采用神經(jīng)網(wǎng)絡(luò)算法的多指機械手織物抓取規(guī)劃
2017-05-17 08:12:03韋攀東李鵬飛王曉華劉秀平
紡織學(xué)報 2017年1期
關(guān)鍵詞:規(guī)劃
張 蕾, 韋攀東, 李鵬飛, 王曉華, 劉秀平
(西安工程大學(xué) 電子信息學(xué)院, 陜西 西安 710048)
采用神經(jīng)網(wǎng)絡(luò)算法的多指機械手織物抓取規(guī)劃
張 蕾, 韋攀東, 李鵬飛, 王曉華, 劉秀平
(西安工程大學(xué) 電子信息學(xué)院, 陜西 西安 710048)
針對紡織服裝行業(yè)織物自主抓取環(huán)節(jié)依靠人工操作而導(dǎo)致的生產(chǎn)效率低的問題,利用機械手進行織物抓取。設(shè)計了多指機械手,通過描述手指各連桿之間的變換關(guān)系對其進行運動學(xué)分析;采用RBF(徑向基函數(shù))神經(jīng)網(wǎng)絡(luò)方法對其抓取模式進行規(guī)劃,通過識別織物的幾何特征并根據(jù)抓取的任務(wù)要求進行自主抓取;在抓取運動過程中,采用關(guān)節(jié)空間軌跡規(guī)劃和笛卡爾空間軌跡規(guī)劃相結(jié)合的方式,保證機械手各手指能夠穩(wěn)定和準(zhǔn)確地到達抓取點;最后利用MatLab/Robotics Toolbox對多指機械手和抓取規(guī)劃進行建模仿真。結(jié)果表明,所設(shè)計的機械手各個關(guān)節(jié)參數(shù)設(shè)置合理,機械手織物抓取規(guī)劃滿足要求。
多指機械手; 抓取模式規(guī)劃; RBF神經(jīng)網(wǎng)絡(luò); 軌跡規(guī)劃; 織物抓取
隨著“工業(yè)4.0”的到來以及機器人技術(shù)的逐漸成熟,“機器人換人”以減少用工,提高生產(chǎn)效率,將最終成為紡織服裝企業(yè)的現(xiàn)實選擇。機械手是安裝在機器人末端的執(zhí)行機構(gòu),它有效地彌補了傳統(tǒng)工業(yè)機器人抓取方式單一的不足[1-2]。機械手具有擬人手的特性,它高度的靈活性使得通過對其進行合理的抓取規(guī)劃能夠?qū)崿F(xiàn)對任意形狀物體的抓取操作[3]。在紡織服裝行業(yè)中,有很多生產(chǎn)工藝流程的連接是依靠人工完成的,例如自動裁剪、自動配片、自動抓取、服裝吊掛系統(tǒng)等,尤其對于自動抓取環(huán)節(jié)國內(nèi)外研究甚少,導(dǎo)致了服裝智能制造鏈的不完整。本文提出采用機械手解決柔軟織物抓取的問題,對目前紡織服裝行業(yè)的自動化進程具有重要的實際意義。
人們在進行物體抓取時,抓取對象的形狀、大小以及位姿參數(shù)構(gòu)成了抓取模式分類的重要依據(jù)[4-6]。目前,多指機械手抓取模式規(guī)劃大都采用基于知識的方法,通過學(xué)習(xí)或其他方式不斷擴充來對知識庫進行更新,具有計算量小,易實現(xiàn)的優(yōu)點。但知識庫的建立是一個漫長的過程,而且之前建立的規(guī)則難免會與新的規(guī)則發(fā)生沖突,不能保證系統(tǒng)的完整性。RBF神經(jīng)網(wǎng)絡(luò)能夠從環(huán)境中快速地學(xué)習(xí)并在學(xué)習(xí)中提高自身性能,具有最佳局部逼近能力[7-8],采用它進行抓取模式規(guī)劃是十分可行的。
本文結(jié)合柔軟織物特性,設(shè)計多指機械手的結(jié)構(gòu)并進行運動學(xué)分析;提出基于RBF神經(jīng)網(wǎng)絡(luò)的織物抓取模式規(guī)劃,通過提取織物的幾何特征并根據(jù)抓取的任務(wù)要求,建立抓取模式模型,實現(xiàn)自主抓取;對抓取運動過程進行軌跡規(guī)劃,采用關(guān)節(jié)空間和笛卡爾空間混合的軌跡規(guī)劃方式,保證整個抓取操作過程順利完成;并利用MatLab/Robotics Toolbox對機械手和抓取運動過程進行建模仿真,仿真結(jié)果表明,機械手抓取運動軌跡規(guī)劃合理,織物自主抓取操作規(guī)劃過程是可行的。
1 機械手結(jié)構(gòu)設(shè)計與運動學(xué)分析
1.1 機械結(jié)構(gòu)設(shè)計
由于織物的堆放形狀是不確定的[9-10],因而對機械手的結(jié)構(gòu)有很高的要求。2個手指能夠?qū)崿F(xiàn)對簡單物體的抓取,但在手指接觸點連線的旋轉(zhuǎn)方向缺少1個約束條件,導(dǎo)致抓取不穩(wěn)定。多于3個手指的機械手具有更高的靈活性,但存在冗余手指,隨著冗余自由度的增多,控制更加復(fù)雜,這在實際的設(shè)計中是不可取的;因此,本文結(jié)合柔軟織物的特性和機械手自身的性質(zhì),設(shè)計了機械手,結(jié)構(gòu)如圖1所示。機械手具有3個手指,各手指的結(jié)構(gòu)和性質(zhì)相似,每個手指有4個自由度,關(guān)節(jié)類型都為轉(zhuǎn)動關(guān)節(jié),且各手指關(guān)節(jié)軸1垂直于其余3個關(guān)節(jié)軸,保證機械手在操作空間中能夠?qū)椢镞M行任意抓取操作。
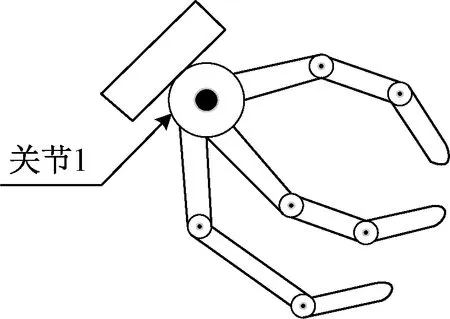
圖1 三指機械手結(jié)構(gòu)Fig.1 Structure of three-fingered dexterous hand
1.2 運動學(xué)分析
機械手運動學(xué)分析,即通過建立手指連桿之間的齊次坐標(biāo)變換關(guān)系,從而求得手指指尖的位姿矩陣,獲取指尖在操作空間中的位置和姿態(tài)。這里以1個手指作為研究對象,其余2個手指與此類似。采用D-H參數(shù)法進行運動學(xué)方程的建立,由所設(shè)計的機械手的結(jié)構(gòu)可得到手指各關(guān)節(jié)量和連桿參數(shù),如表1所示。
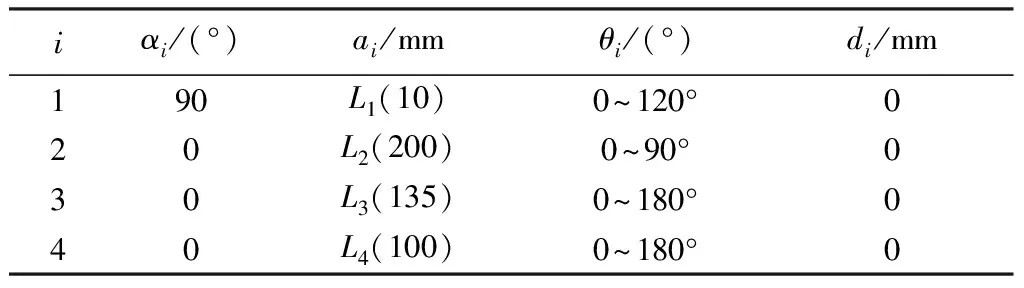
表1 手指連桿D-H參數(shù)表Tab.1 D-H parameters of fingers′ connecting rod
表中:αi代表連桿扭轉(zhuǎn)角,表示相鄰關(guān)節(jié)軸線之間的夾角;ai代表連桿長度,表示相鄰關(guān)節(jié)軸線公垂線長度;θi代表關(guān)節(jié)角度,表示相鄰公垂線之間的夾角;di代表偏置,表示相鄰公垂線之間的距離。由于設(shè)計的機械手關(guān)節(jié)類型為轉(zhuǎn)動關(guān)節(jié),且關(guān)節(jié)軸1垂直于其余3個關(guān)節(jié)軸,因此表中參數(shù)di為0。參數(shù)αi除了α1為90°外,其余都為0;θ1~4后面括號內(nèi)為各關(guān)節(jié)角度取值范圍,L1~4后面括號內(nèi)為連桿長度值。
手指相鄰連桿之間的坐標(biāo)變換關(guān)系,通過齊次坐標(biāo)變換矩陣Ai表示,如式(1)所示:
(1)
將表1中的相應(yīng)參數(shù)代入式(1)中,可得手指相鄰連桿之間的變換矩陣:
式中:A1表示連桿1相對于基坐標(biāo)系的變換矩陣;A2表示連桿2相對于連桿1的變換矩陣;A3和A4依次類推。將各個變換矩陣依次連乘,即可獲得手指指尖相對于基坐標(biāo)系的位姿矩陣,如式(2)所示:
T4=A1·A2·A3·A4=
(2)
式中:s1代表sinθ1;c1代表cosθ1;sijkl代表sin(θi+θj+θk+θl);cijkl代表cos(θi+θj+θk+θl);i,j,k,l=1,2,3,4。
式(2)中,位姿矩陣T4的左上方3×3矩陣表示手指指尖在基坐標(biāo)系中的姿態(tài),右上方3×1矩陣表示手指指尖在基坐標(biāo)系中的位置,如果已知手指指尖在空間中某點的位置坐標(biāo)點,即可進行逆運動學(xué)求解,得到所對應(yīng)的關(guān)節(jié)量,通過關(guān)節(jié)角即可控制手指運動到指定位置點。
2 織物抓取規(guī)劃的實現(xiàn)
2.1 抓取規(guī)劃設(shè)計
多指機械手是一個復(fù)雜的系統(tǒng),其抓取規(guī)劃涉及到運動學(xué)、動力學(xué)、抓取穩(wěn)定性、抓取接觸類型等各個方面[11-12]。本文設(shè)計的機械手抓取規(guī)劃總體結(jié)構(gòu)如圖2所示。傳感器將織物的物理信息、位置信息及抓取操作的任務(wù)要求分給任務(wù)分派系統(tǒng),任務(wù)分派系統(tǒng)將這些信息進行分類并分派給相應(yīng)的規(guī)劃子系統(tǒng)。位置信息傳給調(diào)整接近距離系統(tǒng);幾何信息和任務(wù)要求信息傳給抓取模式規(guī)劃系統(tǒng);所抓取織物的質(zhì)量信息將會被傳給抓取力的規(guī)劃系統(tǒng),同時此系統(tǒng)還接收到抓取點規(guī)劃的信息,通過這些系統(tǒng)的協(xié)調(diào)工作,最終實現(xiàn)對織物的自主抓取操作[13]。
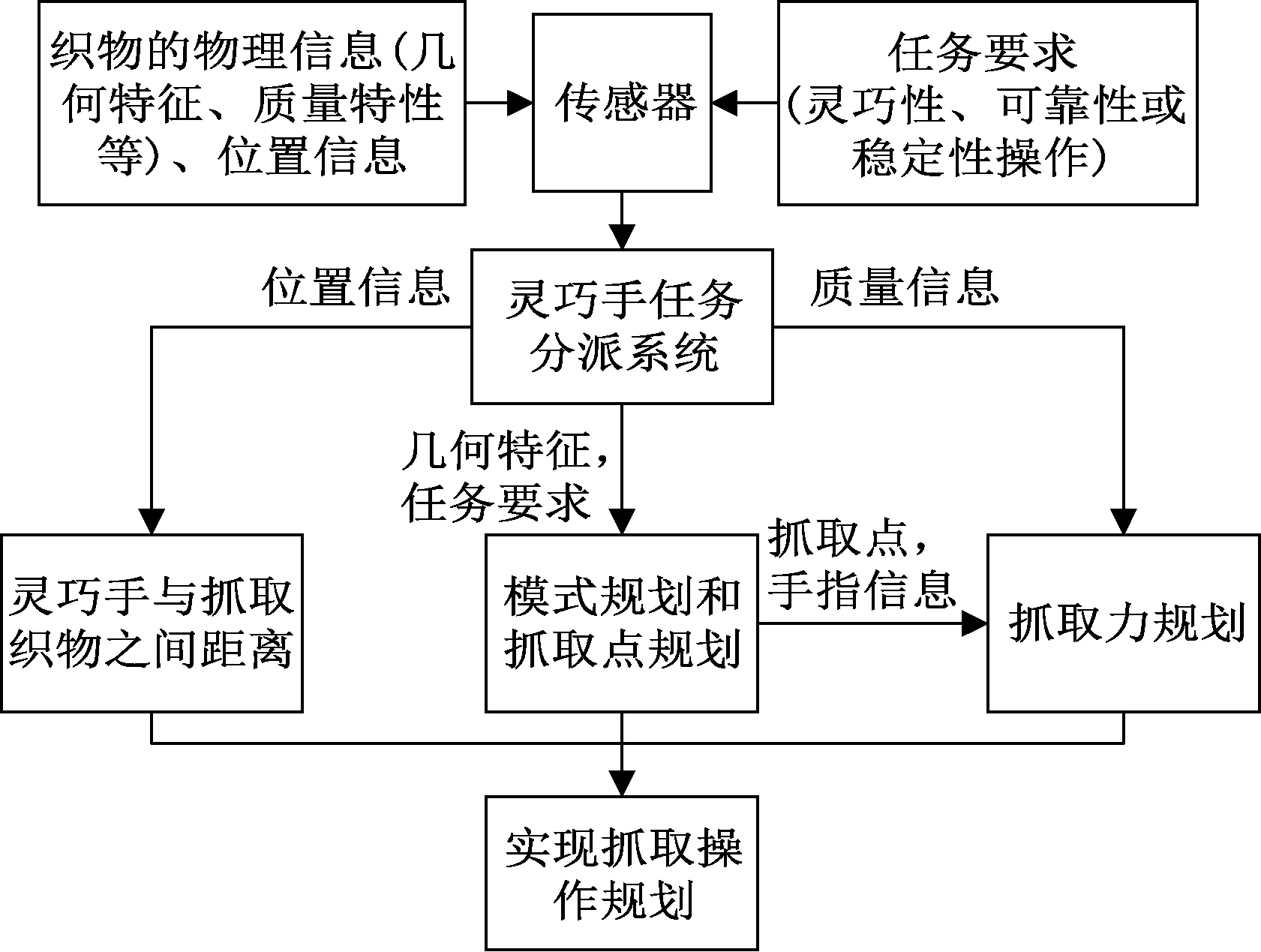
圖2 機械手抓取規(guī)劃結(jié)構(gòu)圖Fig.2 Structure chart of dexterous hand grasp planning
2.2 抓取模式規(guī)劃
對抓取規(guī)劃進行設(shè)計后將進行織物抓取規(guī)劃的具體分析,主要包括抓取模式規(guī)劃器設(shè)計、織物幾何特征描述及提取、抓取任務(wù)要求描述、抓取模式模型建立、抓取點規(guī)劃。
2.2.1 抓取模式規(guī)劃器設(shè)計
本文在研究織物抓取模式分類規(guī)劃中,著重在于如何通過識別織物的幾何特征并根據(jù)抓取任務(wù)要求建立抓取模式模型,因此,這里不考慮手指與織物之間的接觸力和織物所受外力之間的關(guān)系,只考慮織物的物理特征和抓取任務(wù)要求。通過識別織物的幾何特征并根據(jù)抓取的任務(wù)要求,建立抓取模式模型,以此來對織物進行分類,最終通過機械手實現(xiàn)對織物的抓取操作。
2.2.2 織物幾何特征描述及提取
對于柔軟織物而言,其在三維空間中有多種姿態(tài),這里先將織物分為平整和非平整2種姿態(tài),以便于描述其幾何特征,以毛巾和布片為例,其姿態(tài)示意圖如圖3所示。定義織物的空間長、寬、高分別為l、w、h,并將其作為織物的幾何特征。
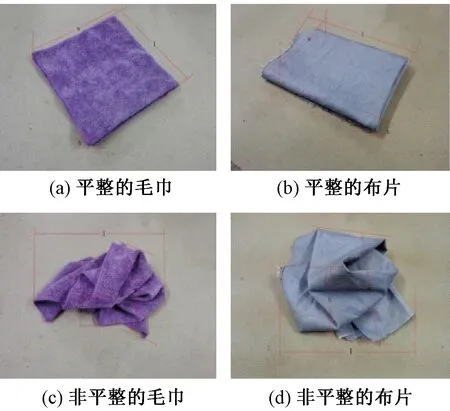
圖3 織物幾何特征Fig.3 Fabric′s geometric featurs. (a) Ordered towel; (b) Ordered fabric; (c) Unordered towel; (d) Unordered fabric
根據(jù)人手抓取物體的經(jīng)驗,抓取點一般選在比較容易抓取的地方,因此,對于平整的織物,抓取點選擇為任意一個邊角;對于不平整的織物,選取其垂直方向高度最高的一個點作為抓取點。織物抓取點的高度由傳感器獲取,并記為h,h值傳送給控制器,控制器根據(jù)所設(shè)計的機械手手指長度d與h值的大小關(guān)系,確定抓取模式。
2.2.3 抓取任務(wù)要求描述
機械手的抓取姿態(tài)包括指面抓取和指側(cè)面抓取。根據(jù)所抓取織物的特點將這2種方式均考慮進去,將織物抓取任務(wù)信息劃分為指面接觸抓取(Pinch)和包裹接觸抓取(Wrap)。指面接觸抓取操作靈活,穩(wěn)定性稍差;包裹接觸抓取穩(wěn)定性好,不利于靈巧性操作。
2.2.4 抓取模式模型建立
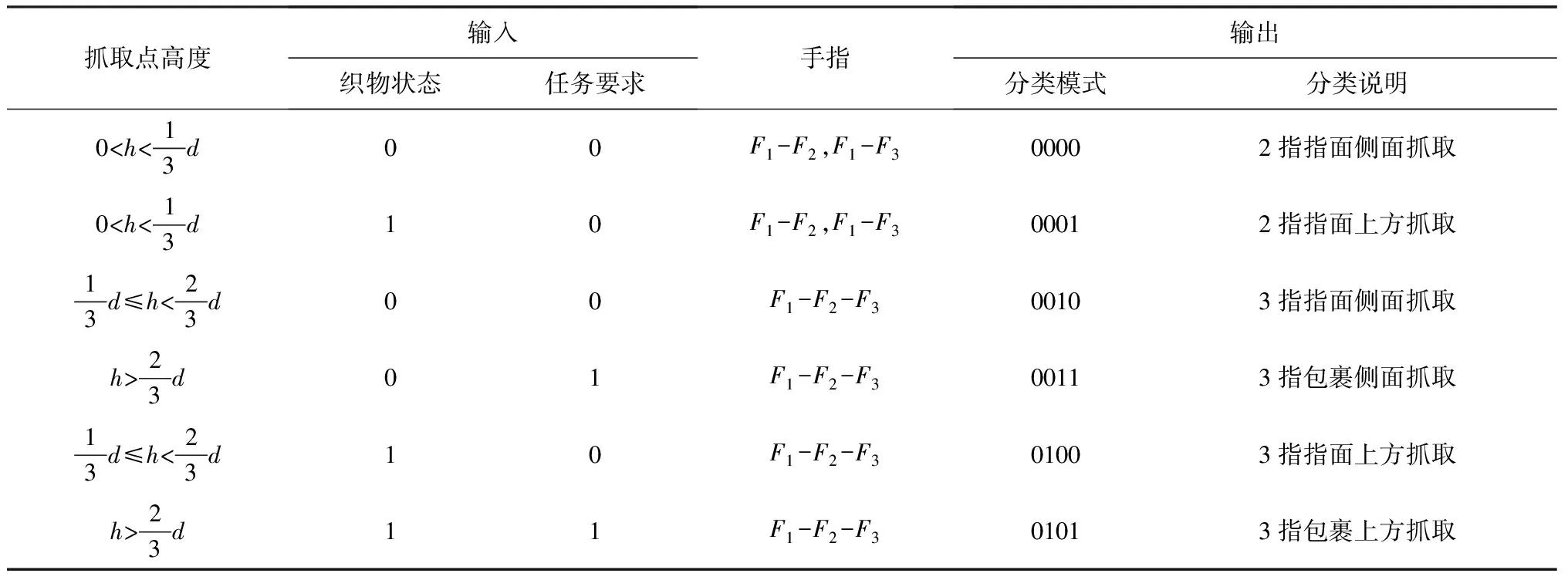
表2 織物抓取模式分類說明表Tab.2 Classification instruction of fabric grasp modes
2.2.5 抓取點規(guī)劃
所設(shè)計的機械手有2指抓取和3指抓取2種方式,要實現(xiàn)穩(wěn)定可靠的抓取,其抓取接觸點的確定原則為:若采用2指抓取,則接觸點在過質(zhì)心的一條直線上;若采用3指抓取,則各手指接觸力矢量需要在同一抓取平面上,并且手指接觸力的矢量與物體表面垂直,但由于這些點組成的是一個空間平面,為了便于研究,將三維織物抓取點規(guī)劃簡化到二維平面上,這里提出特征平面概念。
特征平面:由至少2條相交或相反的物體表面法向量構(gòu)成的平面。
通過以上定義可知,3指抓取點的位置落在特征平面的輪廓上,將輪廓分為3等份,確定每個手指抓取接觸點,其抓取點位置示意圖如圖4所示,分別表示2指抓取點和3指抓取點。
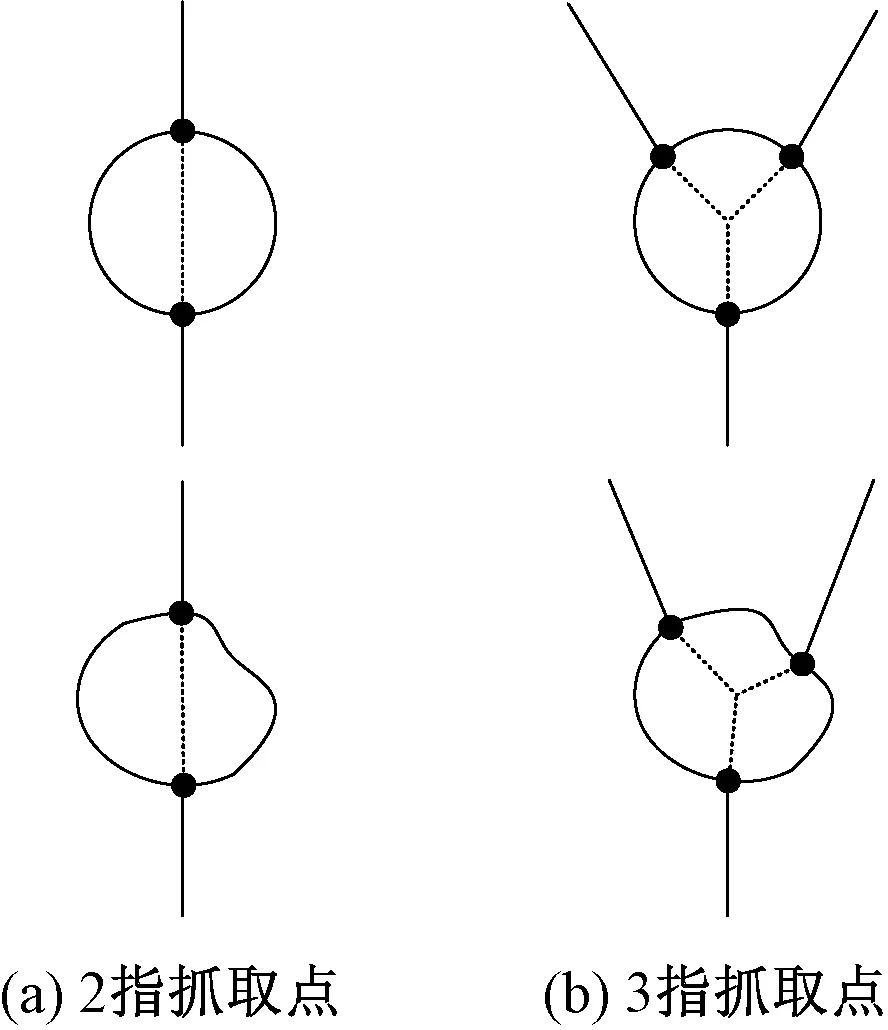
圖4 抓取點位置圖Fig.4 Location schematic of grasp point. (a) Two fingers′ grasp point; (b) Three fingers′ grasp point
3 抓取模式規(guī)劃的算法實現(xiàn)
RBF神經(jīng)網(wǎng)絡(luò)由輸入層、隱含層和輸出層組成,各層節(jié)點數(shù)分別用m,q,n表示,其結(jié)構(gòu)如圖5所示。RBF神經(jīng)網(wǎng)絡(luò)的本質(zhì)是將輸入數(shù)據(jù)從一個空間轉(zhuǎn)換到另一個空間,這個過程通過隱含層的激活函數(shù)來實現(xiàn),因此在構(gòu)建RBF神經(jīng)網(wǎng)絡(luò)進行織物抓取模式規(guī)劃時,關(guān)鍵是生成隱含層(將織物信息進行空間轉(zhuǎn)換),并確定隱含層與輸出層之間的權(quán)值ωik(將織物信息進行分類處理)。這里選用高斯函數(shù)作為隱含層的徑向基函數(shù)。
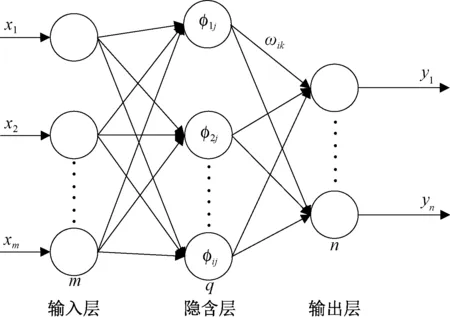
圖5 RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.5 Structure chart of RBF neural network
所選用的高斯函數(shù)表達式為
φi(x-ci)=
(3)
式中:φi為隱含層第i個單元的輸出;x為輸入矢量;ci為隱含層第i個高斯單元的中心;σi為半徑。
選擇隱含層的徑向基函數(shù)后,求解其中的參數(shù)ci和σi,這里采用K-means聚類算法計算中心ci。選擇q個初始聚類中心向量,將所有的樣本按最近的聚類中心分組,此算法的準(zhǔn)則是從聚類集中的每個樣本到聚類中心的距離平方和最小;獲得聚類中心ci后,即可計算出半徑σi:
(4)
式中,Li是屬于第i聚類的數(shù)據(jù)數(shù)。
通過上述計算,即可確定隱含層函數(shù),進而求出RBF神經(jīng)網(wǎng)絡(luò)的輸出。RBF神經(jīng)網(wǎng)絡(luò)第k個輸出節(jié)點的輸出為隱含層各節(jié)點輸出的線性加權(quán)和,計算如下:
φi(x-ci),k=1,2,…,n
(5)
式中:q為隱含層的神經(jīng)元個數(shù);ωik為隱含層i神經(jīng)元和輸出層k神經(jīng)元之間的權(quán)值;權(quán)值ωik通過神經(jīng)網(wǎng)絡(luò)的隱含層輸出和輸出層輸出來確定;函數(shù)φi(x-ci)的作用是將織物信息進行空間轉(zhuǎn)換,由權(quán)值ωik將信息進行分類處理;yk(x)表示輸出織物抓取模式規(guī)劃數(shù)據(jù)。
經(jīng)過式(5)確定了RBF神經(jīng)網(wǎng)絡(luò)的輸出,最后只需確定權(quán)值ωik即可完成RBF神經(jīng)網(wǎng)絡(luò)抓取模式規(guī)劃算法。RBF神經(jīng)網(wǎng)絡(luò)的隱含層輸出、權(quán)值和輸出層輸出之間的關(guān)系可以用矩陣表示成如下形式:
(6)
即可表示為
φ·ωik=yk(x)
(7)
式中,j為每個輸入包含部分的個數(shù)。
由式(7)可得:
ωik=φ-1·yk(x)=(φTφ)-1·yk(x)
(8)
通過式(8)即可根據(jù)現(xiàn)有數(shù)據(jù)確定隱含層和輸出層之間的權(quán)值ωik,當(dāng)給出1組新的輸入數(shù)據(jù),即可由式(5)求出所對應(yīng)的輸出。在機械手進行織物抓取時,RBF神經(jīng)網(wǎng)絡(luò)能夠快速地對環(huán)境進行學(xué)習(xí),提取織物的幾何特征并根據(jù)任務(wù)要求對抓取織物進行分類,計算機獲取其輸出的抓取模式分類數(shù)據(jù)后通過控制器控制機械手完成抓取操作。
4 抓取運動軌跡規(guī)劃
4.1 軌跡規(guī)劃方法的選擇
機械手抓取模式規(guī)劃完成后,通過計算機控制,從初始位置運動到目標(biāo)位置進行織物抓取操作,這個過程需要進行運動學(xué)軌跡規(guī)劃。為了使抓取更加合理準(zhǔn)確,本文采用關(guān)節(jié)空間和笛卡爾空間相結(jié)合的軌跡規(guī)劃方式[14]。從初始位置點到靠近位置點,對路徑?jīng)]有特殊的要求,因此,采用關(guān)節(jié)空間中的多項式軌跡規(guī)劃。從靠近位置點到接觸位置點,對路徑有要求,不僅要考慮機械手的每個手指是否同時到達目標(biāo)點,而且還要考慮抓取力的問題,因此,采用笛卡爾空間的軌跡規(guī)劃。
4.2 五次多項式規(guī)劃
五次多項式既可滿足運動過程中加速度要求,又可兼顧運行時間和使用負載,因而采用五次多項式進行關(guān)節(jié)空間中軌跡規(guī)劃。機械手各關(guān)節(jié)在起點和終點的位置、速度和加速度的約束條件為
θ(t0)=θ0;θ(td)=θd;

(9)
由式(9)約束條件可以確定一個唯一的五次多項式:
θ(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5
(10)
對式(10)求一階和二階導(dǎo)數(shù),可得:
(11)
聯(lián)立式(9)~(11),整理可得:
(12)
式(12)就是關(guān)節(jié)的軌跡函數(shù),它確定了手指運動過程中任意時刻的關(guān)節(jié)位置,通過各個關(guān)節(jié)的運動即可擬合出手指指尖的運動。由式(12)還可得到關(guān)節(jié)的速度和加速度公式,如式(14)所示,通過速度和加速度函數(shù)可反映出手指的運動情況。
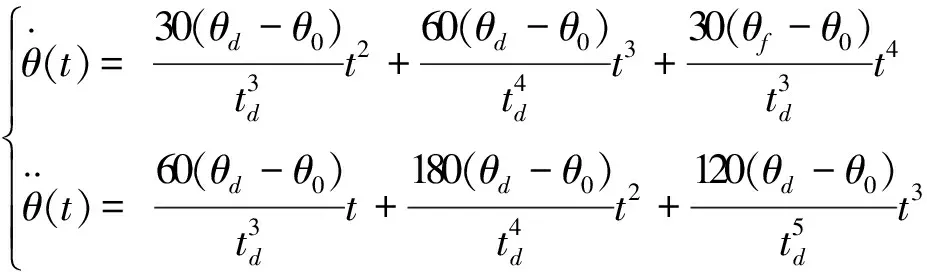
(13)
4.3 直線插補規(guī)劃
從靠近點到接觸點的軌跡規(guī)劃采用笛卡爾空間中的直線插補方法,該方法是在已知直線始末兩點位姿的前提下,求直線軌跡上各個插補點的位置和姿態(tài)。如圖6所示,設(shè)始末兩點位姿分別為P1、P2。
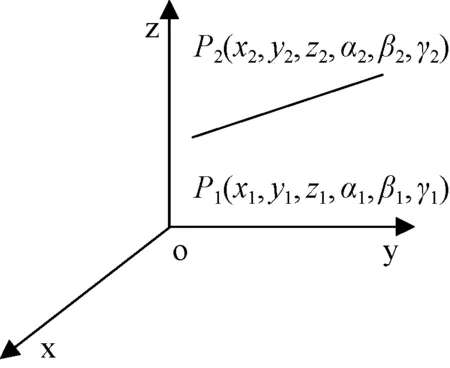
圖6 空間直線插補Fig.6 Space linear interpolation
插補點的位置和姿態(tài)坐標(biāo)點的值求解如下:
(14)
式中:(x1,y1,z1)、(α1,β1,γ1)分別為起始點的位置和姿態(tài)角;(x,y,z)、(α,β,γ)分別為插補點的位置和姿態(tài)角;λ為歸一化因子;(△x,△y,△z,△α,△β,△γ)為位置和姿態(tài)角的增量,其求解如下:
(15)
式中,(x2,y2,z2)、(α2,β2,γ2)分別為接觸點的位置和姿態(tài)角。
λ主要采用拋物線過渡的線性函數(shù),這樣能夠保證整條軌跡上的位移和速度都連續(xù)。求出λ后即可確定插值點,設(shè)拋物線過渡的線性函數(shù)的直線段速度為ν,拋物線段的加速度為A。則拋物線段的運動時間Tb和位移Lb分別為
(16)
(17)
直線的長度L和運動的時間T分別為
(18)
(19)
拋物線段位移、時間、加速度分別歸一化處理:
(20)
則可得出λ的計算公式:
(21)
5 仿真實驗
利用MatLab/Robotics Toolbox中提供的機器人函數(shù)進行機械手織物抓取規(guī)劃建模仿真。首先結(jié)合前面機械手的結(jié)構(gòu)設(shè)計和運動學(xué)分析,建立機械手的空間三維結(jié)構(gòu)模型。設(shè)3個手指的初始點關(guān)節(jié)量分別為q1=[0.523 6000]、q2=[2.6170000]、q3=[-π/2000],通過調(diào)用函數(shù)編程,即可建立三指機械手初始點位置的空間三維模型,如圖7所示。
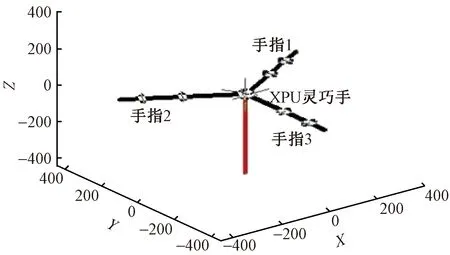
圖7 機械手初始點位置三維模型Fig.7 3 D model of dexterous hand’s initial point location
建立機械手的三維模型后,根據(jù)前面的抓取規(guī)劃要求和運動軌跡規(guī)劃,即可實現(xiàn)機械手的抓取操作運動過程仿真,如圖8所示。其中點M1、M2、M3分別為3個手指的初始位置點,對應(yīng)于圖7所示位置,點P為接觸點,N1、N2、N3分別為各手指靠近點位置,從點M到點N的紅綠藍3條曲線M1N1、M2N2、M3N3分別為手指1、手指2、手指3在關(guān)節(jié)空間中五次多項式規(guī)劃的運動軌跡,從點N到點P的3條洋紅色直線N1P、N2P、N3P分別為手指1、手指2、手指3在笛卡爾空間中直線規(guī)劃的運動軌跡,從圖中可看出各手指軌跡達到了預(yù)期的要求,但這些還不能說明設(shè)計的機械手就是穩(wěn)定可靠的。由于機械手在抓取的過程中,不僅要保證每個手指在指定的工作空間范圍內(nèi)運動,而且還要保證每個手指都能夠同時到達目標(biāo)點,滿足作用力要求,因此,需要對其操作空間和指尖位移進行仿真分析。
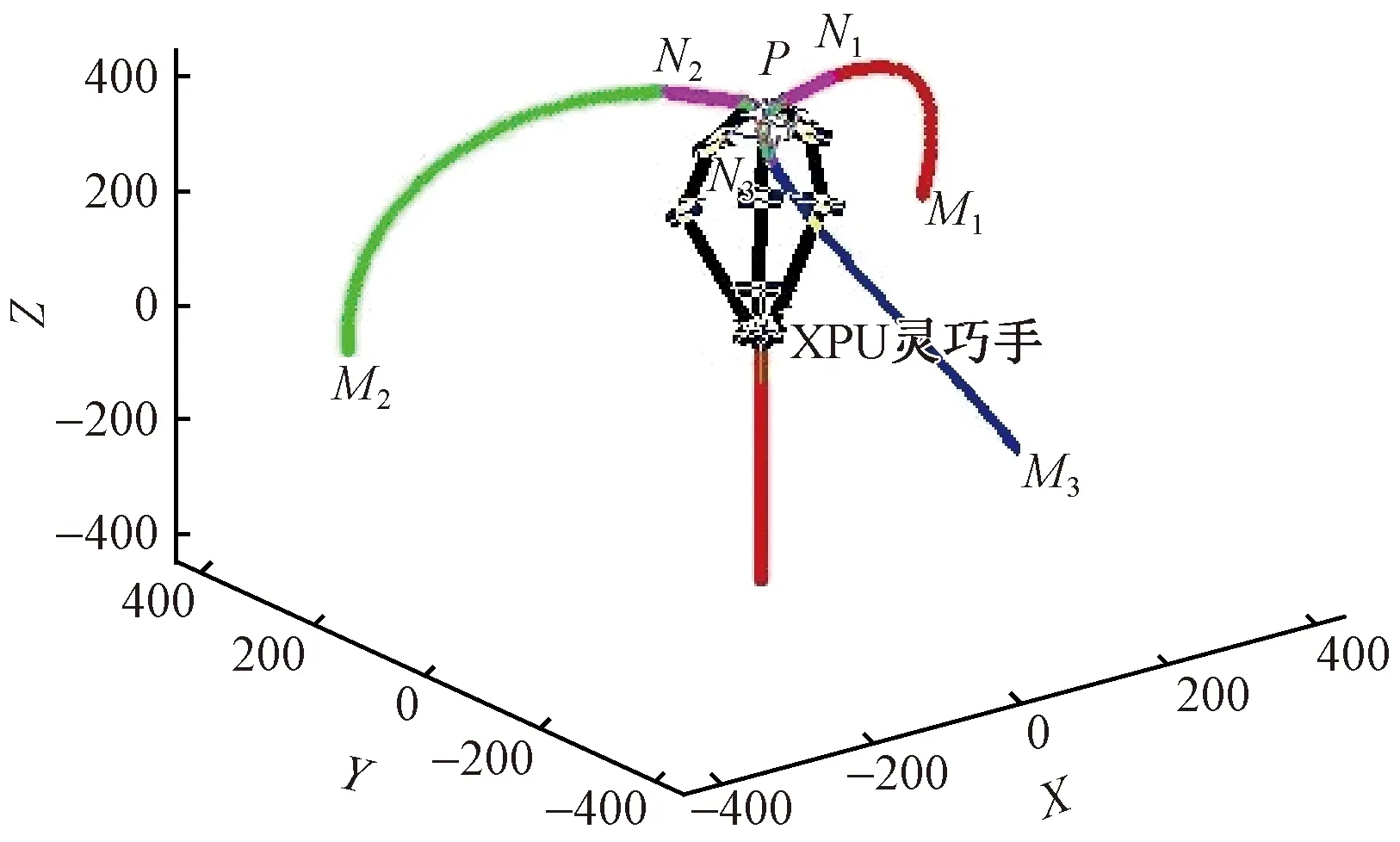
圖8 靈巧手抓取運動規(guī)劃圖Fig.8 Planning chart of dexterous hand grasp movement
圖9示出手指的三維工作空間示意圖。紅色部分表示手指的工作區(qū)域,在這個工作空間范圍內(nèi)手指能到達任意一點。
圖10示出各手指指尖點位移圖。可以看到各手指運動正常,沒有發(fā)生錯位突變的情況,表明織物抓取過程穩(wěn)定可靠。
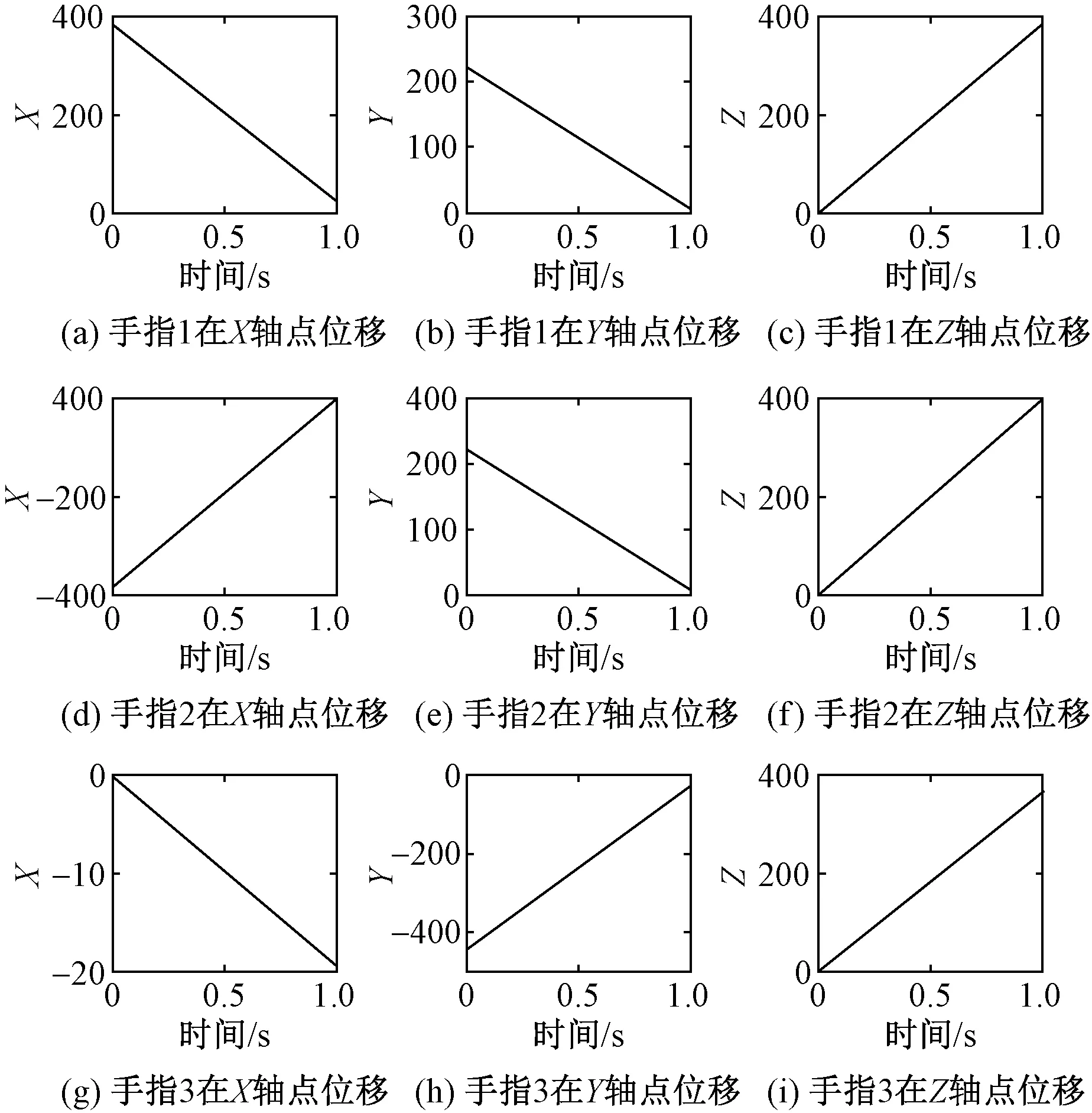
圖10 手指指尖點位移圖Fig.10 Drawing of fingers′ point displacement. (a) Finger 1 in X-axis point displacement; (b) Finger 1 in Y-axis point displacement; (c) Finger 1 in Z-axis point displacement; (d) Finger 2 in X-axis point displacement; (e) Finger 2 in Y-axis point displacement; (f) Finger 2 in Z-axis point displacement; (g) Finger 3 in X-axis point displacement; (h) Finger 3 in Y-axis point displacement; (i) Finger 3 in Z-axis point displacement
6 結(jié) 語
本文針對紡織服裝行業(yè)織物抓取問題進行研究,設(shè)計了3指機械手并進行了運動學(xué)分析,然后根據(jù)織物的幾何特征和抓取任務(wù)要求,選取以高斯函數(shù)作為徑向基函數(shù)的RBF神經(jīng)網(wǎng)絡(luò)方法對其進行抓取模式規(guī)劃,并采用關(guān)節(jié)空間和笛卡爾空間混合的方式進行運動軌跡規(guī)劃,最后通過仿真實驗進行驗證。結(jié)果表明,多指機械手結(jié)構(gòu)設(shè)計合理,關(guān)節(jié)參數(shù)設(shè)置滿足抓取要求,織物抓取規(guī)劃方法準(zhǔn)確可靠。本文研究為多指機械手織物抓取研究分析,以及在紡織服裝行業(yè)織物抓取操作的應(yīng)用提供了理論依據(jù)。FZXB
[1] 高利斌,郭冰菁,王凱.仿人機械手的結(jié)構(gòu)設(shè)計與單指的控制策略[J].液壓與氣動, 2012(2): 11-14. GAO Libin, GUO Bingjing, WANG Kai. Dexterous robot fingers structural design and single-finger control stategy[J]. Chinese Hydraulics and Pneumatics, 2012(2):11-14.
[2] 張延恒,贠超,孫漢旭,等.對稱結(jié)構(gòu)三指機械手抓持規(guī)劃[J].機床與液壓, 2007, 35(9): 76-78. ZHANG Yanheng, YUN Chao, SUN Hanxu,et al. Grasp planning for three fingered hands with symmetrical configuration[J]. Machine Tool and Hydraulics, 2007,35(9):76-78.
[3] 楊永.用于采摘機器人的空間定位方法及試驗[J].制造業(yè)自動化, 2014(23): 49-52. YANG Yong. The space locating method and experiments for picking robot[J]. Manufacturing Automation, 2014(23):49-52.
[4] 陳兆芃,金明河,樊紹巍,等.面向任務(wù)的機器人機械手控制系統(tǒng)及多指空間協(xié)調(diào)阻抗控制[J].哈爾濱工程大學(xué)學(xué)報, 2012, 33(4): 476-484. CHEN Zhaopeng, JIN Minghe, FAN Shaowei, et al. The task-oriented control system of a dexterous robot hand with a multi-fingered spatial coordinating impedance control[J]. Journal of Harbin Engineering University, 2012,33(4):476-484.
[5] 張敏,王鴻博,高衛(wèi)東,等.噴氣織機車速對織物緯向物理力學(xué)性能的影響[J].紡織學(xué)報, 2016, 37(8): 41-46. ZHANG Min, WANG Hongbo, GAO Weidong,et al. Influence of air-jet loom speed on weft physical and mechanical properties of fabrics[J]. Journal of Textile Research, 2016,37(8):41-46.
[6] 田景山,王文敏,王聰,等.機械采收方式對新疆棉品質(zhì)的影響[J].紡織學(xué)報, 2016, 37(7): 13-17. TIAN Jingshan, WANG Wenmin, WANG Cong,et al. Effect of cotton mechanical picking on fiber qualities in Xinjiang[J]. Journal of Textile Research, 2016,37(7):13-17.
[7] 張昭昭,喬俊飛.基于在線減法聚類的RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計[J].控制與決策, 2012, 27(7): 997-1002. ZHANG Zhaozhao, QIAO Junfei. Design RBF neural network architecture based on online subtractive clustering[J]. Control and Decision, 2012,27(7):997-1002.
[8] 姜瑩礁,趙懷勛,賈琪,等.基于聚類RBF神經(jīng)網(wǎng)絡(luò)的人體行為識別[J].計算機應(yīng)用與軟件, 2013, 30(2): 47-49. JIANG Yingjiao, ZHAO Huaixun, JIA Qi, et al. Human behavior recognition using clustering method and RBF neural metwork[J]. Computer Applications and Software, 2013,30(2):47-49.
[9] 趙雪.機織物接縫強力測量的不確定度分析[J].紡織學(xué)報, 2015, 36(10): 49-53. ZHAO Xue. Discussion on uncertainty in seam strength measurement of woven fabric[J]. Journal of Textile Research, 2015,36(10):49-53.
[10] 趙立環(huán),張杰.織物折皺回復(fù)角與其力學(xué)性能指標(biāo)間的關(guān)系[J].紡織學(xué)報, 2013, 34(10): 39-42. ZHAO Lihuan, ZHANG Jie. Relationship between fabric′s wrinkle recovery angle and its mechanical properties[J]. Journal of Textile Research, 2013, 34(10):39-42.
[11] LIN G D, LI Z J, LIU L, et al. Development of multi-fingered dexterous hand for grasping manipulation[J]. Sciece China Information Sciences, 2014,57(12):1-10.
[12] WANG Z H, ZHANG L B, BAO G J, et al. Design and control of integrated pneumatic dexterous robot finger[J]. Journal of Central South University of Technology, 2011,18(4):1105-1114.
[13] 陸志遠,甘亞輝,戴先中,等.基于似人特性的擬人臂機器人自主抓取動作規(guī)劃[J].機器人, 2014, 36(6): 719-729. LU Zhiyuan, GAN Yahui, DAI Xianzhong, et al. Autonomous grasp motion planning for an anthropomorphic robot arm based on human like-ness[J]. Robot, 2014,36(6):719-729.
[14] 郭超,辛世界,李玉勝.兩種坐標(biāo)空間中Delta機器人軌跡規(guī)劃仿真[J].制造業(yè)自動化, 2014(4): 49-51. GUO Chao, XIN Shijie, LI Yusheng. Simulation of Delta robot trajectory planning in two kings of coordinate space[J]. Manufacturing Automation, 2014(4):49-51.
Fabric grasp planning for multi-fingered dexterous hand based on neural network algorithm
ZHANG Lei, WEI Pandong, LI Pengfei, WANG Xiaohua, LIU Xiuping
(SchoolofElectronicsandInformation,Xi′anPolytechnicUniversity,Xi′an,Shaanxi710048,China)
For fabric autonomous grasp of textile and garment industry, low production efficiency will be caused by manual operation. Fabric is grasped by dexterous hand in this paper. Firstly, multi-fingered dexterous hand was designed and a method of kinematics analysis was used by describing coordinates transformation relation of fingers′ connecting rod. Grasp mode planning was programmed by using Radial Basis Function (RBF) neural network method. By identifying the fabric′s geometric feature and according to the requirements of the grasp tasks autonomous grasp is realized. In the process of grasp movement, the joint space trajectory planning and Cartesian space trajectory planning were combined to ensure the dexterous hand fingers can stably and accurately reach to the grasp point. Finally, multi-fingered dexterous hand and grasp planning were simulated by using MatLab/Robotics Toolbox, and the simulation results show that the design of the dexterous hand joint parameters setting is reasonable, and fabric grasp planning meets the requirements.
multi-fingered dexterous hand; grasp mode planning; RBF neural network; trajectory planning; fabric grasp
10.13475/j.fzxb.20160105008
2016-01-22
2016-09-02
陜西省教育廳科研計劃項目資助項目(14JK1306);陜西省科技計劃項目(2016GY-136);西安工程大學(xué)學(xué)科建設(shè)經(jīng)費資助項目(107090811)
張蕾(1981—),女,講師,博士。研究方向為機器人運動控制、非線性控制理論分析。E-mail:11795503@qq.com。
TP 241; TS 103.8
A
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
