(2):11-14. NI Tian-quan,WANG Chun-bo,ZHANG Dian-you. Research on Cooperative Locating Error between Two Ships[J].Journal of Jiangsu University of Science and Technology: Natural Science ed, 2008,22(2):11-14.
Missile-Satellite Co-Location Technology Based on Ideal Communication Condition
DUAN Jia-zhen, CAO Fei, BAI Fu-zhong
(Rocket Force University of Engineering, Shaanxi Xi’an 710025, China)
In order to improve the localization precision of airborne electronic reconnaissance equipment, missile-satellite co-location method is proposed. Firstly, the principle of this method is analyzed. Secondly, the structure and process of location system is explained and simulated in STK. Finally, a location algorithm based on the posterior probability maximization principle is recommended, and a mathematical derivation is given. Simulation results show that the algorithm is efficient and robust, and the localization performance is related with the size of the data quantity.
electronic warfare; co-location; phase interferometer; fuzzy phase difference; maximum posterior probablity; STK
2016-04-21;
2016-06-21 作者簡(jiǎn)介:段佳珍(1989-),女,甘肅蘭州人。碩士生,主要從事雷達(dá)電子對(duì)抗方面的研究。
10.3969/j.issn.1009-086x.2017.02.012
P228.1;TP391.9
A
1009-086X(2017)-02-0080-07
通信地址:710025 陜西省西安市灞橋區(qū)同心路2號(hào)4502分隊(duì) E-mail:dbojue1989@163.com