基于微動調制的FMCW SAR無源壓制干擾方法
2017-05-24 14:45:31朱啟明強海斌翁海超
計算機測量與控制 2017年5期
朱啟明, 梁 穎, 李 陽, 強海斌, 翁海超
(中國人民解放軍95980部隊,襄陽 441100)
基于微動調制的FMCW SAR無源壓制干擾方法
朱啟明, 梁 穎, 李 陽, 強海斌, 翁海超
(中國人民解放軍95980部隊,襄陽 441100)
調頻連續波(FMCW)合成孔徑雷達(SAR)體積小、重量輕、成本低、功耗低等優點,在無人機等小型飛行平臺中具有較大的應用潛力,對FMCW SAR的干擾也將成為目前干擾技術研究的重點;在構建旋轉微動目標回波模型的基礎上,分析了FMCW SAR旋轉微動目標的干擾特性,并進一步提出了一種基于微動調制的FMCW SAR無源壓制干擾方法;該方法利用旋轉角反射器在距離向和方位向上形成的二維干擾條帶,能夠實現對被掩護目標的有效保護;文章詳細分析了對FMCW SAR實施干擾時旋轉角反射器的參數選擇方法,并利用仿真實驗驗證了理論分析與所提無源壓制干擾方法的有效性。
調頻連續波合成孔徑雷達;旋轉角反射器;無源壓制干擾
0 引言
調頻連續波(frequency modulated continuous wave, FMCW)合成孔徑雷達(synthetic aperture radar, SAR)與傳統的脈沖式SAR相比,具有體積小、重量輕、成本低、功耗低等優勢[1-3],其接收端采用“dechirp”處理體制,回波信號與參考信號進行混頻,產生較小的差頻帶寬,能夠降低對視頻接收通道、后端A/D采集設備和信號處理速度的要求[4]。同時,調頻連續波雷達很大的時寬帶寬積,使其難以被傳統的偵察機截獲,具有良好的低截獲概率[5]。這些特點使其非常適合應用于軍用小型飛行平臺,大大提高了SAR在軍事應用中的作戰能力。世界各國分別對FMCW SAR系統的研制展開研究[6-8],特別的美國Brigham Young大學研制的采用FMCW SAR工作體制的MicroSAR系統重量僅為2 kg[8]。
如何保護己方重要目標不受敵方的SAR識別和提高己方SAR的抗干擾能力,一直是從事干擾技術研究和SAR成像技術研究的重要課題之一。對SAR的無源壓制干擾主要是依靠角反射器或錫箔條等雷達散射面積較大的干擾目標放置在被掩護目標周圍,使被掩護目標淹沒在強干擾目標旁瓣中,以達到干擾的效果。基于微動調制的SAR無源壓制干擾進一步利用了旋轉角反射器旋轉在距離向和方位向上形成的微動干擾條帶,實現對重要目標的有效掩護[9-10]。FMCW SAR信號為保證較低的發射功率,通常設置較長的脈沖持續時間,因此在FMCW SAR信號處理中,通常需考慮載機連續運動引起的距離變化,因此與傳統的脈沖式SAR信號處理模式不同。本文通過構建FMCW SAR旋轉目標回波模型,首先分析了旋轉目標對FMCW SAR成像的干擾特性,并對旋轉角反射器的參數選擇進行了論述,提出一種利用旋轉角反射器實現FMCW SAR無源壓制干擾的方法。最后的仿真實驗驗證了理論分析與所提無源壓制干擾方法的有效性。
1 干擾信號模型
FMCW SAR成像幾何模型如圖1所示,載機沿x軸方向以速度v飛行,飛行高度為h。假設場景方位向中心處存在一旋轉目標點P,旋轉半徑為r,旋轉頻率為fP(角頻率ωP=2πfP),初始相位為θ0,旋轉中心與雷達平臺之間的距離為R0。

圖1 FMCW SAR成像幾何模型
由于FMCW信號是在一個脈沖持續時間內連續的發射信號,且脈沖持續時間較長,傳統的脈沖式SAR所采用的“一步一停”工作模式不再適用,需考慮平臺連續運動引起的距離變化。因此,旋轉點P與載機之間的瞬時斜距應表示為:
(1)
其中:t=tk+tm為全時間,tk和tm分別表示快時間和慢時間。將式(1)進一步展開為關于快時間tk的一次項:
(2)
(3)
式(2)中第二項為旋轉點在脈沖持續時間內引起的距離變化;第三項為載機連續運動引起的脈內多普勒頻移項,在后續的處理可通過在方位多普勒頻域構造多普勒頻移補償函數對該項進行補償。
雷達發射FMCW信號,旋轉點回波信號經去調頻處理后,差頻信號可表示為:
(4)
其中:σP為旋轉點P散射系數,c表示光速,λ為載波波長,RΔ(t)=R(t)-Rref,Rref為參考距離。是(4)中最后一項為剩余視頻相位(RVP)項,是FMCWSAR采用去調頻處理所產生的特有的相位項,對該項的補償可在方位多普勒頻域完成[8]。本文在后續的分析處理中忽略了該項的影響,將式(2)帶入上式得:
(5)
其中,第一個指數項為距離成像因子;第二個指數項為方位向成像因子;第三個指數項為載機連續運動引起的多普勒頻移項,該項為快時間和慢時間的耦合項,對多普勒頻移的補償,需在方位多普勒頻域完成。對式(5)進行方位向傅里葉變換,并構造多普勒頻移補償函數完成補償:
HD(tk,fa)=exp(-j2πfatk)
(6)
其中:fa表示方位多普勒頻率。經多普勒頻移補償后回波信號變換到二維時域,表達式為:
(7)
2 干擾特性分析及參數選擇
本文以改進的距離-多普勒(R-D)算法[10]為例,對FMCWSAR旋轉目標的干擾特性進行分析。首先進行距離壓縮處理,即對式(7)進行快時間的傅里葉變換得:
(8)
(9)

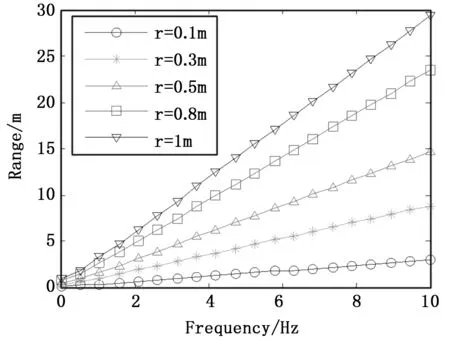
圖2 旋轉頻率與等效旋轉半徑的關系曲線
對于靜止點目標,回波信號經距離壓縮后在距離-慢時間譜圖表現為一條線,經距離徙動校正后,這條線被校正在同一個距離單元內,對其進行方位脈壓處理即可獲得該靜止點的二維成像結果。但是旋轉點回波受旋轉點的影響,使回波產生了正弦相位調制,經方位脈壓處理后其回波信號表達式為:
(10)

(11)
由式(10)可知,旋轉點目標回波經方位脈壓處理后,表現為一系列窄脈沖信號的疊加,相鄰窄脈沖信號之間的時間間隔為:
(12)
窄脈沖信號的數量,即m的取值范圍受Bessel函數Jm(B)的影響。對式(11)作變量代換x=-2πx′,得:
(13)
為避免產生混淆,式(13)仍寫為:
(14)
由式(14)可知,Jm(B)實際為一正弦調頻信號的傅里葉變換,其頻帶寬度即為m的取值范圍,因此m的取值范圍為:
m∈(-B,B)
(15)


圖3 Jm(B)幅度變化圖
根據以上旋轉目標對FMCWSAR的干擾特性分析,可采用旋轉角反射器實施無源壓制干擾,通過角反射器在距離向和方位向形成的二維條帶實現無源壓制干擾。方位向主要是旋轉角反射器回波經方位脈壓處理后形成的窄脈沖實現干擾,窄脈沖間隔決定了方位向干擾效果。要使窄脈沖覆蓋整個方位向條帶,即Δx<ρa,ρa為方位向分辨率,則角反射器的旋轉頻率應滿足:
(16)
方位向干擾范圍由窄脈沖間隔和窄脈沖個數決定,根據窄脈沖間隔計算在方位向干擾范圍為La時所需的方位向窄脈沖個數為:
(17)
其中:Ts為合成孔徑時間。由于窄脈沖個數滿足以下關系式:
(18)
其中:floor{·}表示向下取整。由此可確定旋轉角反射器的旋轉半徑為:
(19)

(20)
3 計算機仿真驗證
設FMCWSAR系統載頻為35GHz,帶寬為300MHz,脈沖持續時間為1ms,系統采樣頻率為1.25MHz。FMCWSAR工作在正側視條帶模式,載機飛行速度為200m/s,場景中心點距離載機距離為20km,合成孔徑時間為0.86s,距離分辨率及方位分辨率均為0.5m。
3.1 干擾特性分析
首先對旋轉目標的干擾特性進行仿真分析,旋轉點參數設置如表1所示。

表1 旋轉角反射器參數設置
圖4給出了在不同參數設置情況下采用R-D算法FMCWSAR旋轉目標二維成像結果。在參數1設置條件下,5個旋轉角反射器相應的等效旋轉半徑依次為:0.012m,0.025m,0.037m,0.050m,0.062m,均小于距離分辨率,因此其二維成像結果表現為沿方位向的直線。5個旋轉角反射器的旋轉頻率相同,即二維成像結果中窄脈沖間隔相同,而旋轉半徑依次增大,相應地窄脈沖個數依次增大,在二維成像結果中表現為干擾調大依次增加;在參數2設置條件下,雖然5個角反射器的旋轉半徑相同,但是旋轉頻率各不相同,其等效旋轉半徑也不同,分別為:0.25m,0.35m,0.76m,2.94m,5.87m。1、2號旋轉角反射器的等效旋轉半徑仍小于距離分辨率,因此其二維成像結果仍表現為沿方位向的直線,而3~5號旋轉角反射器的等效旋轉半徑大于距離分辨率,其二維成像結果表現為沿方位向的條帶形式,同時旋轉頻率大的其窄脈沖間隔大。
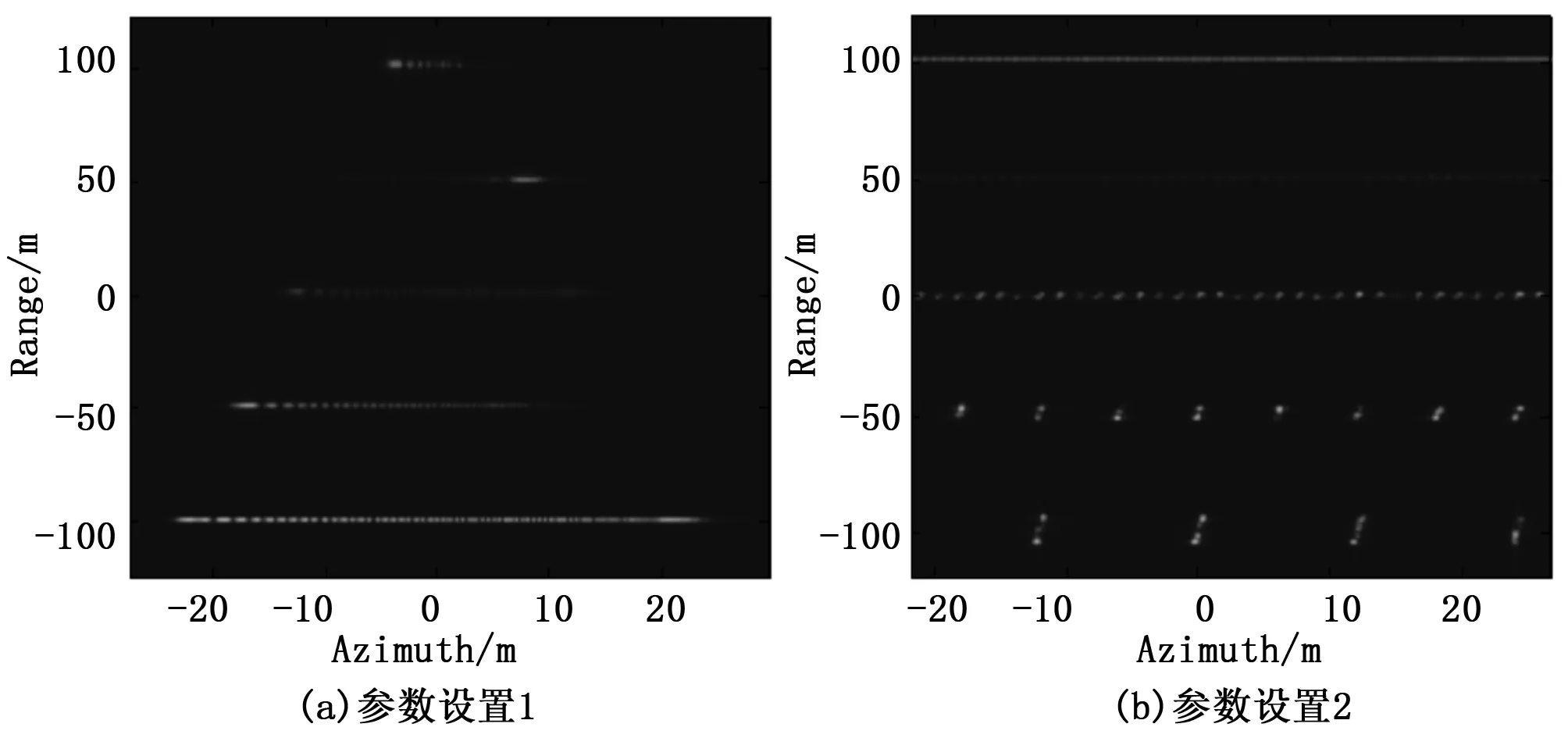
圖4 成像特性分析
3.2 干擾效果分析
掩護模型采用66點飛機散射點模型為例,如圖5(a)所示,在不存在干擾條件下其二維成像結果如圖5(b)所示。
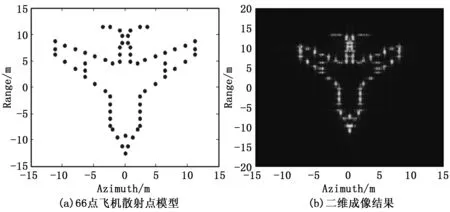
圖5 掩護目標模型
根據理論分析結果及掩護模型的尺寸,可設置不同的角反射器參數對其進行掩護,旋轉角反射器參數設置如表2所示,旋轉角反射器的散射系數是目標點散射系數的30倍。圖6給出了不同旋轉角反射器參數設置情況下,對FMCWSAR實施無源壓制干擾的二維成像結果。

表2 旋轉角反射器參數設置
圖6給出了不同旋轉角反射器參數設置情況下,對FMCW SAR實施無源壓制干擾的二維成像結果。不同的參數設置均能使距離向干擾條帶覆蓋整個被掩護目標,隨著旋轉頻率的降低,方位向形成的窄脈沖間隔不斷減小,因此其在方位向干擾效果也不斷變好。在參數設置4的情況下,飛機模型已完全淹沒在旋轉角反射器的回波調制噪聲中。

圖6 干擾結果
在實際應用中,可根據被掩護目標的具體情況,選擇適當的角反射器參數對FMCW SAR系統進行無源壓制干擾。
4 結論
FMCW SAR由于其自身的優越性,必將受到越來越廣泛的關注,而對FMCW SAR的干擾也將成為干擾技術研究領域的研究熱點之一。本文通過分析旋轉目標對FMCW SAR的干擾特性,提出了一種基于旋轉微動調制的FMCW SAR無源壓制干擾方法。通過旋轉角反射器在距離向和方位向形成的二維干擾條帶,實現了對重要目標點有效掩護。仿真實驗驗證了理論分析結果與所提無源壓制干擾方法的有效性。
[1] Meta A and Hoogeboom P. Development of signal processing algorithms for high resolution airborne millimeter wave FMCW SAR[A]. Rroc. IEEE Int. Radar Conf.’ 05[C]. Arlington, U.S.A, 2005: 326-331.
[2] Meta A, Hoogeboom P and Ligthart L P. Signal processing for FMCW SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(11): 3519-3532.
[3] Wang R, Luo Y, Deng Y, et al. Motion compensation for high-resolution automobile FMCW SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(5): 1157-1161.
[4] Liu Y, Deng Y, Wang R, et al. Efficient and precise frequency-modulated continuous wave synthetic aperture radar raw signal simulation approach for extended scenes[J]. IET Radar Sonar Navig., 2012, 6(9): 858-866.
[5] Adve R. Bistatic FMCW SAR signal model and imaging approach[J]. IEEE Transactions on Aerospace and Electronic Systems. 2013, 49(3): 2017-2028.
[6] M Edrich. Design overview and flight test results of the miniaturized SAR sensor MISAR[A]. Proc. EuRAD’04[C]. Amsterdam, the Netherlands, 2004: 205-208.
[7] Duersch M I. BYU. Micro-SAR: A very small low-power LFM-CW synthetic aperture radar[Z]. Brigham Young University, 2004.
[8] R Wang, OLoffeld, H Nies, et al. Focus FMCW SAR Data Using the Wavenumber Domain Algorithm[J]. IEEE Trans on GRS, 2010, 48(4): 2109-2118.
[9] 劉 陽, 王雪松. 微動特性干擾對基于FrFT的多孔徑SAR/GMTI的效果分析[J]. 電子學報, 2011, 9(9): 2039-2045.
[10] 韓國強, 馬效尊, 邢世其,等. 對SAR微動調制干擾效果仿真分析[J]. 現代防御技術, 2013, 41(1): 176-182.
[11] 梁 毅. 調頻連續波SAR信號處理[D]. 西安: 西安電子科技大學, 2009.
[12] Rigling B D. Image-quality focusing of rotating SAR targets[J]. IEEE Geosci. Remote Sens.Lett., 2008, 5(4): 750-754.
Passive Barrage Jamming Method for FMCW SAR Based on Micro Motion Modulation
Zhu Qiming, Liang Ying, Li Yang, Qiang Haibin, Weng Haichao
( Unit 95980 of PLA, Xiangyang 441100,China)
The frequency modulated continuous wave (FMCW) synthetic aperture radar (SAR) has the properties of compact size, lightweight, low cost and low power dissipation, which provides great potential in the application of small unmanned aerial vehicle (UAV) platforms. The imaging characteristic of rotating target for FMCW SAR is analysed based on the construction of received signal model. In development, a passive barrage jamming method for FMCW SAR based on micro motion modulation is proposed. This method makes use of the rotating angular reflectors to form jamming strips in range and azimuth 2D direction, and then the target screened is protected effectively. The choice of the parameters of rotating angular reflectors is discussed in detail. Finally some simulations are given for validating the theoretical derivation and the effectiveness of the proposed passive barrage jamming method.
FMCW SAR; rotating angular reflector; passive barrage jamming
2016-10-16;
2016-12-15。
朱啟明(1986-),男,湖北襄陽人,碩士研究生,主要從事計算機科學與應用方向的研究。
梁 穎(1986-),男,河北唐山人,工程師,博士,主要從事信號處理方向的研究。
1671-4598(2017)05-0155-03
10.16526/j.cnki.11-4762/tp.2017.05.043
TN957
A
