
新型非機動車間隙插空模型研究
2017-05-30 21:44:21樊少鋒
科技尚品 2017年2期
關鍵詞:仿真
樊少鋒


摘 要:通過引入Logit模型來描述新型非機動車流中車輛間隙插空行為,建立消除車道概念的自主性間隙插空模型,采用檢測手段獲得車輛運行軌跡數據,并用極大似然估計法對構建的間隙插空模型進行了標定。最后編寫仿真程序驗證該模型的有效性。
關鍵詞:Logit模型;間隙插空模型;仿真
非機動車交通一直是我國城市交通系統的重要組成部分,近年來電動自行車的飛速發展,改變了原來以自行車為主體的非機動車交通體系,形成了電動自行車和自行車混合行駛的新型非機動車流。由于電動車日常行駛速度與自行車速度相差顯著,高速車輛為接近其期望速度運行,總是尋找更舒適自由的間隙,并向該間隙運動。為了準確描述間隙插空行為,重點考慮駕駛員特征和目標車到間隙的距離等因素對間隙插空的影響。本文研究了消除車道概念上的車道變換行為即間隙插孔行為。
目前,國內外對于非機動車換道模型的研究主要是由機動車發展而來,且大部分是基于虛擬車道概念的,未能貼切的描述車輛實際運行狀態。典型的矢量場模型描述的是消除虛擬車道概念下的車輛受到周圍各車輛作用力的情況而產生的運動,是一種被動的橫向運動。而實際情況中,非機動車輛本身具有間隙插空的意圖,會主動選擇更舒適自由間隙。機動車運動模型中基于隨機效用理論的自主性車道變換模型較好的反應了車道變換是駕駛員在不同車道行駛狀態下滿意程度的選擇結果,因此本文借鑒該模型在機動車換道行為中的應用,結合非機動車無車道劃分的特性將目標車到間隙的距離、間隙本身的特性作為效益函數變量。通過利用Logit模型構建間隙插空運動模型。
1 模型構建
1.1 建模思路
實際發現,非機動車插空行為是經過駕駛員嚴格判斷后才會產生的,具有很大的隨機性,并不是所有的間隙都會使車輛產生插空行為。本文用隨機效用理論來描述這一隨機現象,規定目標間隙為效用最大的間隙,即駕駛員的最佳選擇。駕駛員將左側間隙效用U1,右側U2,本間隙效用U0三者進行對比,當存在除了目前所行駛間隙以外其他間隙的效用大于本間隙時,即選擇其他間隙的概率大于0.5時,間隙插空需求產生。本文構建判斷性間隙插空模型思路如圖1所示:
1.2 判斷性間隙插空模型構建
1.2.1 意圖產生解析
由判斷性間隙插空行為的隨機性可知其需求產生的過程受很多因素的影響,如人的駕駛傾向性、不同間隙的舒適程度以及當前運行狀態的自由性等。該選擇性插空行為不同于強制性插空行為,車輛不進行插空行為也能完成其行駛任務,即插空行為由駕駛員判斷是否執行。研究認為,車輛習慣性對相鄰的間隙或者較大的次鄰間隙的駕駛滿意程度進行評價,并對可提供的滿意間隙環境進行選擇。
由上可知,非機動車的插空行為具有二項選擇特性。非機動車在行駛時隨著時間地點的變化車輛可選擇的插空間隙也在不斷變化,駕駛員時刻對自身所在位置間隙和可插空間隙進行滿意度評價并做出選擇。對特定時刻出現的可插空間隙,駕駛員只有接受或拒絕該間隙兩種選擇。本文擬采用二項Logit的概率選擇模型來描述非機動車的這一特征。
1.2.2 選取效用函數變量
本文選取前后車速度差、前后車車頭間距和目標車到空隙的距離三者之間的復雜的向量函數來表達目標車在各個間隙行駛時的效用值。
特征變量Xin決定了間隙插空的概率,是模型構建的關鍵。由于非機動車的插空行為與機動車的換道類似,本文借鑒機動車車道效用的確定方法選擇龍小強的相對速度、間距及車輛類型作為特征變量,與此同時由于自行車和電動自行車作為新型非機動車流的主體,車輛類型對間隙效用作用不明顯,故剔除該變量。實際觀測得知目標車距離間隙的遠近直接影響到非機動車駕駛員的插空行為,因此目標車到間隙的距離影響著車道效用,選擇目標車到間隙的距離這一參數作為效用函數的變量。
通過上述選擇的3個特征變量來表示間隙的效用大小,設非機動車本間隙、相鄰間隙特性都不完全相同,若左右兩側存在間隙效用大于目前所行駛的間隙效用時,車輛會選擇效用較大的間隙,插空需求產生。本文線性效用函數如公式1所示:
其中:
θ0——常數項;θ1,θ2,θ3——分別為與特征變量相對應的未知參數;——目標車與前車的相對速度;——目標車與前車的車頭間距;Lin——目標車到間隙的距離i=1,2;i=1表示目標車在本間隙行駛;i=2表示目標車在其他間隙行駛;此處假定目標車到本間隙的距離為0m。
2 模型參數標定及驗證
2.1 模型參數標定
模型樣本采用距交叉口約100m處的非機動車道上高峰小時交通俯拍數據,該時段非機動車流量大,電動自行車和自行車之間相互作用比較明顯,各種車輛期望速度體現較好,插空現象頻繁出現,樣本效果貼近真實情況。
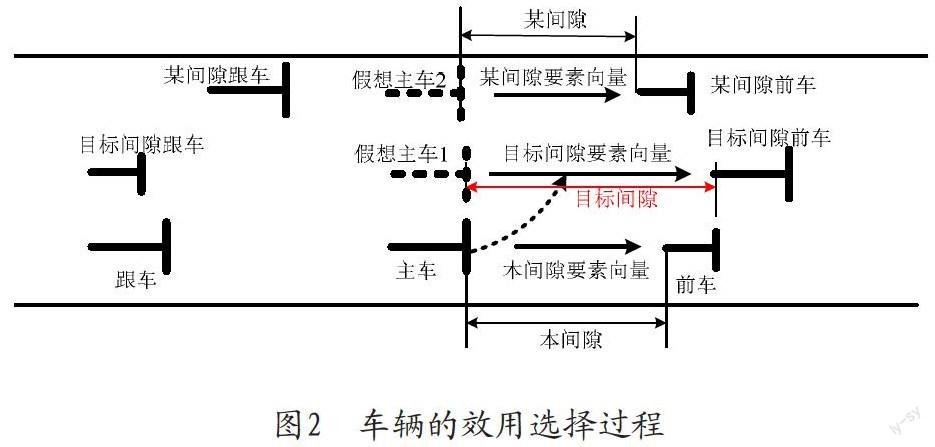
采取的樣本應均是車輛進行選擇性間隙插空行為,而由于外界環境須進行強制性插空的樣本應剔除掉。令目標車與前車的相對速度ΔV、目標車與前車的車頭間距ΔS,以及目標車與間隙之間的距離L,三者做為影響間隙效用的依據,令ΔV1為本間隙前后車相對速度,ΔV2為可插空間隙前后車相對速度,L1為目標車與本間隙之間的距離,L1在本文中取0,L2為目標車與可插空間隙之間的距離;同理,捕獲車輛在本間隙正常行駛時刻且附近有可插入間隙時車輛數據,ΔV、ΔS、及L三參數作為該樣本中目標車選擇本間隙狀態下的本間隙與鄰間隙的效用依據。對于非機動車而言,可能存在多個對目標車有吸引作用的間隙如圖2所示,實際車輛會選擇效用最大的間隙為目標間隙,圖2為車輛效用判斷的過程示意圖:
應用視頻檢測手段獲取原始數據,根據樣本提取原則,運用手工處理工具提取樣本并初步獲得車輛運行軌跡數據,將數據分類匯總后,利用Spss對模型參數進行極大似然估計。
已知大量的車輛間隙插空選擇結果,令選擇結果中是否進行間隙插空(不插空記為0,插空記為1)作為被解釋變量,速度差、車頭間距差、目標車到間隙的距離之差作為解釋變量。根據參數估計結果可得間隙總效用函數為:
理論上駕駛員n在由本間隙i選擇間隙j進行插空的概率為:
當Pjn大于0.5時,則產生間隙插空的需求,若計算得左右間隙Pjn均大于0.5,則將左右可插空間隙的Pjn進行比較,選擇效用大的間隙進行插空。若兩側可插空間隙Pjn相等,且同時大于本間隙效用,此時由駕駛員喜好來定。
2.2 模型驗證
采用面向對象的建模方法,在類庫的基礎上進行建模,擬開發出一個適合于非機動車流間隙插空行為的交通仿真系統。
當車輛存在可插空間隙時,根據間隙插空模型公式,駕駛員選擇效用最大的間隙進行插空,如果原間隙的效用最高,則保持在原間隙行駛不插空,反之將向左或者向右插空。如圖3所示:
3 結論
用隨機效用理論描述間隙插空需求的產生,建立了基于效用選擇的判斷性間隙插空模型。該模型消除了車道概念,同時在構建效用函數時將間隙與目標車的距離考慮在內,將目標間隙本身特性同外界環境共同構成效用函數因素,采用極大似然估計法對構建的判斷性間隙插空模型進行了標定,分析相關參數值,驗證了模型的可行性。研究結果可為非機動車的微觀仿真研究提供相關參考。能貼切反映新情況下的非機動車運行狀態。
參考文獻
[1]劉運通,石建軍,熊輝.交通系統仿真技術[M].北京:人民交通出版社,2002.
[2]王華東.一種新的交通流矢量場微觀模型[J].中國公路學報,2003,16(2):99-102.
[3]龍小強,譚云龍.微觀仿真自主性車道變換模型[J].公路交通科技,2011,29(11):115-119.
[4]鄭弘.道路交織區仿真模型研究[D].北京工業大學,2001.
[5]金安.Logit模型參數估計方法研究[J].交通運輸系統工程與信息,2004,4(1):71-76.
(作者單位:天津鐵道職業技術學院)
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
