基于FPGA的激光光束自對準電氣自動化系統(tǒng)設(shè)計
2017-05-24 14:45:32唐明
計算機測量與控制 2017年5期
唐 明
(西安培華學(xué)院,西安 710125)
基于FPGA的激光光束自對準電氣自動化系統(tǒng)設(shè)計
唐 明
(西安培華學(xué)院,西安 710125)
激光光束技術(shù)運用的越來越廣泛,包括光通信技術(shù),激光測距技術(shù),激光瞄準技術(shù)等,其中光通信技術(shù)范圍最廣;在光通信過程中,需要面對光束發(fā)射端與接收端中心對齊的問題,增加了操作的難度;針對光通信激光光束對準難的特點,研究并設(shè)計了一套基于FPGA的激光光束對準系統(tǒng),利用在FPGA芯片上設(shè)計軟硬件速度快、穩(wěn)定可靠、研發(fā)周期短等特點;整個系統(tǒng)以FPGA芯片為核心,輔以操作電路、自適應(yīng)算法;實驗表明, 該系統(tǒng)較好地符合了光束對準的要求。
FPGA;激光對準;自動化
0 引言
隨著經(jīng)濟的發(fā)展,社會的進步和科技的發(fā)展,人們的生產(chǎn)生活對通信業(yè)務(wù)要求越來越多樣化,對信道容量提出更高的要求,光通信技術(shù)的出現(xiàn),極大的改善了通信容量和質(zhì)量[1-3],對促進社會的發(fā)展提供了強有力的支撐。
近年來,依托現(xiàn)場可編門陣列FPGA(field programmable gate arrays)技術(shù)來加大系統(tǒng)運算能力,受到大量研究關(guān)注。使用FPGA芯片可以利用其可編寫特點,提高研發(fā)速率從而搶占市場先機。使用FPGA及相關(guān)技術(shù)可以滿足穩(wěn)定可靠對線路干擾低要求[4-6]。
2013年,劉安良的基于FPGA的無線光通信多路信號同步系統(tǒng)研究[7];2015年,賈銀杰的基于FPGA的室內(nèi)可見光通信系統(tǒng)物理層設(shè)計與實現(xiàn)[8]。2016年,李宏鑒可見光通信OFDM技術(shù)在FPGA上的設(shè)計與實現(xiàn)[9];這些系統(tǒng)的設(shè)計說明FPGA技術(shù)越來越成熟并廣泛運用到光通信技術(shù)領(lǐng)域。
本文提出,以基于FPGA技術(shù)來建設(shè)一個光通信過程中光束對準自適應(yīng)的系統(tǒng)。以FPGA為核心,完成光束方向調(diào)節(jié),接收端光束的測量和自適應(yīng)算法。方案通過實驗獲得成功,驗證了基FPGA技術(shù)系統(tǒng)的穩(wěn)定高效性。
1 系統(tǒng)總體框架設(shè)計
整個系統(tǒng)的設(shè)計分為兩大部分,硬件模塊和軟件模塊。硬件部分是基于光通信光路的基礎(chǔ)上,分為對光路的調(diào)節(jié)部分和對光束能量的檢測部分。系統(tǒng)的軟件算法是控制光路微調(diào)的部分,為了能夠?qū)崿F(xiàn)系統(tǒng)的自動調(diào)節(jié)功能,引入了自適應(yīng)算法,合理的自適應(yīng)算法可以即快又好的完成任務(wù)。
如圖1所示是激光光束在通信之前的校準檢測的工作示意圖。在圖1中,激光器發(fā)射的光束首先經(jīng)過兩個凸透鏡(L1,L2)的擴束后,照射到反射鏡(M1)上,經(jīng)過反射鏡改變光路路徑,在光路上會存在其它改變光路徑的器件,經(jīng)過多次路徑改變后的出射光束入射到接收端光探測桶,從而探測光束的能量。
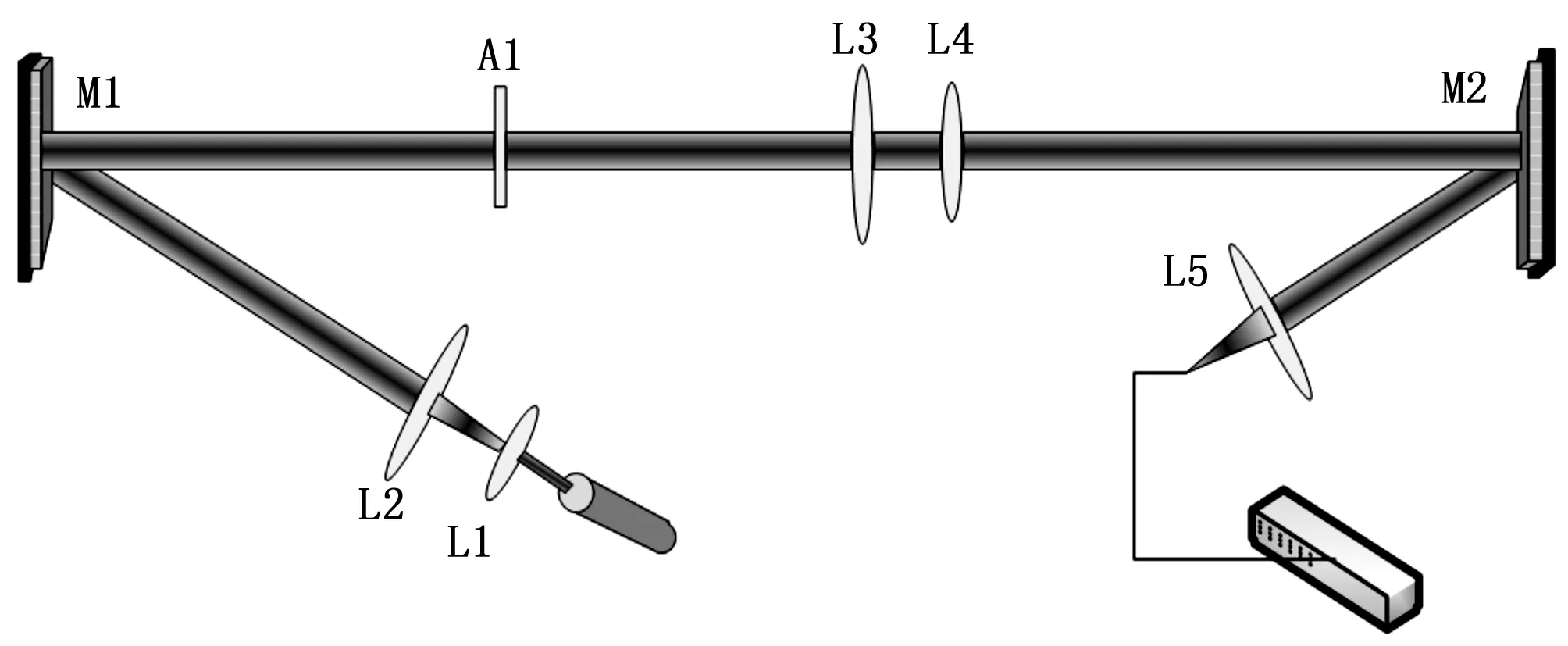
圖1 激光光束校準光路示意圖
為了降低光通信中的噪音,需要接收端的接受的能量最大。接收端將收到的能量數(shù)據(jù)輸入到FPGA控制器中,控制器通過比較計算能量,從而微調(diào)節(jié)線路上的光器件,細致地調(diào)節(jié)光路,使光束盡可能對準且能量盡可能的被接收端接收到。在光器件下面安裝微型調(diào)制器,可以調(diào)劑器件的位置或者方向,調(diào)節(jié)方式和調(diào)節(jié)的光器件受到主控器控制。調(diào)節(jié)的依據(jù)便是收到的能量與目標能量間的誤差值,根據(jù)不同的算法,誤差的評定要求不同。
2 系統(tǒng)硬件設(shè)計
2.1 光器件微型調(diào)節(jié)模塊
為了可以較好地調(diào)節(jié)光學(xué)器件,采用SH2034M型號步進電機驅(qū)動器加上步進電機作為機械調(diào)節(jié)部分。控制器的作用是控制步進電機的變加速度,其工作原理為調(diào)節(jié)控制脈沖的頻率,達到減速時降低脈沖頻率,升速時增高脈沖頻率的目的。通過電壓也可以對電機的正轉(zhuǎn)反轉(zhuǎn)控制。采用軟件延時法或者物理定時器定時器法來確定所需脈沖的周期以及幅度:所謂軟件延時法是通過一個延時程序控制脈沖頻率,其具有動態(tài)的時延。
圖2是SH2034M型步進電機驅(qū)動器內(nèi)部的接口電路。OPTO指的是輸入信號的公共端,其外部系統(tǒng)的VCC必須接在OPTO端。如果VCC為5 V則能夠直接連接,否則,應(yīng)選用其他模式方式,例如CP、DIR、FREE等端子外接電阻R,內(nèi)部所需的8~15 mA的驅(qū)動電流得到保證;DIR:電平信號輸入端,通過高低電平用以控制電機正/反轉(zhuǎn)。為了系統(tǒng)的正常可靠運轉(zhuǎn),信號電平變化與CP脈沖下降沿應(yīng)錯開2.5 μs以上。FREE:低電平有效端,完成脫機控制,一旦此輸入控制端為低電平時,電機則處于脫機自由狀態(tài)。CP: 步進脈沖信號的輸入端,下降沿有效,其最高響應(yīng)頻率設(shè)置應(yīng)不低于200 kHz,并且信號電平穩(wěn)定時間不得小于2.5 μs,只有這樣才能保證其可以正常工作。
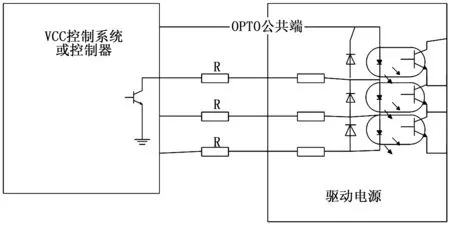
圖2 步進電機驅(qū)動器接口電路
圖3顯示的是步進電機的工作方式。選中該步進機的要求是當此片選由高變低時。數(shù)據(jù)輸入到內(nèi)部寄存器在時鐘上升沿時段。在第一個時鐘期間,數(shù)據(jù)輸入口保持高位表示啟動位。緊接著收到兩個控制位,控制步進機的工作方式。內(nèi)部寄存器清零和輸出停止取決于當片選為高電位時。所以,片選應(yīng)該在整個工作周期內(nèi)保持低電平,否則不工作。
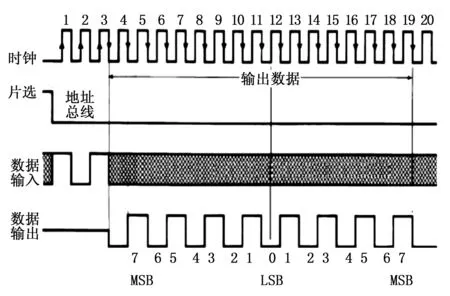
圖3 步進電機時序圖
2.2 能量收集模塊
PIN 光檢測器由三部分組成,分別為較高摻雜的P 區(qū),N 區(qū)和半導(dǎo)體本征區(qū)。如果加上反偏電壓,則其內(nèi)部會產(chǎn)生耗盡層, 當光子能量大于半導(dǎo)體禁帶寬度的光入射到器件表面時, 將產(chǎn)生電子——空穴對, 其在外加電場的作用下會形成光生電流。雖然PIN光檢測器的工作噪聲極低,但是不可以對信號進行放大。PIN 光檢測器的量子效率可表示為:
η=(1-γ)(1-e-αω)
公式中Γ指的是空氣與器件界面的反射損耗,而α是與光波長有關(guān)的光吸收系數(shù), ω代表耗盡區(qū)寬度。PIN 光檢測器的響應(yīng)速度可以達到達納秒量級[3], 其正常工作的工作波長為1.3 μm 和1.5 μm , 廣泛應(yīng)用于各種光接收機中。而具有光柵結(jié)構(gòu)的光濾波器與PIN 集成的光探測器可用于WDM(波分復(fù)用)中的光波長可選擇檢測。
圖4反應(yīng)了光檢測器的響應(yīng)速度。光檢測器是否能夠?qū)饽芰靠焖俨蹲綄刂破飨乱徊綄Ω鱾€光器件的路線控制很重要,如果反應(yīng)過慢將導(dǎo)致光路調(diào)節(jié)過程緩慢,光路對準用時過長,不能及時調(diào)整系統(tǒng)參數(shù),極大地影響系統(tǒng)效率。因此設(shè)置合適的光檢測器響應(yīng)速度對于系統(tǒng)的精準度具有重要作用。
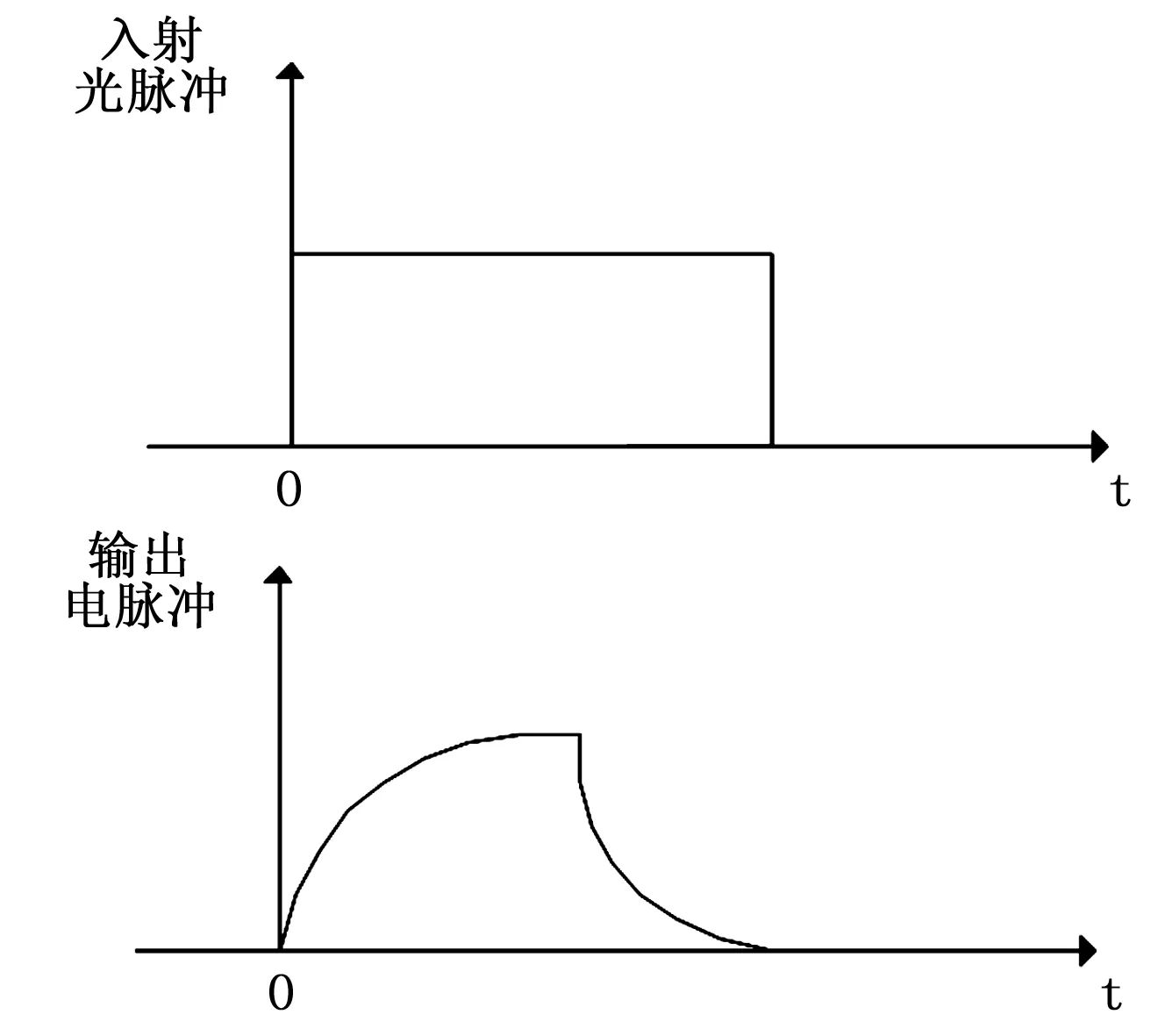
圖4 光檢測器脈沖響應(yīng)
3 系統(tǒng)軟件設(shè)計
3.1 基于LMS自適應(yīng)算法
假設(shè)在光路上有N個可微調(diào)節(jié)的器件用來改變光路,微調(diào)節(jié)器調(diào)節(jié)在n時刻參數(shù)為:x(n)=[x1(n)x2(n) …xN(n)]T,在n時刻檢測到的能量為y(n),則他們關(guān)系:
(1)
式子中ωi為加權(quán)系數(shù)。n時刻光路的能量輸出值y(n)與當前時刻所有光路器件的參數(shù)x1(n)x2(n)…xN(n)有關(guān)。將輸出值和期望值進行作差得到誤差值:
ej(n)=dj(n)-yj(n)
(2)
系統(tǒng)的設(shè)計目標就是可以自適應(yīng)的調(diào)整系數(shù)降低誤差值,使接收端的能量最大。
最小均方算法(LMS)依據(jù)均方誤差(MSE)最小化的準則,即將系統(tǒng)的期望輸出值和實際輸出值的均方誤差最小化作為目標調(diào)節(jié)系統(tǒng)參數(shù)。
(3)
LMS算法的代價函數(shù)為誤差的均方值函數(shù):
(4)
使代價函數(shù)最小得到LMS算法,即:
(5)
其中,α是自適應(yīng)學(xué)習(xí)率,經(jīng)過導(dǎo)數(shù)運算得LMS算法。LMS算法系數(shù)的更新公式為:
ωi(n+1)=ωi(n)+α·ej(n)·xi(n)
(6)
公式(6)中ωi(n)是第n步迭代的系數(shù)矢量,α是迭代的更新步長ej(n)=dj(n)-yj(n)為濾波器輸出與期望信號的誤差函數(shù),設(shè)置合適的步長對系統(tǒng)的收斂速率以及精確度有著重要影響。如果步長設(shè)置大則可以快速收斂,但是卻會影響精度,相反設(shè)置小步長雖然提高了精度但是卻加大了系統(tǒng)的迭代步數(shù)。
圖5是關(guān)于LMS算法簡單的示意圖。由圖可以看出,該算法將系統(tǒng)測得的值與期望值之間的差值作為重要反饋參數(shù),控制器調(diào)節(jié)各個光器件的位置或者方向,使誤差值越來越小,直到取到合適的系數(shù)值。該算法可以在面對突發(fā)情況時自適應(yīng)調(diào)整地調(diào)整整個系統(tǒng)各調(diào)節(jié)器的狀態(tài)以使整個系統(tǒng)光路可以始終保持在對準的狀態(tài)。引入LMS自適應(yīng)算法后實現(xiàn)了系統(tǒng)的自動化調(diào)節(jié),大大提高了系統(tǒng)的效率與適應(yīng)性。
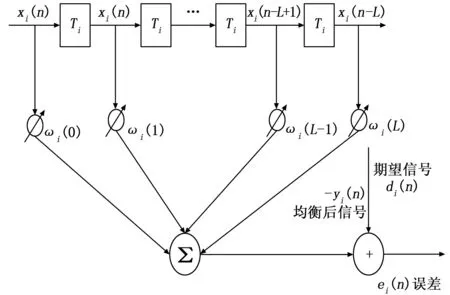
圖5 LMS算法示意圖
算法步驟總計以下幾步:
1)首先設(shè)置各個微調(diào)節(jié)器的默認參數(shù);
2)由于各個參數(shù)會發(fā)生調(diào)整變化,為了能夠找到最合適參數(shù),需要在系統(tǒng)啟動工作前,加入訓(xùn)練序列,該序列可以提前調(diào)整各個微調(diào)節(jié)器的權(quán)值參數(shù);
3)FPGA計算系統(tǒng)接收到的能量值和期望值比較,得出誤差;
4)系統(tǒng)將測得的誤差值作為反饋,系統(tǒng)根據(jù)反饋值自動調(diào)節(jié)設(shè)置合適的參數(shù)。
3.2 算法檢測
為了驗證該算法的可行性與有效性,本文對該算法的收斂情況和能量接受狀態(tài)進行了數(shù)值仿真計算。 仿真中,使用矩陣數(shù)值代表各個調(diào)節(jié)器的參數(shù),提高運算速率。對各個環(huán)節(jié)的數(shù)據(jù)進行監(jiān)控記錄,特別是各個時刻的誤差。
圖6為仿真環(huán)境下,該算法在調(diào)節(jié)參數(shù)過程中直至參數(shù)穩(wěn)定的迭代圖。橫坐標為迭代次數(shù),縱坐標為誤差衡量值。由圖可以看出,隨著迭代次數(shù)的不斷增加,系統(tǒng)的誤差值也隨之不斷降低,直到穩(wěn)定在0.5左右。綜上:LMS在迭代700步后,迭代誤差趨于最小值,算法收斂,收斂后的迭代誤差穩(wěn)定在0~0.5范圍內(nèi);
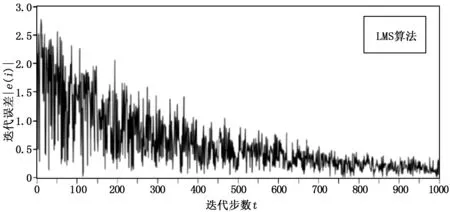
圖6 算法穩(wěn)定所用步數(shù)
圖7是仿真過程中,接收端能量分布的變化。縱坐標是能量的歸一化。圖7(a)是在開始階段,由于光路為調(diào)整時的接收端能量狀況,從中可以看出,能量分布在多個地方,說明能量出現(xiàn)了泄露導(dǎo)致了能量向周圍擴散,降低了接收端對目標位置能量的接受。隨著算法的運行,圖(b)(c)(d)中能量越來越相對集中在一起,說明算法對各個參數(shù)的控制符合系統(tǒng)要求。仿真表明,該算法可靠有效。
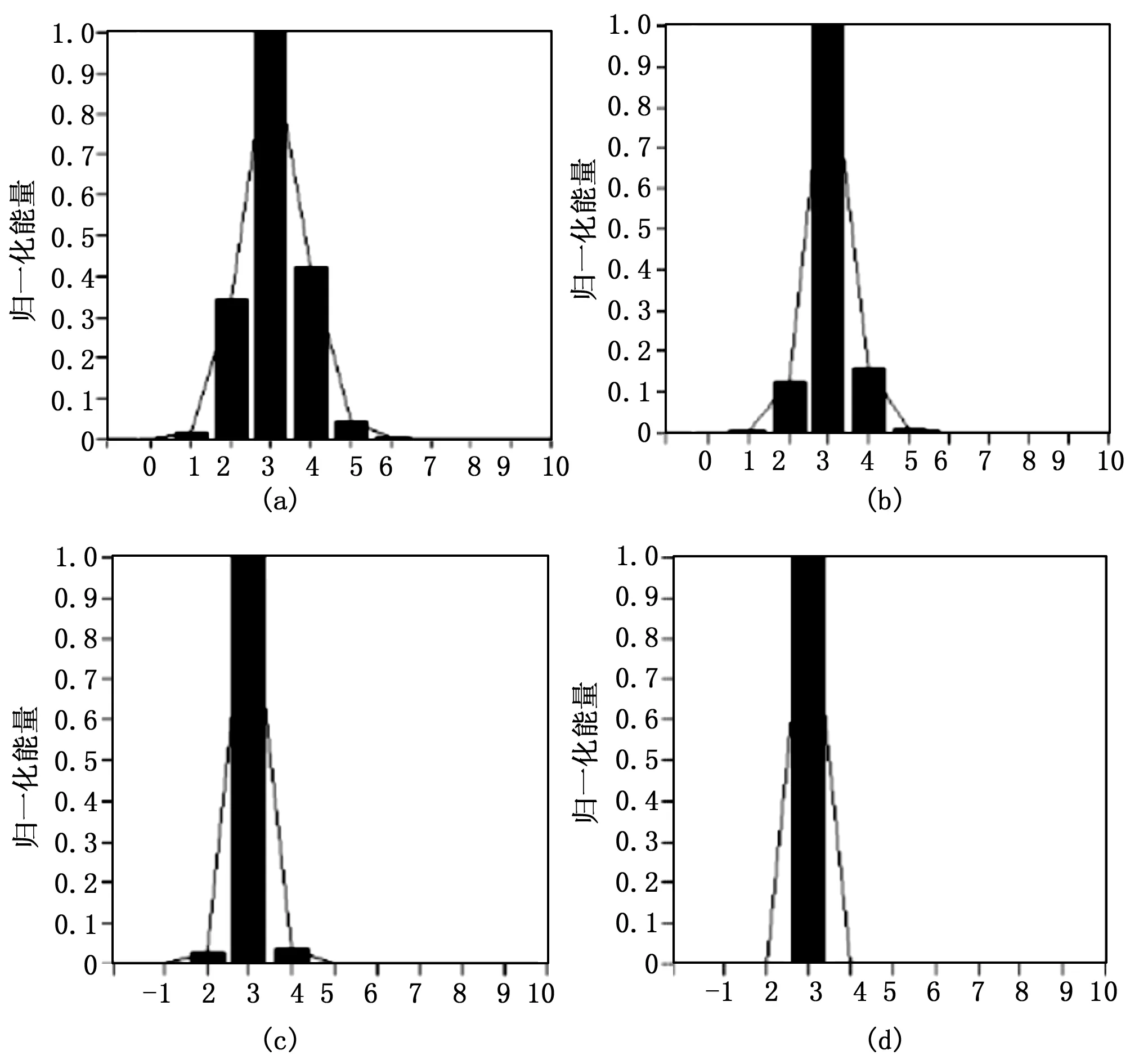
圖7 接收端能量分布仿真圖
4 實驗結(jié)果與分析
4.1 實驗過程
本次實驗是在封閉的空間實驗臺上完成,采用波長為632nm的激光束,光束能量為5nW,傳播距離為8m。光路中共加載了6個可改變光路的調(diào)節(jié)器件,每個光器件的工作波長范圍均包含了632nm以此保證了每個調(diào)節(jié)器都是可工作的。實驗過程中,始終保持光束在同一高度,僅僅改變光路在同一水平面的傳播方向,這樣可以在不影響實驗結(jié)果的前提下,簡化實驗過程,提高驗證效率。為了保證光能量探測器受到影響最低,實驗過程中,需要主動關(guān)閉非必要環(huán)境光源,減少光擾動。
本次試驗中,為了方便觀察光束在光路中的受到的影響,在光束發(fā)送端,加載了一種螺旋相位,從而可以很容易的發(fā)現(xiàn)光路中光束的中心,利于調(diào)節(jié)。在接收端,可以利用螺旋相位的特點,比較容易的接收到目標光束。
4.2 實驗結(jié)果及分析
本節(jié)展示實驗的結(jié)果。
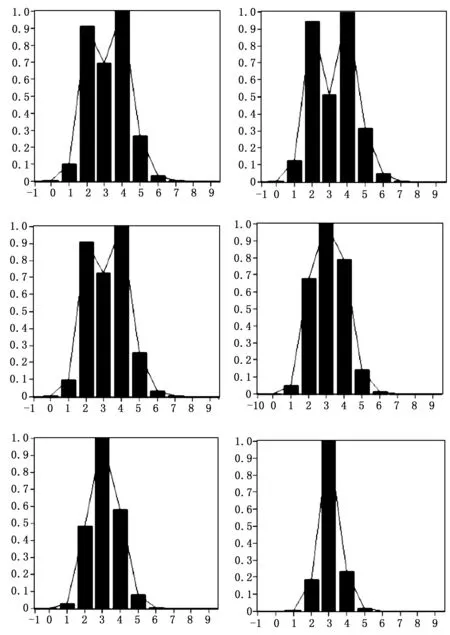
圖8 實驗效果圖
圖8是實驗過程中,接收端收到的能量分布圖。在實驗剛開始階段,由于系統(tǒng)光路僅僅靠人工肉眼對準,光路效果較差,如圖8第一幅圖,能量分布的非常開,說明光路非常差。在第一行的第二幅圖中,能量分布似乎并沒有好轉(zhuǎn),此時系統(tǒng)參數(shù)還在調(diào)整中,系統(tǒng)未穩(wěn)定。在接下來的幾幅圖中,可以發(fā)現(xiàn),能量開始集中,說明系統(tǒng)開始朝著接近于目標方向工作,這個過程由圖8可以清楚看出。最后一幅圖是實驗獲得的最佳狀態(tài)圖,能量最為集中。
從實驗中,可以得出一個結(jié)論:
1)該系統(tǒng)可以完成光路對準功能;光路接收端的能量分布在調(diào)整后較為集中,系統(tǒng)具有基本工作能力;
2)系統(tǒng)使用的自適應(yīng)算法穩(wěn)定有效,算法可以根據(jù)反饋數(shù)據(jù)提供參數(shù)的修改,完成線路光路的微小調(diào)節(jié)和控制。與人工相比,大大提高了工作效率,節(jié)省了科研寶貴時間。
3)實驗過程中,中心能量雖然比較集中,但還夠完美。
4.3 本方案的不足
基于FPGA的激光光束對準系統(tǒng)可以較穩(wěn)定的完成工作,但依然存在些不足:
1)算法有待完善,系統(tǒng)使用的算法不夠快,有待優(yōu)化,在自適應(yīng)算法過程中,存在許多的優(yōu)秀算法;不同的算法對系統(tǒng)的要求不一樣,側(cè)重點也有所不同。當算法過慢后,對系統(tǒng)的靈敏性有潛在的挑戰(zhàn);
2)實驗獲得能量集中的程度與仿真數(shù)據(jù)之間存在一定的差距,可以進一步優(yōu)化;
5 結(jié)論
基于FPGA作為控制系統(tǒng)的核心控制芯片,設(shè)計實現(xiàn)激光光束中心對準系統(tǒng),使之高效穩(wěn)定安全運行,有效減少電能消耗。經(jīng)過對系統(tǒng)實驗分析,本系統(tǒng)達到了較好的效果,其運行穩(wěn)定,達到了目標要求。引入了LMS算法可以在面對突發(fā)情況時自適應(yīng)調(diào)整地調(diào)整整個系統(tǒng)各調(diào)節(jié)器的狀態(tài)以使整個系統(tǒng)光路可以始終保持在對準的狀態(tài)。實現(xiàn)了系統(tǒng)的自動化調(diào)節(jié),大大提高了系統(tǒng)的效率與適應(yīng)性。
[1]陳 特,劉 璐,胡薇薇.可見光通信 [J].中興通訊技術(shù),2013,19(1):49-52.
[2] 丁德強,柯熙政.可見光通信及其關(guān)鍵技術(shù)研究[J].半導(dǎo)體光電,2006,27(1):114-117.
[3] 金 鵬,喻春雨,周奇峰,等.LED在道路照明中的光效優(yōu)勢[J].光學(xué)精密工程,2011,19(1):51-55.
[4] 劉明波,顧夏華,周琳琦.(2011)基于FPGA的遠程溫濕度監(jiān)測系統(tǒng)設(shè)計與實現(xiàn)[J].計算機測量與控制,19(11):2619-1622.
[5] 趙 晶,陳向東,陳欣鵬,等.(2013)基于FPGA的QCM濕度測量系統(tǒng)程序設(shè)計與仿真[J].電子設(shè)計工程,21(22):126-132.
[6] 程素娥.(2010) 基于FPGA的智能壓力傳感器系統(tǒng)[J]. 監(jiān)測與儀表, 37(8):53-55.
[7] 劉安良.基于FPGA的無線光通信多路信號同步系統(tǒng)研究[D].大連:大連理工大學(xué), 2013.
[8] 賈銀杰.基于FPGA的室內(nèi)可見光通信系統(tǒng)物理層設(shè)計與實現(xiàn)[D].北京:北京郵電大學(xué), 2015.
[9] 李宏鑒.可見光通信OFDM技術(shù)在FPGA上的設(shè)計與實現(xiàn)[D].北京:北方工業(yè)大學(xué),2016.
Design of Laser Beam Alignment Automation System Based on FPGA
Tang Ming
(Xian PeiHua University, Xi’an 710125,China)
Laser beam technology is used more and more widely, including optical communication technology, laser ranging technology, laser aiming technology, etc. the optical communication technology is the most widely used. In the process of optical communication, it is necessary to face the problem of the alignment between the transmitter and the receiver. Optical communication based on laser beam alignment difficult characteristics, research and design a set of laser beam alignment system based on FPGA, the design of hardware and software in the FPGA chip, high speed, stable and reliable, the characteristics of the short development cycle. The whole system takes FPGA chip as the core, supplemented by operating circuit and adaptive algorithm. The experimental results show that the system meets the requirements of beam alignment.
FPGA; laser alignment; automation
2017-02-13;
2017-03-07。
陜西省高等教育教學(xué)改革研究項目(15BY122)。
唐 明(1982-),男,江蘇泰興人,講師,主要從事嵌入式開發(fā)、人工智能方向的研究
1671-4598(2017)05-0240-04DOI:10.16526/j.cnki.11-4762/tp
TP
A
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
