基于對(duì)照區(qū)設(shè)置的結(jié)化霜曲線去除霧噪聲的方法實(shí)現(xiàn)
2017-05-24 14:45:32譚澤漢
計(jì)算機(jī)測量與控制 2017年5期
譚澤漢
(珠海格力電器股份有限公司,廣東 珠海 519070)
基于對(duì)照區(qū)設(shè)置的結(jié)化霜曲線去除霧噪聲的方法實(shí)現(xiàn)
譚澤漢
(珠海格力電器股份有限公司,廣東 珠海 519070)
以空調(diào)結(jié)霜、化霜的視頻為研究對(duì)象,基于畫面灰度特征變化,獲取結(jié)化霜過程的時(shí)序監(jiān)控?cái)?shù)據(jù);然后,重點(diǎn)研究了含霧氣噪聲時(shí)序數(shù)據(jù)的平滑問題;提出一種通過設(shè)置同步采樣的對(duì)照區(qū)的方法,監(jiān)測霧氣出現(xiàn)與消退的動(dòng)態(tài)變化,用以識(shí)別定位霧氣的存在區(qū)間;再基于線性內(nèi)插值方法,對(duì)結(jié)化霜時(shí)序曲線的相關(guān)區(qū)間數(shù)據(jù)進(jìn)行差值重構(gòu),實(shí)現(xiàn)濾除霧氣噪聲同時(shí)不影響無噪聲數(shù)據(jù)質(zhì)量的目標(biāo);最后給出本方法適用的一些條件;實(shí)驗(yàn)表明,基于對(duì)照區(qū)設(shè)置的方法能夠?qū)F氣干擾取得很好的曲線平滑效果;且這個(gè)方法的實(shí)現(xiàn)原理簡單,對(duì)數(shù)據(jù)曲線的消噪平滑效果比較好,在曲線平滑應(yīng)用領(lǐng)域可以有一定的應(yīng)用空間。
對(duì)照設(shè)置;時(shí)序數(shù)據(jù)平滑;空調(diào)結(jié)化霜;線性內(nèi)插值
0 引言
圖像識(shí)別和機(jī)器視覺在工業(yè)中應(yīng)用比較廣泛,但在空調(diào)實(shí)驗(yàn)室中的應(yīng)用案例較少。本文介紹實(shí)驗(yàn)室中自動(dòng)記錄觀察空調(diào)化霜過程數(shù)據(jù)的思路,并詳細(xì)介紹了如何解決化霜過程中產(chǎn)生的霧氣對(duì)實(shí)驗(yàn)曲線的方法。
1 研究意義與現(xiàn)狀
針對(duì)空調(diào)結(jié)化霜過程分析問題,傳統(tǒng)方法依靠實(shí)驗(yàn)員的視頻回放。這種方法強(qiáng)烈依賴實(shí)驗(yàn)員的個(gè)人經(jīng)驗(yàn),而且不易獲取支持分析結(jié)論的數(shù)據(jù)論據(jù)。此外,人工回看視頻的方法,也會(huì)導(dǎo)致分析判斷缺乏全局對(duì)照性。為解決上述問題,同時(shí)便于進(jìn)行結(jié)化霜的自動(dòng)分析,需要將監(jiān)控的過程視頻轉(zhuǎn)換成二維時(shí)序數(shù)據(jù)。這在提高分析效率、減少可程式化處理的重復(fù)工作等方面,具有重要的研究意義。
由圖1可見,空調(diào)外機(jī)結(jié)化霜過程的霜變化,伴隨著強(qiáng)烈的灰度變化。據(jù)此可依據(jù)監(jiān)控目標(biāo)區(qū)域的灰度變化,形成二維時(shí)序監(jiān)控?cái)?shù)據(jù);通過二維曲線,反映空調(diào)外機(jī)的結(jié)化霜過程。但在高低溫實(shí)驗(yàn)中,為保證結(jié)化霜實(shí)驗(yàn)的順利進(jìn)行,需要隔一段時(shí)間就進(jìn)行一次水汽補(bǔ)充;此外,實(shí)驗(yàn)員還需要經(jīng)常進(jìn)出現(xiàn)場,進(jìn)行其它相關(guān)數(shù)據(jù)的采集與檢測。因此,由于溫度的差異與突變,水汽容易形成霧氣(如圖2所示)。霧氣導(dǎo)致了圖像的灰度異變[1],影響正常結(jié)化霜過程的視頻呈像。

圖1 結(jié)化霜過程霜變化示例圖

圖2 有霧氣噪聲干擾的圖像
關(guān)于離散數(shù)據(jù)的平滑問題,胡昌林等[2]通過自適應(yīng)移動(dòng)平均,進(jìn)行數(shù)據(jù)的平滑。但是移動(dòng)平均更適合對(duì)脈沖數(shù)據(jù)噪聲進(jìn)行平滑處理。劉詠梅等[3]基于非線性最小二乘實(shí)現(xiàn)單峰曲線的平滑處理。最小二乘通過不同多項(xiàng)式組合達(dá)到不同的濾波效果。因此本方法只適合對(duì)數(shù)據(jù)進(jìn)行擬合,明顯的區(qū)間噪聲無法得到很好地處理。司禎禎[4]通過極大極小值原則選擇閾值,基于傅里葉變換與小波變換,實(shí)現(xiàn)高頻含噪信號(hào)的去噪。
插值操作具有良好的保形特性[5]、收斂性、穩(wěn)定性[6],常用于離散數(shù)據(jù)及缺損數(shù)據(jù)的近似估計(jì)與推斷。
2 二維時(shí)序數(shù)據(jù)去除霧噪聲的實(shí)現(xiàn)
2.1 需求分析
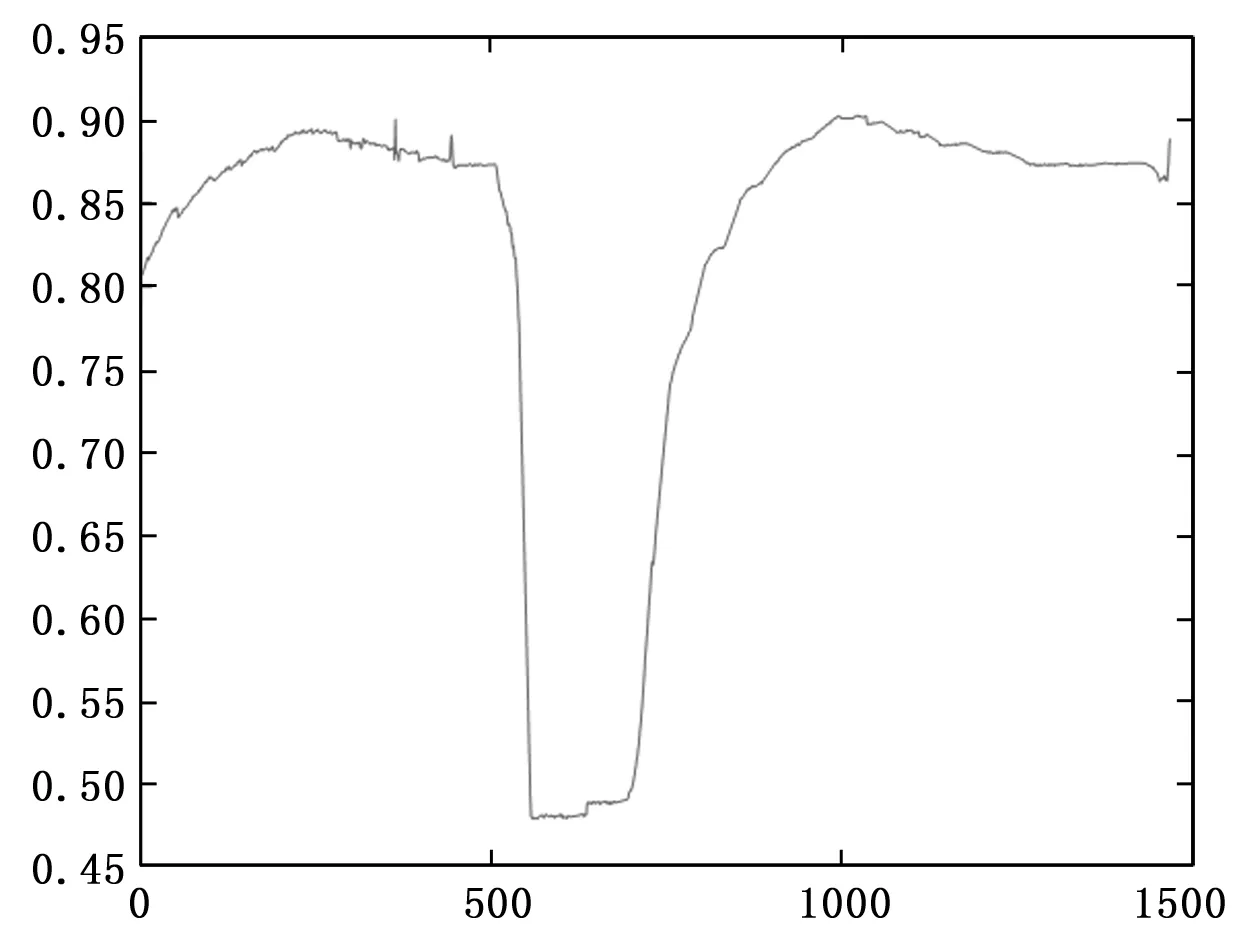
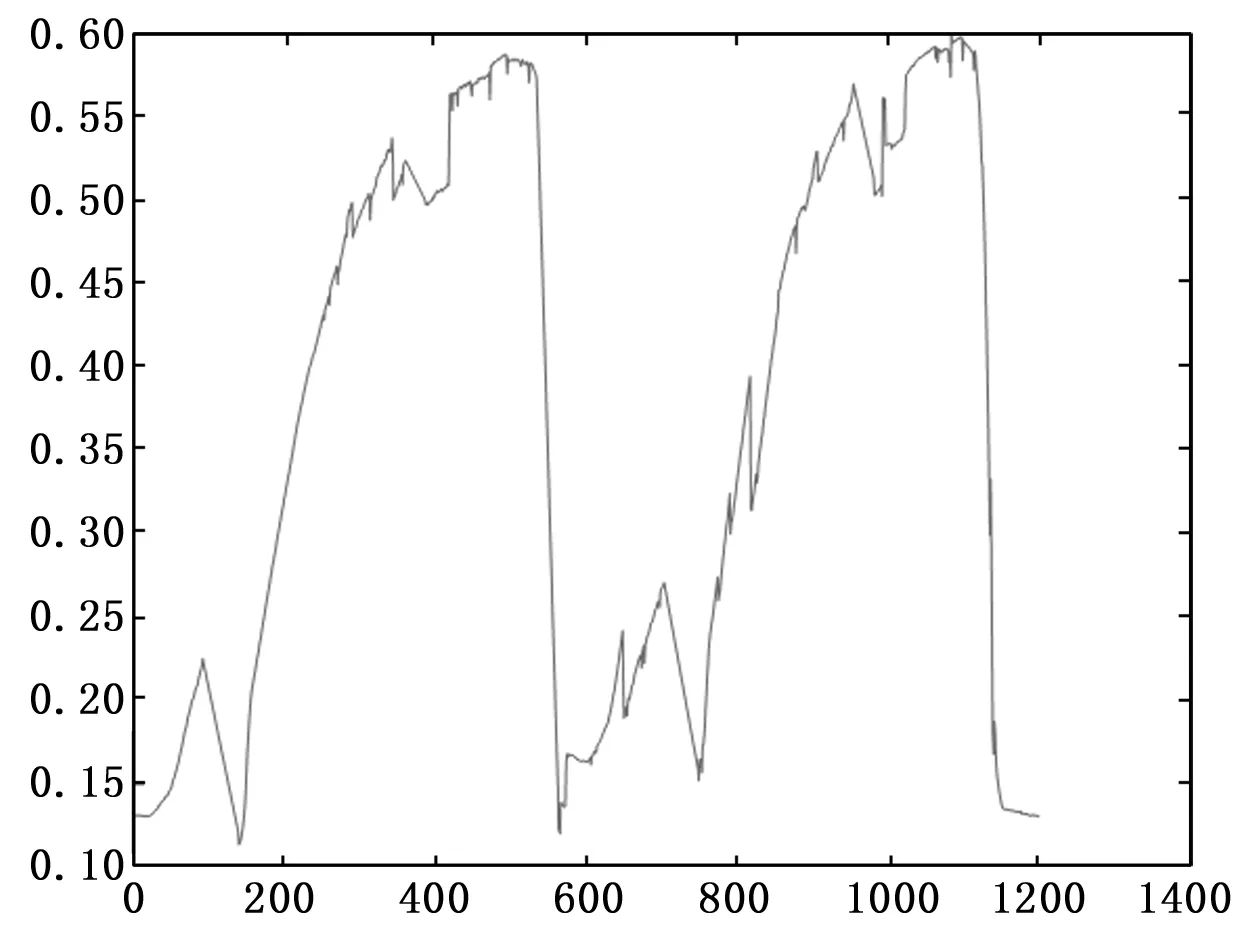
環(huán)境霧氣的特征有兩點(diǎn):(1)霧氣從出現(xiàn)到消散,會(huì)持續(xù)一定時(shí)長;(2)實(shí)驗(yàn)過程中,各霧氣段的濃度峰值一定有較大值,而不是人眼難辨的薄霧。對(duì)二維時(shí)序數(shù)據(jù)的生成而言,環(huán)境霧氣引入了不必要、但又不可避免的數(shù)據(jù)干擾噪聲。圖3展示的二維監(jiān)控?cái)?shù)據(jù),是從一結(jié)化霜過程視頻直接轉(zhuǎn)換而來的。可以容易看出,圖像曲線中存在著系列尖峰狀的霧氣突變噪聲,紅線圈標(biāo)示。此外,在不同監(jiān)控視頻形成的二維時(shí)序曲線中,這種噪聲有時(shí)會(huì)表現(xiàn)得非常劇烈,如圖4所示。對(duì)基于二維時(shí)序數(shù)據(jù)的相關(guān)自動(dòng)分析而言,這些數(shù)據(jù)噪聲的存在是不利的,需要考慮對(duì)噪聲曲線的合理平滑實(shí)現(xiàn)。
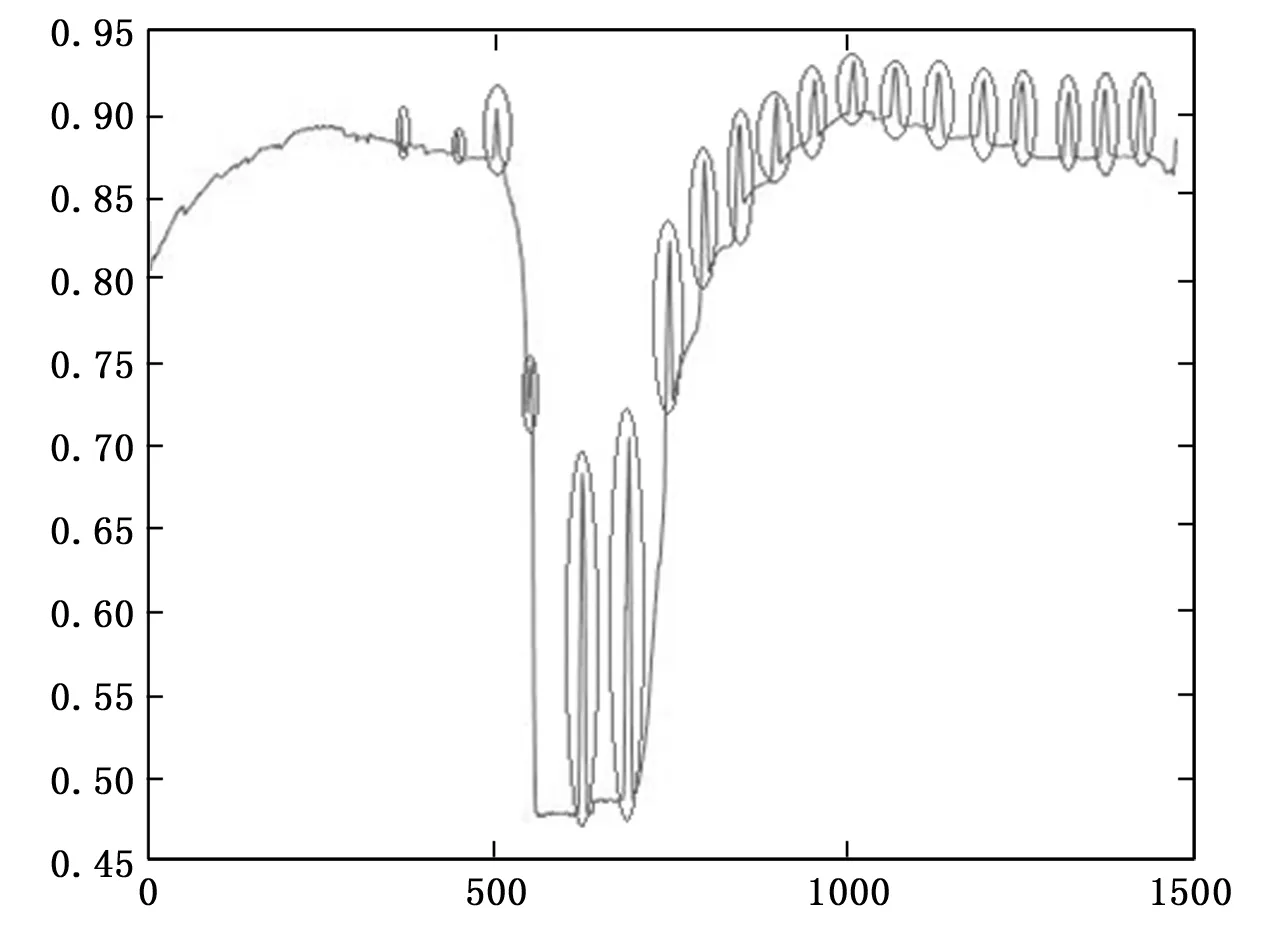
圖3 二維時(shí)序監(jiān)控?cái)?shù)據(jù)曲線
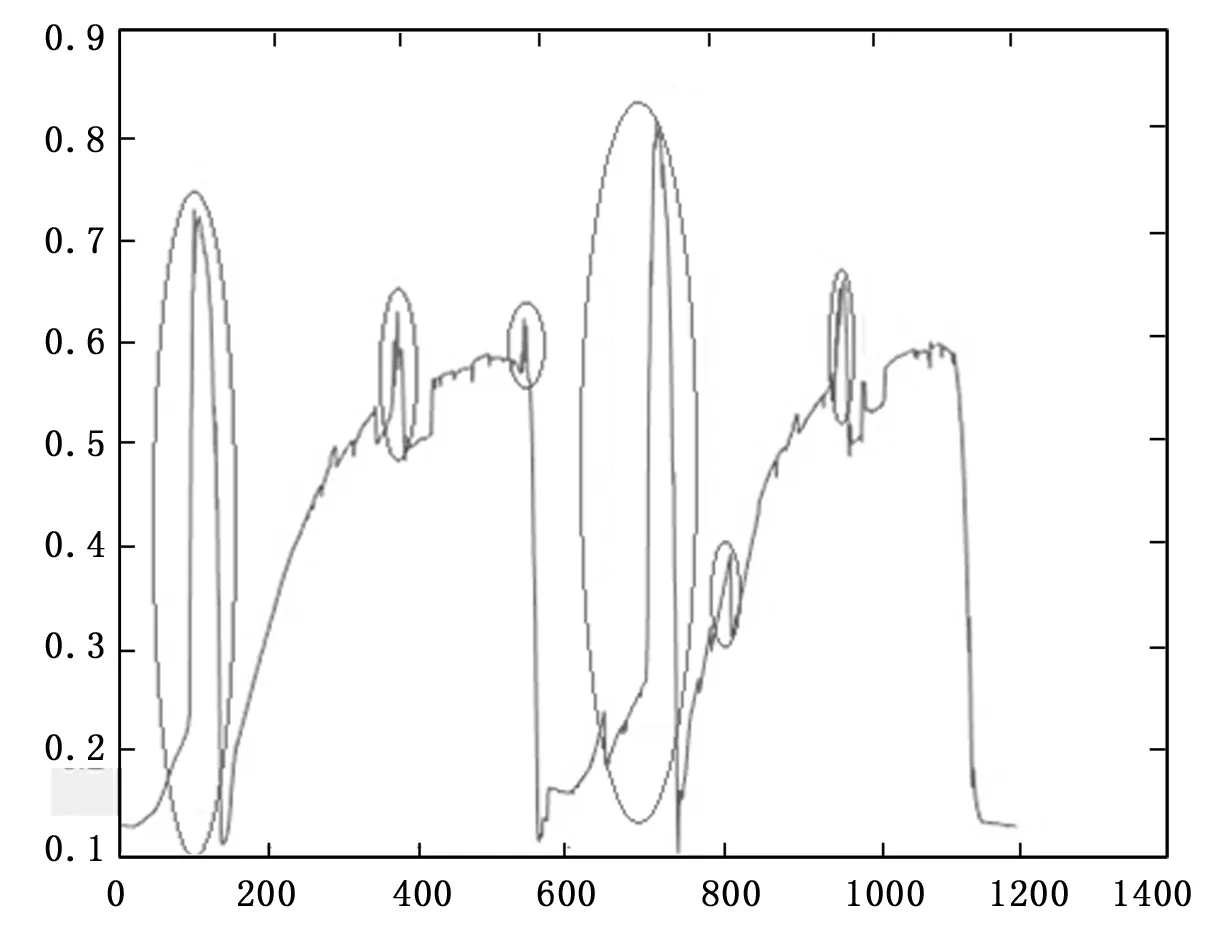
圖4 劇烈噪聲的二維時(shí)序數(shù)據(jù)曲線
正常情況下,化霜階段與結(jié)霜階段的灰度變化,都是比較劇烈的。霧氣噪聲在升降階段的變化,可能與正常的二維時(shí)序曲線具有較大的易混淆性;不同實(shí)驗(yàn)視頻的霧氣狀況,有較大的差異;霧氣的出現(xiàn)及分布,不具備可循的周期性。通過傅里葉變換或者經(jīng)驗(yàn)?zāi)B(tài)分解[7]去除高頻噪聲,在二維時(shí)序數(shù)據(jù)平滑去噪的同時(shí),會(huì)影響到正常的結(jié)化霜過程(尤其是化霜過程)。因此這兩種處理方法,在本問題上并不適用。此外,工程上要求數(shù)據(jù)去噪平滑處理,不可改變結(jié)化霜過程起止點(diǎn)的采樣位置及高度位置。
設(shè)置對(duì)照的思想,實(shí)現(xiàn)原理簡單、在實(shí)驗(yàn)與工程實(shí)踐中應(yīng)用廣泛。由于視頻畫面本身具備同步對(duì)照的條件,因此可通過設(shè)置對(duì)照區(qū)域,用以對(duì)霧氣的出現(xiàn)區(qū)間進(jìn)行識(shí)別與定位。然后返回到主監(jiān)控曲線,對(duì)相關(guān)區(qū)段的二維時(shí)序數(shù)據(jù)進(jìn)行去霧平滑處理。圖5中的邊框?yàn)橐汛_定的主監(jiān)控區(qū)域,深色邊框?yàn)槿斯みx定的對(duì)照監(jiān)控區(qū)域。

圖5 主監(jiān)控區(qū)域與對(duì)照區(qū)域設(shè)置
對(duì)照區(qū)域應(yīng)選擇色差對(duì)比明顯的、平穩(wěn)的環(huán)境區(qū)域。即在監(jiān)控過程的視頻當(dāng)中,對(duì)照區(qū)域應(yīng)當(dāng)只受霧氣噪聲影響,而且其灰度變化能夠?qū)F氣波動(dòng)敏感。
2.2 功能實(shí)現(xiàn)算法與功能偽代碼
2.2.1 算法流程圖
本文的算法實(shí)現(xiàn)如圖6所示。
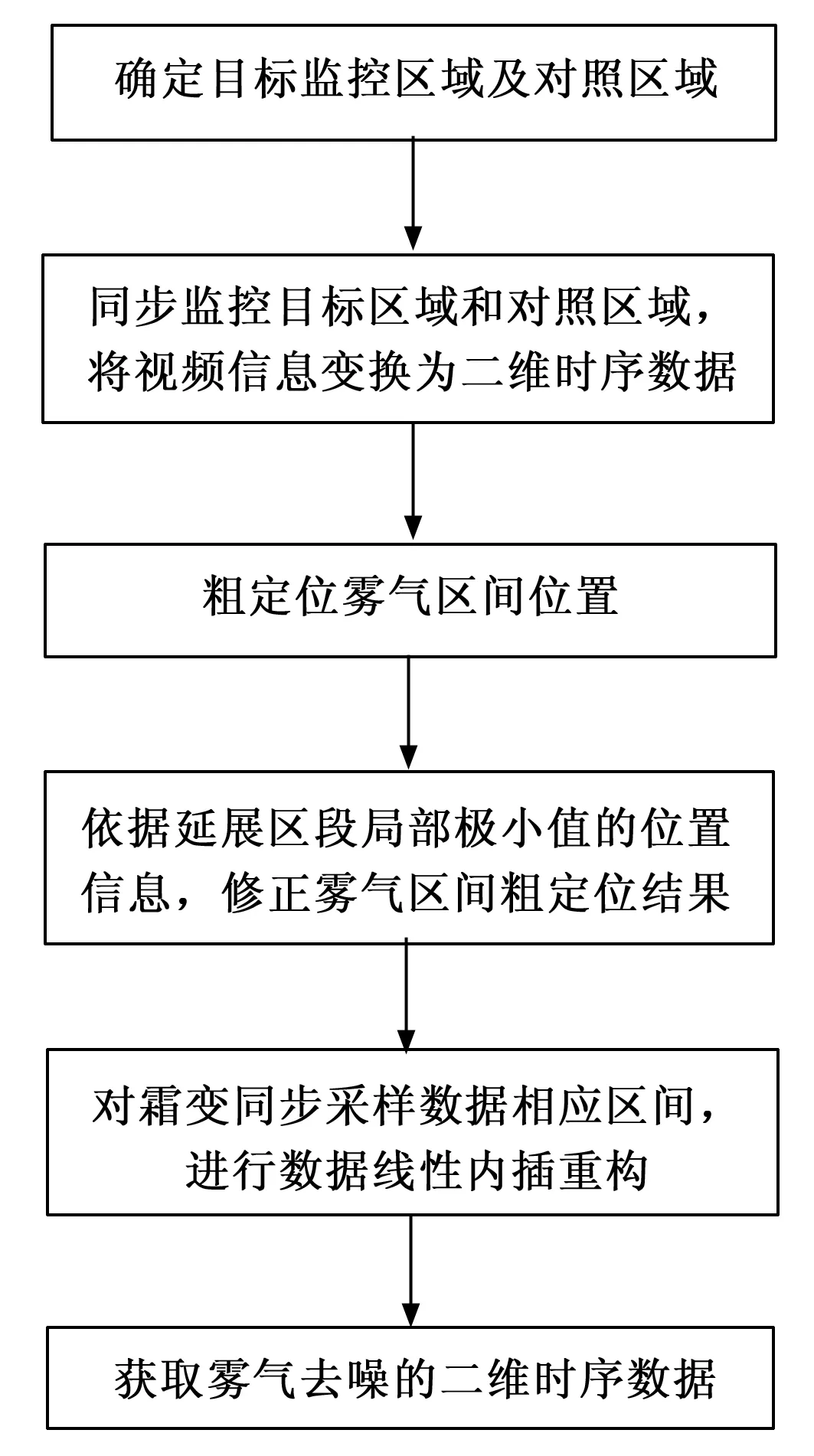
圖6 實(shí)現(xiàn)流程圖
2.2.2 主要功能的實(shí)現(xiàn)偽代碼
(1)霧噪聲區(qū)間粗定位與精定位的實(shí)現(xiàn)偽代碼如下:
輸入:對(duì)照區(qū)域同步監(jiān)控?cái)?shù)據(jù)ctlData;
調(diào)整:將ctlData在0~100范圍內(nèi)縮放;
計(jì)算:算得ctlData的一階差分ctlFod;
IF :ctlFod的方差<平穩(wěn)性判斷閾值
認(rèn)為無霧,跳出函數(shù);
Else:
計(jì)算霧氣存在判定閾值fogTh = 0.99 * max(ctlFod),
計(jì)算粗定位結(jié)果coastPos =(ctlData >= fogTh);
依據(jù)0->1的跳變,確定霧區(qū)間粗定位的位置起點(diǎn)cstSap;依據(jù)1->0的跳變,確定霧區(qū)間粗定位的位置止點(diǎn)cstSpp,
以cstSap為起點(diǎn),向左查找最近鄰的局部極小值點(diǎn),作為對(duì)應(yīng)霧區(qū)間精定位的位置起點(diǎn)finSap;以cstSpp為起點(diǎn),向右側(cè)查找最近鄰的局部極小值點(diǎn),作為對(duì)應(yīng)霧區(qū)間精定位的位置止點(diǎn)finSpp。
說明:本研究設(shè)定的“平穩(wěn)性判斷閾值”為2.0,統(tǒng)計(jì)得到。
(2)霧區(qū)間數(shù)據(jù)線性內(nèi)插重構(gòu)的實(shí)現(xiàn)偽代碼如下:
定位:依據(jù)finSap和finSpp,定位主監(jiān)控曲線的相關(guān)區(qū)間,獲取區(qū)間邊界對(duì)點(diǎn)(bgp,spp);
插值:針對(duì)每個(gè)點(diǎn)對(duì)(bgp,spp)的各采樣位置,進(jìn)行線性內(nèi)插的數(shù)據(jù)重構(gòu),得到監(jiān)控?cái)?shù)據(jù)的去霧平滑結(jié)果mntDar。
2.3 霧噪聲區(qū)間識(shí)別與定位實(shí)現(xiàn)與分析
本功能基于對(duì)照區(qū)設(shè)置及同步采樣進(jìn)行實(shí)現(xiàn)。其中,目標(biāo)監(jiān)控區(qū)域主要用以檢測記錄機(jī)箱區(qū)域的結(jié)化霜狀況,但不可避免含有霧氣等噪聲的干擾;對(duì)照區(qū)域應(yīng)當(dāng)選擇相對(duì)平穩(wěn)的區(qū)域,因此可通過對(duì)照監(jiān)控區(qū)域檢測記錄霧氣的出現(xiàn)和消退。
2.3.1 同步監(jiān)控主監(jiān)控區(qū)域與對(duì)照監(jiān)控區(qū)域
通過同步監(jiān)控采樣對(duì)照區(qū)域與主監(jiān)控區(qū)域,可實(shí)現(xiàn)對(duì)照曲線與主監(jiān)控曲線霧氣出現(xiàn)區(qū)間的準(zhǔn)確對(duì)位,便于對(duì)主監(jiān)控曲線相應(yīng)霧區(qū)間的平滑去噪。得到的監(jiān)控結(jié)果如圖7所示。為突出霧噪聲分布情況,圖中已對(duì)直接監(jiān)控?cái)?shù)據(jù)進(jìn)行[0,100]范圍內(nèi)的數(shù)據(jù)放大處理。可以看出,霧氣噪聲會(huì)呈現(xiàn)出顯著的抬升變化。
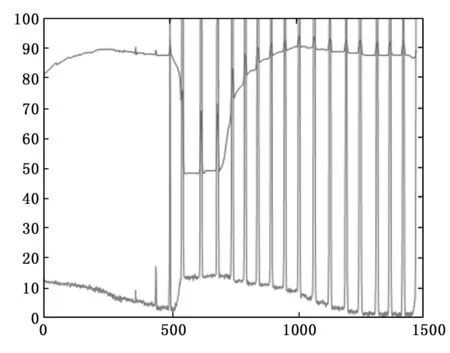
圖7 對(duì)照區(qū)域同步監(jiān)控曲線
2.3.2 霧氣區(qū)間的粗定位與精定位
以對(duì)照曲線為研究對(duì)象,進(jìn)行霧氣區(qū)間的粗、精定位操作。粗定位用以實(shí)現(xiàn)對(duì)突變區(qū)間的粗略定位;精定位用以對(duì)粗定位的結(jié)果進(jìn)行恰當(dāng)?shù)难油卣{(diào)整。通過精定位處理,可避免霧氣區(qū)間寬度識(shí)別的不充分問題,進(jìn)而提高曲線去除霧氣噪聲的有效性。
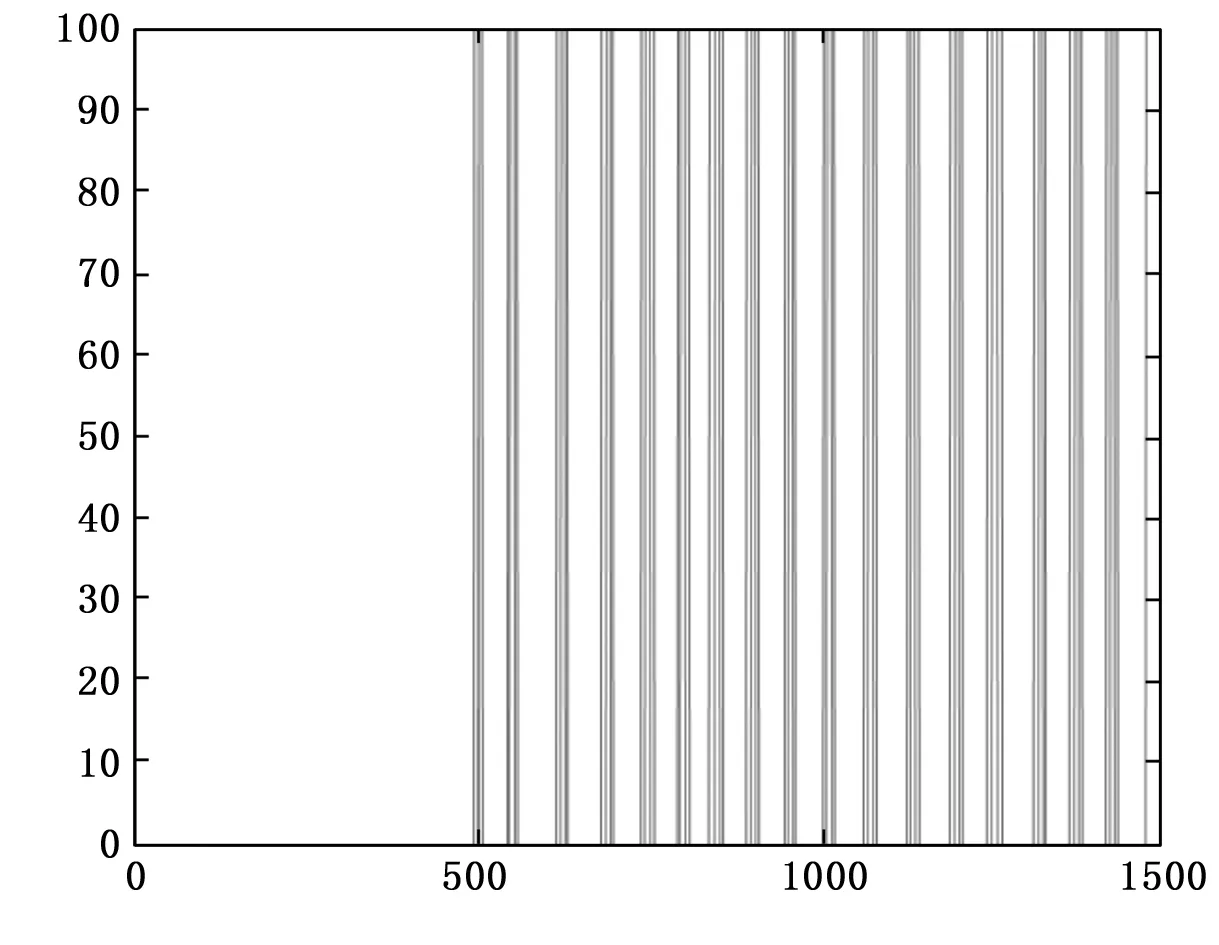
以最大值(這里為100)的99%作為閾值,對(duì)霧氣噪聲區(qū)間進(jìn)行篩選,可對(duì)霧氣區(qū)間出現(xiàn)位置實(shí)現(xiàn)粗定位。粗定位結(jié)果如圖8所示。
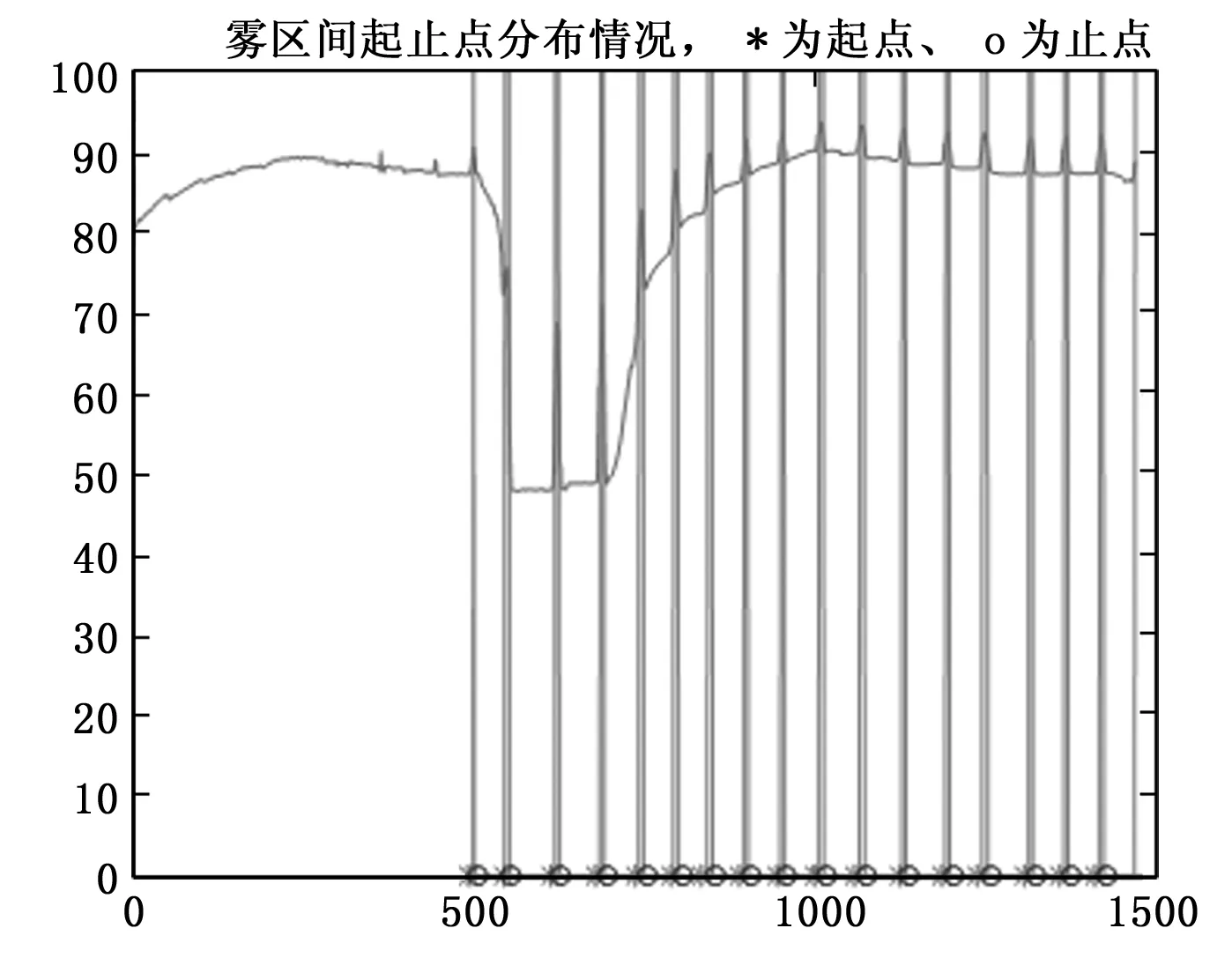
圖8 霧氣區(qū)間粗定位結(jié)果
不難理解,由于篩選閾值設(shè)定的原因,霧氣出現(xiàn)區(qū)間的粗定位結(jié)果,一定是比實(shí)際持續(xù)區(qū)間更狹窄。即實(shí)際區(qū)間的開始位置應(yīng)當(dāng)比粗定位結(jié)果提前,結(jié)束位置應(yīng)當(dāng)比粗定位結(jié)果滯后。
結(jié)化霜實(shí)驗(yàn)中,單個(gè)霧氣過程的出現(xiàn)及消退是單調(diào)變化的。在同一霧氣區(qū)間,不會(huì)出現(xiàn)變濃變淡的反復(fù);換言之,在每個(gè)霧氣過程的峰值兩側(cè),是相對(duì)單調(diào)下降的。因此,基于霧氣變化具有單調(diào)性的物理特點(diǎn),可考慮通過識(shí)別局部極小值點(diǎn),對(duì)霧氣出現(xiàn)區(qū)間粗定位結(jié)果的精定位拓展。
本算法依次以粗定位區(qū)間的左右端點(diǎn)為延拓起點(diǎn),向粗定位區(qū)間的外側(cè)進(jìn)行延拓。延拓終止位置的判斷依據(jù):是否出現(xiàn)局部極小值,將遇到的第一個(gè)局部極小值點(diǎn)作為精定位后的區(qū)間端點(diǎn)。本研究中,通過一個(gè)大小為3的向量模板,確定局部極小值。確定判據(jù)為:當(dāng)滿足Gm 圖9 基于局部極小值的精定位拓展示意 關(guān)于向量模板尺寸的設(shè)置,需要依據(jù)數(shù)據(jù)本身的平穩(wěn)性進(jìn)行選擇。如果數(shù)據(jù)平穩(wěn)性比較好,則大小可以設(shè)置為3;但如果數(shù)據(jù)的平穩(wěn)性較差,則應(yīng)適度拓寬模板尺寸大小,比如選擇5,11等。為方便鎖定判斷鄰域的中心,模板尺寸一定要選擇奇數(shù)。 經(jīng)過區(qū)間延拓后得到的霧氣區(qū)間識(shí)別結(jié)果,如圖10所示。其中,藍(lán)線反映的是霧氣區(qū)間的精定位結(jié)果,橙線反映的是霧氣區(qū)間的粗定位結(jié)果。 圖10 霧氣區(qū)間的精定位與粗定位結(jié)果比較 對(duì)應(yīng)的粗、精定位區(qū)間邊界值數(shù)據(jù)如表1所示,其中起止點(diǎn)的左、右端點(diǎn)為實(shí)際采樣點(diǎn)位置。 結(jié)合圖10和表1數(shù)據(jù)可以看出,通過基于最近鄰局部極小值的精定位處理,外展拓展霧氣區(qū)間的定位邊界。即相對(duì)合理地校準(zhǔn)了霧氣區(qū)間的識(shí)別定位效果。 表1 粗精定位前后霧氣區(qū)間端點(diǎn)變化 2.4 時(shí)序數(shù)據(jù)的插值平滑實(shí)現(xiàn)與分析 理想情況下,主監(jiān)控曲線數(shù)據(jù)應(yīng)當(dāng)為空調(diào)外機(jī)實(shí)際結(jié)化霜過程的監(jiān)控?cái)?shù)據(jù)。但實(shí)際實(shí)驗(yàn)工況中,不含霧氣的曲線段數(shù)據(jù)為真實(shí)結(jié)化霜數(shù)據(jù),需要完整保留且不應(yīng)參與數(shù)據(jù)平滑,這有助于保證后續(xù)數(shù)據(jù)分析的數(shù)據(jù)真實(shí)性需求。霧氣出現(xiàn)區(qū)段的數(shù)據(jù),則受到霧氣噪聲的干擾而嚴(yán)重失真,因此需要對(duì)相應(yīng)區(qū)段的數(shù)據(jù)進(jìn)行平滑處理。 考慮到過程曲線變動(dòng)應(yīng)當(dāng)具有連續(xù)性,本文依據(jù)霧氣區(qū)間位置對(duì)應(yīng)關(guān)系,對(duì)同步采樣的結(jié)化霜時(shí)序數(shù)據(jù),進(jìn)行數(shù)據(jù)的插值重構(gòu),實(shí)現(xiàn)曲線平滑的目標(biāo)。需要注意,插值重構(gòu)只對(duì)相關(guān)區(qū)間端點(diǎn)間的曲線數(shù)據(jù)進(jìn)行。由于本研究對(duì)象的數(shù)據(jù)相對(duì)簡單,這里采用線性內(nèi)插值的方案進(jìn)行實(shí)現(xiàn)。線性內(nèi)插值的原理如式(1)和式(2)所示: (1) yC=k·(xC-xL)+yL (2) 其中:在當(dāng)前區(qū)間內(nèi),k為區(qū)間的線性內(nèi)插斜率,xL、yL分別為區(qū)間左邊界橫縱坐標(biāo)值,xR、yR分別為區(qū)間右邊界橫縱坐標(biāo)值,xC、yC為當(dāng)前待差值重構(gòu)點(diǎn)的橫縱坐標(biāo)值。實(shí)際得到的曲線平滑結(jié)果,如圖11~12所示。 圖11 圖3的二維時(shí)序數(shù)據(jù)去霧噪聲結(jié)果 圖12 圖4的二維時(shí)序數(shù)據(jù)去霧噪聲結(jié)果 從圖11~12可以看出,主監(jiān)控區(qū)域的霧氣噪聲得到較好的平滑濾除,同時(shí)能夠保證無噪數(shù)據(jù)的完整性與真實(shí)性。對(duì)于霧噪聲相對(duì)不劇烈、且單調(diào)性較好的監(jiān)控曲線,如圖3所示,其平滑效果就會(huì)很理想。 本算法基于設(shè)置對(duì)照區(qū)和線性內(nèi)插方法進(jìn)行實(shí)現(xiàn)。通過分析對(duì)照區(qū)的時(shí)序數(shù)據(jù),獲取目標(biāo)區(qū)域噪聲區(qū)間的識(shí)別與定位;通過線性內(nèi)插值的方法,對(duì)霧噪聲區(qū)間的數(shù)據(jù)重構(gòu),實(shí)現(xiàn)霧曲線平滑與去噪。本方法的實(shí)現(xiàn)原理簡單,對(duì)數(shù)據(jù)曲線的消噪平滑效果比較好。 如果一個(gè)問題滿足如下特征,可考慮采用本算法,進(jìn)行數(shù)據(jù)噪聲的監(jiān)測定位與數(shù)據(jù)曲線的平滑。(1)各段噪聲出現(xiàn)后,都會(huì)持續(xù)一定的時(shí)長,且出現(xiàn)位置不規(guī)律、無周期;(2)噪聲數(shù)據(jù)與目標(biāo)數(shù)據(jù),具有一定的易混淆性(如升降斜率、波動(dòng)幅度等);(3)待平滑區(qū)間的數(shù)據(jù),可通過插值進(jìn)行平滑重構(gòu);(4)數(shù)據(jù)分析對(duì)時(shí)間特性要求很高,不允許出現(xiàn)時(shí)間特性方面的處理偏差;(5)噪聲的出現(xiàn)與否,可通過參照域進(jìn)行對(duì)位識(shí)別與定位。 從測試結(jié)果可以看出,對(duì)于部分小的霧噪聲,本算法尚無法充分去除。原因在于本算法需要通過設(shè)定閾值,來篩選霧氣噪聲的存在區(qū)間;閾值設(shè)定的大小,會(huì)直接影響噪聲容忍度。對(duì)該問題,可進(jìn)行深入研究加以改善。 [1] 胡昌林,王 蕾.一種基礎(chǔ)模糊理論的自適應(yīng)數(shù)據(jù)平滑方法[J].現(xiàn)代雷達(dá),2016,38(7):49-51. [2] 劉詠梅,錢 真,申麗然,等.一種新的非線性曲線平滑方法及在測井曲線識(shí)別中的應(yīng)用[J].模式識(shí)別與人工智能,2005,18(4):447-452. [3] 司禎禎.傅里葉變換與小波變換在信號(hào)去噪中的應(yīng)用[J].電子設(shè)計(jì)工程,2011,19(4):155-157. Fog Noise Removing Method of Defrost Curve Based on Tan Zehan (Gree Electric Appliances,Inc.of Zhuhai,Zhuhai 519070, China) The object of this dissertation is the defrosting video of single air-conditioner. Based on the changes of image gray, frost-defrost process time series data is obtained. Then, fogging noise data smoothing is mainly studied. A method of setting synchronous sampling contrast area is proposed. Contrast region is used to monitor fog’s appearance and dissipation, and then fog existence intervals are recognized and oriented. Based on linear interpolation method, inner data within the relevant intervals of frost curve can be adjusted through interpolated reconstruction. By above means, the fog noise of process data can be removed, and data without fog noise can be unaffected. At last, some applicable conditions are provided. Experiments show that the algorithms based on contrast area setting can obtain good curve smoothing results. The principle of this method is simple, and it has a good effect of filtering and smoothing of the data curve. In the field of curve smoothing, it has some application space. contrast setting;time series data smoothing;air-conditioner frost and defrost;linear interpolation 2017-02-21; 2017-03-14。 譚澤漢(1975-),男,山西晉城人,工程碩士,機(jī)電工程師,主要從事數(shù)據(jù)挖掘,機(jī)器學(xué)習(xí),深度學(xué)習(xí)方向的研究。 1671-4598(2017)05-0251-04DOI:10.16526/j.cnki.11-4762/tp TP A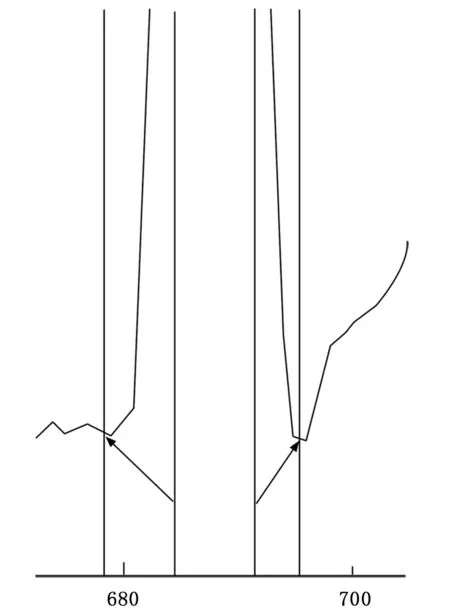
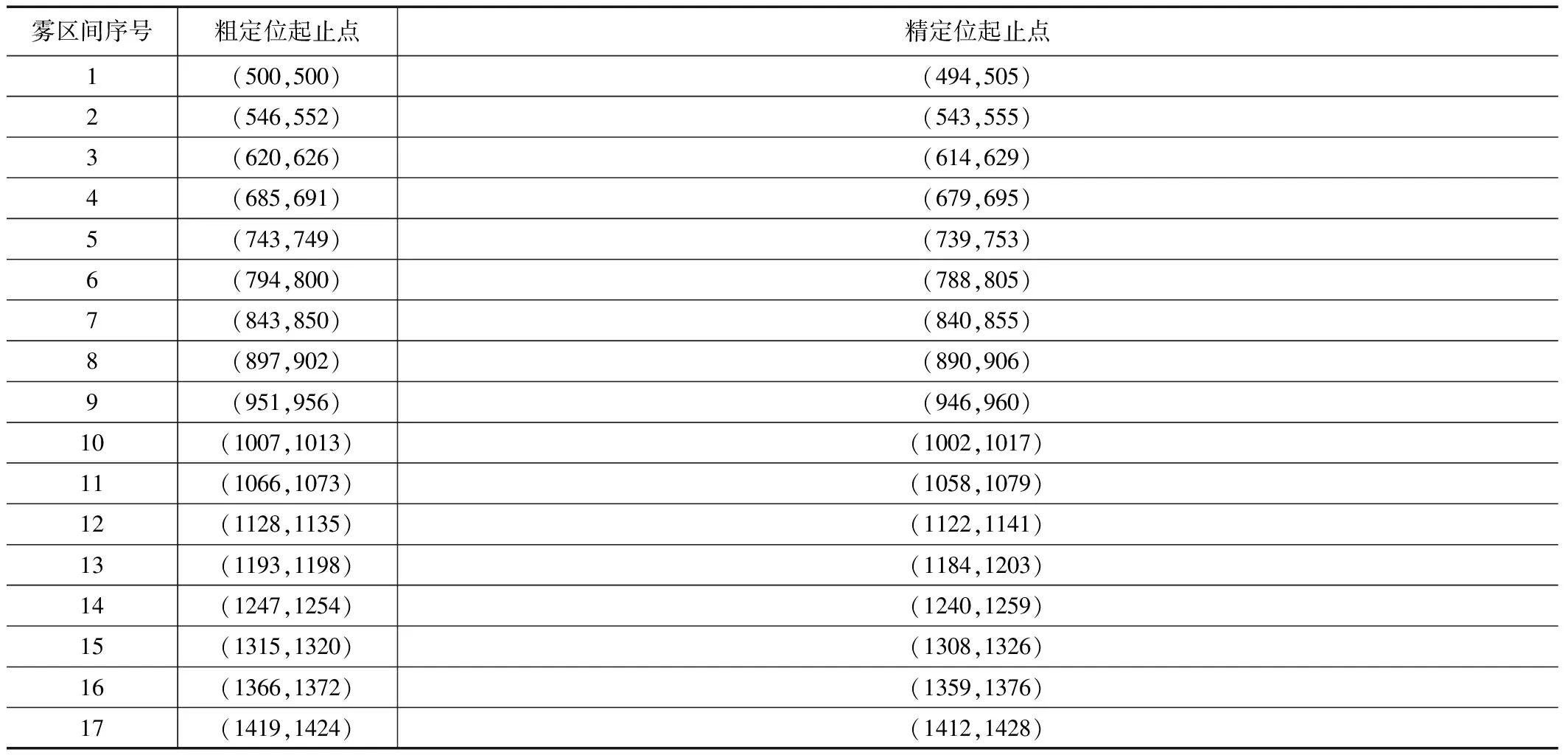
3 結(jié)論
Contrast Area Setting
