5000kN摩擦焊機導向機構模態及諧響應分析
2017-06-05 15:09:19吳學宏芮執元李雙艷杭上鈺程輝
中國設備工程 2017年10期
吳學宏,芮執元,李雙艷,杭上鈺,程輝
(1.蘭州理工大學 機電工程學院,甘肅 蘭州 730050;2.甘肅有色冶金職業技術學院 機電工程系,甘肅 金昌 737100)
5000kN摩擦焊機導向機構模態及諧響應分析
吳學宏1,2,芮執元1,李雙艷2,杭上鈺2,程輝2
(1.蘭州理工大學 機電工程學院,甘肅 蘭州 730050;2.甘肅有色冶金職業技術學院 機電工程系,甘肅 金昌 737100)
為解決5000KN摩擦焊機導向機構在工作過程中的爬行問題,需要對其進行仿真動力學分析。利用SolidWorks仿真軟件建立導向機構三維模型,并基于ANSYSWorkbench對機構進行模態分析,得出機構前6階固有頻率和振型云圖,對機構優化設計起到了指導作用,并為諧響應分析提供了頻率范圍;在模態分析基礎上,對立板和導柱進行諧響應分析,分別得出它們在工況下沿X、Y、Z方向的位移頻率響應曲線,分析得到它們最易產生共振的頻率,為機構后續的結構和動力裝置的優化改進奠定了理論基礎,也為類似的大噸位行走設備的結構設計提供了設計參考。
導向機構;動力學分析;ANSYSWorkbench;5000kN摩擦焊機
5000kN摩擦焊機是由某大學為電解鋁預焙陽極導電裝置鋁導桿和陽極鑄鋼爪,進行摩擦焊接而自主研發的一種新型大噸位摩擦焊機。它突破了傳統導電裝置焊接方法,提出了取消鋁-鋼爆炸焊片,直接對鋁導桿和鑄鋼爪進行摩擦焊接的新思路。導向機構的穩定可靠是這種摩擦焊機的技術核心部分,它的動態性能直接影響著焊接接頭的強度、一致性、焊接效率、焊接精度等諸多指標。因此導向機構的動態性能分析對于機構的結構和動力裝置的優化改進具有十分重要的意義。
本文首先對導向機構進行模態分析,即確定設計結構的固有頻率和振型等振動特性。此特性可以為結構系統的振動分析、振動故障診斷和預報以及結構動力特性的優化設計提供依據。然后做導向機構的諧響應分析,這樣可以保證導向機構在受迫振動下克服共振、疲勞及其他不利影響。

1~4導柱 5.立板 6.液壓缸 7.安裝板 8.加強板圖1 導向機構有限元模型
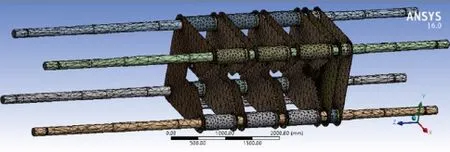
圖2 簡化后導向機構有限元模型
1 有限元模型的建立
本文采用三維造型軟件SolidWorks對直線導軌和導柱及其部件進行了三維實體建模,然后導入到ANSYSWorkbench中,得到如圖1所示的模型。將該模型忽略結構中的一些小特征,如倒角、螺紋、小孔等,因為這些特征雖然會增加網格劃分后的單元數量,影響分析計算的效率,但是對于整個結構的動態特性影響卻很小。由于計算機計算能力有限,所以將部分部件省略,改用一些約束代替。將立板之間的液壓缸及其連接板,加強板等省略,改為立板之間的Z向位移約束。簡化后模型如圖2所示。
整個導向部分所用材料為Q235,其特性為:材料密度為7.85×103kg/mm3,彈性模量為2×102N/mm2,泊松比為0.3,材料阻尼0.1。網格劃分時采用四面體網格劃分,節點數為163934,單元數為136003。夾具在導柱上運動時受力情況復雜,為了計算簡便可以把導柱與主軸箱和頂鍛箱連接部分簡化為固定約束,在立板上按簡諧規律(正弦規律)施加力矩M=3.2×106Nmm。
2 模態分析
2.1 施加約束
在典型有限元模態分析中,唯一有效的“載荷”是零位移約束,因而只需給有限元模型施加約束邊界條件。模態分析分為自由狀態模態分析和約束狀態模態分析,為更好模擬實際工作狀態,本文進行約束狀態模態分析,對應于該導向機構模型,導柱兩側端部與主軸箱和頂鍛箱內部嵌套鏈接,同時四組夾緊裝置可在導柱上自由滑行。因此導柱與兩側主軸箱和頂鍛箱處均為約束3個方向的平動自由度和3個方向的轉動自由度。
2.2 求解及結果分析
運用ANSYSWorkbench對伸縮臂進行模態計算,得出其前十階模態頻率及振型,列出前6階模態振型圖,如圖3所示。
由導向機構模態分析得到其前六階固有頻率,如表1所示。由于電機是該機床最主要的激振源,根據電機激振頻率公式可得電機的最大激振頻率為100Hz。再根據模態頻率值的評價標準,導向部分的1階頻率應大于(1.3±0.1)倍電機最大振動頻率。該電機(1.3±0.1)倍最大振動頻率為120~140Hz,導向部分的1階頻率為121.41Hz,接近120Hz,所以整個導向部分存在共振的風險,應盡量提高前幾階頻率,從而避免發生共振。
從導向機構模態振型圖可以看出,導柱在空間發生彎曲,且隨著模態階次的提高,彎曲的導柱越來越多且振型越來越復雜。立板在低階頻率時有明顯變形,而在高階頻率時變形不大,說明立板剛度需采取措施進一步加強。整體在第7階、第9階出現明顯的變形,說明整個機構的抗變形能力較強。低階次模態下相鄰兩階的固有頻率之差較小,因此容易引發共振效應。

表1 導柱及部件固有頻率和振型
3 諧響應分析
模態分析結果的位移值是一個相對的量值,它表征各節點在某一階固有頻率上振動量的相對比值,反映該固有頻率上振動的傳遞情況,并不反映實際振動的數值。為了得到導柱和立板在一個頻率范圍內的具體振動情況及沿各方向的位移頻率響應關系,還需要在模態分析的基礎上進行諧響應分析。

圖3 導向機構1~6階振型圖
3.1 載荷和邊界條件
邊界條件與模態分析中的邊界條件相同。整個導向部分所受載荷為立板面上的扭矩M=3.2e6Nmm,夾具所夾鋁導桿上的頂鍛力F=5000KN。而頂鍛力是在摩擦焊接后,當主軸停轉時所加的靜力,不屬于動態載荷。所以在此分析中,只有動態的扭矩載荷。
3.2 求解及結果分析
在模態分析中,低階模態的作用占主要地位,高階模態影響較小,且階數越高,影響越小。因此本課題選取模態分析的前10階頻率作為諧響應分析的頻率范圍,即立板取0~249Hz,導柱取0~349Hz,采用模態疊加法計算得出實際工況下立板和導柱位移響應頻率曲線如圖4和圖5所示。

圖4 導向機構立板振幅頻率諧響應曲線

圖5 導向機構導柱振幅頻率諧響應曲線
通過響應曲線可以看出,立板分別沿X、Y向均在頻率90Hz時振幅達到最大,分別為3.55e-2mm和1.08e-2mm,但是第一階頻率為121.41Hz大于90Hz,所以Z向振幅很微小可以忽略不計。導柱分別沿X、Y向分別在頻率90Hz和200Hz時振幅達到最大,分別為1.4e-2mm和6.31e-4mm,與導向部分第四階固有頻率接近,但是振幅不是很大,基本也可保證導柱的安全使用。Z向振幅亦很微小可忽略。實際工作中要注意避免外部激勵頻率落在上述頻率附近。
從分析中可得出如下結論:(1)立板X、Y向前幾階固有頻率均避開80~100Hz頻率段,其他頻率段位移變化亦不大,說明前幾階頻率對立板X、Y向剛度影響不大,且基本不存在共振的風險;(2)導柱X、Y向前幾階固有頻率亦避開80~100Hz頻率段,接近第四階頻率時,有較小的位移,這是由于在摩擦焊接時,導柱要承受一部分XOY平面內的扭矩,因此產生小位移,說明對導柱剛度影響較小。
4 結語
本文緊緊圍繞大噸位專用摩擦焊機的關鍵技術難題,利用SolidWorks和ANSYSWorkbench仿真軟件,對摩擦焊機的導向機構進行仿真動力學分析,得到的數據經過試驗檢驗真實可靠,并已應用到這種新型摩擦焊機中,圖6所示為應用本文數據后的摩擦焊機。

圖6 新型大噸位摩擦焊機
本文得出以下結論:(1)運用Solidworks對摩擦焊機導向機構建模,基于ANSYSWorkbench對導向機構進行模態分析,得出其前6階模態,為后續的諧響應分析提供了參數依據。(2)對導向機構立板和導柱進行了諧響應分析,根據響應頻率曲線可以分析得出,低階固有頻率已避開發生共振頻率,其他頻率對導柱剛度影響較小,但在使用過程中最好還是避開此頻率段。(3)計算結果為類似重型機構的設計提供了重要的理論依據,也為后續改進設計提供了數據支持。
[1]劉濤,王衛輝,鹿飛,袁仁武. 基于Workbench的箱形伸縮臂模態及諧響應分析[J].制造業自動化,2015,02:80-82.
[2]王越,張寧.基于遺傳算法的無線傳感網絡定位參數優化[J].計算機應用與軟件,2010,7(27):91-93.
[3]楊紅義,潘靜,胡小男.基于ANSYS的汽車起重機吊臂的動態分析[J].機械設計與制造,2011,01:225-227.
TH128
A
1671-0711(2017)05(下)-0179-03
甘肅省高等學校科研項目(2016A-147)。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
計算物理(2014年2期)2014-03-11 17:01:39
終身教育研究(2014年5期)2014-02-28 01:23:06
