基于無人飛行器的急救系統研究
2017-05-30 10:48:04喬榕溫曉婧馬玲靖旭
科技風 2017年6期
關鍵詞:無人機
喬榕 溫曉婧 馬玲 靖旭
摘 要:本文針對目前國內交通混亂擁堵,救護車在接到急救任務后不能趕在病人的黃金時間內到達現場的普遍問題。主要研究如何構建一個以無人機為載體,醫院、救護車、急救中心三方的急救醫療體系結構,來解決目前由于交通堵塞引起救護車遲到以及由于信息共享性差而導致的急救方案不理想的問題。
關鍵詞:無人機;急救成功率;急救系統
醫療是人類社會的基本問題,我國十分重視對公眾的院前急救。許多時候,病人的病情危重都是延遲、救護車的遲到等原因造成的。以無人機為載體搭載完備急救裝置的應用對急需救治的人來說是一個很大的轉機,可以大大提高患者的急救成功率。通過研究無人機在醫療方面的應用,設計出一個完善的急救醫療系統,將醫院、急救中心和救護車三者結合起來,最終實現病人的數據共享或實現實時監測救護車的位置與動態,同時通過智能化的救護車遠程控制急救裝置,使得現場的施救人員在緊急的情況下,準確得到病人所需的藥品,并且對病人的生理特征進行檢測并反饋,從而使救護車內的醫護人員做到心里有數,制定相應的治療方案,準備要采取的治療措施,提高醫院的工作效率,從而使整個急救過程更加體系化、智能化、人性化,使其更好地服務于現代化社會。
1 研究背景
2014年底,荷蘭一名大學生率先研制出了一款急救無人機,它的速度可達到每小時96公里,由6個螺旋槳驅動,可攜帶4公斤負載。研制者表示:“歐盟每年有大約80萬人心臟驟停,只有8%的人幸存。造成如此低的存活率的主要原因在于應急部門需要大約10分鐘的響應時間,而心臟驟停后大約4到6分鐘便會導致腦死亡和最終的死亡。這種救護無人機能夠在1分鐘內將除顫器送到周邊12平方公里內的患者身邊,將存活率從8%提高到80%。”
2015年,谷歌就以無人機攜帶救生設備出急診的理念申請了專利。投資者按下特定的緊急狀況按鍵,攜帶相應急救設備的無人機就會迅速飛來。專利解釋說,呼叫設備可以通過wifi、網線,以及借助手機和谷歌的無人機隊取得聯系。
隨著國內外醫療體系的發展,公眾的院前急救得到極度重視。以無人機為載體搭載完備急救裝置的應用將在很大程度上提高院前急救成功率。而至今已出現的基于無人機的醫療系統存在功能單一、沒有生理數據采集、與醫護人員缺乏溝通聯系等不足和缺陷。在智慧城市的大背景下,已有的先進通信技術將與醫療體系相融合,帶給基于飛行機器人的急救系統新的發展。
2 研究目的
此次本項目主要為達到以下研究目的:
1)使用無人機搭載急救裝置的方式,利用無人機的機動性,縮短其到達搶救現場的時間,彌補救護車因道路堵塞而不能及時到達現場的缺點,有效降低病人因搶救不及時而死亡的概率,并在無人機上配備攝像頭,將現場情況實時反映到醫院,大大提高患者的存活率;
2)設計功能相對齊全的急救裝置,內部包括相應的急救設備、檢測設備與急救藥品,使救護人員可以針對病人不同的病情選擇措施與藥物;
3)通過基于ARM的微型電腦主板,救護車遠程控制機載急救小艙室的打開,使現場的施救人員可以準確拿取藥品與設備,從而及時進行施救,穩定病人病情;
4)將所測得的病人的生理指標通過4G技術傳回到救護車內的yeelink云平臺,使醫護人員能夠對病人的狀況初步了解,從而準備相應的措施;
5)建立醫院、急救中心與救護車之間的急救系統:將病人的病史(若有的情況下)從醫院調到救護車內作為治療參考,并可以與醫院通過專用通信軟件實現實時語音及視頻聊天;急救中心調度系統可以實時監測救護車的位置與狀態。
3 研究原理
1)結合本項目的需求,設計急救裝置上的控制板大小、功能、及通信模塊,選定需要測量的患者的生理參數與合適的傳感器,比如心率、血氧、體溫、心電圖傳感器,并將其與控制板的通信模塊相結合,使其能夠實現數據的實時采集、發送和信號的接收等功能;
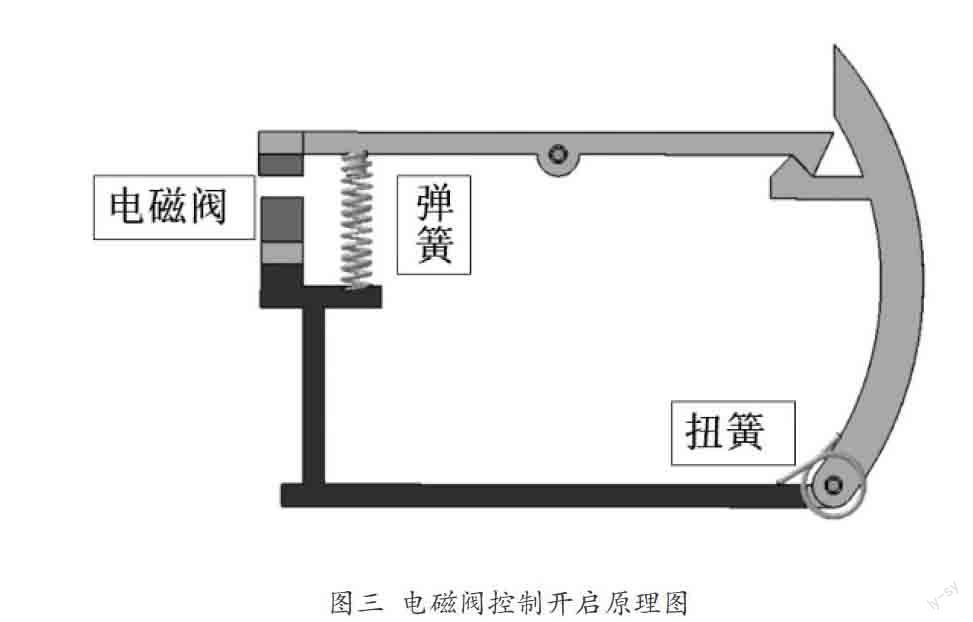
2)設計機載急救裝置,尤其是機械受控部分,分析目前機械控制的方式,比較得出一種最佳方式,不僅使其救護功能較為完備,還能夠使救護車通過遠程控制的電信號推動急救每一小艙室的打開;
3)選擇目前比較時興智能家居控制系統中的遠程控制工具—基于ARM的微型電腦主板(樹莓派),來實現救護車對無人機上急救裝置的遠程控制。基于ARM的微型電腦主板擺脫了控制距離的限制,使數據可以超長距離、準確無誤的傳輸。
在深入分析基于ARM的微型電腦主板的分類,功能、及特性的基礎上,研究目前各種版本的基于ARM的微型電腦主板的系統功能、編程語言、使用特性與限制,選定符合項目要求的基于ARM的微型電腦主板類型與編程語言;
4)通過分析目前現有的資料,結合國內外智能化救護車發展現狀,開發一款全新的救護車上的專用軟件,使其不僅能夠實現與醫院的實時語音、視頻交流,并且能夠調回醫院數據庫中病人病史,便于醫護人員制定最佳治療方案;
5)研究目前較遠距離通信技術,深入分析當前通信技術的優缺點,比較采用哪種技術更加安全可靠,更符合本項目的研究需求與未來幾年國內外的發展趨勢,確保醫院與救護車之間的語音及視頻交流的實時性與數據傳輸的及時性。
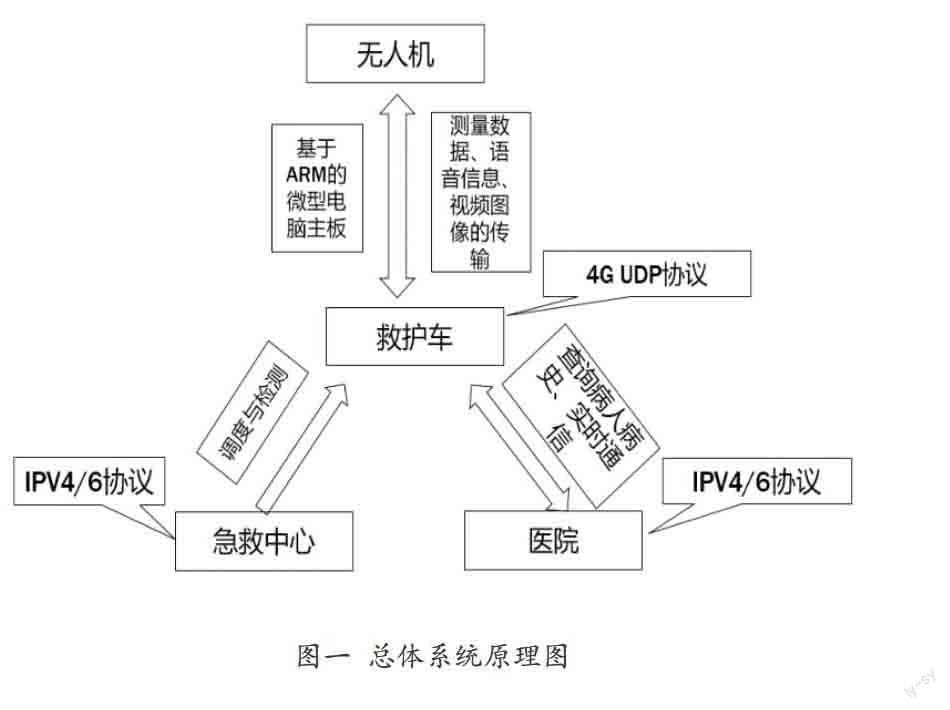
4 總體構想圖
如圖一所示,多旋翼無人機的體系結構設計總體分為四個方面:無人機上急救裝置的結構設計、救護車對機載急救裝置的控制、現場施救人員與救護車內部醫護人員的實時交流以及救護車與醫院之間的通信。
5 各部分設計效果圖
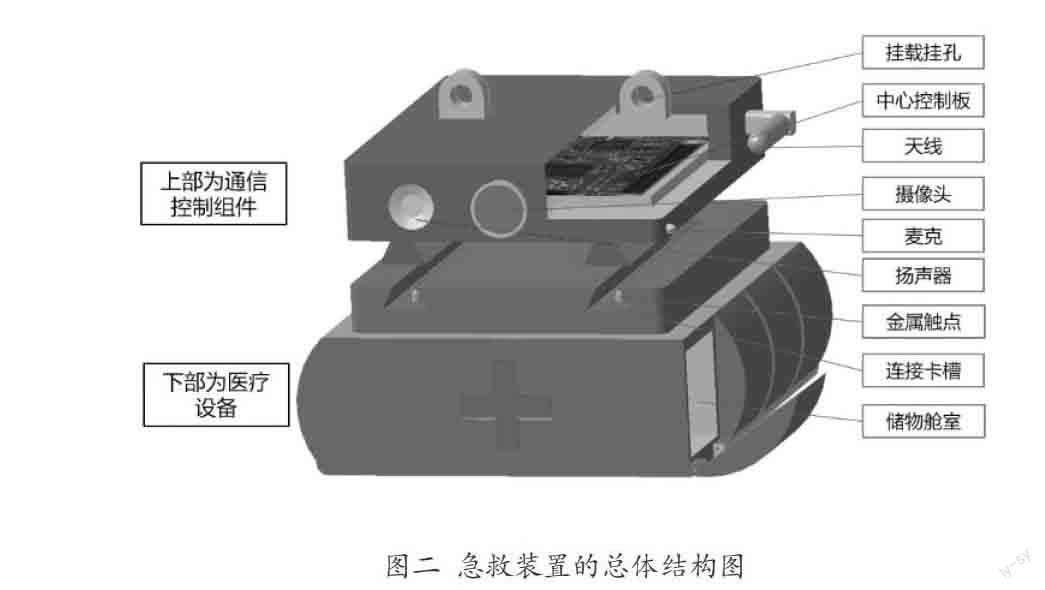
5.1 急救裝置設計效果圖
急救裝置總體可分為兩部分,分別是上部的通信控制組件和下部的醫療設備。
5.1.1上部通信控制部件
上部為控制模塊,其內部包括核心處理單元(基于ARM的微型電腦主板),二級控制板,無線通信模塊,供電電源,麥克,揚聲器,攝像頭,通過上部的掛載孔掛載至飛行器底板上。
上部的主要功能是與急救車進行通信,將從檢測設備上以及攝像頭和麥克風收集到的信息發送至救護車上,并能夠接受救護車上發出的指令。攝像頭能夠將現場的實時畫面拍攝下來,病人家屬通過麥克風與揚聲器實現和醫生實時的語音交流。上部的控制信號通過電磁繼電器和下部的控制開關相連接。
5.1.2下部醫療設備
下部由電磁閥控制的艙室,左右各有若干個裝載艙室,其中左側為檢測設備的裝載艙室,右側為急救藥品的裝載艙室,兩部分通過卡槽實現機械連接,在卡插上設有金屬觸點,能夠實現兩部分的信號傳送以及充電的功能。
急救裝置的設計考慮到搶救現場的實際情況,配備有醫療設備,藥物等救護所需物,并設計有天線等通信模塊與救護車實現實時通話。該裝置使得整個搶救過程更加人性化、智能化。
5.2 救護車對機載急救裝置的控制
5.2.1對急救裝置的控制
該部分使用基于ARM的微型電腦主板,通過python語言編程及onenet云平臺操作來實現對繼電器的開閉。
5.2.2急救裝置與救護車的數據傳輸
該部分基于ARM的微型電腦主板通過4G網絡連接到onenet云服務平臺,傳感器通過zigbee技術傳送到樹莓派上,在樹莓派內用python編程,從而實現上傳數據。救護車內的筆記本電腦即可看到相關數據。
5.3 施救人員與救護車內醫護人員的實時交流設計
當飛機著陸之后,救護車上的計算機已安裝VLC播放器,通過yeelink平臺發出指令,從而攝像頭、揚聲器及麥克風等設備打開,通過4G網絡連接來實現與救護現場的實時語音及視頻傳輸。
該功能的實現將專業醫護人員與現場的病人家屬聯系起來,可以實時指導病人家屬進行一些簡單但必要的急救措施,為病人爭取黃金的急救時間。除此之外,醫護人員可以掌握病人的實時狀況,從而制定到達現場后的急救方案。
5.4 救護車與醫院的實時通信設計
在VB的環境下,編寫醫院與救護車的專用通信軟件,進行實時通信與數據共享。
5.4.1通信程序設計
該軟件的模式為客戶機/服務器(C/S)模式,即客戶端向服務器發送連接請求,服務器對請求進行響應,從而建立起數據傳輸通道;之后客戶端與服務器之間便可以進行簡單的語音及視頻交流。
5.4.2服務器設計
創建一個“標準EXE”工程,選中winsock控件,將其屬性設置為0,即ckTCPProtocol協議。讀取服務器的IP地址,當接收到來自客戶端的請求時,服務器由偵聽狀態轉換為接收狀態。
5.4.3客戶端設計
同樣創建一個“標準EXE”工程,將其屬性設置為0。讀取本機的IP地址,當收到來自服務器的接收請求時,便可發送相應信息;當服務器傳回消息時,利用winsock控件中的GatData來接收數據。
利用專用通信軟件,在病人未到達醫院之前,救護車上的醫護人員可以了解病人病史,采取準確的急救措施,并可以和醫院的專家共同進行商討,及時制定病人的救治方案,并安排專業醫護人員做好手術準備。這樣更加完善了醫療急救系統,有利于全方位打造未來智慧化城市,使人類的醫療更有保障。
6 創新點
1)利用無人機靈活,機動性高的特點,有效緩解救護車發生交通堵塞而延誤最佳救治時間的狀況,第一時間到達搶救現場,將醫療設備與急救藥物送給患者。
2)通過基于ARM的微型電腦主板,救護車對急救裝置的指令控制,急救裝置與救護車的數據傳輸,以及攝像頭與救護車的視頻通信,實現救護車的遠程控制,指導患者家屬進行必要的急救與生理檢測,并將測得的生理參數傳回,便于實時了解病人狀況,提前掌握病人的第一手資料。
3)通過4G通信技術,建立一個以無人機為載體,救護車、急救中心、醫院三方的醫療救護系統,急救中心可以調度救護車,救護車可以遠程控制無人機并接收無人機上急救裝置傳回的實時數據與圖像,醫院可以將患者的病史傳給救護車上的醫護人員,便于他們更加全面了解患者,更加準確地診斷病情,采取相應的急救措施。
7 可行性分析及使用價值
本項目針對急救系統120救護車的不能及時到達而錯過救治時機問題,提出基于飛行機器人(無人機)與公共醫療數據共享系統技術的急救系統方案,并研制開發其中的關鍵技術和單元技術,項目具有廣泛的應用前景和社會效益,是未來醫療急救系統的發展趨勢。設計項目從關鍵技術、系統結構、單元技術和應用驗證等方面進行了詳細的論證,并給出了可行的研究開發方案。
參考文獻:
[1] S. K. Bhoi1, P. M. Khilar1, VehiHealth: An Emergency Routing Protocol for Vehicular Ad Hoc Network to Support HealthcareSystem,JOURNAL OF MEDICAL SYSTEMS,40(3),2016.
[2] Jin-Ho Park*,Hong-Sik Yang*,Jae-Hyeok Lee*,Hoon-Jae Lee*,Tae-Yong Kim*,Remote Power Control System using the Raspberry Pi,The International Journal of Advanced Smart Convergence 4(2):120-123,2015.
[3] El-Masri Samir, Saddik Basema, Proposal of an End-to-End Emergency Medical,System,Studies in health technology and informatics,Vol.169, pp.349-53,2011
[4] Devi,MK(Devi, Kiruthiga M.),Balakrishnan,R(Balakrishnan,Ranjith),Automated Fetal Monitoring System,Procedia Engineering,38:861-866,2012.
[5] Yuehong YIN,The internet of things in healthcare: An overview, Journal of Industrial Information Integration, In Press,Uncorrected Proof,Available online 4 March 2016.
[6] 王增,羅博文.李欣寧,葛泉波.基于智能物聯網的醫療救護車系統設計,控制系統設計(2014年06期)
[7] 宋斌,施永周,董德勝,王丹,周文婷,廖金平.基于無線網絡的區域急救系統的設計,中國醫療設備,2015年第30卷02期.
[8] 李龍棋,方美發,唐曉騰.樹莓派平臺下的實時監控系統開發.閩江學院學報,2014年第 5 期.
[9] 林一平.救死扶傷的救護無人機.航空航天,2015年03期.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
