基于MCGS的污水處理過程控制系統論證設計
2017-05-30 03:53:51趙慧
科技風 2017年16期
趙慧
摘 要:在本次污水處理過程控制系統論證設計中,MCGS組態(tài)軟件扮演了非常重要的角色,如:構建組態(tài)界面動畫便于檢測等。同時,根據此次設計的控制要求及認真分析后可知,污水處理過程控制最好是建立在串級回路控制系統的方案基礎上進行,這就需要我們根據相關要求對串級回路控制系統有進一步了解,并進行基本論證設計。
關鍵詞:污水處理;MCGS組態(tài)軟件;串級回路控制系統
本文通過研究設計一套基于過程控制的污水處理系統,它是利用RTGK-2型過程控制實驗裝置,模擬實現工業(yè)污水處理過程中對清水池水位的控制,同時兼顧對污水流量的控制,并利用西門子PLC作為控制器,采用PID控制實現清水池水位與污水流量串級系統的設計,以此來論證較為適合污水處理過程控制的設計方案。
1 方案建立
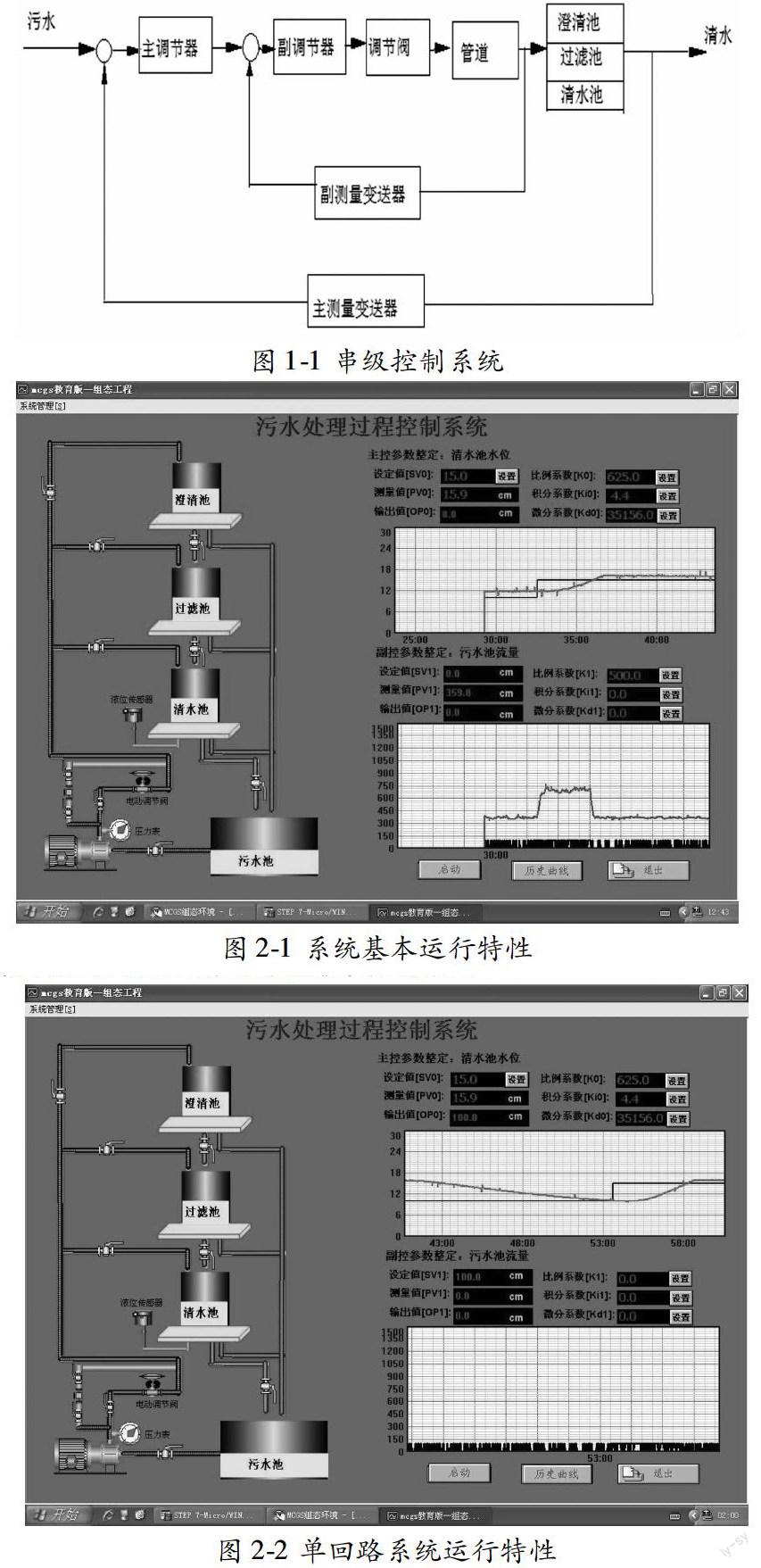
主副控制器均采用PLC控制器實現其控制,可設計出滿足主控制器控制清水池水位,副控制器控制污水池流量的污水處理過程系統,如圖1-1所示:
針對本次設計可知,控制系統是要滿足主控制器控制清水池的液位,和副控制器控制污水池的流量,串級控制系統可以滿足主控和副控的執(zhí)行,且系統中增加了包含二次擾動的副回路,不僅能改善被控過程的動態(tài)特性,還能提高系統的工作效率。
2 系統運行與分析
2.1 串級回路控制系統
系統基本運行采用的是PID控制,根據所算出來的液位PID參數,保持流量比例系數K1為500不變,便可以得到整定出來的系統運行圖,見圖2-1。
串級系統基本運行特性如圖2-1所示,最開始的液位初值設定為10cm,當液位測量值上升且平穩(wěn)后,加一個階躍,電動閥開度變大,使得流量立即大幅增加,從而使液位也開始增加,2分鐘后,系統再次達到穩(wěn)定,此時,電動閥開度逐漸減小并保持平穩(wěn)。
2.2 單回路控制系統
為論證串級回路控制系統是較為適合本次設計的系統,特引入單回路控制系統與其作對比。單回路控制系統相比于串級回路控制系統少了一個副回路,在污水處理系統中,就意味著沒有了流量控制。因此,在所有PID參數保持不變的情況下,觀察并對比單回路系統與串級回路控制系統的穩(wěn)定狀態(tài)。
如圖2-2可看到,該系統僅是對清水池液位進行監(jiān)控,系統想要達到初次穩(wěn)定要經過較漫長的時間。在系統穩(wěn)定后,給一個5的階躍,系統約需4分鐘才能再次恢復到穩(wěn)定。而在串級回路系統(如圖2-1)中,同樣參數條件下給同樣的階躍,僅需2分鐘左右的時間系統就能恢復到穩(wěn)定。
3 結語
由上述分析可知,在污水處理過程控制系統中,在保持PID參數不變的情況下,即使給擾動,串級回路控制系統也能很快地恢復穩(wěn)定,說明在本污水處理過程控制系統中,串級回路控制系統抗干擾性較好。
綜上所述可知,串級回路控制系統是最為符合自動控制系統的特性指標——穩(wěn)、準、快,所以該系統是最合適污水處理過程控制系統的設計。
參考文獻:
[1]邵裕森,戴先中.過程控制工程及儀表.北京:機械工業(yè)出版社,2002,9.
[2]金以慧.過程控制.北京:清華大學出版社,1993.
[3]李俊秀.電氣控制與PLC應用技術[M].北京:化學工業(yè)出版社,2010.
[4]李亞芬.過程控制系統及儀表[M].大連:大連理工大學出版社,2010.
[5]李英輝,趙豫龍,戴青云.基于PLC的中水處理系統[J].石家莊職業(yè)技術學院報,2008,6(4):76-78.
