仿人二足步行機器人爬樓梯行走機構設計
2017-05-30 10:48:04楊彥平
科技尚品 2017年1期
楊彥平
摘 要:隨著人類社會的發(fā)展,各種各樣的機器人正漸漸的走進我們的視野,有很多的地方都用到了機器人,在機器人的領域里越來越多的人開始愛好上了機器人。能更好的適應環(huán)境和地形是仿生機器人的優(yōu)點,很多人的工作可以由各種各樣的機器人去替代,對這種類人機器人的研究一直是人們關注的熱點。
關鍵詞:仿人二足爬樓梯行走機構;步態(tài)規(guī)劃;機構設計;四桿機構;CATIA
1 二足仿生機器人的特點
當前,人們對機器人的研究在不斷深入,尤其是對類人機器人的探索和應用正在受到極大的關注,并逐漸成為智能機器人行列中的主要研究對象。類人二足機器人爬樓梯的想法就變得更加現(xiàn)實,這種機器人具有人類的基本特性,例如:具有人類的靈活性,可以有思維,與人對話等,同時它也可以適應不同的環(huán)境,幫助人類完成人們完成不了的任務,這種類人二足機器人爬樓梯設計獎機器人的行動具體到爬樓梯動作上,可以減輕工人的工作強度,極大地提升工作效率,從而更好地服務人類。
1.1 設計目的
本設計主要是利用機械原理相關知識合理設計機械腿的相關尺寸及機構來實現(xiàn)爬樓梯的功能。
1.2 技術要求
(1)電機的選擇和控制原理;(2)運動學的分析和仿真;(3)連桿機構,傳動機構的設置;(4)穩(wěn)定性,重心轉移。
1.3 應解決的主要問題
(1)重心對于機器人行走穩(wěn)定性的影響,對機體質心及其穩(wěn)定性;
(2)二足行走機構的設計;
(3)兩腿之間運動時的協(xié)調配合,以及周期的確定;
(4)運動學解析:創(chuàng)建合適的運動學的模型,進而對各階段的運動進行運動學的解析和分析。
1.4 技術路線
(1)收集國內(nèi)外仿人二足步行機器人爬樓梯行走機構的相關資料,分析并消化,總結出我們自己的方法;
(2)仿人二足步行機器人爬樓梯行走機構的步態(tài)規(guī)劃,選擇合適的步態(tài),并穩(wěn)定性分析,行走步態(tài)設計;
(3)根據(jù)機構和運動學方面的分析,描繪類人二足步行機器人上樓梯時的行走過程的機構原理圖;針對運動特征設計相應機構,改善運動機構完成設計。
(4)根據(jù)腿的二維平面設計示意圖進行三維設計,并用CATIA軟件進行機構行走仿真,動態(tài)模擬分析。
2 仿人二足步行機器人爬樓梯行走機構步行的相關概念
步態(tài):通常在二足機器人步行的運動過程中,機器人的不同關節(jié)運動的一種協(xié)調關系在時序和空間上,以及機器人相對不同環(huán)境的一種關系。可由不同關節(jié)角運動軌跡和質心軌跡來表達。
步距:在行進的過程中,機器人的左腳和右腳落地位置間的縱向的距離。
跨高:當擺動腿在行進的過程中腳底離地面的最高的距離,可以作為機器人跨越樓體高度的大小。
步行周期:對機器人在周期性行走過程中,左腳或右腳順序兩次著地時所用的時間。在每個循環(huán)內(nèi)左右腿各向前邁一次,它又分了3個階段,即雙腳的支撐期、左腳的支撐期和右腳的支撐期。
步速:作為機器人步行能力的重要指標,是指機器人按單位時間內(nèi)相對步行的環(huán)境所行進的距離。
單腳的支撐:機器人僅擁有一只腳在與地面接觸,它起支撐的作用,而另外的一只腳處于擺動的狀態(tài)。
2.1 行進過程的設定
這里所描述的類人二足步行機器人爬樓梯的行進機構設計的目的是實現(xiàn)爬樓梯的基本功能,同時對機器人行進的環(huán)境應有一定的保證,在不影響機器人基本功能的前提下做出以下的設定:
(1)機器人在行進的過程中它是處于一種靜力學平衡的狀態(tài),即機器人行進方式為靜態(tài)步行;
(2)因為樓梯的臺階具有良好的水平性,就設定了機器人腳底面相對于臺階表面始終保持平行的狀態(tài);
(3)讓機器人沿著直線行進;
(4)機器人沿直線行進的過程中,髖關節(jié)與地面的距離保持不變;
(5)二足機器人的左腿與右腿的關節(jié)具有對稱性,在討論中只考慮左腿的運動情況,右腿的情況與左腿類似。
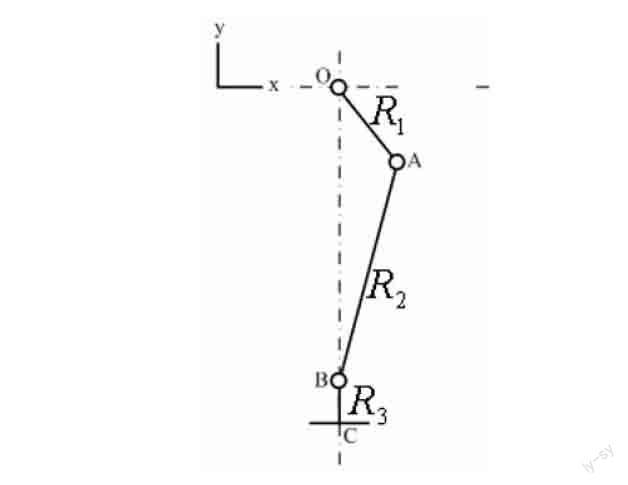
仿人二足步行機器人爬樓梯行走機構機械圖如下圖所示:XY平面投影定義的大腿長為R1,小腿的長度為R2。
由上圖可以看出,仿人二足步行機器人爬樓梯行走機構髖關節(jié)向上旋轉了角度的時候,其中大腿在Y軸方向提升高度,仿人二足步行機器人爬樓梯行走機構大腿Y方向提升高度。
2.2 步行穩(wěn)定性的判斷依據(jù)
二足機器人在步行的運動過程中,左右腳交替的與地面,發(fā)生周期性的作用,交替進行不斷前進。二足機器人步態(tài)研究的關鍵點就在于如何使支撐腳與地面的瞬時位置固定,使機器人在運動的過程中保持穩(wěn)定步行避免發(fā)生滑倒或翻倒。
2.3 髖關節(jié)設定
第一次設定的軌跡不一定使機器人穩(wěn)定,故在髖關節(jié)軌跡的規(guī)劃過程中設幾個可調參數(shù),根據(jù)調節(jié)參數(shù)讓機器人保持穩(wěn)定。
(1)執(zhí)行機構決定了整個系統(tǒng)的復雜度,機構越復雜,涉及的工作和配合越多,制作的精度就不容易保證;
(2)執(zhí)行機構關系到運動的最終狀態(tài),決定運行的姿態(tài);
(3)執(zhí)行機構可保證機器人整體功能的運轉。
腿部的結構是二足機器人身體里主要的部分,根據(jù)仿生學的知識,人腿部結構大致為:髖關節(jié),和膝關節(jié),還有踝關節(jié)和腳。本文采用曲柄搖桿機構實現(xiàn)其直線行走和爬樓梯功能的。兩組腿交替的變換使機身能向前運動,他們每組都支撐機體的重量,并在負重的狀態(tài)下使機體前行,因此合適的剛性和承載能力是非常重要的,所以對承載能力有著限制。
3 設計小結
通過這次機械原理課程設計,綜合運用了機械原理及其他課程的理論知識。將理論與實際結合在了一起,解決機械工程有關的實際問題,最重要的是從所學專業(yè)中找到了樂趣。在本次機械原理的課程設計訓練中鞏固學習了機械原理設計基礎、CAD二維制圖軟件和CATIA三維軟件,也學會了怎樣從前人設計中取得經(jīng)驗以及處理數(shù)據(jù)的能力。
參考文獻
[1]張瑞紅,金德文,張濟川,等.不同路況下正常步態(tài)特征研究[J].清華大學學報(自然科學版),2000,8(40):77-80.
[2]張春林編.機械創(chuàng)新設計[M].機械工業(yè)出版社,2007.
[3]陳學東,孫翊,賈文川.多足步行機器人運動規(guī)劃與控制[M].武漢:華中科技大學出版社,2006.
(作者單位:重慶交通大學)
