導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì)方法研究
2017-05-24 14:45:32劉丙杰
計(jì)算機(jī)測(cè)量與控制 2017年5期
張 磊,肖 凡,劉丙杰
(海軍潛艇學(xué)院,山東 青島 266019)
導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì)方法研究
張 磊,肖 凡,劉丙杰
(海軍潛艇學(xué)院,山東 青島 266019)
運(yùn)用建模的技術(shù)對(duì)導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)進(jìn)行模型設(shè)計(jì)過程中,關(guān)鍵是實(shí)現(xiàn)測(cè)試系統(tǒng)需求描述模型、結(jié)構(gòu)模型和行為模型等的設(shè)計(jì);首先對(duì)導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)的工作流程進(jìn)行了分析,然后在此基礎(chǔ)上利用UML建模方法進(jìn)行測(cè)試系統(tǒng)的各項(xiàng)模型設(shè)計(jì),通過分解用例圖說明測(cè)試系統(tǒng)的需求描述模型,分析系統(tǒng)的結(jié)構(gòu)體系及關(guān)聯(lián)關(guān)系建立了測(cè)試系統(tǒng)的結(jié)構(gòu)模型,運(yùn)用序列圖建立了測(cè)試系統(tǒng)的行為描述模型;最后,根據(jù)上述模型設(shè)計(jì)提出了系統(tǒng)的結(jié)構(gòu)及布置關(guān)系的設(shè)計(jì)方案,并且在實(shí)際導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)開發(fā)中得到了應(yīng)用,實(shí)現(xiàn)了測(cè)試系統(tǒng)的各項(xiàng)測(cè)試功能;結(jié)果表明,采用該建模方法不但能夠有效提高系統(tǒng)設(shè)計(jì)的效率,而且系統(tǒng)在實(shí)用性的基礎(chǔ)上,還具有復(fù)用性及拓展性。
導(dǎo)彈平臺(tái);測(cè)試系統(tǒng);UML;模型
0 引言
導(dǎo)彈慣性平臺(tái)(以下簡(jiǎn)稱平臺(tái))是導(dǎo)彈控制系統(tǒng)的核心儀器,也是控制系統(tǒng)慣性測(cè)量部件,用來測(cè)量導(dǎo)彈在慣性坐標(biāo)系3個(gè)方向的視加速度和彈體坐標(biāo)系的三個(gè)姿態(tài)角信號(hào),供導(dǎo)彈制導(dǎo)系統(tǒng)與姿控系統(tǒng)使用,是導(dǎo)彈重要的技術(shù)保障裝備之一。一般采用陀螺、速度計(jì)、二次集成電路、微組裝電路、雙通道姿態(tài)角傳感器、動(dòng)壓電機(jī)、計(jì)算機(jī)控制、數(shù)字輸出等新技術(shù),其結(jié)構(gòu)復(fù)雜、新技術(shù)密集,其性能測(cè)試是設(shè)備日常維護(hù)的重要工作,文獻(xiàn)[1] 闡述了平臺(tái)產(chǎn)生倒臺(tái)的基本原理和某型慣性平臺(tái)的測(cè)角原理,提出了防倒臺(tái)保護(hù)電路的設(shè)計(jì)思想,給出了具體的設(shè)計(jì)過程,實(shí)驗(yàn)驗(yàn)證了保護(hù)電路的有效性;文獻(xiàn)[2]確定的測(cè)試方法可測(cè)試出出慣性平臺(tái)動(dòng)態(tài)漂移性能,該方法為解決傳統(tǒng)動(dòng)態(tài)測(cè)試中人工操作誤差大、自動(dòng)化程度低的問題提供了新的方案;文獻(xiàn)[3]在深入研究了某型號(hào)平臺(tái)調(diào)平原理的基礎(chǔ)上,設(shè)計(jì)了一套全新的嵌入式調(diào)平系統(tǒng);文獻(xiàn)[4]分析了平臺(tái)瞄準(zhǔn)穩(wěn)定的工作原理,解析了平臺(tái)坐標(biāo)系的數(shù)學(xué)模型;文獻(xiàn)[5]根據(jù)平臺(tái)系統(tǒng)的穩(wěn)定工作原理,通過建立平臺(tái)系統(tǒng)的動(dòng)力學(xué)方程,詳細(xì)分析了搖擺條件下平臺(tái)的動(dòng)態(tài)特性,從平臺(tái)動(dòng)力學(xué)的角度詳細(xì)分析了產(chǎn)生搖擺漂移的機(jī)理。上述研究成果從不同側(cè)重點(diǎn)出發(fā),涉及了導(dǎo)彈平臺(tái)的某一特性或者機(jī)理,但對(duì)于平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì)的研究成果卻鮮有報(bào)道。
隨著導(dǎo)彈平臺(tái)測(cè)試項(xiàng)目與測(cè)試分析的逐步豐富,對(duì)平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì)方法的實(shí)用性、復(fù)用性等需求日益顯現(xiàn)。文中將對(duì)此進(jìn)行探討和研究,以滿足需求的不斷變化,為提高平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì)的實(shí)用性、復(fù)用性等提供了技術(shù)途徑。
1 測(cè)試系統(tǒng)工作流程分析
導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)可以實(shí)現(xiàn)在各種工況下對(duì)平臺(tái)三軸各姿態(tài)角的測(cè)量、3個(gè)方向上加速度的輸出測(cè)量以及3個(gè)軸端力矩電機(jī)的輸出測(cè)量,通過計(jì)算分析出平臺(tái)的性能和精度,具體應(yīng)該完成平臺(tái)穩(wěn)定回路測(cè)試、調(diào)平回路測(cè)試、加速度輸出測(cè)試、方位對(duì)準(zhǔn)回路測(cè)試、漂移系數(shù)測(cè)試、保護(hù)電路測(cè)試、姿態(tài)角測(cè)試等多項(xiàng)測(cè)試,目的就是評(píng)定平臺(tái)的性能狀態(tài),為整個(gè)導(dǎo)彈測(cè)試做準(zhǔn)備。
根據(jù)上述要求,平臺(tái)測(cè)試系統(tǒng)可設(shè)計(jì)為如下實(shí)體:慣性平臺(tái)、三軸搖擺臺(tái)、驅(qū)動(dòng)電源、信號(hào)采集裝置、測(cè)試控制裝置和方位對(duì)準(zhǔn)裝置。整個(gè)測(cè)試系統(tǒng)的基本工作流程如下:平臺(tái)安裝在三軸搖擺臺(tái)上以進(jìn)行各種測(cè)試;三軸搖擺臺(tái)模擬導(dǎo)彈飛行過程中彈體的三維運(yùn)動(dòng);驅(qū)動(dòng)電源提供平臺(tái)以及三軸搖擺臺(tái)工作所需的各種交流和直流電源;信號(hào)采集裝置采集平臺(tái)輸出的各種姿態(tài)角、加速度等信號(hào);對(duì)準(zhǔn)裝置提供平臺(tái)對(duì)準(zhǔn)的基準(zhǔn)并進(jìn)行對(duì)準(zhǔn)時(shí)的角度測(cè)量;測(cè)試控制裝置進(jìn)行測(cè)試項(xiàng)目、過程的控制,管理驅(qū)動(dòng)電源的啟閉,并且對(duì)測(cè)試數(shù)據(jù)進(jìn)行管理。
2 系統(tǒng)模型設(shè)計(jì)
導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì)的關(guān)鍵是實(shí)現(xiàn)系統(tǒng)中各項(xiàng)模型的設(shè)計(jì),這需要對(duì)平臺(tái)測(cè)試系統(tǒng)的測(cè)試需求、系統(tǒng)結(jié)構(gòu)組成和系統(tǒng)工作任務(wù)進(jìn)行仔細(xì)的分析,在此基礎(chǔ)上有針對(duì)性地提出相應(yīng)的模型。本文利用UML(unified modeling language)基于面向?qū)ο蠹夹g(shù)領(lǐng)域的可視化建模方法應(yīng)用于導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì),可以方便快捷的構(gòu)建測(cè)試系統(tǒng)。
采用UML建模方法設(shè)計(jì)導(dǎo)彈平臺(tái)測(cè)試系統(tǒng),主要工作包括需求描述模型設(shè)計(jì)、結(jié)構(gòu)模型設(shè)計(jì)以及行為模型設(shè)計(jì)。對(duì)應(yīng)上述三種模型設(shè)計(jì),UML方法采用三類不同的圖形來分別實(shí)現(xiàn):測(cè)試系統(tǒng)的需求描述模型設(shè)計(jì)具體采用用例圖來實(shí)現(xiàn),測(cè)試系統(tǒng)的結(jié)構(gòu)模型設(shè)計(jì)具體采用靜態(tài)結(jié)構(gòu)圖中的對(duì)象類圖來實(shí)現(xiàn),測(cè)試系統(tǒng)的行為模型設(shè)計(jì)具體采用動(dòng)態(tài)行為圖中的順序圖來實(shí)現(xiàn)。
2.1 需求描述模型
對(duì)于導(dǎo)彈平臺(tái)測(cè)試系統(tǒng),需求描述就是系統(tǒng)測(cè)試項(xiàng)目或者功能的描述,即用戶能夠運(yùn)用系統(tǒng)提供的測(cè)試項(xiàng)目實(shí)現(xiàn)各種平臺(tái)測(cè)試。用例圖能夠體現(xiàn)系統(tǒng)用戶(使用者)與系統(tǒng)提供的用例(測(cè)試項(xiàng)目)之間的某種聯(lián)系[6-7],借助用例圖可以明確測(cè)試系統(tǒng)的各項(xiàng)測(cè)試需求、應(yīng)用范圍等。在具體的需求描述模型設(shè)計(jì)中,采用橢圓表示用例即測(cè)試功能,采用“人形”圖符表示系統(tǒng)的用戶,用例和用戶之間的連線表示二者之間的關(guān)聯(lián)和信息交流。測(cè)試系統(tǒng)需要提供能夠滿足用戶測(cè)試需求的各種平臺(tái)測(cè)試,包括穩(wěn)定回路測(cè)試、調(diào)平回路測(cè)試、方位對(duì)準(zhǔn)測(cè)試、漂移系數(shù)測(cè)試、姿態(tài)角測(cè)試、加速度等測(cè)試,系統(tǒng)用例模型圖如圖1所示。
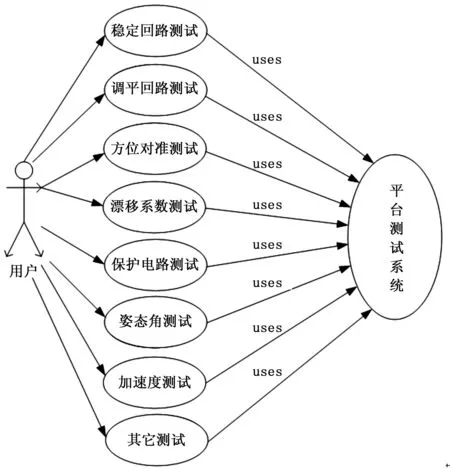
圖1 系統(tǒng)用例模型圖
2.2 系統(tǒng)結(jié)構(gòu)模型
平臺(tái)測(cè)試系統(tǒng)涉及的硬件設(shè)備眾多,包括慣性平臺(tái)、三軸搖擺臺(tái)、驅(qū)動(dòng)電源、信號(hào)采集裝置、測(cè)試控制裝置和方位對(duì)準(zhǔn)裝置等,設(shè)備間相互關(guān)聯(lián)。類(Class)是面向?qū)ο蠹夹g(shù)中最基本的元素,類模型揭示了系統(tǒng)的結(jié)構(gòu)。因此可以采用類模型進(jìn)行系統(tǒng)結(jié)構(gòu)建模,具體方法如下:首先細(xì)化用例模型,提取系統(tǒng)中的類,然后對(duì)類的屬性和操作進(jìn)行描述。
由需求描述的用例圖可知,各項(xiàng)測(cè)試依托測(cè)試系統(tǒng)進(jìn)行,因此,可以建立測(cè)試類模型(Test)來統(tǒng)管不同子類,各子類描述相應(yīng)的平臺(tái)測(cè)試項(xiàng)目,具體而言,根據(jù)圖1的系統(tǒng)需求描述可設(shè)計(jì)為穩(wěn)定測(cè)試類(Sta-test)、調(diào)平測(cè)試類(Hor-test)、對(duì)準(zhǔn)測(cè)試類(Aim-test)、漂移測(cè)試類(Shift-test)、保護(hù)測(cè)試類(Safe-test)、姿態(tài)角測(cè)試類( Gtest-test)、加速度測(cè)試類(Acc-test)和用于功能拓展的其它測(cè)試類(Oth- test)。另一方面,根據(jù)測(cè)試系統(tǒng)的硬件設(shè)備組成建立不同的實(shí)體類模型,包括慣性平臺(tái)類(Inertia-platform)、三軸搖擺臺(tái)類(Swing-rack)、驅(qū)動(dòng)電源類(Driving-force)、信號(hào)采集裝置類(Signal-collection)、對(duì)準(zhǔn)裝置類(Aiming-device)、測(cè)試控制裝置類(Control-device)。測(cè)試類(Test)系統(tǒng)結(jié)構(gòu)體系及相互關(guān)系如圖2所示。
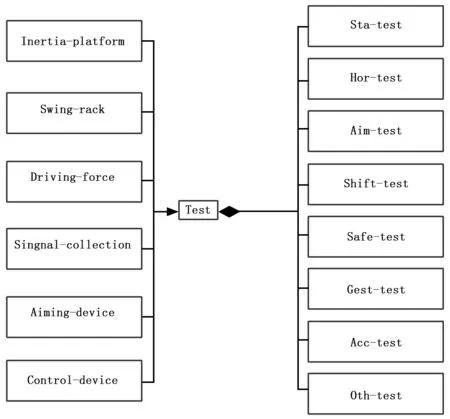
圖2 系統(tǒng)結(jié)構(gòu)體系及關(guān)聯(lián)關(guān)系
2.3 行為描述模型
厘清平臺(tái)測(cè)試系統(tǒng)測(cè)試項(xiàng)目間的行為關(guān)系是建模的重要環(huán)節(jié),UML的順序圖也稱序列圖,能夠很好的描述系統(tǒng)系統(tǒng)內(nèi)部和設(shè)備之間的交互情況,體現(xiàn)設(shè)備間消息傳遞的時(shí)間順序,有利于快速建模和反復(fù)重用,提高系統(tǒng)開發(fā)效率和設(shè)計(jì)效果。
平臺(tái)測(cè)試系統(tǒng)工作時(shí)的行為順序如下:測(cè)試管理器將平臺(tái)測(cè)試步驟轉(zhuǎn)化成控制模型;測(cè)試控制裝置根據(jù)不同的測(cè)試控制模型制定相應(yīng)的測(cè)試控制規(guī)則,啟動(dòng)相應(yīng)的電源輸出電路驅(qū)動(dòng)對(duì)準(zhǔn)裝置、慣性平臺(tái)、信號(hào)采集裝置等硬件設(shè)備;三軸搖擺臺(tái)給慣性平臺(tái)提供三維空間位置,模擬彈體飛行時(shí)各種姿態(tài)運(yùn)動(dòng)狀態(tài);對(duì)準(zhǔn)裝置將基準(zhǔn)對(duì)準(zhǔn)信號(hào)傳遞給慣性平臺(tái);慣性平臺(tái)完成穩(wěn)定、調(diào)平、漂移、對(duì)準(zhǔn)等測(cè)試,其輸出信息由信息采集裝置采集,信息采集裝置將信息轉(zhuǎn)化后發(fā)送給測(cè)試控制裝置,測(cè)試控制裝置對(duì)測(cè)試信息進(jìn)行結(jié)果分析。這一行為過程如圖3所示。
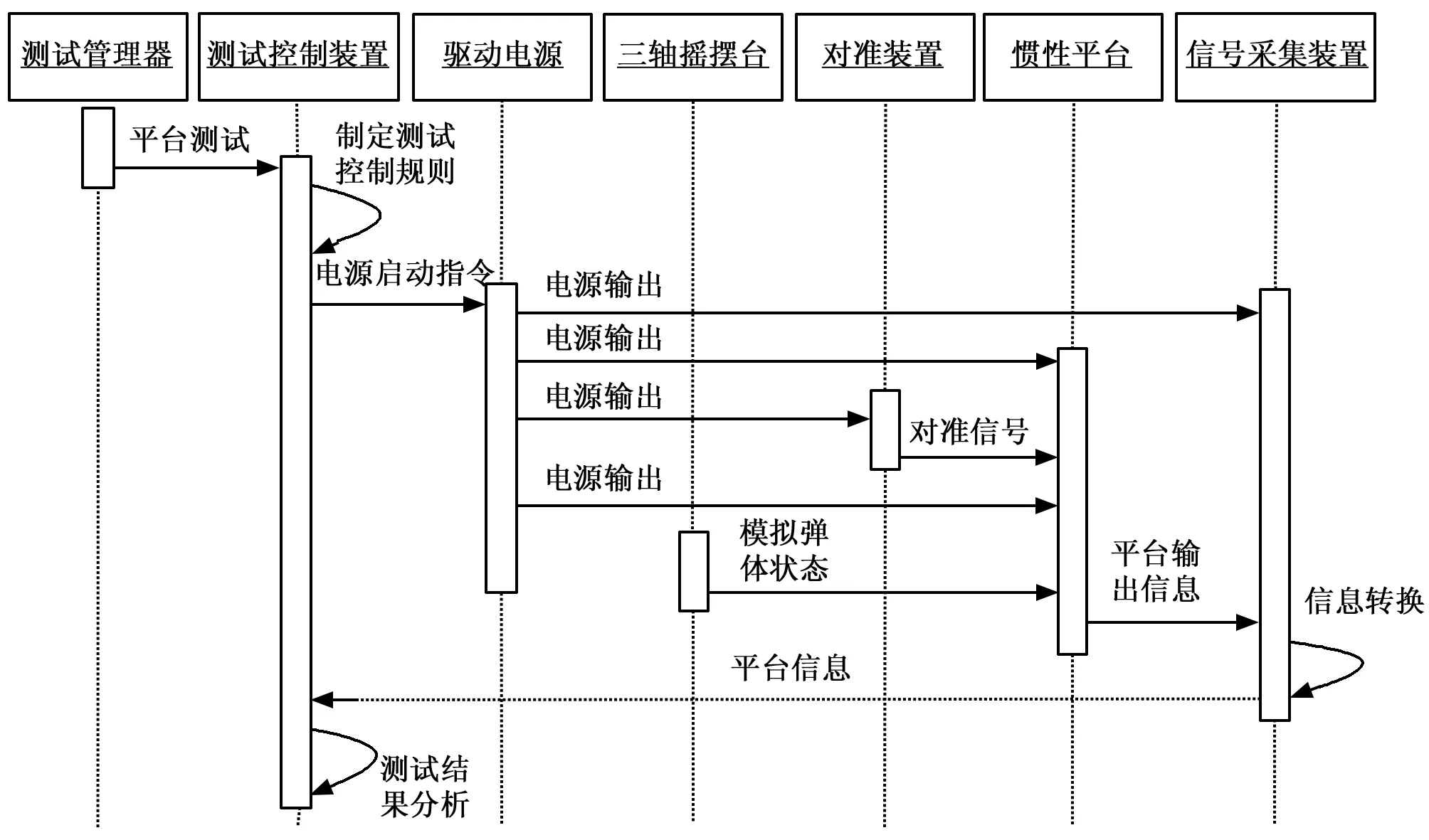
圖3 平臺(tái)測(cè)試行為順序圖
3 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
根據(jù)前文所建立的系統(tǒng)結(jié)構(gòu)模型及行為描述模型,平臺(tái)測(cè)試系統(tǒng)的硬件支撐環(huán)境可設(shè)計(jì)為如下部分:測(cè)試控制臺(tái)、三軸搖擺慣性平臺(tái)和對(duì)準(zhǔn)裝置。軟件包括測(cè)試管理軟件和測(cè)試軟件兩部分。系統(tǒng)結(jié)構(gòu)如圖4所示。
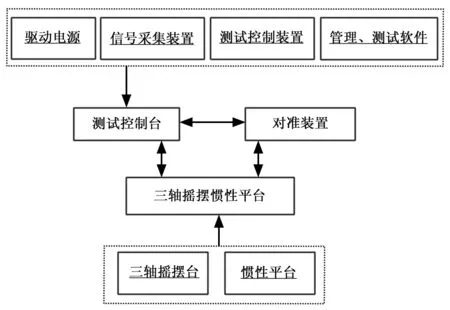
圖4 系統(tǒng)結(jié)構(gòu)設(shè)計(jì)圖
3.1 硬件結(jié)構(gòu)設(shè)計(jì)
測(cè)試控制臺(tái)是整個(gè)測(cè)試系統(tǒng)的核心,運(yùn)行測(cè)試管理軟件和測(cè)試軟件,由對(duì)外接口、控制設(shè)備、供電控制、信號(hào)測(cè)試及人機(jī)交互等幾大部分組成,通過測(cè)試電纜分別與平臺(tái)、搖擺臺(tái)以及對(duì)準(zhǔn)裝置連接。在平臺(tái)測(cè)試過程中,由測(cè)試控制臺(tái)中的嵌入式計(jì)算機(jī)發(fā)出各種控制指令與測(cè)試命令,用于操控測(cè)試進(jìn)程,給系統(tǒng)提供各種工作電源、測(cè)試平臺(tái)數(shù)據(jù)、顯示測(cè)試數(shù)據(jù)和分析測(cè)試結(jié)果。其中供電控制電路將AC220V的輸入電源根據(jù)一定的變換關(guān)系產(chǎn)生所需的各種電壓,驅(qū)動(dòng)平臺(tái)、搖擺臺(tái)工作;同時(shí),給光路對(duì)準(zhǔn)裝置和人機(jī)交互設(shè)備提供電源。
三軸搖擺慣性平臺(tái)為系統(tǒng)的重要部分,平臺(tái)固定于三軸搖擺臺(tái)上。三軸搖擺臺(tái)是機(jī)電設(shè)備,由元器件、控制電機(jī)、角度傳感器、機(jī)械安裝支架等組成,能夠?qū)崿F(xiàn)三個(gè)方向上的轉(zhuǎn)動(dòng)。三軸搖擺臺(tái)采用線性控制理論,使用電流傳感器作為電流反饋器件、增量式光電碼盤作為數(shù)字位置反饋器件、碼盤信號(hào)經(jīng)過F/V變換作為模擬速度反饋以實(shí)現(xiàn)典型的三回路閉環(huán)控制。搖擺臺(tái)三軸均采用直流力矩電機(jī)直接驅(qū)動(dòng),采用光電編碼器為測(cè)角元件,并裝有尋零開關(guān)用于搖擺臺(tái)的尋零操作。借助此搖擺臺(tái),平臺(tái)測(cè)試系統(tǒng)可以提供動(dòng)基座條件下的平臺(tái)測(cè)試。平臺(tái)采用導(dǎo)彈實(shí)裝平臺(tái)設(shè)備,由臺(tái)體組合件、框架系統(tǒng)、基座、安裝架及線路安裝板等組成,在測(cè)試控制臺(tái)的控制下閉合不同的平臺(tái)測(cè)試回路,輸出姿態(tài)角或者加速度信號(hào)給測(cè)試控制臺(tái)采集,配合三軸搖擺臺(tái)完成平臺(tái)的各項(xiàng)測(cè)試。
對(duì)準(zhǔn)裝置通過激光發(fā)光器提供紅色基準(zhǔn)光路,設(shè)置光電傳感器感知反射光位置。對(duì)準(zhǔn)裝置的核心器件是光源收發(fā)器,內(nèi)含1個(gè)激光發(fā)射器和4個(gè)光電開關(guān)。裝置外表面有5個(gè)光線收發(fā)孔,中間為基準(zhǔn)光線發(fā)射孔(對(duì)應(yīng)1個(gè)激光發(fā)射器,半徑為1毫米),左右兩邊各均布2個(gè)孔(半徑為1毫米),分別是正、負(fù)掃瞄接收孔和準(zhǔn)直接收孔(對(duì)應(yīng)4個(gè)光電開關(guān)),激光發(fā)射器、光電開關(guān)與接口導(dǎo)線聯(lián)通。在進(jìn)行平臺(tái)瞄準(zhǔn)測(cè)試時(shí),基準(zhǔn)光線發(fā)射孔里發(fā)出1束基準(zhǔn)激光射向平臺(tái)對(duì)準(zhǔn)軸上的反射棱鏡,當(dāng)平臺(tái)上的方位軸轉(zhuǎn)動(dòng)時(shí),帶動(dòng)方位軸上的反射棱鏡一起轉(zhuǎn)動(dòng),將基準(zhǔn)光線反射到對(duì)準(zhǔn)裝置上相應(yīng)的接收孔里,使接收孔里的光電開關(guān)由斷開到接通,此動(dòng)作信號(hào)通過測(cè)試電纜傳輸?shù)綔y(cè)試控制臺(tái)中,給出平臺(tái)掃瞄或者準(zhǔn)直等信號(hào),完成瞄準(zhǔn)測(cè)試。
3.2 軟件結(jié)構(gòu)設(shè)計(jì)
系統(tǒng)軟件由嵌入式計(jì)算機(jī)和數(shù)據(jù)采集測(cè)試兩個(gè)不同運(yùn)行環(huán)境中的軟件組成。
嵌入式計(jì)算機(jī)軟件作為測(cè)試管理軟件,是整個(gè)軟件結(jié)構(gòu)的中心,包括主控制軟件、通訊軟件和顯示軟件,采用了層次化、結(jié)構(gòu)化的程序設(shè)計(jì)方法。軟件采用MCGS嵌入版組態(tài)軟件操作系統(tǒng),開發(fā)平臺(tái)采用Visual C++ 7.0。數(shù)據(jù)采集測(cè)試軟件實(shí)現(xiàn)平臺(tái)具體信號(hào)的采集與測(cè)試,以用戶管理接口為主線程,將指令接收、實(shí)時(shí)采集、數(shù)據(jù)存儲(chǔ)設(shè)定為子線程,在嵌入式計(jì)算機(jī)的控制下采集數(shù)據(jù),通過串口通訊把測(cè)試結(jié)果傳送給嵌入式計(jì)算機(jī)進(jìn)行可視化顯示。
4 試驗(yàn)結(jié)果與分析
為了驗(yàn)證設(shè)計(jì)的平臺(tái)測(cè)試系統(tǒng)的測(cè)試效果,進(jìn)行驗(yàn)證性測(cè)試。連接好設(shè)備間電纜,啟動(dòng)測(cè)試控制臺(tái)、三軸搖擺慣性平臺(tái),登錄用戶界面,選擇姿態(tài)角測(cè)試項(xiàng)目,系統(tǒng)開始自動(dòng)測(cè)試,通過人機(jī)交互界面查看測(cè)試結(jié)果。為了模擬導(dǎo)彈飛行的空中姿態(tài),測(cè)試控制臺(tái)控制三軸搖擺臺(tái)按照某種搖擺規(guī)律搖擺,使三軸搖擺臺(tái)穩(wěn)定工作于正弦波掃描方式。在控制三軸搖擺臺(tái)動(dòng)作的同時(shí),測(cè)試控制臺(tái)同時(shí)采集平臺(tái)三軸上姿態(tài)角傳感器發(fā)出實(shí)時(shí)姿態(tài)角,并且通過人機(jī)交互界面實(shí)時(shí)顯示結(jié)果。姿態(tài)角測(cè)試界面如圖5所示,測(cè)試界面包括3個(gè)方向陀螺儀、3個(gè)方向姿態(tài)角傳感器、3個(gè)方向姿態(tài)角測(cè)量值、兩個(gè)調(diào)平加速度計(jì)、平臺(tái)瞄準(zhǔn)階段等信息。結(jié)果顯示,測(cè)試系統(tǒng)實(shí)時(shí)測(cè)試出平臺(tái)俯仰角(φ)與偏航角(φ)的數(shù)值,同時(shí)也顯示了俯仰姿態(tài)角傳感器與偏航姿態(tài)角傳感器處于工作狀態(tài),實(shí)現(xiàn)了平臺(tái)姿態(tài)角的測(cè)試功能。
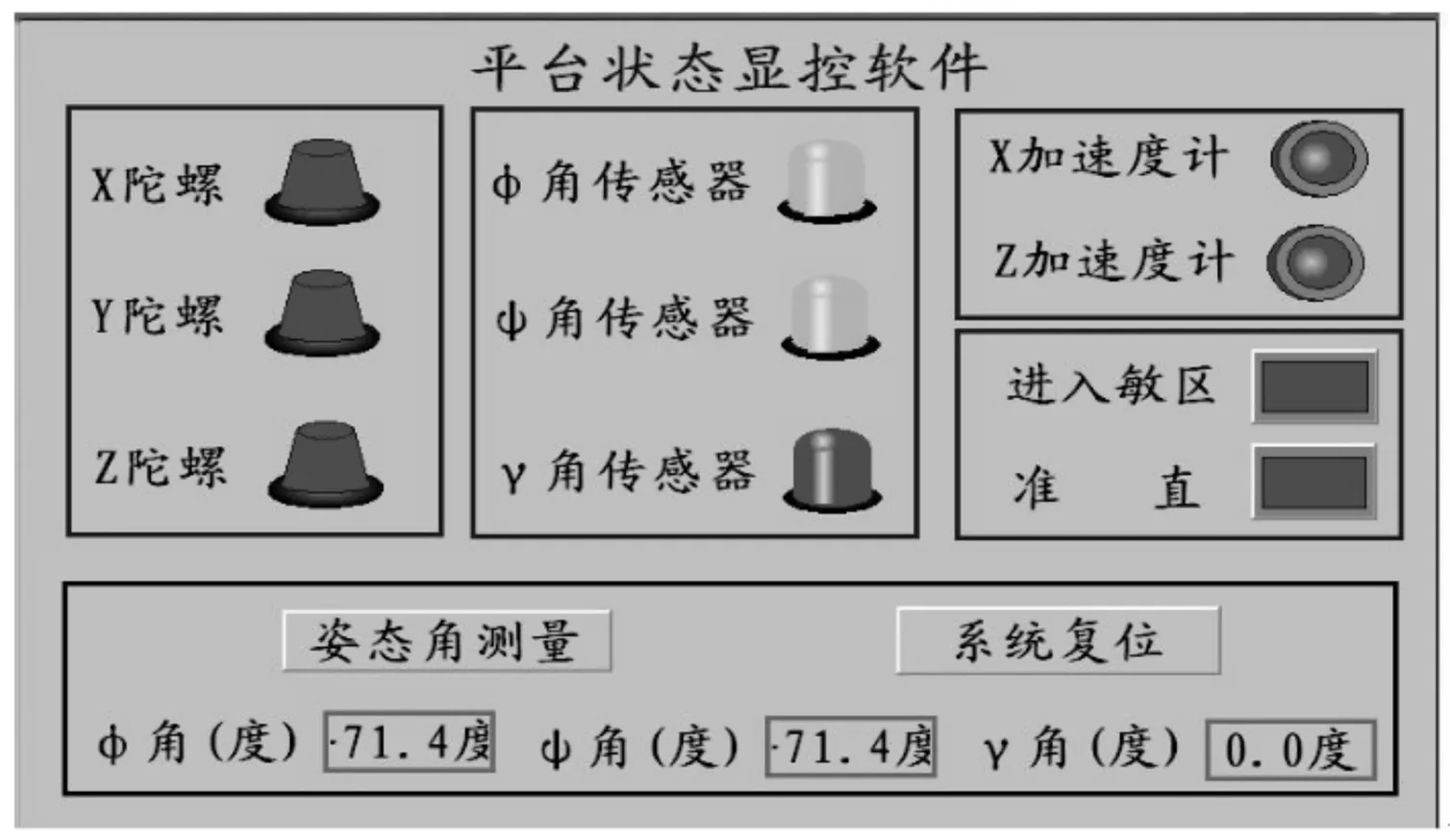
圖5 平臺(tái)姿態(tài)角測(cè)試界面
5 結(jié)論
為了滿足導(dǎo)彈平臺(tái)測(cè)試的需要,本文將UML建模方法應(yīng)用于導(dǎo)彈平臺(tái)測(cè)試系統(tǒng)設(shè)計(jì),在分析系統(tǒng)工作流程的基礎(chǔ)上,構(gòu)建了系統(tǒng)需求描述模型、結(jié)構(gòu)模型和行為描述模型,并對(duì)系統(tǒng)的結(jié)構(gòu)及實(shí)體布置關(guān)系進(jìn)行了設(shè)計(jì),有效提高了系統(tǒng)設(shè)計(jì)效率。設(shè)計(jì)出來的系統(tǒng)在實(shí)用性的基礎(chǔ)上,還具有復(fù)用性及拓展性,能對(duì)其他多種型號(hào)導(dǎo)彈平臺(tái)的性能參數(shù)進(jìn)行測(cè)試。平臺(tái)工作過程轉(zhuǎn)化為測(cè)試控制模型是系統(tǒng)研制中的關(guān)鍵環(huán)節(jié),尤其是測(cè)試控制模型應(yīng)該具有可擴(kuò)展性,這一方面的具體設(shè)計(jì)工作還有待進(jìn)一步研究。
[1] 翟兆松,毛端海,李世平.慣性平臺(tái)防倒臺(tái)保護(hù)電路設(shè)計(jì)[J].電子科技,2010,23(11):77-79.
[2] 吳雙磊,劉潔瑜,盛立昊,等.基于PSD的平臺(tái)動(dòng)態(tài)漂移測(cè)試新方法[J].計(jì)算機(jī)測(cè)量與控制,2013,21(9):2394-2396.
[3] 高迎彬,胡昌華,何華鋒. 基于FPGA的慣性平臺(tái) 嵌入式調(diào)平系統(tǒng)設(shè)計(jì)[J].電子測(cè)量技術(shù),2011,34(6):60-63.
[4] 張建民,韓根甲.下視慣性平臺(tái)瞄準(zhǔn)線穩(wěn)定的數(shù)理分析[J]. 光學(xué)與光電技術(shù),2004,2(6):55-58.
[5] 劉 靜,朱志剛.搖擺條件下慣性平臺(tái)系統(tǒng)動(dòng)態(tài)特性分析[J].宇航學(xué)報(bào),2011,32(9):1878-1883.
[6] James Rumbaugh, Ivar Jacobson, Grady Booch. UML參考手冊(cè)[M].北京:機(jī)械工業(yè)出版社,2001.
[7] 李 欣,賈 炯. 用例建模技術(shù)在需求獲取中的應(yīng)用研究[J].浙江師范大學(xué)學(xué)報(bào):自然科學(xué)版,2004,27(3):251-253.
Research of Design Method for Misssle Platform Test System
Zhang Lei, Xiao Fan, Liu Bingjie
(Third Dep.,Navy Submarine Academy,Qingdao 266019,China)
In the process of model design for missile platform test system by modeling technology, the key is to realize the requirements description model design, structure model design and behavior model design of test system.Firstly,the working procedure of test system is analyzed. Then, the model design of test system are carried by UML(unified modeling language) modeling technology. The requirements description model of system is showed by using decomposition of use-case diagram, the structure model of system is built on the analysis of structure system and relevance relation. The behavior model of system is constructed by using sequence diagram. At last, the system structure and arrangement relation of test system are designed based on above-mentioned model design.This design is applied to real developing for misssle platform test system and all test function is realized. The result shows that this modeling method can improves design efficiency, and the test system possesses reuseability and expansibility also based on the practicability.
missile platform;test system;UML;model
2016-11-22;
2016-12-15。
張 磊(1973-),男,山東廣饒人,碩士,講師,主要從事導(dǎo)彈控制、測(cè)試方向的研究。
1671-4598(2017)05-0126-03
10.16526/j.cnki.11-4762/tp.2017.05.035
TJ762.4
A
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16

- 計(jì)算機(jī)測(cè)量與控制的其它文章
- 2kV高穩(wěn)定度高壓脈沖電源設(shè)計(jì)
- 基于藍(lán)牙4.0的微型核輻射劑量計(jì)設(shè)計(jì)
- 基于對(duì)照區(qū)設(shè)置的結(jié)化霜曲線去除霧噪聲的方法實(shí)現(xiàn)
- 醫(yī)院網(wǎng)環(huán)境數(shù)據(jù)中心機(jī)房網(wǎng)絡(luò)設(shè)計(jì)
- 機(jī)載多路DVI視頻信號(hào)轉(zhuǎn)換器設(shè)計(jì)
- 基于FPGA的激光光束自對(duì)準(zhǔn)電氣自動(dòng)化系統(tǒng)設(shè)計(jì)