工業機器人的自主維修及故障管理策略
2017-05-30 10:48:04曾祥丹劉永亮李劉建波王冬宇芮銀龍
科技風 2017年10期
曾祥丹 劉永亮 李 劉建波 王冬宇 芮銀龍


摘要:工業機器人在TFTLCD制造行業的應用非常廣泛,極大的提升企業的智能制造水平,但是如果工業機器人出現故障停機,會嚴重影響企業的生產節拍,從而影響企業的經濟效益。因此,企業能夠自主維修工業機器人是非常必要的。本文以Sankyo液晶面板搬運機器人為例,簡要的總結了該機型的常見故障和處理方法,及日常保養和故障管理策略。
關鍵詞:工業機器人;常見故障;分析;自主維修
工業機器人是一種集機械、電子、控制、計算機、傳感器、人工智能等跨學科的先進技術于一體的智能裝備, 對提高制造業的智能制造水平具有非常重要的意義,工業機器人作為現代制造業的主要自動化裝備在國民經濟的各個領域中應用非常廣泛。目前,各個國家都非常重視工業機器人的技術研究,工業機器人的擁有量已經成為衡量一個國家制造業綜合實力的重要標志之一[1]。
TFTLCD制造行業的生產線規模大、自動化程度高,在生產過程中玻璃基板的搬運都是由工業機器人完成,但是隨著早期投產建設的生產線逐年老化,工業機器人的故障率也逐年提高。由于TFTLCD制造行業的生產方式屬于連續型生產,如果生產線中某個工業機器人出現故障停機,會影響后段工藝設備的正常工作,甚至影響整條生產線的正常運轉。因此,需要企業維修技術人員能夠快速的應對機器人的故障處理,及時排除故障恢復正常生產。本文根據維修技術人員在企業現場維修工業機器人的實際經驗,簡要的總結了Sankyo液晶面板搬運機器人的常見故障和處理方法,以及故障管理策略。
1 自主維修工業機器人的重要意義
應用企業實施自主維修工業機器人的主要目的是為了保障機器人在正常狀態下工作,并延長其使用壽命。企業的維修技術人員能夠第一時間應對機器人的故障處理,可節省外部服務商來現場維修的費用和等待時間,降低機器人的平均故障間隔時間、提高企業的生產效率和降低企業的生產成本,從而實現企業的總體經濟效益的有效提升,同時防止企業出現技術災難與安全事故[2]。
工業機器人的穩定運行可以有效的保證企業生產的穩定性和經濟效益,但是集多種高新技術于一體的工業機器人機構精密復雜,對維修技術人員的專業技能提出了極高的要求。應用企業普遍不具備自主維修工業機器人的能力[3],而且當前的工業機器人缺少有效的故障預警和自診斷能力,一旦出現故障停機,通知外部服務商到企業現場進行維修,需要大量等待時間,嚴重影響企業的生產效率。因此,自主維修工業機器人對保證企業正常生產和改善生產技術指標是非常必要的。
2 工業機器人常見故障與處理方法
本文根據企業維修技術人員對Sankyo液晶面板搬運機器人進行自主維修的實際經驗,總結了該機器人的常見故障和處理方法。
2.1 Realtime Error的處理
機器人在運行過程中發生異常停機,查看示教器報警代碼為252,指示燈間隔性閃爍6次,初步判斷為Realtime Error,此類故障報警可能由伺服馬達損壞、減速器損壞、機器人控制器損壞、Encoder Cable損壞或伺服放大器損壞等原因造成的,在故障分析和處理過程中需要對上述原因逐一進行排查,此類故障排除作業流程如圖1所示。
伺服馬達和減速器的更換作業過程為:首先確認馬達和減速器的型號,然后拆卸損壞的馬達和減速器,安裝新的馬達,其次進行HWDEF文件設置,然后進行ABS原點恢復操作,再確認機器人的運行狀態和原始Mark的位置,最后運用3000SPWin軟件進行馬達更換操作設置。
2.2 升降氣缸故障處理
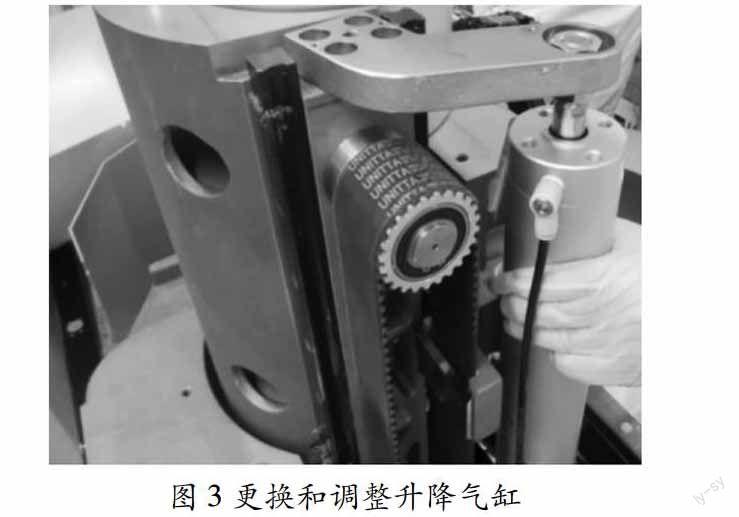
機器人在升降運行時噪聲較大,拆開機殼查看,發現升降氣缸桿磨損嚴重,如圖2所示,升降氣缸更換作業過程為:首先確認氣缸型號準備新氣缸,然后關閉壓縮空氣并釋放殘余壓力,其次拆除損壞氣缸,更換新氣缸并進行位置調整如圖3所示,然后接通壓縮空氣查看有無泄漏點,最后恢復正常生產,觀察機器人的運行狀態,無異常后確認故障排除。
2.3 真空報警處理
機器人在正常生產過程中,真空吸附出現報警停機,查看真空表的顯示數值為28kPa(真空壓力標準數值為70kPa),此類故障可能由真空吸盤損壞、電磁閥損壞、氣管磨損泄漏或者快插接頭損壞等原因造成的,在故障處理過程中需要對上訴原因逐一進行排查,首先擦拭真空吸盤,確認是否損壞,然后檢查電磁閥,確認電磁閥通斷是否正常,確認24V供電是否正常,其次檢查所有氣管,特別是氣管與其他零件有接觸的部分,確認氣管是否破損,然后檢查各處的快插接頭,確認是否有松動或者損壞。排查完畢后,更換損壞零件,確認真空表顯示數值是否在正常范圍內,最后恢復正常生產,觀察機器人的運行狀態,無異常后確認故障排除。
2.4 ABS原點恢復
對機器人進行馬達更換作業后,需要進行ABS原點恢復操作,也叫ENC原點恢復。ABS原點恢復操作包括如下兩種方式:
第一種是在示教器上操作完成,首先使用ENC Cable鏈接機器人控制器,然后將示教器上的鑰匙開關轉到Local Mode,如果示教器有錯誤信息提示,按Error Reset按鈕清除提示信息,其次打開Manipulator Power(SERVO ON),然后按ABS Homing鍵,按照示教器上的提示依次尋找每個軸的原點,最后關閉控制器,重新啟動后,即可恢復。
第二種是在計算機上操作完成,首先將示教器上的鑰匙開關轉到Remote Mode,然后用ADS cable連接計算機和機器人控制器,其次啟動3000SPWin軟件,然后使用User模式,選擇User Maintenance,再選擇ABS Homing,按照提示依次進行操作,最后關閉控制器,重新啟動后,即可恢復。
2.5 X軸滑軌更換
機器人在正常生產過程中, X軸運行時噪聲大,拆開機殼查看,發現滑軌磨損嚴重,如圖4所示。滑軌更換作業過程為:首先進行Mark制作和程序備份,并記錄相關數據信息,然后將機器人推至遠端關閉電源,拆除機殼并清掃干凈,其次確定滑軌的安裝基準面,將安裝基準面對側已磨損的滑軌拆除,使用校正器將新滑軌和基座固定,緊固螺栓如圖5所示,然后拆除安裝基準面側的舊滑軌,鋪設新滑軌,并使用千分表和測試治具調整滑軌的平行度如圖6所示,要求平行度≤±0.05mm,再拆除馬達驅動部件,用千斤頂將機器人的上本體頂起,拆除舊滑塊,并安裝新滑塊,恢復馬達驅動部件和機殼,安裝完成后進行現場清潔。啟動機器人,進行ABS原點恢復操作,確認機器人手臂在各個物料窗口的位置,對比原始Mark進行微調。最后恢復正常生產,觀察機器人的運行狀態,無異常后確認作業完成。
3 工業機器人的檢查和故障管理
3.1 工業機器人的日常檢查
做好工業機器人的日常檢查工作,對小故障及時處理,排除故障隱患,可有效防止出現大范圍的故障爆發,保證工業機器人的穩定運行。日常檢查工作包括以下6個方面:
(1)日常檢查工作一般是在工業機器人不工作的情況下進行,如果需要檢查機器人的運行狀態,維修技術人員必須首先確保自身安全,并且必須確認示教器的示教模式已開啟,所有操作行為必須嚴格按照標準作業流程執行。
(2)異常聲音和振動檢查:檢查馬達、減速機、絲杠、滑軌、同步皮帶和線纜保護鏈等零部件在運行過程中是否有異常聲音或者振動,檢查馬達是否有異常發熱現象,查找原因并更換有問題的零部件。
(3)外表損傷和異物檢查:檢查機器人外殼和外漏零部件是否有損傷和異物,重點檢查機器人各個關節的縫隙內是否夾雜異物,查找原因并排除故障,做好清潔工作,保持機器人的潔凈。
(4)氣路系統檢查:檢查管路和快插接頭等是否存在泄漏點或者松動,檢查壓力表和電磁閥是否損壞,查找原因并更換有問題的零部件,重新緊固松動的快插接頭和螺釘。
(5)示教點檢查:檢查機器人示教停止點與示教原點是否存在偏差,查找原因并及時修正。
(6)漏油檢查:檢查機器人的各個關節的縫隙是否有漏油現象,查找原因并排除故障,做好清潔工作,注射潤滑油操作必須嚴格按照機器人保養手冊的要求執行。
3.2 工業機器人的三個月點檢
工業機器人的三個月點檢工作包括以下3個方面:
(1)驅動單元檢查:檢查各個驅動單元如馬達、減速機、絲杠、滑軌、同步帶輪等是否有損壞和螺釘松動,及時更換損壞零件,重新緊固松動的螺釘。
(2)外部連接線檢查:檢查各處電器連接線、電器接頭、氣管和快插接頭是否松動和磨損,查找損壞原因并及時更換有問題的零部件,重新緊固松動的接頭和螺釘。
(3)傳動部件潤滑檢查:檢查各軸線性滑軌、滾珠絲杠、氣缸、馬達和減速器等潤滑情況,表面是否有異物和潤滑不良,查找原因并排除故障。
3.3 工業機器人的六個月點檢
工業機器人的六個月點檢工作包括以下3個方面:
(1)同步帶檢查:檢查同步帶和帶輪是否磨損、斷齒,及時更換損壞零件;檢查同步帶是否有松動,使用同步帶張力測試儀進行測試,并及時調整,張力調整作業流程必須嚴格按照機器人保養手冊的要求執行。
(2)內部配管配線檢查:檢查機器人機殼內部的電器連接線、電器插頭、氣管和快插接頭是否有松和磨損,查找原因并及時更換有問題的零部件,重新緊固松動的接頭和螺釘。
(3)主要傳動部件檢查:檢查機器人主要傳動部件如馬達、減速機、絲杠、滑軌、同步皮帶和同步帶輪等是否有損壞和螺釘松動,及時更換損壞零件,重新緊固松動的螺釘。
3.4 故障管理與預防性工作
要做好工業機器人故障管理與預防工作,必須掌握工業機器人發生故障的原因,積累常發故障和典型故障的資料和數據,深入開展故障的統計和分析,研究故障發生的規律,從而加強日常維護、檢查和預防性維修,故障管理和預防性工作主要包括以下6個方面:
(1)重視故障分析工作的開展,培訓維修技術人員掌握正確的故障分析方法,培養自覺對故障進行記錄、統計、分析的工作習慣,并對日常維修工作提出合理化建議。
(2)對關鍵工序的工業機器人應該重點關注,并且有計劃的進行監測和檢查,以便及時發現故障的征兆和惡化的信息。
(3)故障記錄是完成機器人故障管理的基礎資料,也是故障分析和處理的原始依據,故障記錄必須完整詳細,語言描述簡單清楚,詞語應便于理解,不能有歧義。維修技術人員完成故障維修后,認真填寫“故障維修報告”,積累形成故障維修履歷,供后續參考和查閱[4]。
(4)維修技術人員按固定周期匯集“故障維修報告”,形成機器人的故障基礎數據,通過對數據的統計和分析,獲得各類機器人的平均故障時間和平均故障間隔時間,并針對單臺機器人的故障數據進行分析,了解故障動態和原因,找出故障發生的規律,以便安排預防性的維修或改善措施。故障數據的分析結果還可以作為日常巡檢、檢查內容和維修標準的依據,并依據分析結果的變化對已有維修標準進行修正。
(5)維修技術人員通過對機器人的日常巡檢,獲取機器人的狀態信息和故障征兆,結合故障數據的分析結果和相關維修記錄,對某些頻發性的故障征兆和隱患進行預防性的維護和保養,防止機器人“帶病”工作,以便有效的控制和減少故障的發生。
(6)對于某些重大的故障征兆和隱患,應用企業的技術人員無力承擔的,應該及時請外部服務廠商協助,充分利用生產間隙和設備閑置時間實施故障維修,避免占用生產部門的正常生產時間。
4 結論
綜上分析,工業機器人常見故障是制約TFTLCD制造企業生產效率的關鍵因素之一,科學的故障維修技術是現代企業增強競爭力的有效手段,也是企業生存、發展、擴大生產和產業升級的有力保障。因此,企業必須重視工業機器人的自主維修工作,加大對自主維修工作的投資力度,加強對維修技術人員的培養,積極開展工業機器人的日常檢查、維護、保養、故障數據統計和分析等工作,構建科學的工業機器人檢修制度和維修標準,并嚴格的按照制度和標準開展日常檢修工作,保證工業機器人穩定安全的運行。
參考文獻:
[1]孫志杰,王善軍,張學鑫.工業機器人發展現狀與趨勢[J].吉林工程技術師范學院報,2011,27(7):6162.
[2]周凱.機電設備中的常見故障分析及維修策略[C].北京:科技與企業,2016:146147.
[3]劉磊.工業機器人遠程監控診斷服務系統的設計開發[D].大連理工大學碩士學位論文,2014:13.
[4]在笑天.如何做好工業機器人故障管理與預防工作[J].伺服控制,2014,(10):3637.
作者簡介:曾祥丹(1980),男,滿族,遼寧營口人,工程碩士,北京京東方光電科技有限公司,主要從事非標自動設備設計開發工作。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
哈爾濱鐵道科技(2020年2期)2020-11-16 01:15:12
電子制作(2019年23期)2019-02-23 13:21:30
電子制作(2018年18期)2018-11-14 01:48:24
電子測試(2018年1期)2018-04-18 11:53:30
臨床醫藥文獻雜志(電子版)(2017年11期)2017-05-17 04:48:45
山東工業技術(2016年15期)2016-12-01 05:31:22
電子制作(2016年19期)2016-08-24 07:50:00
設備管理與維修(2015年12期)2015-04-09 06:57:06
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44