基于路況預測的PHEV能量管理策略
2017-05-24 14:45:32馬靈靈付主木李東衛
計算機測量與控制 2017年5期
馬靈靈,付主木,李東衛
(河南科技大學 信息工程學院,河南 洛陽 471023)
基于路況預測的PHEV能量管理策略
馬靈靈,付主木,李東衛
(河南科技大學 信息工程學院,河南 洛陽 471023)
為了提高插電式混合動力汽車(plug-inhybridelectricvehicle,PHEV)的燃油經濟性,減少排放,提出了基于路況預測的PHEV能量管理策略;首先,建立PHEV系統結構并在此基礎上依據動力電池SOC(Stateofcharge)變化規律定義了3種PHEV基本工作模式;然后,設計路況識別模糊控制器對當前行駛路況進行識別并預測;最后,根據預測的路況類型結合合理規劃的動力電池SOC的曲線約束,制定PHEV能量管理策略;仿真結果表明,該能量管理策略能夠較好的使動力電池SOC保持在設定的參考軌跡附近,提高燃油經濟性,減少排放。
插電式混合動力汽車;行駛路況識別;SOC參考軌跡;能量管理
0 引言
插電式混合動力汽車(plug-in hybrid electric vehicle, PHEV)結合了傳統內燃機汽車和純電動汽車的優點,既可以使用外部電網充電,又可以高效地利用燃油能量,實現更長的純電動續駛里程,減少汽車廢氣排放,成為國內外新能源汽車研發的熱點[1-3]。制定合理的PHEV能量管理策略,有效控制汽車的工作模式,提高整車燃油經濟性,減少排放,是汽車企業和研究機構研究的核心技術之一。
汽車的行駛路況是PHEV能量管理策略制定的必要條件,行駛路況的不同直接影響控制策略的發揮,進而影響整車的燃油經濟性和排放性[4-5]。因此,對汽車行駛路況進行分類,設計與各路況相應的能量管理策略,對提高汽車燃油經濟性、降低尾氣排放意義重大。目前結合汽車行駛路況識別的能量管理策略方面的研究很多,林歆悠等[6]選取了四種典型的城市循環路況,采用學習向量量化神經網絡模型的方法,對各路況的特征參數進行訓練學習,從而實現對行駛路況的識別。彭志遠[7]選取20個典型循環路況,對各路況下能量管理策略中的關鍵參數,利用粒子群算法進行優化,并根據優化結果建立數據庫。周楠等[8]采用簡化的神經網絡對實時車速進行采集分析,運行一段時間后,自動尋找與之相近的標準循環工況,控制參數也相應轉化為標準工況下已優化參數。現有的結合行駛路況識別的能量管理策略,對汽車整個行駛里程的全局最優性鮮有考慮。
基于此,本文根據車速與時間關系,提取路況信息特征參數,設計路況識別模糊控制器,結合全局最優的動力電池SOC(State of charge)參考曲線及預測得到的路況類型制定能量管理策略,并進行了仿真驗證。
1 PHEV結構及工作模式
1.1 PHEV系統結構
插電式混合動力汽車(PHEV)的系統結構決定著車輛工作模式和整車的節能減排能力,也是PHEV系統參數匹配、能量管理策略開發和優化的前提。下圖1為本文中用到的PHEV車型的系統結構。

圖1 PHEV車型系統結構
該插電式混合動力系統采用單軸混聯式動力結構,主要由發動機、ISG電機、離合器、主驅動電機、動力電池和主減速器組成,該結構的主要特點是:ISG電機和發動機是連在一起的,發動機的驅動轉矩通過離合器與主驅動電機的驅動轉矩耦合。ISG電機不直接驅動車輛,主要用于發動機的快速啟動和發電。通過離合器的接合與分離實現串并聯結構的切換,從而更好地發揮混合動力系統節能減排的潛力。利用單軸實現驅動轉矩的耦合,不需要復雜的動力耦合裝置,結構簡單、容易控制。
1.2 PHEV工作模式分析
依據動力電池SOC變化規律,將PHEV基本運行模式定義為以下3種模式:純電動驅動模式(Pure Electric Driving, PED)、混合驅動電量消耗模式(Hybrid Driving Charge Depleting, HDCD)和混合驅動電量維持模式(Hybrid Driving Charge Sustaining, HDCS)。
如圖2所示,PED模式和HDCD模式下動力電池SOC都呈下降趨勢,只是HDCD模式下動力電池SOC下降比PED模式下慢。HDCS模式下,動力電池SOC變化軌跡則是在狹小區域內上下波動,這與傳統混合動力汽車的控制策略效果相似,電機和發動機聯合工作,使動力電池SOC保持在某一設定水平。

圖2 三種運行模式的SOC變化軌跡對比
1.2.1 純電動模式
在純電動模式下,電能作為唯一的能量源驅動車輛行駛。發動機和ISG電機不工作,離合器處于分離狀態,主驅動電機提供全部需求動力。轉矩分配策略如下式:
(1)
式中,Te為發動機轉矩,TISG為ISG電機轉矩,Tm為主驅動電機轉矩,Treq為整車的需求功率。
1.2.2 混合驅動電量消耗模式
在混合驅動電量消耗模式下,ISG電機不工作,由發動機和動力電池共同提供整車的動力需求。其中,主驅動電機提供車輛的主要驅動轉矩,同時依據動力電池SOC狀態進行再生制動,將再生制動過程中產生的電能回充給動力電池。發動機作為動力輔助單元工作在高效區,來配合主驅動電機為車輛提供驅動轉矩。
離合器狀態用Sclu表示,Sclu=0表示離合器分離,Sclu=1表示離合器結合;發動機工作狀態用Se表示,Se=0表示發動機關閉,Se=1表示發動機啟動。
(2)
式中,nclu_eng_HDCD為HDCD模式下離合器的結合轉速,Te_opt_min為發動機高效工作區輸出轉矩的下限。電量消耗模式下,轉矩分配策略如式(3)所示:
(3)
式中,Te_opt_max為發動機在高效工作區時輸出轉矩的上限。
1.2.3 混合驅動電量維持模式
在電量維持模式下,發動機、ISG電機和主驅動電機三個動力源協同工作驅動車輛行駛。此時,燃油作為車輛唯一的能量源,轉矩分配策略與常規混合動力相似。需求動力主要由發動機提供,電機和動力電池組成的電驅動系統,用來平衡功率需求,以提高混合動力系統的工作效率。SOC維持在特定范圍內,整體呈水平走勢。發動機及離合器狀態如式(4)所示:
(4)
式中,nclu_eng_HDCS為HDCD模式下離合器結合轉速。
電量維持模式下,系統轉矩分配策略如式(5)所示:
(5)
式中,Te_opt是發電工作點對應發動機輸出轉矩;Te_max和Te_min分別是電量維持模式下發動機預設工作區的上限和下限。
汽車行駛時,根據路況的變化,需要合理地切換運行模式,在保證汽車動力性的前提下,以減少燃油消耗。
2 路況識別模糊控制器設計
2.1 路況分類
忽略天氣條件對駕駛路況的影響,根據道路特征情況,把車輛的行駛路況分為3類:城市路況,郊區路況,高速路路況。
(1)城市路況,交通信號燈較多,車輛數目多,交通流量大,車速較低,道路經常出現擁堵情況,車輛頻繁起停,怠速時間比大,平均車速較低,最高車速不超過70km/h。(2)郊區路況,道路出現擁擠狀況相比城市路況少,道路相對比較通暢,怠速時間比小,車輛通常以中速行駛。(3)高速路況,偶爾會因突發事件導致擁堵,但怠速時間比很小,平均車速較高,最低車速不得低于60km/h,最高車速不得超過120km/h。
2.2 特征參數提取
從時間窗口ΔT內的速度曲線中提取有效的特征參數。特征參數應盡可能少,要能夠快速,精確地反應出路況類型。結合實際交通規則,選取平均車速,最大車速和怠速百分比作為路況識別的特征參數。
文中利用當前時刻前ΔT的速度曲線預測當前時刻后Δt的路況類型。路況預測的準確度與時間窗口ΔT和時間間隔Δt的取值有很大關系。ΔT選擇太小,則可用的歷史路況信息少,太大則會出現多余的歷史路況信息導致計算量變大。Δt選擇太小,則需要頻繁地運行路況預測程序,太大則路況預測的靈敏度及準確性受到影響[9]。經過反復測試,本文選用ΔT=120和Δt=3。特征參數的具體計算公式如式(6)所示:
(6)
式中,VM為最大速度,ν為平均速度,r為怠速時間比,k為總采集次數,ν(i)為每一個時間間隔內的平均速度,t(i)為速度為0的時間。
2.3 路況識別模糊控制器設計
特征參數與行駛路況之間存在復雜的聯系,模糊控制具有非常高的自適應性和魯棒性,因此選用模糊控制進行模式識別。制定的模糊控制算法包括三個輸入量、一個輸出量。平均車速ν、怠速時間比r、最大速度VM作為輸入量,路況類型為輸出量。
路況識別模糊控制器總體思路如圖3所示。
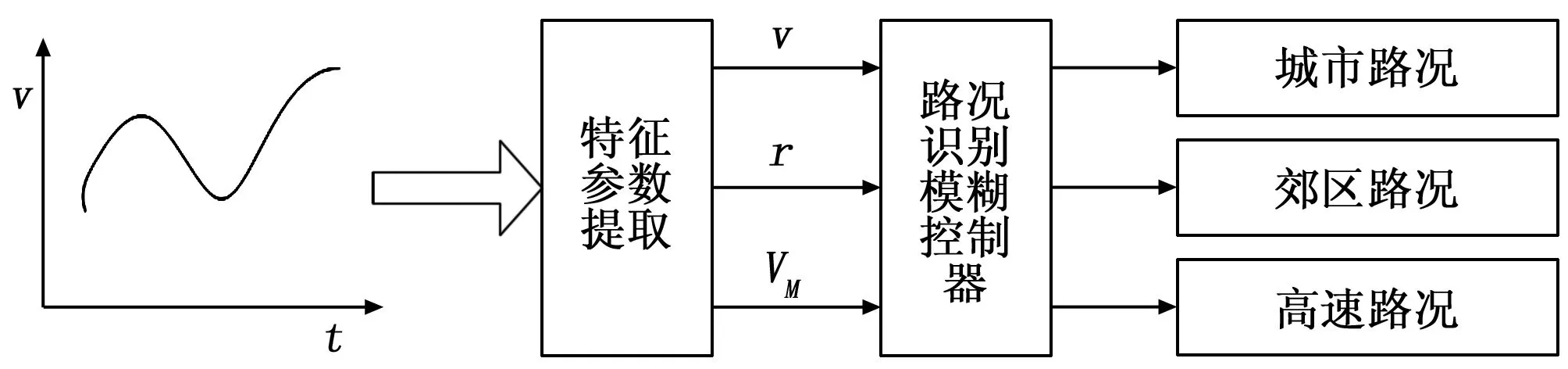
圖3 路況識別模糊控制器
1)設定輸入特征參數的隸屬度函數,平均車速、怠速時間比、最大速度三個特征參數的隸屬度函數如圖4所示,三個輸入量分別有“S”、“M”、“B”三個模糊子集,分別代表小、中、大。

圖4 平均車速、怠速時間比、最大速度的隸屬度函數
2)設定路況識別的模糊推理規則如表1所示。輸出量為“1”、“2”、“3”,分別代表城市路況,郊區路況、高速路況。
3)輸出路況類型的隸屬度函數,路況識別模糊控制器的輸出結果為三種路況,定義區間{0,1}為城市路況,區間{1,2}為郊區路況,區間{2,3}為高速路況。經適當模糊化處理后得到輸出結果的隸屬度函數如圖5所示。
3 基于路況預測的PHEV能量管理策略設計
行駛路況對車輛的燃油經濟性影響很大,同時動力電池中來自電網的電能應用方式也會對燃油經濟性有一定影響。為了充分發揮PHEV電池容量大的優勢,合理使用動力電池的外充電能,文中提出根據不同的路況類型,以規劃的動力電池SOC曲線為約束,制定PHEV能量管理策略,以期達到全局最優的燃油經濟性。

圖5 識別結果隸屬度函數
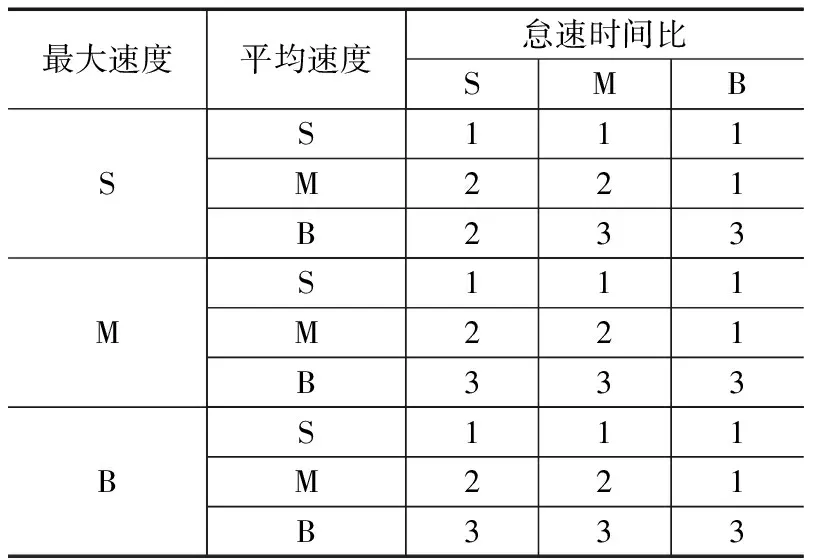
最大速度平均速度怠速時間比SMBSS111M221B233MS111M221B333BS111M221B333
3.1 動力電池SOC軌跡規劃
如何合理的規劃動力電池中電量的使用,關系到PHEV能量管理的全局最優性,所以動力電池SOC軌跡的合理規劃很重要。在離線情況下,對不同的行駛里程、不同的行駛路況采用動態規劃算法,得到全局最優的動力電池SOC變化軌跡。從結果中發現,動力電池SOC的下降趨勢相同,大致呈線性衰減,即隨著行駛里程的增加,動力電池SOC從最大值近似均勻的減小到最小限值。

圖6 動力電池SOC的計算
為了便于實際應用,把最優的SOC變化軌跡的線性擬合線,作為SOC參考曲線。
SOC(K)=λ(K-S)+SOCl
(7)
式中,SOC(K)是行駛距離為K時的SOC值,λ為動力電池SOC理論斜率,SOCl為行程終點時動力電池SOC值。
3.2PHEV能量管理策略
根據預測得到的路況類型,結合合理規劃的SOC參考曲線,制定PHEV能量管理策略。
圖7中,ΔSOC是當前SOC值與理論SOC值的變化量,將理論SOC值與實際SOC的最大值設定為d和h,具體計算如式(9)所示:
ΔSOC=SOCt-SOCp
(9)
式中,SOCt是理論SOC值,SOCp是實際SOC值,d和h都是設定的ΔSOC限值,其中h>d。
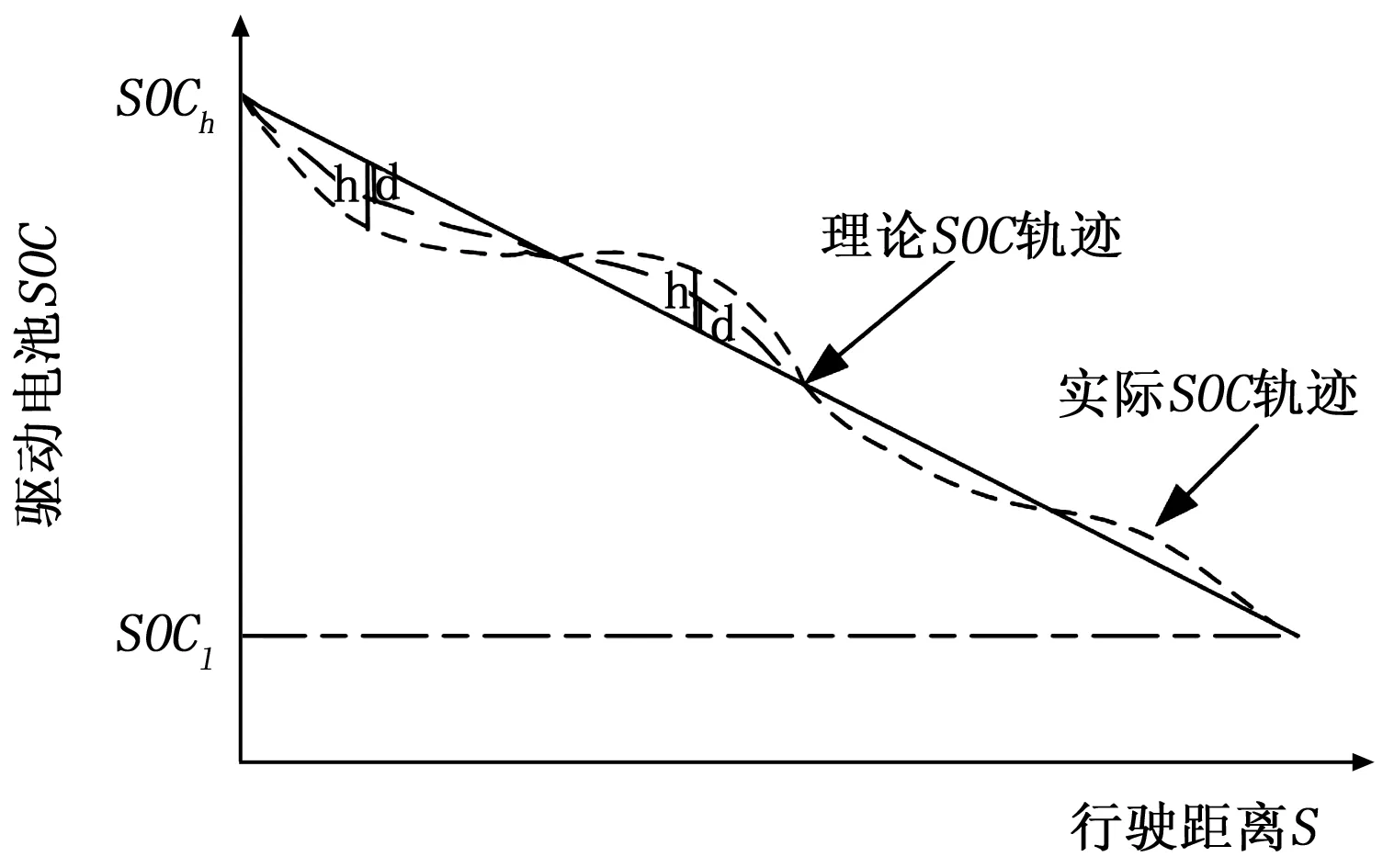
圖7 理論SOC參考軌跡
在城市路況下,交通流量大,道路經常出現擁堵,怠速時間比較大,車輛的怠速損失和以制動形式消耗的車輛動能相當高,發動機工作效率不高,且尾氣污染嚴重,純電動行駛可以降低城市的污染程度。因此,純電動驅動模式是最理想的工作模式。
通過路況預測得知前方是城市路況時,切換到純電驅動模式。如果-h<ΔSOC<-d,則切換到混合驅動電量消耗模式。如果ΔSOC≤-h,則切換到混合驅動電量維持模式。如框圖8所示。

圖8 城市路況下能量管理策略流程圖
在郊區路況下,怠速時間比少,道路相對比較通暢,車輛通常以中速行駛,這種路況下混合驅動電量消耗模式比較適宜。發動機作為動力輔助單元工作在高效區來配合主驅動電機為車輛提供驅動轉矩,車輛運行過程中動力電池
SOC
整體呈下降態勢,但下降速度較純電動模式下慢。
通過路況預測得知當前路況是郊區路況時,切換到混合驅動電量消耗模式,如果ΔSOC≥h,則切換到純電動驅動模式。如果ΔSOC≤-h,則切換到混合驅動電量維持模式。如框圖9所示。
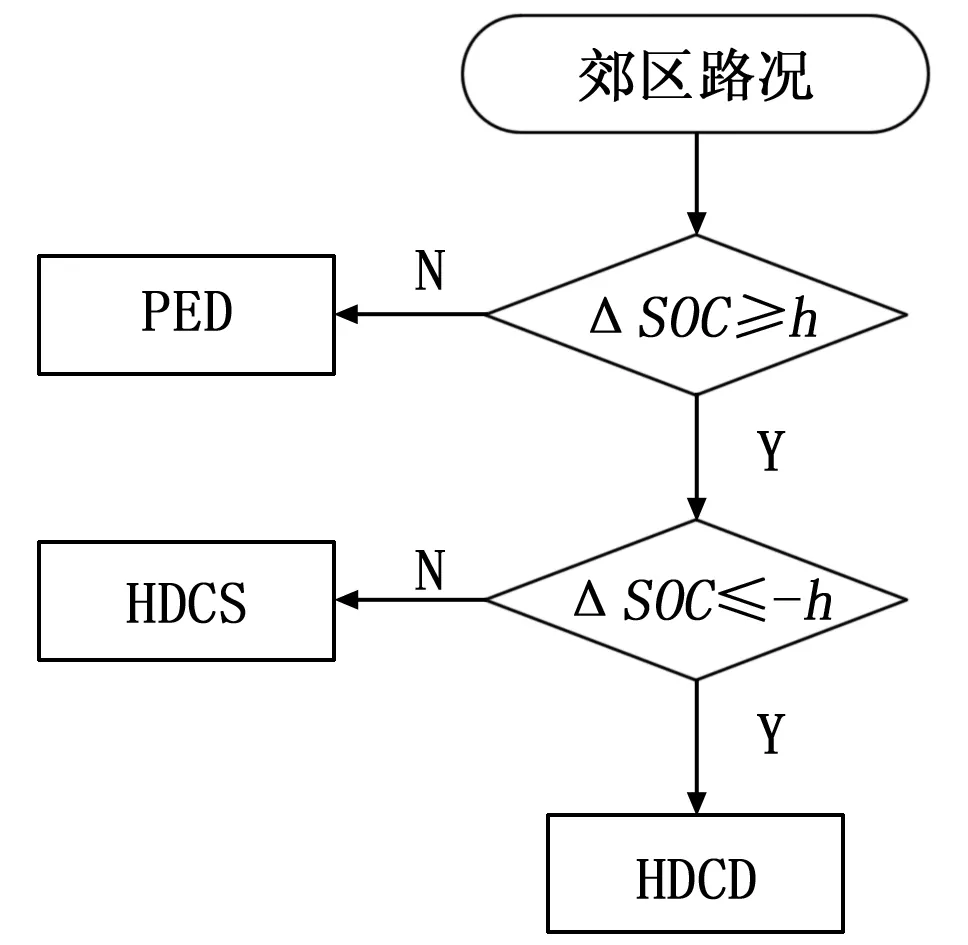
圖9 郊區路況下能量管理策略流程圖
在高速路況下,怠速時間比很小,平均車速較大,車輛的換擋頻率和制動頻率最低,因而怠速損失和以制動形式消耗的車輛動能很小。這種路況下混合驅動電量維持模式最為合適。車輛的動力需求主要由發動機提供,電機和動力電池成的電驅動系統,作為功率平衡器對車輛功率需求,進行削峰填谷,以提高混合動力系統的工作效率。發動機效率較高,電池電量不足時可以為電池充電。
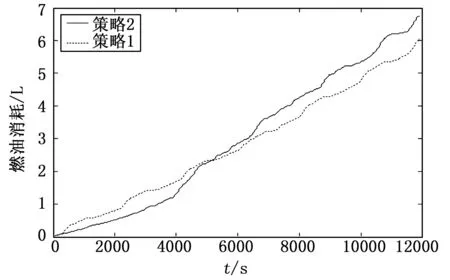
通過路況預測得知當前路況是高速路況時,切換到混合驅動電量維持模式。如果d<ΔSOC 圖10 高速路況下能量管理策略流程圖 在ADVISOR仿真平臺中搭建后向仿真模型,結合在Matlab/simulink環境下搭建的控制策略,進行仿真分析驗證基于路況預測的PHEV能量管理策略的可行性。 為了驗證路況識別模糊控制器的可行性,隨機選用仿真軟件中的工況組合進行仿真。從識別結果圖11可以看出,前120s由于是采集路況沒有識別結果,隨后根據特征參數,路況識別模糊控制器識別路況結果為1城市路況,隨著速度的變化,識別結果分別為2郊區路況和3高速路況。結果表明制定的路況識別模糊控制器能夠很好的識別路況,這為測試PHEV能量管理策略做好了基礎。 圖11 路況識別結果圖 設置動力電池SOC初始值為1,最低門限值為0.25,將基于路況預測的PHEV能量管理策略1和基于規則的控制策略2在相同的工況下對比測試,仿真結果如圖12所示,策略2在電池電量充足的情況下主要使用電能,動力電池SOC下降較快,電量消耗達到最低門限值后開始進入電量維持階段。策略1動力電池SOC在整個行駛里程中均勻下降,在行程終點接近最低門限值。策略1較策略2,在整個行駛里程中合理使用了動力電池的電能,有效的提高了整車的燃油經濟性。圖13為兩種策略下燃油消耗對比圖,策略2在開始階段燃油消耗較低,再進入電量維持階段后,燃油消耗穩步上升。而策略1,在整個行駛里程中,燃油消耗平穩增加。策略2的整體燃油消耗較策略1低。由于策略2沒有考慮路況的變化及時改變工作模式,其節能效果較基于路況識別的能量管理策略差。 圖12 兩種策略下動力電池SOC變化對比圖 圖13 兩種策略下燃油消耗對比圖 (1)在行駛路況識別的基礎上,提出了路況預測的方法。提取過去至當前時間窗口ΔT內的特征參數,作為路況識別模糊控制器的輸入,輸出的路況類型作為下一個時間間隔Δt的路況類型。 (2)在離線下對不同行駛里程、不同行駛路況采用動態規劃全局優化算法,得到全局最優的動力電池SOC變化軌跡。把最優的SOC變化軌跡線性擬合線作為SOC參考曲線。 (3)依據SOC參考曲線,結合預測得到的路況類型,制定基于路況預測的PHEV能量管理策略。仿真對比分析表明,相對于基于規則的控制策略,基于路況預測的PHEV能量管理策略在滿足汽車動力性的前提下,可以有效的減少整車的燃油消耗,提高整車的燃油經濟性,驗證了所制定策略的可行性和有效性。 (4)本文制定的能量管理策略依據的是離線下最優的SOC變化軌跡線性擬合線,并不是實際路況的SOC變化軌跡。為進一步提高整車的燃油經濟性,如何制定更接近實際路況的SOC變化曲線,將是后續研究工作的重點。 [1] 秦大同, 趙新慶, 蘇 嶺, 等. 插電式混合動力汽車變參數能量管理策略[J]. 中國公路學報, 2015, 28(2): 112-118. [2]StephanCH,SullivanJ.Environmentalandenergyimplicationsofplug-inhybrid-electricvehicles[J].EnvironmentalScience&Technology, 2008, 42(4): 1185-1190. [3] 程 飛, 趙 韓, 尹安東, 等. 插電式并聯混合動力汽車模糊控制策略設計與仿真[J]. 合肥工業大學學報: 自然科學版, 2015, 38(9): 1159-1164. [4] 劉文杰. 混聯型混合動力汽車控制策略優化研究[D]. 重慶: 重慶大學, 2007. [5]ZhangM,YangY,MiCC.Analyticalapproachforthepowermanagementofblended-modeplug-inhybridelectricvehicles[J].IEEETransactionsonVehicularTechnology, 2012, 61(4): 1554-1566. [6] 林歆悠, 孫冬野. 基于工況識別的混聯式混合動力客車控制策略研究[J]. 中國機械工程, 2012, 23(7): 869-874. [7] 彭志遠. 單電機ISG型AMT重度混合動力汽車能量管理策略研究[D]. 重慶: 重慶大學, 2012. [8] 周 楠, 王慶年, 曾小華. 基于工況識別的HEV自適應能量管理算法[J]. 湖南大學學報 (自然科學版), 2009, 36(9): 37-41. [9] 周之光. 行駛工況自適應的PHEV能量在線實時優化控制研究[D]. 長沙: 湖南大學, 2012. Energy Management Strategy of PHEV Based on Traffic Prediction Ma Lingling,Fu Zhumu,Li Dongwei (Information Engineering College, Henan University of Science and Technology,Luoyang 471023, China) In order to improve the fuel economy and reduce emissions of plug-in hybrid electric vehicles, a PHEV energy management strategy based on road condition prediction is proposed. Firstly, the PHEV system structure is established and three kinds of PHEV basic working modes are defined based on the SOC(State of charge) change trajectories of the battery packs. Then, the traffic condition fuzzy controller is designed to recognize the current road condition. Finally, according to the type of traffic prediction in combination with the curve of the reasonable planning of power battery SOC constraints, the energy management strategy of PHEV is developed. The simulation results show that the energy management strategy can make the SOC of the power battery keep fluctuating around the set reference trajectory to improve the fuel economy and reduce the emission. plug-in hybrid electric vehicle; traveling road condition identification; SOC reference trajectory; energy management strategy 2016-12-08; 2017-01-05。 國家自然科學基金(61473115);河南省科技創新人才杰出青年計劃(144100510004)。 馬靈靈(1988-),女,河南項城人,碩士研究生,主要從事混合動力汽車控制算法方向的研究。 付主木(1974-),男,湖北省仙桃市人,教授,博士,主要從事混合動力汽車的建模和控制算法方向的研究。 1671-4598(2017)05-0207-05DOI:10.16526/j.cnki.11-4762/tp TP A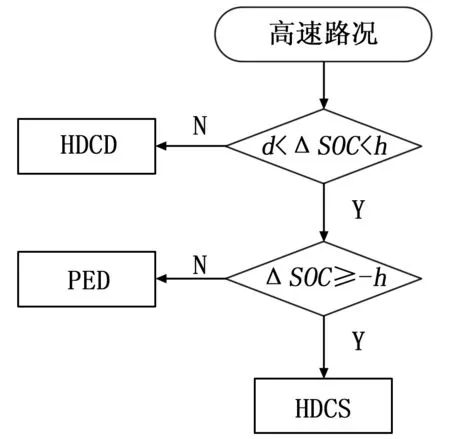
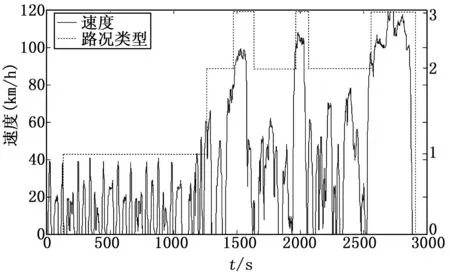
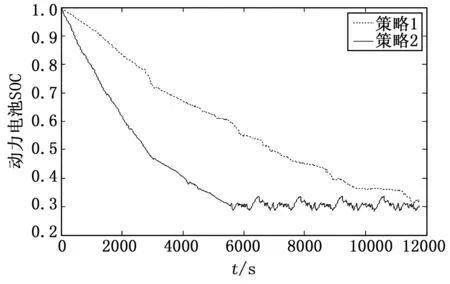
4 仿真驗證分析
5 結論
