低耦合度3T1R并聯(lián)操作手設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析
2017-06-05 15:08:28沈惠平尹洪賀邵國為楊廷力
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2017年5期
沈惠平 尹洪賀 邵國為 楊廷力
(常州大學(xué)現(xiàn)代機(jī)構(gòu)學(xué)研究中心, 常州 213016)
低耦合度3T1R并聯(lián)操作手設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析
沈惠平 尹洪賀 邵國為 楊廷力
(常州大學(xué)現(xiàn)代機(jī)構(gòu)學(xué)研究中心, 常州 213016)
基于方位特征(POC)方程的并聯(lián)機(jī)構(gòu)拓?fù)浣Y(jié)構(gòu)設(shè)計(jì)理論和機(jī)構(gòu)結(jié)構(gòu)降耦原理,設(shè)計(jì)了一種低耦合度能實(shí)現(xiàn)三平移一轉(zhuǎn)動(dòng)(3T1R)的SCRAR并聯(lián)操作手機(jī)構(gòu)。首先,闡述了該機(jī)構(gòu)的組成,計(jì)算了該機(jī)構(gòu)的耦合度k=1;然后,根據(jù)該機(jī)構(gòu)的幾何特點(diǎn)和運(yùn)動(dòng)約束,通過建立輸入?yún)?shù)與動(dòng)平臺(tái)輸出位姿參數(shù)間的約束方程,運(yùn)用運(yùn)動(dòng)學(xué)序單開鏈法原理求解了位置正解的數(shù)值解,導(dǎo)出了其位置反解的解析解,用實(shí)例驗(yàn)證了位置正、反解的準(zhǔn)確性;最后,基于位置反解得到了機(jī)構(gòu)位置工作空間的形狀與大小及Z向各截面形狀,并基于Jacobian矩陣對(duì)機(jī)構(gòu)奇異位形進(jìn)行了分析。結(jié)果表明:該機(jī)構(gòu)比H4、I4結(jié)構(gòu)簡單,在一組相同等效尺寸參數(shù)下其工作空間大、轉(zhuǎn)動(dòng)能力強(qiáng)。
并聯(lián)機(jī)構(gòu); 方位特征集; 運(yùn)動(dòng)學(xué); 三平移一轉(zhuǎn)動(dòng); 低耦合度; 工作空間
引言
少自由度并聯(lián)機(jī)構(gòu)具有驅(qū)動(dòng)構(gòu)件少、工作空間大、運(yùn)動(dòng)耦合較弱以及制造成本低等優(yōu)點(diǎn)。其中,對(duì)四自由度三平移一轉(zhuǎn)動(dòng)(3T1R)并聯(lián)機(jī)構(gòu)的研究、設(shè)計(jì)與應(yīng)用還相對(duì)較少,但這類機(jī)構(gòu)在工業(yè)生產(chǎn)、包裝、電子產(chǎn)品的裝配以及醫(yī)療等相關(guān)領(lǐng)域,應(yīng)用前景廣闊。
黃真等[1]基于螺旋理論,提出了一種4-URU型3T1R并聯(lián)機(jī)器人;金瓊等[2-3]基于方位特征輸出矩陣和單開鏈理論,提出了一類3T1R并聯(lián)機(jī)器人,并申請(qǐng)了一組5個(gè)3T1R并聯(lián)機(jī)構(gòu)的專利;黃田等[4]在H4、I4、Par4等相似機(jī)器人主體構(gòu)造的基礎(chǔ)上,發(fā)明了一種3T1R的Cross-Ⅳ型高速搬運(yùn)機(jī)器人并實(shí)現(xiàn)產(chǎn)業(yè)化;劉辛軍等[5]研制了一臺(tái)單動(dòng)平臺(tái)且能夠?qū)崿F(xiàn)3T1R的X4型并聯(lián)機(jī)構(gòu)樣機(jī)。
PIERROT等[6-7]研制了四自由度3T1R并聯(lián)機(jī)器人樣機(jī),能實(shí)現(xiàn)高速抓取;SALGADO等[8]設(shè)計(jì)了一種新型3T1R并聯(lián)操作手,給出了封閉的正反解;KIM等[9]綜合了一種大工作空間的3T1R并聯(lián)機(jī)構(gòu),同時(shí)建立了該機(jī)構(gòu)的運(yùn)動(dòng)學(xué)模型;RICHARD等[10]研制了一種3T1R并聯(lián)機(jī)構(gòu)的樣機(jī);BRIOT等[11]提出了一種能實(shí)現(xiàn)3T1R的高速抓取的并聯(lián)機(jī)構(gòu),建立了機(jī)構(gòu)正反解模型,并對(duì)機(jī)構(gòu)的工作空間進(jìn)行了分析;作者團(tuán)隊(duì)最近又綜合出一類13個(gè)3T1R新機(jī)構(gòu)[12]。
以上研究對(duì)(3T1R)并聯(lián)操作手的研發(fā)起到了重要的推動(dòng)作用,但這些機(jī)構(gòu)的耦合度較大(k=2),因此,其運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)分析,特別是位置正解求解復(fù)雜。
本文提出一種結(jié)構(gòu)比已有的H4、I4、Par4、Cross-IV、X4簡單、低耦合度SCRAR并聯(lián)機(jī)構(gòu),分析計(jì)算機(jī)構(gòu)的耦合度;采用矢量法建立機(jī)構(gòu)位置方程,并采用序單開鏈法的一維搜索法求得位置正解的數(shù)值解;基于導(dǎo)出的位置逆解解析解,對(duì)機(jī)構(gòu)的工作空間進(jìn)行分析;通過導(dǎo)出該機(jī)構(gòu)的Jacobian矩陣分析機(jī)構(gòu)的奇異位形。
1 3T1R并聯(lián)機(jī)構(gòu)的拓?fù)湓O(shè)計(jì)及結(jié)構(gòu)分析
1.1 機(jī)構(gòu)設(shè)計(jì)與描述
基于方位特征(POC)方程的并聯(lián)機(jī)構(gòu)拓?fù)浣Y(jié)構(gòu)設(shè)計(jì)理論[13-14 ]與機(jī)構(gòu)結(jié)構(gòu)降耦原理[15],提出的低耦合度3T1R機(jī)構(gòu)如圖1所示[16],它由動(dòng)平臺(tái)、靜平臺(tái)、2條RSS型無約束支鏈及1條混合支鏈(HSOC)組成;靜平臺(tái)上的轉(zhuǎn)動(dòng)副可取為R11⊥R21,R31⊥R41,而動(dòng)平臺(tái)上的轉(zhuǎn)動(dòng)副R14的軸線須平行于其法線。
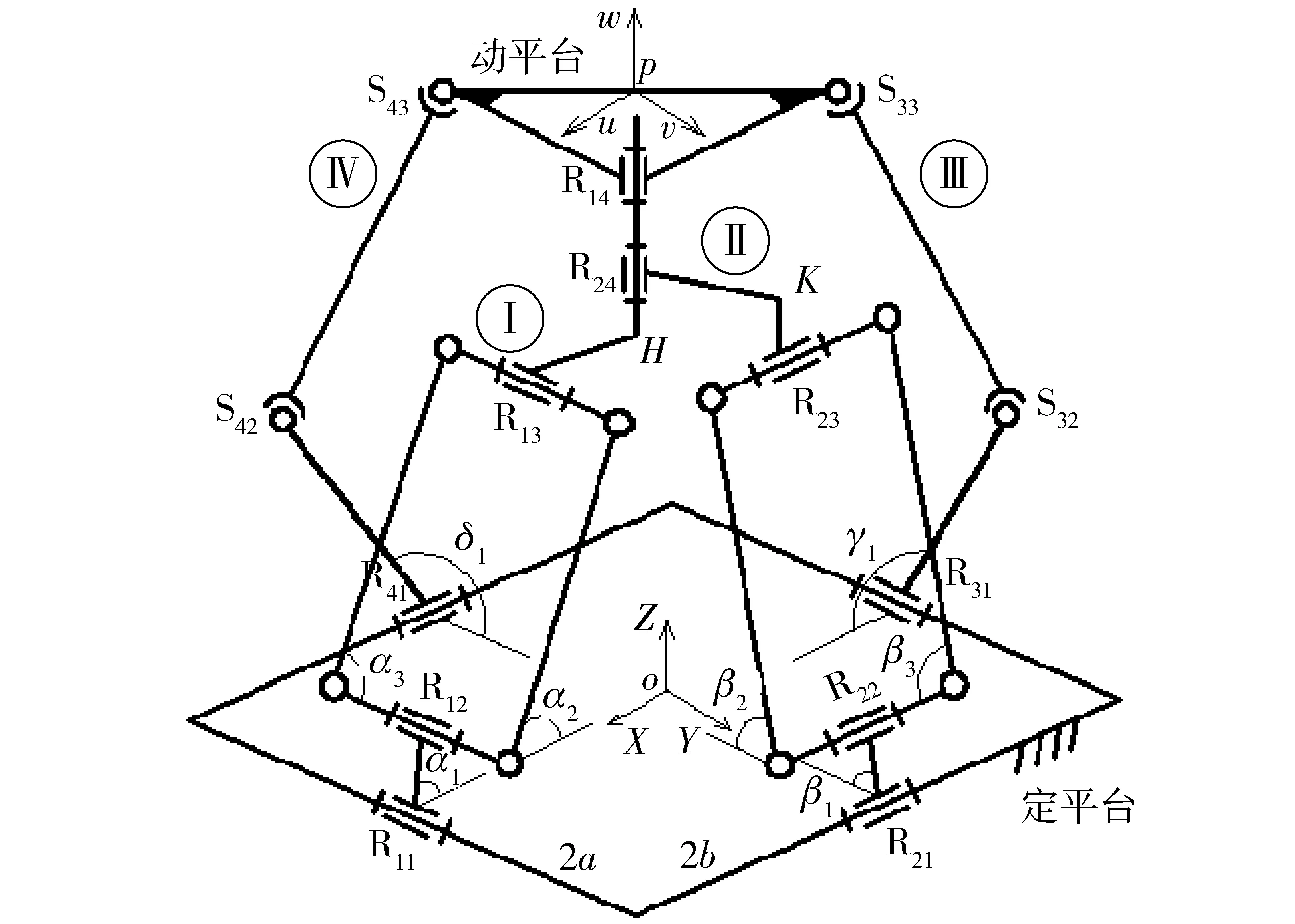
圖1 3T1R并聯(lián)機(jī)構(gòu)簡圖Fig.1 Sketch of 3T1R parallel mechanism
混合支鏈?zhǔn)怯?個(gè)子混合支鏈[17](-R∥R(-P4R-)∥R⊥R-)的末端轉(zhuǎn)動(dòng)副軸線重合后,又串聯(lián)轉(zhuǎn)動(dòng)副R14構(gòu)成的,其末端產(chǎn)生三平移一轉(zhuǎn)動(dòng)輸出運(yùn)動(dòng),而2條RSS型無約束支鏈產(chǎn)生三平移三轉(zhuǎn)動(dòng)輸出運(yùn)動(dòng),可求得該機(jī)構(gòu)自由度為4[12],當(dāng)在靜平臺(tái)上的4個(gè)轉(zhuǎn)動(dòng)副為驅(qū)動(dòng)副時(shí),該機(jī)構(gòu)動(dòng)平臺(tái)即可實(shí)現(xiàn)三平移以及繞R14軸線轉(zhuǎn)動(dòng)的輸出運(yùn)動(dòng)。
H4、I4、Par4、Cross-IV、X4等機(jī)構(gòu),采用4條完全相同的含平行四邊形的復(fù)雜支鏈,且耦合度k均為2,正向運(yùn)動(dòng)學(xué)求解復(fù)雜;而該機(jī)構(gòu)僅采用2條含平行四邊形的子混合支鏈,且耦合度k=1,因此,該3T1R機(jī)構(gòu)的機(jī)械結(jié)構(gòu)比已有的H4、I4、Par4、Cross-IV、X4等更簡單,而正向運(yùn)動(dòng)學(xué)求解更簡單。
為理解方便,將圖1展開成平面圖,如圖2所示。
1.2 機(jī)構(gòu)耦合度計(jì)算
為完成并聯(lián)機(jī)構(gòu)位置分析,需對(duì)機(jī)構(gòu)進(jìn)行結(jié)構(gòu)分解。基于序單開鏈機(jī)構(gòu)組成原理[14],自由度為f的并聯(lián)機(jī)構(gòu)PKM可看作是由v個(gè)單開鏈(SOCj,j=1,2,…,v)依次連接而成,也可以認(rèn)為是由f個(gè)驅(qū)動(dòng)副和自由度為0的運(yùn)動(dòng)鏈組成;自由度為0的運(yùn)動(dòng)鏈又可以分解成一些基本運(yùn)動(dòng)鏈。因此,該機(jī)構(gòu)可分解為
其中
式中mj——第j個(gè)SOCj的運(yùn)動(dòng)副數(shù)fi——第i個(gè)運(yùn)動(dòng)副的自由度Ij——第j個(gè)SOCj的驅(qū)動(dòng)副數(shù)ξLj——第j個(gè)獨(dú)立回路的獨(dú)立位移方程數(shù)Δj——SOCj的約束度
機(jī)構(gòu)的耦合度為
可知,該并聯(lián)機(jī)構(gòu)可建立含一個(gè)變量的非線性位置方程,并可通過一維搜索法求得該機(jī)構(gòu)的位置正解。
2 位置正解分析
2.1 基于序SOC的機(jī)構(gòu)位置正解求解基本原理
由文獻(xiàn)[13-14]可知,單開鏈的約束度有正值、零、負(fù)值3種形式,因此:
2.2 機(jī)構(gòu)參數(shù)標(biāo)注及坐標(biāo)系的建立
靜坐標(biāo)系oXYZ建立在靜平臺(tái)的中心,且X軸與R11R31連線重合,Y軸與R21R41連線重合,Z軸由右手法則確定;動(dòng)坐標(biāo)系puvw位于動(dòng)平臺(tái)斜邊S43S33中點(diǎn),u軸平行于直線R14S33,v軸平行于直線R14S43,w軸同樣由右手法則確定。
設(shè)靜平臺(tái)是長和寬分別為2a、2b矩形;動(dòng)平臺(tái)為等腰直角三角形,直角邊長為2m2。其他桿長為:lHR13=m1,lHR24=n1;lKR24=m′1,lKR23=n′1;lR14R24=q1,lR11R12=lR21R22=la;lR31S32=lR41S42=la1;lS32S33=lS42S43=lb1;4R平行四邊形機(jī)構(gòu)的長邊長為lb。
4個(gè)主動(dòng)副R11、R21、R31、R41的輸入角分別為α1、β1、γ1、δ1(圖1);Ⅰ、Ⅱ支鏈中平行四邊形平面與靜平臺(tái)底面的夾角分別為α2、β2,而其內(nèi)擺角分別為α3、β3,動(dòng)平臺(tái)繞R14軸轉(zhuǎn)動(dòng)的轉(zhuǎn)角為姿態(tài)轉(zhuǎn)角γ。
該機(jī)構(gòu)位置正解問題可描述為:已知主動(dòng)副輸入轉(zhuǎn)角α1、β1、γ1、δ1,求動(dòng)平臺(tái)的位置(x,y,z)和姿態(tài)轉(zhuǎn)角γ。假設(shè)α3為虛擬已知變量。
2.3 約束度為正值的SOC1上各運(yùn)動(dòng)副的求解
在I支鏈上,由直角坐標(biāo)法可依次通過R12、R13、R24、R14點(diǎn)坐標(biāo),最終求得p點(diǎn)坐標(biāo),即
(1)
同樣,由Ⅱ支鏈可求得p點(diǎn)坐標(biāo),即
(2)
由式(1)、(2)可得
(3)
其中
消去式(3)中的β2、β3則有
令
α2=2arctank1
(4)
則有
其中
得
這樣由式(4)可知,α2是虛擬變量α3的函數(shù)。
2.4 約束度為零的SOC2上各運(yùn)動(dòng)副的求解
由Ⅲ支鏈,分別得S32、S33在靜坐標(biāo)系中坐標(biāo)為
(5)
(6)
由桿長約束lS32S33=lb1,整理并化簡得
A1sinγ+B1cosγ+C1=0
其中
設(shè)
γ=2arctank2
(7)
則
解得
由式(7)知,轉(zhuǎn)動(dòng)角γ也為虛擬變量α3的函數(shù)。
2.5 在約束度為負(fù)值的SOC3上建立位置相容方程
同樣,由Ⅳ支鏈,分別得到S42、S43的坐標(biāo)
(8)
(9)
由桿長約束lS42S43=lb1,則有
于是,通過改變?chǔ)?的賦值,使f(α3)=0;再將此時(shí)得到的α3代入式(1),即可得到p(x,y,z),代入式(7),即可得姿態(tài)角γ。
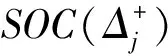
綜上,上述各運(yùn)動(dòng)副的位置求解可按圖3所示的流程進(jìn)行求解。
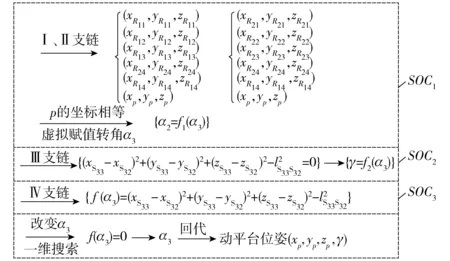
圖3 機(jī)構(gòu)位置正解的流程圖Fig.3 Flow chart of forward position solution
3 位置逆解
該機(jī)構(gòu)的反解問題可描述為:已知?jiǎng)悠脚_(tái)的位置(x,y,z)及姿態(tài)角γ,求主動(dòng)副輸入轉(zhuǎn)角α1、β1、γ1、δ1。
3.1 求主動(dòng)副R11的輸入角α1
對(duì)I支鏈,由式(1)可得
(10)
(11)
z=lasinα1+lbsinα3sinα2+q1+n1
(12)
由式(11)可得
由式(10)~(12)得
(P1+lacosα1)2+(P2-lasinα1)2=P3
其中
整理可得
P4+P5cosα1+P6sinα1=0
(13)
其中
令
ta=tan(α1/2)
(14)
解得
3.2 求主動(dòng)副R21的輸入角β1
對(duì)Ⅱ支鏈,運(yùn)用同樣的方法,由式(2)可得
β1=2arctantb
(15)
其中
3.3 求主動(dòng)副R31的輸入角γ1
由Ⅲ支鏈桿長約束lS32S33=lb1,及式(10)~(12),并整理可得
P14+P15cosγ1+P16sinγ1=0
其中
令
γ1=2arctantc
(16)
則
解得
3.4 求主動(dòng)副R41的輸入角δ1
由Ⅳ支鏈上的桿長約束lS42S43=lb1,并整理得
P19+P20cosδ1+P21sinδ1=0

令
δ1=2arctantd
(17)
則
解得
綜上可知,該機(jī)構(gòu)存在24=16組位置反解。
4 實(shí)例驗(yàn)算
4.1 正解算例
為便于性能比較,參照H4、I4機(jī)器人的一組典型的結(jié)構(gòu)尺寸參數(shù)[18],該機(jī)構(gòu)取相同等效參數(shù)如表1所示。
表1 機(jī)構(gòu)的尺寸參數(shù)Tab.1 Structure parameters of PM cm
給定兩組主動(dòng)輸入角:①α1=138.616°;β1=127.913°;γ1=117.852°;δ1=131.396°。②α1=138.059°;β1=136.691°;γ1=146.064°;δ1=146.855°。
通過一維搜索,運(yùn)用式(1)、(7)可求得4組實(shí)數(shù)正解,如表2所示。
4.2 逆解算例
將表2中①正解中的No.2數(shù)據(jù),代入逆解式(14)~(17)中,可得16組實(shí)數(shù)反解(略),其中,一組反解為:α1=138.617°;β1=127.915°;γ1=117.852°;δ1=131.396°。
可知,它與給定的第①組輸入角一致,故認(rèn)為正反解求解正確。
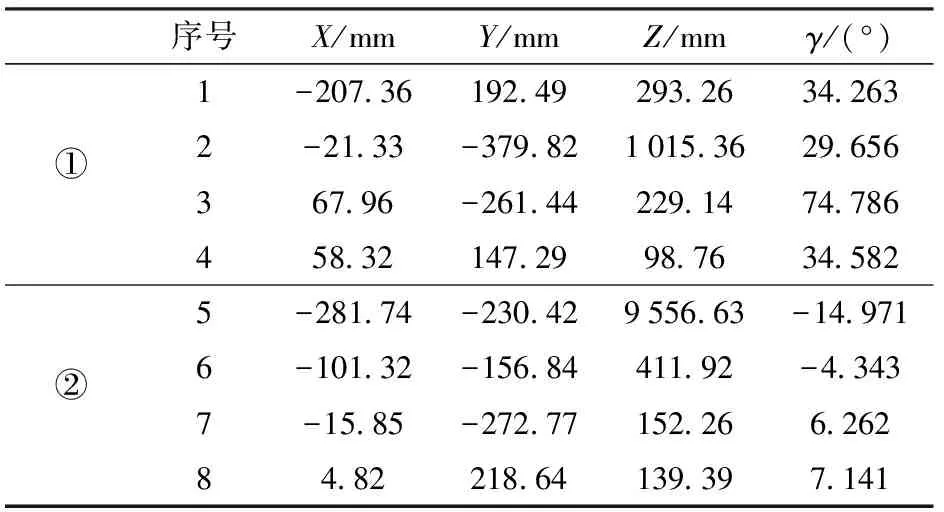
表2 3T1R機(jī)構(gòu)位姿正解的數(shù)值解Tab.2 Numerical forward solutions of PM
5 工作空間和轉(zhuǎn)動(dòng)能力分析
5.1 工作空間分析
運(yùn)用邊界值搜索法求解機(jī)構(gòu)的工作空間的思路是:基于機(jī)構(gòu)的位置逆解,查找該工作空間內(nèi)所有滿足桿長約束、轉(zhuǎn)角約束、干涉約束的點(diǎn)。給定空間內(nèi)的點(diǎn)對(duì)應(yīng)的驅(qū)動(dòng)角α1、β1、γ1、δ1和內(nèi)擺角α3、β3,若滿足約束條件,則該點(diǎn)在工作空間內(nèi),否則在工作空間外。
當(dāng)取表1所示的尺寸參數(shù)時(shí),空間三維搜索范圍為:0≤Z≤1 200,-π≤θ≤π,0≤ρ≤1 000(θ、ρ分別為柱坐標(biāo)系中搜索角度和搜索半徑);約束條件:-π≤α1(β1,δ1,θ1)≤π。利用Matlab求得的工作空間的形狀如圖4所示,其Z軸截面圖如圖5所示。
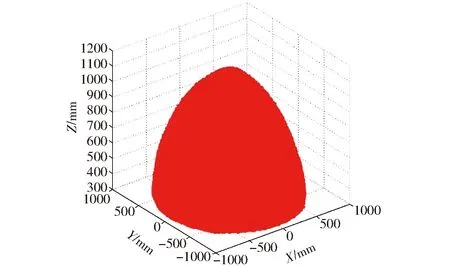
圖4 工作空間三維立體圖Fig.4 Three-dimensional workspace of PM
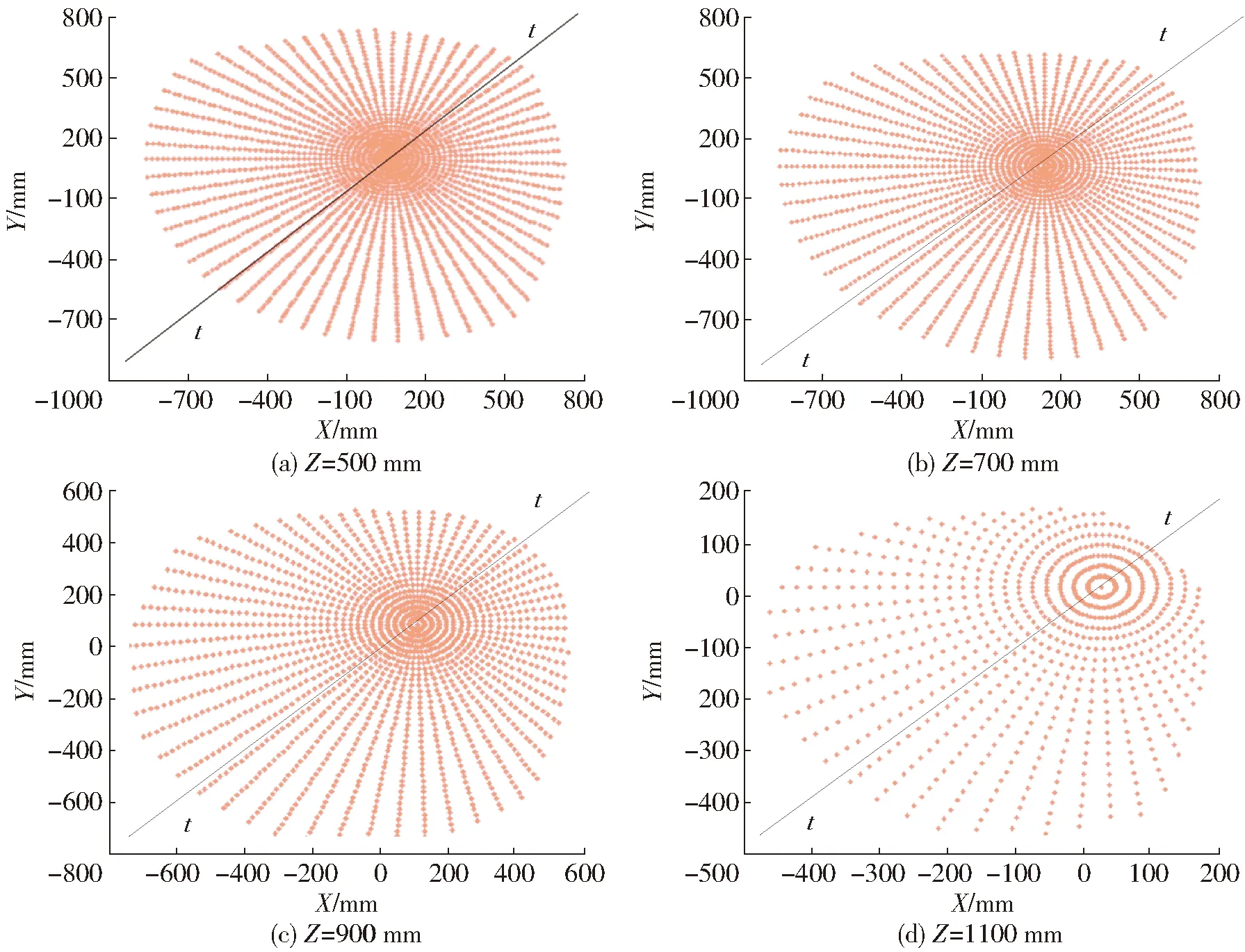
圖5 工作空間Z軸截面圖Fig.5 Section views of Z axis
由圖4和圖5可知:
(1)機(jī)構(gòu)的工作空間較大,邊界較光滑,且整個(gè)工作空間連續(xù)、無空洞。
(2)機(jī)構(gòu)工作空間及其Z軸截面圖,關(guān)于t-t線基本對(duì)稱。
(3)隨著Z的增加,截面面積逐漸變小,邊界趨于光滑,當(dāng)Z∈[500 mm,1 100 mm]時(shí),工作空間對(duì)稱性較好。
(4)在不考慮運(yùn)動(dòng)副轉(zhuǎn)角約束、連桿干涉,以及相同參數(shù)及搜索范圍得的條件下,該機(jī)構(gòu)工作空間均比I4R(H4)、CrossIV-3大,具體如下:
①引用文獻(xiàn)[18]的相應(yīng)參數(shù),給定搜索范圍:0≤ρ≤1 000、500 mm≤z≤1 150 mm,計(jì)算出I4R的工作空間體積為 6.167×108mm3,而該機(jī)構(gòu)為7.694×108mm3,因此,該機(jī)構(gòu)工作空間體積比I4R機(jī)器人增加了24.76%。
②引用文獻(xiàn)[19]的相應(yīng)參數(shù),給定搜索范圍:0≤ρ≤1 000、766 mm≤z≤1 016 mm,CrossIV-3的工作空間體積為4.427×108mm3,而該機(jī)構(gòu)為5.089×108mm3,因此,該機(jī)構(gòu)工作空間體積相比CrossIV-3增加了14.95%。
5.2 轉(zhuǎn)動(dòng)能力分析
轉(zhuǎn)動(dòng)能力[20]分析是評(píng)估并聯(lián)機(jī)構(gòu)轉(zhuǎn)動(dòng)角度能夠到達(dá)范圍的大小。
以下取相同高度Z=1 000 mm,分別計(jì)算本文機(jī)構(gòu)、H4機(jī)構(gòu)在X-Y平面上各點(diǎn)的轉(zhuǎn)角最大值γmax、最小值γmin的分布,如圖6所示。
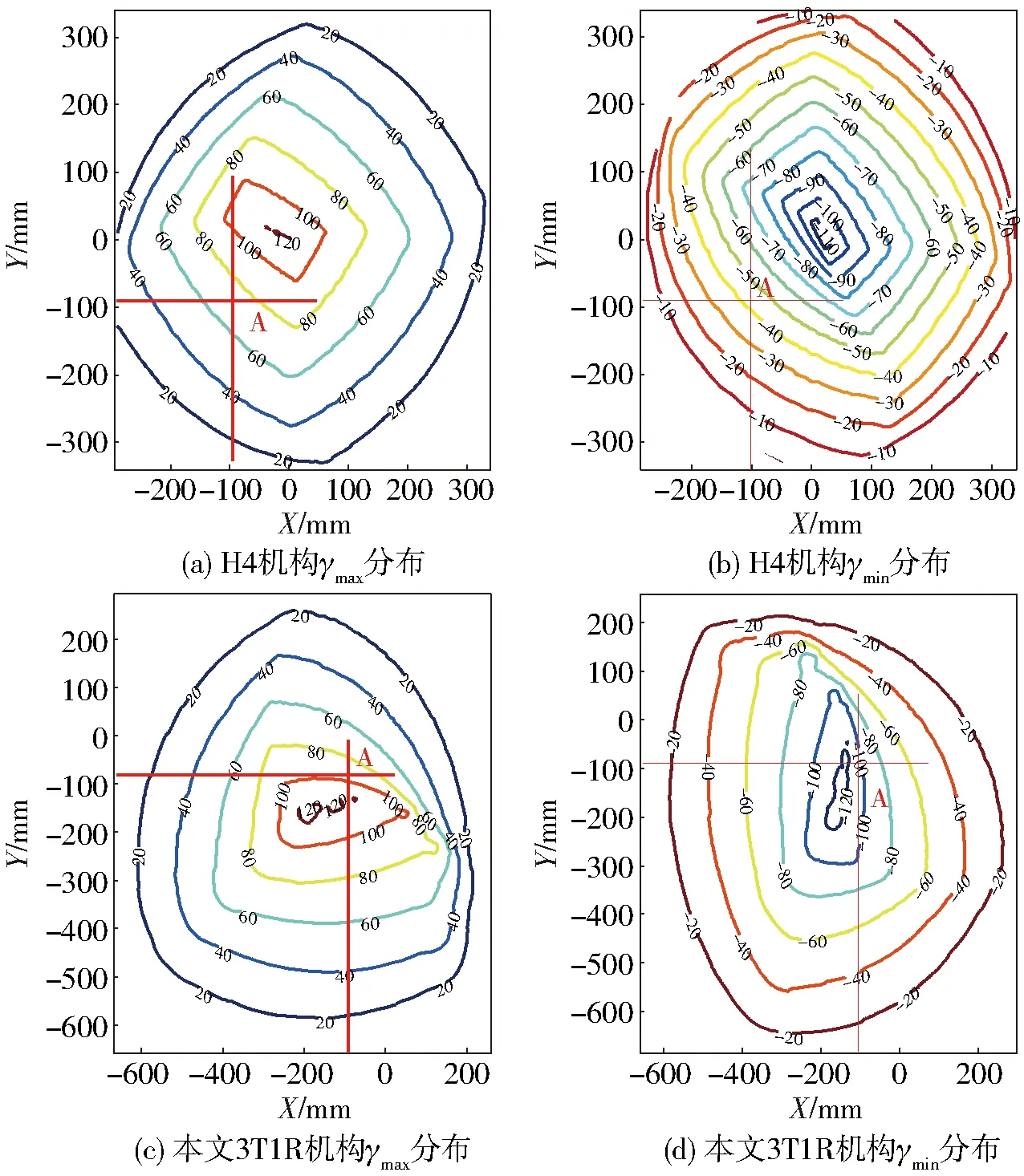
圖6 本文3T1R機(jī)構(gòu)與H4機(jī)構(gòu)的轉(zhuǎn)動(dòng)能力比較Fig.6 Comparisons of rotational capacity between 3T1R and H4 PM
對(duì)比圖6a和圖6c,本文機(jī)構(gòu)γmax∈[0°,120°],H4的γmax∈[0°,120°];對(duì)比圖6b和圖6d,本文機(jī)構(gòu)γmin∈[-120°,0°],H4的γmin∈[-110°,0°]。因此,本文提出的機(jī)構(gòu)動(dòng)平臺(tái)轉(zhuǎn)角范圍比H4機(jī)構(gòu)大。
進(jìn)一步,在機(jī)構(gòu)工作空間內(nèi)取一點(diǎn),例:A點(diǎn),其坐標(biāo)A(-100,-90,1 000),H4機(jī)構(gòu)的轉(zhuǎn)角范圍是[-50°,70°],本文機(jī)構(gòu)的轉(zhuǎn)角范圍是[-100°,100°],比H4機(jī)構(gòu)大了40%。因此,該機(jī)構(gòu)動(dòng)平臺(tái)可以無需特殊轉(zhuǎn)角放大裝置,便可獲得較大的轉(zhuǎn)角范圍。
6 奇異位形分析
6.1 基本原理及方法
當(dāng)約束方程線性相關(guān),或者說機(jī)構(gòu)在某位形下失去一個(gè)或者多個(gè)方向上的約束時(shí),機(jī)構(gòu)處于位形奇異狀態(tài)。因此,可通過檢驗(yàn)約束方程的雅可比矩陣是否行滿秩,來判斷約束方程的相關(guān)性。
R13點(diǎn)坐標(biāo),可同時(shí)由以下2個(gè)矢量方程
lOR11+lR11R12+lR12R13=lOR13lOO′+lO′R13=lOR13
得到
(18)
同樣,點(diǎn)S43、S33、R23坐標(biāo)也可得到,即有
(19)
(20)
(21)
其中,γ2、γ3與γ4及γ5、γ6與γ7,分別為S32S33桿、S42S43桿與靜坐標(biāo)系X、Y、Z軸的夾角。
對(duì)式(18)~(21)化簡整理,然后等式兩邊分別對(duì)時(shí)間t求一階導(dǎo)數(shù)得
(22)
(23)
(24)
(25)

JpV=Jqω
(26)
其中
令det(Jp)=0,可得Jp矩陣行列式解的集合A為
A={tanα2+tanβ2+2tanγ2=0}
(27)
令det(Jq)=0,而Jq矩陣行列式解的集合B為
B=B1∪B2∪B3∪B4
其中
(28)
(29)
(30)
(31)
6.2 奇異位形分析
(1)第一類奇異:矩陣Jp奇異而矩陣Jq非奇異,即det(Jp)=0且det(Jq)≠0。
此時(shí),機(jī)構(gòu)處于工作空間邊界或者位置反解數(shù)目發(fā)生變化時(shí)的位形。對(duì)于該機(jī)構(gòu)而言,即3個(gè)從動(dòng)角滿足關(guān)系式(27)時(shí),即發(fā)生這類奇異。
(2)第二類奇異:即det(Jq)=0且det(Jp)≠0。
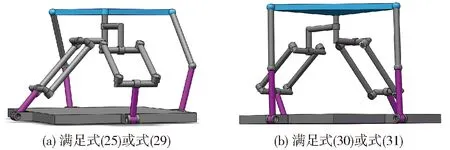
圖7 第二類奇異位形圖Fig.7 Sketches of the second kind of singularity
此時(shí),盡管驅(qū)動(dòng)桿被鎖定,機(jī)構(gòu)的動(dòng)平臺(tái)仍具有一定自由度,此時(shí)機(jī)構(gòu)將失去剛度,無法承受任何載荷。對(duì)本機(jī)構(gòu)而言,滿足式(28)~(31)中的任意一個(gè)式子,即發(fā)生該類奇異,如圖7所示(也即當(dāng)4條支鏈中任意一條支鏈處于拉直共線或重疊共線時(shí))。
(3)第三類奇異:即det(Jp)=0且det(Jq)=0。
這種奇異位形只有當(dāng)上述第一、二類奇異同時(shí)發(fā)生時(shí)才會(huì)產(chǎn)生,此時(shí),機(jī)構(gòu)將失去自由度、原有的運(yùn)動(dòng)特性。
7 結(jié)論
(1)提出了一種低耦合度(k=1)的四自由度3T1R并聯(lián)機(jī)構(gòu),該機(jī)構(gòu)在結(jié)構(gòu)上具有較好的對(duì)稱性, 與H4、Cross-IV、X4機(jī)構(gòu)相比,更為簡單、制造裝配更為容易。
(2)基于序單開鏈法原理,建立了機(jī)構(gòu)位置正解求解模型:建立一個(gè)含1個(gè)變量的桿長約束方程,并用一維搜索求解,得到了機(jī)構(gòu)的全部實(shí)數(shù)位置正解。該方法物理意義明確,計(jì)算簡便;同時(shí)利用Matlab軟件驗(yàn)證了正反解算法的正確性。
(3)基于位置反解的機(jī)構(gòu)工作空間分析和轉(zhuǎn)動(dòng)能力分析表明:在一組相同等效典型的結(jié)構(gòu)參數(shù)下,該機(jī)構(gòu)工作空間相比I4(H4)、CrossIV-3 分別提高24.76%、14.95%,轉(zhuǎn)動(dòng)能力也有提高。
(4)求解了機(jī)構(gòu)的雅可比矩陣,并據(jù)此探討了機(jī)構(gòu)的三類奇異位形發(fā)生條件及其位置。
1 黃真,趙鐵石,李秦川.空間少自由度并聯(lián)機(jī)器人機(jī)構(gòu)的基礎(chǔ)綜合理論[C]∥第一屆國際機(jī)械工程學(xué)術(shù)會(huì)議,2000:90-91. HUANG Zhen,ZHAO Tieshi,LI Qinchuan.A screw approach to deficient-DOF spatial parallel mechanisms constructing and its application[C]∥The First International Conference on Mechanical Engineering,2000:90-91.(in Chinese)
2 金瓊, 楊廷力, 劉安心,等. 基于單開鏈單元的三平移一轉(zhuǎn)動(dòng)并聯(lián)機(jī)器人機(jī)構(gòu)型綜合及分類[J]. 中國機(jī)械工程, 2001, 12(9):1038-1043. JIN Qiong,YANG Tingli, LIU Anxin, et al. Kinematics analysis of a parallel pneumatic and hydraulic linkage based on single-opened-chain[J].China Mechanical Engineering, 2001,12(9):1038-1043. (in Chinese)
3 楊廷力,金瓊,羅玉峰, 等.用于虛軸機(jī)床與機(jī)器人等的一類(三平移一轉(zhuǎn)動(dòng))并聯(lián)機(jī)構(gòu):中國, 200310106012.4[P].2004-09-15.
4 黃田, 趙學(xué)滿, 梅江平,等. 一種具有三維平動(dòng)一維轉(zhuǎn)動(dòng)的并聯(lián)機(jī)構(gòu):中國,202528189U[P]. 2012-11-14.
5 劉辛軍,謝福貴,王立平,等.一種可實(shí)現(xiàn)SCARA運(yùn)動(dòng)的四自由度單動(dòng)平臺(tái)并聯(lián)機(jī)構(gòu):中國,201210435375.1[P].2013-02-13.
6 PIERROT F, NABAT V, COMPANY O, et al. Optimal design of a 4-DOF parallel manipulator: from academia to industry[J]. IEEE Transactions on Robotics, 2009, 25(2):213-224.
7 COMPANY O, MARQUET F, PIERROT F. A new high-speed 4-DOF parallel robot synthesis and modeling issues[J]. IEEE Transactions on Robotics & Automation, 2003, 19(3):411-420.
8 SALGADO O, ALTUZARRA O, PETUYA V, et al. Synthesis and design of a novel 3T1R fully-parallel manipulator[J]. Journal of Mechanical Design, 2008, 130(4):137-139.
9 KIM S M, KIM W, YI B J. Kinematic analysis and optimal design of a 3T1R type parallel mechanism[C]∥IEEE International Conference on Robotics and Automation, 2009:2199-2204.
10 RICHARD P L, GOSSELIN C M, KONG X. Kinematic analysis and prototyping of a partially decoupled 4-DOF 3T1R parallel manipulator[J]. Journal of Mechanical Design, 2007, 129(6):611-616.
11 BRIOT S, BONEV I A. Pantopteron-4: a new 3T1R decoupled parallel manipulator for pick-and-place applications[J]. Mechanism & Machine Theory, 2010, 45(5):707-721.
12 YANG Tingli,LIU Anxin,SHEN Huiping, et al. Topological structure synthesis of 3T1R parallel mechanism based on POC equations[C]∥2016 Proceedings of 9th International Conference on Intelligent Robotics and Applications, ICIRA, 2016:147-161.
13 楊廷力.機(jī)器人機(jī)構(gòu)拓?fù)浣Y(jié)構(gòu)學(xué)[M].北京:機(jī)械工業(yè)出版社, 2004.
14 楊廷力,劉安心,羅玉峰,等.機(jī)器人機(jī)構(gòu)拓?fù)浣Y(jié)構(gòu)設(shè)計(jì)[M]. 北京:科學(xué)出版社,2012.
15 SHEN Huiping,YANG Liangjie,MENG Qingmei,et al.Topological structure coupling-reducing of parallel mechanisms[C]∥2015 IFToMM Wold Congress,2015.
16 沈惠平,強(qiáng)恒存,邵國為,等. 一種低耦合度三運(yùn)動(dòng)副動(dòng)平臺(tái)的三平移一轉(zhuǎn)動(dòng)并聯(lián)機(jī)器人機(jī)構(gòu):中國,201610141468.1[P].2016-03-14.
17 廖明,劉安心,沈惠平,等.并聯(lián)機(jī)構(gòu)方位特征集的符號(hào)推導(dǎo)方法[J/OL].農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(3):395-404. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160356&flag=1.DOI:10.6041/j.issn.1000-1298.2016.03.056. LIAO Ming,LIU Anxin,SHEN Huiping, et al.Symbolic derivation of position and orientation characteristics of parallel mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):395-404.(in Chinese)
18 劉平松. I4型并聯(lián)機(jī)器人全域性能及其優(yōu)化研究[D].南京:南京理工大學(xué), 2013. LIU Pingsong.Global performance and optimization of I4R parallel robot[D].Nanjing:Nanjing University of Science and Technology,2013.(in Chinese)
19 李玉航, 梅江平, 劉松濤,等. 一種新型4自由度高速并聯(lián)機(jī)械手動(dòng)力尺度綜合[J]. 機(jī)械工程學(xué)報(bào), 2014,50(19):32-40. LI Yuhang, MEI Jiangping, LIU Songtao,et al.Dynamic dimensional synthesis of a 4-DOF high-speed parallel manipulator[J].Journal of Mechanical Engineering 2014,50(19):32-40.(in Chinese)
20 朱小蓉,宋月月,孫晨,等.2RRUR-2RSS并聯(lián)機(jī)構(gòu)結(jié)構(gòu)特性與運(yùn)動(dòng)學(xué)分析[J/OL].農(nóng)業(yè)機(jī)械學(xué)報(bào),2016,47(12):408-415. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161252&flag=1.DOI:10.6041/j.issn.1000-1298.2016.12.052. ZHU Xiaorong,SONG Yueyue,SUN Chen, et al.Structural characteristics and kinematic analysis for novel 2RRUR-2RSS parallel mechanism[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):408-415.(in Chinese)
Design and Kinematics Analysis of a Novel 3T1R Parallel Manipulator with Lower Coupling Degree
SHEN Huiping YIN Honghe SHAO Guowei YANG Tingli
(ResearchCenterforAdvancedMechanismTheory,ChangzhouUniversity,Changzhou213016,China)
Comparing with the 3-DOF Delta mechanism, the 4-DOF parallel mechanisms which can achieve SCARA motion (i.e., three translations and one rotation) have their own complex topological structures with coupling degreek=2, which results in the higher complexity level of solutions for forward kinematics and dynamics. According to the design theory for parallel mechanisms (PMs) based on position and orientation characteristic (POC) equation and the principle for the coupling degree reducing, a novel 4-DOF SCARA type parallel manipulator with lower coupling degree ofk=1 was proposed. Firstly, the structure of the 4-DOF SCARA PM was introduced and the coupling degree of the mechanisms was calculated as beingk=1. Secondly, the direct position and the inverse kinematics problem of the mechanism was solved by using the modeling methods based on the ordered SOC unit, and the positive and inverse solutions were verified by numerical methods using Matlab. Furthermore, the workspace of the mechanism was analyzed based on inverse solutions formula. Meanwhile, rotation ability of the PM was analyzed. Finally, the singularity analysis of the mechanism was also performed based on Jacobian matrix, from which three kinds of singular conditions were obtained. The results showed that the manipulator had a simpler mechanical structure and larger workspace and rotation ability than H4 or Cross-Ⅳ under the same set of structural parameters. The research provided a theoretical base for its kinematics and dynamics and optimal design of this manipulator.
parallel mechanism; position and orientation characteristic set; kinematics; 3T1R; lower coupling degree; workspace
2016-09-16
2016-10-31
國家自然科學(xué)基金項(xiàng)目(51475050、51375062)和江蘇省重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(BE2015043)
沈惠平(1965—),男,教授,博士生導(dǎo)師,主要從事機(jī)構(gòu)學(xué)和并聯(lián)機(jī)構(gòu)研究,E-mail: shp65@126.com
10.6041/j.issn.1000-1298.2017.05.052
TH112
A
1000-1298(2017)05-0405-08
