基于機器魚的內(nèi)陸湖泊水質(zhì)在線監(jiān)測系統(tǒng)設計
2017-05-24 14:45:32童曉紅
計算機測量與控制 2017年5期
童曉紅,陳 玲,華 艷,楊 磊
(1.合肥職業(yè)技術學院 信息中心,合肥 238000;2.安徽斯瑪特物聯(lián)網(wǎng)科技有限公司,合肥 231000)
基于機器魚的內(nèi)陸湖泊水質(zhì)在線監(jiān)測系統(tǒng)設計
童曉紅1,陳 玲1,華 艷1,楊 磊2
(1.合肥職業(yè)技術學院 信息中心,合肥 238000;2.安徽斯瑪特物聯(lián)網(wǎng)科技有限公司,合肥 231000)
僅依賴無線傳感器網(wǎng)絡在線實測是利用多跳式通信實現(xiàn)遠程發(fā)送與存儲數(shù)據(jù)丟包率高,實驗階段設計的二維結構仿真機器魚巡游避障性能差,GPRS全天候數(shù)據(jù)采集與傳送所需的流量費用高,針對以上這些問題,設計了一套可進行實測的機器魚自動巡游避障、水質(zhì)環(huán)境實時監(jiān)測系統(tǒng)平臺;該系統(tǒng)通過移動終端程序設計、利用三維采集路徑跟蹤算法及WSNs與Wifi熱點技術對機器魚群實現(xiàn)遠程精準控制,按照設定深度、路徑規(guī)劃的采集點進行水溫水位、PH值、溶解氧、電導率、濁度等常五類水質(zhì)環(huán)境數(shù)據(jù)實時采集、處理、遠程存儲、顯示、分析及預警,給出了系統(tǒng)的總體設計、機器魚的結構與控制系統(tǒng)設計、終端節(jié)點與協(xié)調(diào)器的硬件系統(tǒng)及上下位機軟件系統(tǒng)設計;利用這套系統(tǒng)對巢湖5個取樣點實測,水溫、溶解氧、PH值平均誤差率分別為0.18%、0.5%及0.01%,遠高于其他水質(zhì)在線監(jiān)測的精度要求,達到了預期成果;同時對水庫及精細水產(chǎn)養(yǎng)殖業(yè)等水質(zhì)在線監(jiān)測與預警具有很高的推廣價值。
WSNs;WiFi;機器魚;內(nèi)陸湖泊;水質(zhì)在線監(jiān)測;系統(tǒng)設計
0 引言
內(nèi)陸湖泊一般位于人口與產(chǎn)業(yè)聚集區(qū),是區(qū)內(nèi)珍貴的水源地,資源短缺。因此對水質(zhì)進行監(jiān)測特別是實時監(jiān)測顯得非常重要,一旦出現(xiàn)突發(fā)性問題需及時報警并采取相應措施。傳統(tǒng)的基于國家級的基站多參數(shù)水質(zhì)檢測儀無法實現(xiàn)全天候?qū)崟r監(jiān)測,過去的485現(xiàn)場總線模式不適合移動多點監(jiān)測。王士明等人研究設計的基于ZigBee的大水域水質(zhì)環(huán)境監(jiān)測系統(tǒng)僅依靠ZigBee網(wǎng)絡進行遠程多跳式通信,數(shù)據(jù)發(fā)送與存儲丟包率高[1],且構建大范圍無線傳感器網(wǎng)絡的算法復雜,節(jié)點布局難;付煥森等人研究設計的基于ZigBee和GPRS的仿真機器魚水質(zhì)監(jiān)測系統(tǒng)設計[2]雖然引入機器魚巡游系統(tǒng),但二維結構設計的機器魚巡游避障性能差,利用GPRS模塊對數(shù)據(jù)收集、傳輸、存儲其穩(wěn)定性不夠、全天候數(shù)據(jù)采集與傳送所需的流量費用也非常昂貴。
本文綜合上述思路,研發(fā)設計的機器魚能按照規(guī)劃的三維采集路徑算法實現(xiàn)精準的巡游避障;攜帶多種傳感器艙體及浮標球氣泵設計使機器魚用途更廣、維護更便利;機器魚嵌入的網(wǎng)關節(jié)點的WiFi模塊,利用智慧城市免費的wifi熱點連接把基于WSNs集成的多傳感器各節(jié)點數(shù)據(jù)及時穩(wěn)定地發(fā)送到遠程數(shù)據(jù)庫服務器,通過設計的平臺就可以實現(xiàn)對水質(zhì)實時數(shù)據(jù)監(jiān)測、分析與預警。利用該系統(tǒng)對巢湖選定的具有代表性的污染源入口多次實測,并通過與精密水質(zhì)分析儀現(xiàn)場測定數(shù)據(jù)比對、算法校正,基本實現(xiàn)了預定的水質(zhì)在線監(jiān)測目標。這套系統(tǒng)實施成本低,可操作性便利,目前與企業(yè)合作,除內(nèi)陸湖泊外,在大范圍的飲用型水庫、精細水產(chǎn)養(yǎng)殖業(yè)等水質(zhì)監(jiān)測得到廣泛的推廣應用。
1 系統(tǒng)總體設計
系統(tǒng)的網(wǎng)絡結構的設計包括監(jiān)測中心、通信基站、網(wǎng)關、傳感器節(jié)點等。其分層結構是由物理鏈路感知層、網(wǎng)絡數(shù)據(jù)傳輸層、數(shù)據(jù)分析處理應用層組成[3],如圖1所示。物理鏈路感知層主要由機器魚載體及其內(nèi)嵌的常五類傳感器、RS232-485模塊、數(shù)據(jù)采集器組成;網(wǎng)絡數(shù)據(jù)傳輸層是由協(xié)調(diào)器及網(wǎng)關節(jié)點、Wifi通信模塊、無線路由等組成,對傳感器采集的數(shù)據(jù)以加密包的形式向上位機進行數(shù)據(jù)分割、傳送,并通過Web Service接口,利用網(wǎng)關節(jié)點的負載均衡與存儲管理實時存放到對應的數(shù)據(jù)表內(nèi);數(shù)據(jù)分析處理應用層是利用算法、.NET框架設計出Web系統(tǒng)平臺供遠程用戶登錄、實現(xiàn)查詢、控制及預警;移動終端(手機)移植并安裝機器魚控制系統(tǒng)可實現(xiàn)對機器魚節(jié)點定位巡游,同時也可以利用手機的APP系統(tǒng)對水質(zhì)實時查詢。在數(shù)據(jù)傳輸方法上規(guī)避了總線傳輸受限固定節(jié)點、GPRS實時遠程傳送帶寬低、丟包率高、全天候費用昂貴等缺陷,讓機器魚節(jié)點間采用WSNs技術組網(wǎng),網(wǎng)關協(xié)調(diào)器增加WiFi模塊,加上近年來免費的Wifi熱點覆蓋率及帶寬呈幾何級數(shù)遞增、無縫漫游技術日趨成熟為機器魚遠程巡游、多點采集與數(shù)據(jù)實時傳輸提供了保障,基于wifi模塊與熱點技術是本系統(tǒng)在設計上區(qū)別于國內(nèi)外其他系統(tǒng)的一個顯著特點。

圖1 系統(tǒng)結構圖
2 機器魚的結構與控制系統(tǒng)設計
2.1 機器魚結構設計
近年來,國內(nèi)外許多研究機構和高等院校對機器魚進行了大量的研究,并且在各個領域中得到了實際運用。英國埃塞克斯大學的研究人員向泰晤士河投放專門設計的機器魚,用于探測水中的污染物,并繪制河水的3D污染圖;日本三菱重工也已經(jīng)將研究的機器魚玩具批量生產(chǎn);中國北京航空航天大學和中國科學院研制的SPC-II機器魚也成功地用于水下考古探測。目前國內(nèi)外研究機構研制的機器魚的結構不盡相同,但基本都是通過模仿和控制魚鰭的運動來達到運動目的[4],到達設定目標完成設定任務后返航或巡游進入下一個測量點。考慮到湖泊水體水質(zhì)采集點對機器魚適用性及控制性的要求,在機器魚的設計上結合國內(nèi)外機器魚的特點,設計出適應于內(nèi)陸湖泊水質(zhì)監(jiān)測的機器魚結構模型。如圖2所示。

圖2 機器魚結構
其內(nèi)部結構可分解為視頻模塊、導航模塊、任務調(diào)度模塊、運動控制模塊、通信模塊、電源模塊和鰭部運動模塊等。視頻模塊設計放在頭部,主要對水下環(huán)境進行攝像處理;導航模塊可利用GPS定位及數(shù)字地圖規(guī)劃路徑,配合伺服電機驅(qū)動螺旋槳、及運動控制模塊實現(xiàn)自主巡游;任務調(diào)度模塊除了協(xié)調(diào)機器魚的各個模塊之間作業(yè),主要是完成多參數(shù)水質(zhì)環(huán)境的傳感器數(shù)據(jù)采集、存儲與傳送;通信模塊是實現(xiàn)機器魚與上位機、服務器、數(shù)據(jù)庫存儲系統(tǒng)之間信息交互;電源模塊包含蓄電池組、逆變器、控制器、串口服務器及供電模塊;鰭部除了常備的尾鰭外,為了巡游與避障考慮,特別增加了左右腹鰭及背鰭部分,真正實現(xiàn)三維結構的路徑設計。各鰭部模塊包括鰭關節(jié)電機、傳動機構、鰭翼、水箱及水箱泵組成,其中尾鰭擺動或波動是機器魚的主要巡游工具,潛水控制模塊、水箱及氣泵除協(xié)助背鰭、左右腹鰭上浮、下潛及左右轉(zhuǎn)向外,可實現(xiàn)排空水箱后使機器魚升至水面以便維護與維修。
2.2 巡游避障系統(tǒng)與算法設計
巡游避障系統(tǒng)是通過紅外線漫反射式避障傳感器(即紅外傳感器)實現(xiàn)的。這種傳感器是由紅外接收管和發(fā)射管、發(fā)射和接收處理電路組成。電路設計時考慮有障礙物時,接收電路端口輸出高電平,無障礙時則輸出低電平。通過高低電平來識別是否有障礙物[5]。考慮到機器魚在水中光衰減明顯使得距離分辨率低,因此除在常設的魚眼及嘴部外,在背鰭、左右腹鰭增加紅外傳感器,確保巡游過程中的避障與快速逃逸能力。其三維空間節(jié)點分布如圖3所示。由于增加多點空間布局,參考離散域蟻群算法[6],利用空間等分網(wǎng)格方法[7],將機器魚避障傳感器節(jié)點設計如下:

圖3 傳感器節(jié)點分布
假設6個傳感器的信號向量為Smi(左腹鰭)、Smr(右腹鰭)、Smf(嘴)、Smb(背鰭)、Smif(左眼)及Smrf(右眼),垂直三層分布,嘴、左右腹鰭為水平底層,左右眼為中間層(為方便計算,設定與水平底面及垂直剖面夾角都為β等于450),背鰭為頂層。機器魚實時運動的線速度為υ,電子羅盤N的偏角為θ,各傳感器與所對的實時運動軌跡相對分辨率為αi,αr,αf,αb,αif,αrf,設定αi=αif,αf=αb,αr=αrf,定義機器魚在單位時刻t的碰撞函數(shù)[8]為Riskt,利用路徑優(yōu)化搜索算法[9]得到:
Riskt=-(Smi,t·αi,t+Smr,t·αr,t+Smf,t·αf,t+Smb,t·αb,t+
Smif,t·αif,t+Smrf,t·αrf,t)=
-[(Smi,t+Smif,t)·(90°-θt)+Smr,t+Smrf,t·
(90°+θt)+(Smf,t+Smb,t)·|θt|]
(1)
如果Riskt值越小,機器魚碰撞可能性越小。巡游與障礙、傳感器信號向量、Riskt值相對應,設巡游規(guī)則線性集合為φAction,巡游實時指令為Actiont,依據(jù)三維空間路徑規(guī)劃算法[10]得出:
φAction={Action|υ{υt},θ{θt},α{αl,t,αr,t,αf,t,
αb,t,αlf,t,αrf,t}}
(2)
minActiontεφAction{Riskt}=minActiontεφAction[(Sml,t+Smlf,t)·
(90°-θt)+(Smr,t+Smrf,t)·(90°+θt)+(Smf,t+Smb,t·
|θt|)]
(3)

表1 巡游避障線性集定義
3 系統(tǒng)硬件設計
集成了多傳感器的機器魚構成了WSNs的終端節(jié)點群,終端節(jié)點群通過CC2530的RF射頻模塊與網(wǎng)絡協(xié)調(diào)器通信,嵌入WiFi模塊的網(wǎng)絡協(xié)調(diào)器(已設計成機器魚)是構成ZigBee網(wǎng)絡的網(wǎng)關或路由節(jié)點,當終端節(jié)點群正常加入到自組建ZigBee網(wǎng)絡后,便開始把多參數(shù)傳感器數(shù)據(jù)幀發(fā)送到路由節(jié)點上,路由節(jié)點接收數(shù)據(jù)是通過OSAL操作系統(tǒng)機制將數(shù)據(jù)封裝成一個消息,然后放入消息隊列中。嵌入WiFi模塊的網(wǎng)關從消息隊列中取得所需要的數(shù)據(jù),利用WiFi模塊獲得Web服務器遠程IP地址的高端端口,并發(fā)送到數(shù)據(jù)庫服務器對應的表中,其他工作全部交給ZigBee協(xié)議棧自動完成,從而實現(xiàn)了多傳感器數(shù)據(jù)的自動采集與上傳[12]。
3.1 終端節(jié)點(EndDevice)的設計
終端節(jié)點設備安裝在機器魚的頭部及胸腔部位,包括避障、水質(zhì)采樣與控制模塊(傳感器、采集模塊、模數(shù)轉(zhuǎn)換設備、繼電器、總線模塊、通訊轉(zhuǎn)換器)、電源模塊、通信與定位導航模塊、支持RF射頻的主控模塊及電路等。
傳感器采集的信號首先要進行信號放大電路及多路信號抗干擾電路處理,模擬量是通過多通道采集模塊(16路4~20 mA直流信號)利用RS485接口連接通訊轉(zhuǎn)換器轉(zhuǎn)RS232接入片上系統(tǒng)(SoC)CC2530對應的信號I/O引腳,開關量采集的傳感器信號量主要用來控制機器魚輸出信號與接收指令,所不同的是采用多通道的數(shù)字開關量采集模塊。
3.2 協(xié)調(diào)器(Coordinator)的設計
由終端節(jié)點與協(xié)調(diào)器組成的機器魚群是利用ZigBee協(xié)議自組建網(wǎng)絡的,協(xié)調(diào)器利用WiFi通信模塊把數(shù)據(jù)發(fā)送到上位機數(shù)據(jù)庫服務器上,并能夠接收上位機通訊指令控制機器魚群避障巡游。協(xié)調(diào)器作為魚群一員除具有普通機器魚結構外,另外增加WiFi通信模塊及熱點自動漫游切換功能以實現(xiàn)數(shù)據(jù)的遠程全天候無線傳輸[13]。在設計信道傳輸數(shù)據(jù)時,是把數(shù)字量模塊和模擬量模塊采集到的數(shù)據(jù)進行封裝組成一個數(shù)據(jù)包,考慮到現(xiàn)場采集信號過程的干擾與冗余,需要進行信號放大、抗擾及算法加密,通過通信模塊并輔以采集點GPS定位導航模塊發(fā)送到數(shù)據(jù)處理中心。協(xié)調(diào)器的結構設計如圖4所示[14-15]。

圖4 協(xié)調(diào)器結構設計
4 系統(tǒng)軟件設計
4.1 下位機機器魚巡游控制系統(tǒng)設計與WSNs魚群流程設計
本系統(tǒng)首先設計出所有機器魚巡游控制,使之能到達設計路徑指定地點,并通過ZigBee網(wǎng)絡,使處于協(xié)調(diào)器與終端節(jié)點狀態(tài)下的各機器魚自組構建機器魚群網(wǎng)絡,并在TOP圖上能夠顯示所有機器魚的正常連接狀態(tài)。其設計流程[16]如圖5所示。

圖5 組網(wǎng)流程圖
下位機終端巡游控制與顯示系統(tǒng)是利用安卓程序設計,實現(xiàn)手動控制機器魚的運動軌跡,并能屏顯水質(zhì)傳感器的實時數(shù)據(jù),其基本設計流程[17-18]如圖6所示。
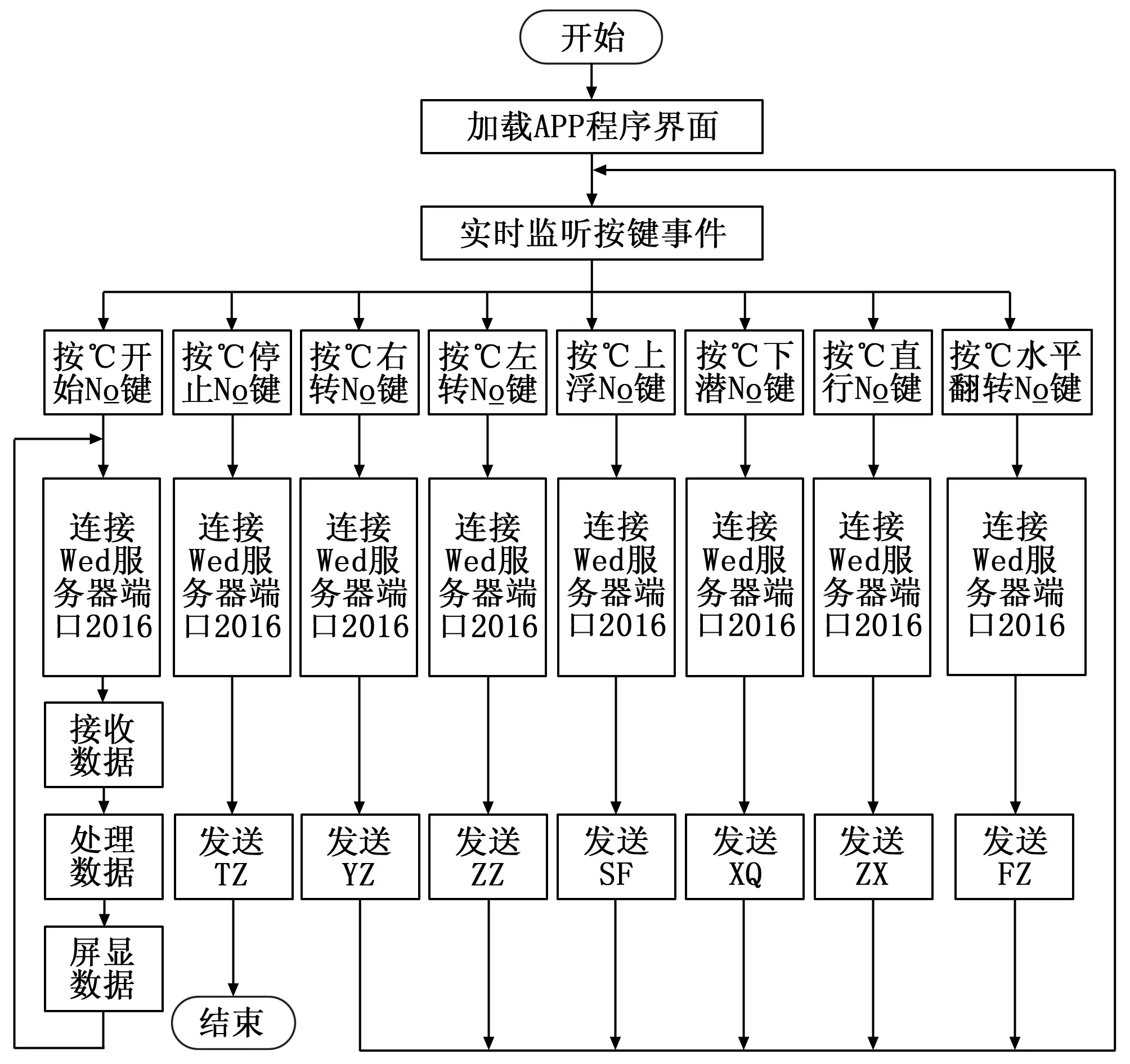
圖6 Android程序流程圖
Android 客戶端的開發(fā)工具為Eclipse,開發(fā)環(huán)境為其內(nèi)嵌的AndroidSDK及JDK容器。其編程方法首先通過自主知識產(chǎn)權的中間件技術(專利號ZL201521063155.6)讓終端機器魚節(jié)點通過協(xié)調(diào)器注冊并允許自組建ZigBee網(wǎng)絡,然后設計出監(jiān)測界面線性布局,最后在主程序文件中按照設計流程進行程序設計,程序運行的客戶端界面如圖7所示。這里的啟動按鈕是開始接收傳感器實時數(shù)據(jù)信息,并在對應的控件上顯示數(shù)值,停止按鈕是中止數(shù)據(jù)采集使機器魚巡游進入下一測定地點,其它按鈕為控制機器魚的巡游軌跡[19-20]。

圖7 Android客戶端程序界面
4.2 上位機數(shù)據(jù)庫系統(tǒng)設計及過程實現(xiàn)
遠程數(shù)據(jù)處理中心數(shù)據(jù)庫管理系統(tǒng)選擇MSSQL2008R2并開放上位機外網(wǎng)IP地址的14333端口使之可以遠程數(shù)據(jù)連接與服務,設計過程如下。
4.2.1 數(shù)據(jù)庫的創(chuàng)建
創(chuàng)建datainfo(上傳傳感器原始數(shù)據(jù)并處理)及device(包括傳感器在內(nèi)的所有系統(tǒng)設備管理)數(shù)據(jù)庫并附加到SQL Server2008中。
4.2.2 數(shù)據(jù)表的設計
dbo.DataInfo表結構包括ID、Code、DeviceID、OriginalData、ProcessData、WriteTime、IsValid、Upload及備注等字段名,通過網(wǎng)關中間件上傳獲取的實時記錄如圖8所示。
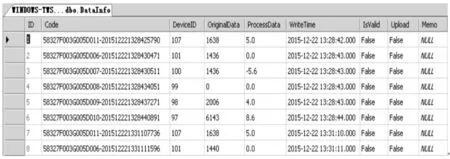
圖8 datainfo數(shù)據(jù)表結構及記錄
Dbo.Device數(shù)據(jù)表結構包括ID、Code、Name、WsnNodesID、SensorId、RegistersId、LatestValue、ProtocalTypeID、LatestProcessedValue、Upload、LatestTime、DeviceTypeID、FirstID、SecondID及備注等字段名等,圖9給出不同傳感器數(shù)據(jù)采集相關的實時記錄。

圖9 device數(shù)據(jù)表結構及記錄
各傳感器表結構(以溶解氧dbo.AlarmInfo為例)包括SerialNum、DeviceSerialNum、Data、Unit、Max、Min、CreateTime、IsProcessed、ProcessTime、ID及備注等字段名及傳感器每隔一定時間(目前設定為3秒)實時狀態(tài)值如圖10所示。

圖10 傳感器表結構與記錄
其他還包括設備運行日志表(dbo.DeviceLog)、設備類型表(dbo.DeviceType)、傳感器參數(shù)配置(dbo.ParmeterConfig)、傳感器及所有設備基礎定義(dbo.Sensor)、節(jié)點信息與控制表(dbo.WsnNodes)、協(xié)議類型定義(dbo.ProtocalType)、傳感器注冊設定(dbo.Registers)及Web設計相關表如系統(tǒng)調(diào)用的函數(shù)定義(dbo.SysFunction)、Web站點遠程登錄(dbo.SysLogin)、報警的語音定義(dbo.TTSData)等,用設備ID和采集時間作為主鍵索引。
4.3 上位機水質(zhì)在線監(jiān)測系統(tǒng)的功能設計與案例實現(xiàn)
上位機Web服務器利用IIS構架及XML Web Service構建,Web界面采用Microsoft Visual Studio 2015設計。
水質(zhì)實時監(jiān)測系統(tǒng)設計的功能模塊包括:水質(zhì)監(jiān)測實時環(huán)境、設備控制及控制記錄、水質(zhì)數(shù)據(jù)查詢及預警子系統(tǒng)。系統(tǒng)基于.NET框架進行的Web系統(tǒng)設計,B/S模式實現(xiàn)過程[21],主要包括系統(tǒng)遠程登錄管理、節(jié)點管理、實時監(jiān)測與顯示及圖表數(shù)據(jù)管理等。水質(zhì)預警與峰值報警在.NET系統(tǒng)可設計基線閾值范圍,預警也可以進行移動終端設計,開發(fā)基于Android平臺的APP在移動終端及短信接口,利用WLAN或GPRS接入到遠程服務器數(shù)據(jù)中心后臺就可以實時了解水質(zhì)動態(tài)值及報警短信提醒。
基于上述設計,現(xiàn)選定區(qū)域內(nèi)陸湖泊巢湖進行實測,對系統(tǒng)實現(xiàn)的主要功能進行演示。
在主頁面通過注冊用戶合法登錄后,在Web系統(tǒng)頁面選定“實時環(huán)境”選項,可以查看并搜索各傳感器監(jiān)測的實時數(shù)據(jù)“設備控制與控制記錄”選項,“手動控制”可以對機器魚水箱內(nèi)水泵、增氧泵進行控制以實現(xiàn)機器魚上升與下潛及水質(zhì)溶解氧補給,“預警設置”可以對各傳感器閾值進行設定上下臨界點,“控制信息”及“報警記錄”是操控相關的日志信息“數(shù)據(jù)查詢”選項主要是選定傳感器類型按采集的起止日期對傳感器的實時數(shù)據(jù)進行圖表形式的動態(tài)顯示,為峰值預警及數(shù)據(jù)分析、數(shù)據(jù)模型建立提供服務如圖11所示。

圖11 傳感器歷史數(shù)據(jù)查詢
4.4 測試樣本分析
設計的系統(tǒng)是通過區(qū)域選定,在內(nèi)陸湖泊巢湖的東岸、中心島、西岸、兩條主要入湖河流河口篩選5個巡游內(nèi)測點進行試驗。
首先讓終端節(jié)點機器魚及攜帶WiFi通信模塊與網(wǎng)關的協(xié)調(diào)器機器魚用手機終端APP程序控制到達設定的路徑采集點附近,查看WSNs的節(jié)點TOP圖,確定終端節(jié)點與協(xié)調(diào)器機器魚群自組網(wǎng)成功后,按手機APP界面上的“開始”按鈕開始測量該點附近的水質(zhì)參數(shù),包括水溫水位、溶解氧、PH 值、電導率、濁度和測量點對應的經(jīng)緯度等信息,同時實測點投放一臺高精度Hydrolab多參數(shù)水質(zhì)實測分析儀、一臺恩智浦陀螺經(jīng)緯儀(可以很方便地轉(zhuǎn)換成Matlab坐標)用于實時采集數(shù)據(jù)備本,以便對測得的經(jīng)緯度、水質(zhì)實測數(shù)據(jù)與系統(tǒng)獲取的數(shù)據(jù)進行對比分析,每個采集點每天都是從早晨10左右開始連續(xù)取樣30分鐘后(設定每2分鐘自動取樣一次,每個采集點取樣本15次),按“停止”按鈕,利用APP程序其他控制按鈕可以讓機器魚群巡游到下一個采集點進行實測試驗。通過對5個巡游點八種參數(shù)實測與設計開發(fā)的系統(tǒng)取值量值(表2至表5)數(shù)據(jù)對比可繪制出線性圖,5個點圖形基本一致,現(xiàn)選定中心島測定點樣本圖(如圖12所示)進行分析。
從圖12可以得到,水溫、溶解氧、PH值、電導率測定值與實際值也有一定的誤差,其中水溫、溶解氧、PH值平均誤差率分別為0.18%、0.5%及0.01%相比王士明等人提出的僅利用WSNs網(wǎng)絡的0.79%、2.7%和0.52%具有明顯的測定精度優(yōu)勢。
從多因素分析確定引起誤差是由于實測后期機器魚在水中受風產(chǎn)生的波浪的影響最大,另外算法、選定的傳感器品質(zhì)、采集與上傳時延、樣本選址等也會產(chǎn)生一定的閾值變化,且差異相比初值的梯度誤差隨采集時間有逐步增大的現(xiàn)象,后期還須深入研究,找出原因并給予校正。其他傳感器與經(jīng)緯度數(shù)據(jù)的實測值與實際值,經(jīng)過多次實測、算法修正與較驗,目前離散性極小,幾乎忽略不計,系統(tǒng)測量顯示的數(shù)據(jù)與高精度水質(zhì)分析儀、陀螺儀獲得的數(shù)據(jù)基本一致,系統(tǒng)基本能夠滿足水質(zhì)在線監(jiān)測的需求。

圖12 樣本線性圖

表2 水溫、水位實測值及誤差

表3 溶解氧與PH值實測值及誤差
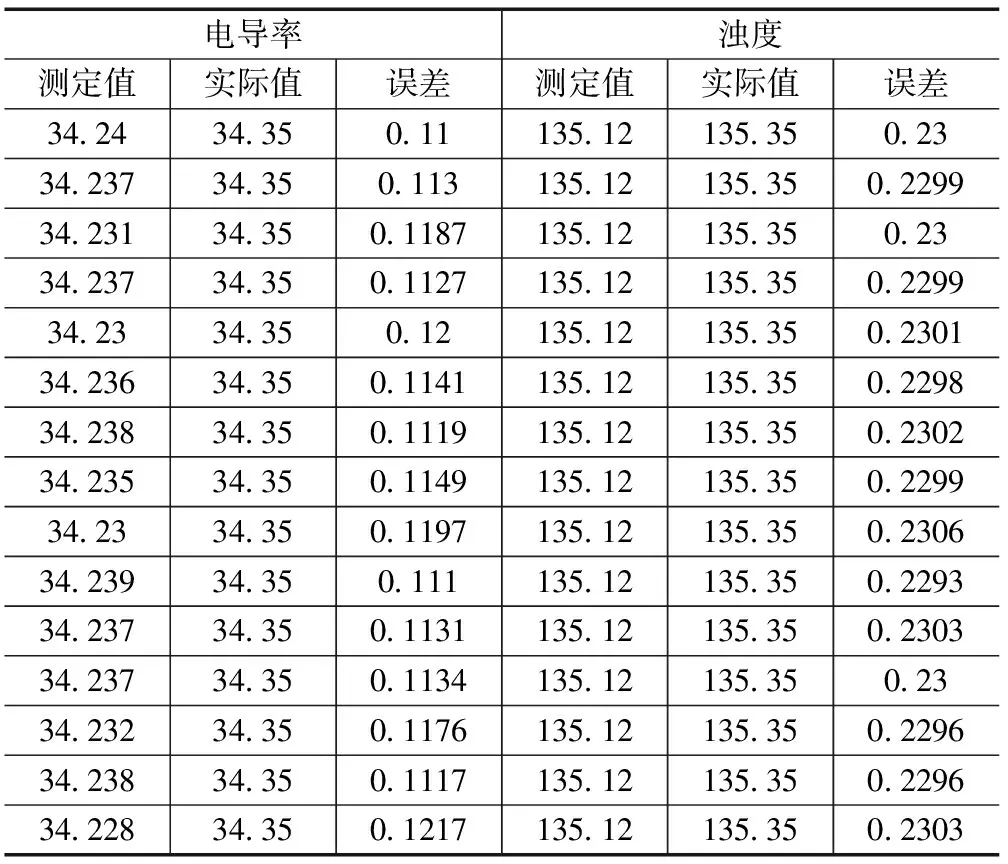
表4 電導率、濁度實測值及誤差
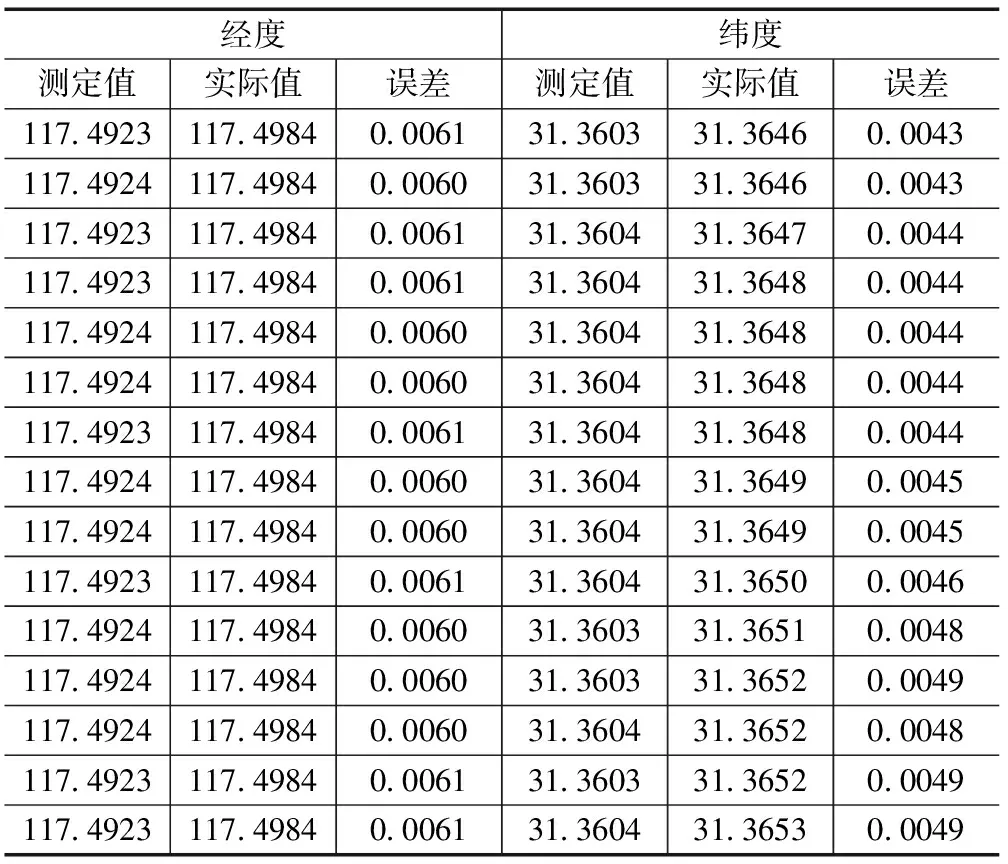
表5 經(jīng)緯度實測值及誤差
與該系統(tǒng)相關的自動巡游軌跡及避障算法研究、機器魚自動導航與定位實現(xiàn)、多水質(zhì)傳感器的研發(fā)、實測樣本差異性分析與優(yōu)化、多樣本大數(shù)據(jù)挖掘與預警模型再造等研究也取得預期的進展,確保了平臺實用性、精準性與可延展性。
5 結束語
大范圍河湖特別是“三河三湖”水環(huán)境智能及遠程監(jiān)測系統(tǒng)目前主要還是采用國家級固定基站為主、區(qū)域二級布點加上移動節(jié)點、航標船只等采樣獲得,成本高,實時性差,數(shù)據(jù)采樣精度不高。利用基于WSNs技術的機器魚,攜帶多參數(shù)傳感器,通過遠程WiFi通信實現(xiàn)對區(qū)域內(nèi)水質(zhì)實時監(jiān)測,不僅集成了固定節(jié)點與移動節(jié)點諸多優(yōu)點,而且成本低,布點、數(shù)據(jù)采集與傳送靈活。同時機器魚巡游、自組網(wǎng)、受控便捷,采集點路徑規(guī)劃及到達率高,受天氣等外環(huán)境影響小,對水環(huán)境監(jiān)測特別是水下實時監(jiān)測非常實用。同時移動終端的設計對機器魚巡游控制非常方便,Web桌面開發(fā)使得水質(zhì)環(huán)境實時顯示、分析、水箱控制及峰值預警提供的方案實用、有效、可行。目前通過在十多家企事業(yè)單位(包括飲用型水庫、大規(guī)模精細水產(chǎn)養(yǎng)殖場等)推廣應用,系統(tǒng)穩(wěn)定可靠,監(jiān)測、預警預報、增氧等措施及時便捷,值得推廣應用。
[1] 王士明,俞阿龍,楊維衛(wèi).基于ZigBee的大水域水質(zhì)環(huán)境監(jiān)測系統(tǒng)設計[J].傳感器與微系統(tǒng),2014,33(11):102-105.
[2] 付煥森,曹 健,李元貴.基于ZigBee和GPRS的仿真機器魚水質(zhì)監(jiān)測系統(tǒng)設計[J].中國農(nóng)機化學報,2016,37(7):179-182.
[3] 王英帥,張 樂,蔣 鵬.基于傳感器網(wǎng)絡的水環(huán)境監(jiān)測系統(tǒng)[J].杭州電子科技大學學報,2014,34(5):91-95.
[4] 周 超,曹志強,王 碩,等.微小型仿生機器魚設計與實時路徑規(guī)劃[J].自動化學報,2008,34(7):772-777.
[5] 桑海泉,王 碩,譚 民,等.基于紅外傳感器的仿生機器魚自主避障控制[J].系統(tǒng)仿真學報,2005,17(6):1400-1404.
[6] Liao T,Stützle T,Montes de Oca M A,et al.A Unified Ant Colony Optimization Algorithm for Continuous Optimization[J].European Journal of perational Research,2014,234(3):597-609.
[7] 馬 騰,趙興忠,高博青.自由曲面形狀和拓撲聯(lián)合優(yōu)化研究[J].浙江大學學報工學版,2015,49(10):1946-1951.
[8] Lai Y C,Lin C C.A Pair-Resolution Blocking Algorithm on Adaptive Binary Splitting for RFID Tag Identification[J]. IEEE Communications Letters,2008,12(6):432-434.
[9] Mika T.Rantanen,Martti Juhola.A Configuration Deactivation Algorithm for Boosting Probabilistic Roadmap Planning of Robots[J].International Journal of Automation and Computing,2012,9(2):155-164.
[10] 齊 勇,魏志強,殷 波,等,于忠達,莊曉東.增強蟻群算法的機器人最優(yōu)路徑規(guī)劃[J].哈爾濱工業(yè)大學學報,2009,41(3):130-133
[11] 童曉紅,陳 玲,徐 偉,等.基于WSNs的巢湖水質(zhì)監(jiān)測系統(tǒng)的設計[J].巢湖學院學報,2015,17(6):84-89.
[12] 劉 洋.湖泊水質(zhì)檢測機器魚的研究[D].武漢:華中科技大學,2012.
[13] 張禮杰,殷建軍,項祖豐,等.多傳感器集成水質(zhì)檢測系統(tǒng)的設計[J].工業(yè)儀表與自動化裝置,2011(1):49-52.
[14] 李金鳳,劉豐喜,楊中華,等.基于無線傳感器網(wǎng)絡及GPRS的水質(zhì)監(jiān)測系統(tǒng)設計[J].計算機測量與控制,2014,22(12):3887-3890.
[15] 彭 亮.基于模糊BP網(wǎng)絡的機器魚水質(zhì)分析系統(tǒng)設計[D].武漢:華中科技大學,2013.
[16] 童曉紅,陳 玲.基于數(shù)據(jù)包捕獲分析ZigBee網(wǎng)絡建立過程[J].佳木斯大學學報(自然科學版),2015,33(6):892-895.
[17] 劉星橋,陳海磊,朱成云.基于GPS的自學習導航游弋式水質(zhì)監(jiān)測系統(tǒng)設計[J].農(nóng)業(yè)工程學報,2016,32(1):84-90.
[18] BILL PHILLIPS,BRIAN HARDY.Android編程權威指南[M].北京:人民郵電出版社,2014.
[19] IAN G.CLIFTON.Android用戶界面設計[M].北京:電子工業(yè)出版社,2014.
[20] 王衛(wèi)星,高奕龍,陳彬彬,陳佳森,朱智斌.無人駕駛自動導航水質(zhì)監(jiān)測船[J].信息技術與信息化,2014(5):36-38.
[21] 黃 歡.基于Web的三峽庫區(qū)水質(zhì)監(jiān)測及分析系統(tǒng)的研究與設計[D].重慶:重慶大學,2009.
Design on Monitoring System for Inland Lake Water Quality Based on Robotic Fish
Tong Xiaohong1,Chen Ling1,Hua Yan1,Yang Lei2
(1.Information Center,Hefei Vocational and Technical College,Hefei 238000,China; 2.Anhui Smart Internet of things Technology Co., Ltd.,Hefei 231000,China)
online measurement of transmission and storage data packet loss rate is high due to the remote multi hop communication rely only onWireless sensor networks. The obstacle avoidance ability of the simulation robot fish in the two-dimensional structural design stage is poor. data acquisition and transmission costs of GPRS traffic is high all weather.in order to solve the above problems, a set of rea-time monitoring system of water quality for automatic obstacle avoidance is designed. the system is designed by using the mobile terminal program, using 3D acquisition path tracking algorithm and WSNs and Wifi hot spot technology to realize the precise control of the robot fish, according the set depth and planning of acquisition point, achieve five water quality environmental datas including of water level and temperature, pH, dissolved oxygen, conductivity, turbidity, etc in real-time acquisition, processing, remote storage, display, analysis and warning. the overall design of the system, the structure and control system design, the hardware system of the terminal node and coordinator, the software design of the upper and lower computer are given.the application of the system to the five sampling points in the Chaohu Lake,the average error rate of water temperature, dissolved oxygen and pH value were 0.18%, 0.5% and 0.01%, respectively,much higher than other water quality on-line monitoring accuracy requirements,to achieve the expected results. It has a very high value for the on-line monitoring and early warning ofreservoir and fine aquaculture.
WSNs; WiFi; robotic fish; inland lake; water quality monitoring; system design
2017-02-04;
2017-03-13。
安徽省自然科學研究重點基金項目(KJ2014A219)
童曉紅(1965-),男,安徽合肥人,工學碩士,副教授,研究方向為物聯(lián)網(wǎng)技術與應用
1671-4598(2017)05-0056-06
10.16526/j.cnki.11-4762/tp.2017.05.017
TP273
A
猜你喜歡
環(huán)境(2023年5期)2023-06-30 01:20:01
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代水產(chǎn)(2019年1期)2019-05-16 02:42:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
河南科技(2014年23期)2014-02-27 14:19:07
