高速電驅動履帶車輛聯合制動轉矩動態協調控制研究
2017-06-08 01:33:51生輝蓋江濤李春明杜明剛帥志斌
兵工學報 2017年5期
生輝, 蓋江濤, 李春明, 杜明剛, 帥志斌
(中國北方車輛研究所 車輛傳動重點實驗室, 北京 100072)
?
高速電驅動履帶車輛聯合制動轉矩動態協調控制研究
生輝, 蓋江濤, 李春明, 杜明剛, 帥志斌
(中國北方車輛研究所 車輛傳動重點實驗室, 北京 100072)
針對高速電驅動履帶車輛機械制動器、電機和電液緩速器3種執行部件聯合制動轉矩響應的問題,提出了機械制動器、電機和電液緩速器動態協調控制策略。基于制動需求和車速等因素進行穩態制動力分配,綜合考慮3種執行部件動態響應特性,建立基于電機- 電液緩速器二者聯合制動和機械- 電機- 電液緩速器三者聯合制動轉矩動態協調控制策略,搭建面向工程應用的電驅動履帶車輛傳動系統仿真模型,利用實時仿真工具進行策略驗證。仿真結果表明,在整個制動過程中該動態協調控制策略可提高車輛總制動轉矩響應速度和精度,改善系統動態響應特性。
兵器科學與技術; 高速; 電驅動履帶車輛; 聯合制動; 動態協調控制; 實時仿真
0 引言
與液力機械綜合傳動的履帶車輛相比,采用電驅動的履帶車輛可以實現無級變速,該方法效率高,易于布置,適合采用現代控制技術,利用電機制動時還可以回收能量,提高能源利用率。但是隨著履帶車輛的高速化發展,制動負荷也越來越大,利用單一執行部件或機電聯合制動往往不能較好地滿足高速緊急制動的苛刻要求,利用多種執行部件聯合制動成為重型高速履帶車輛制動技術發展趨勢。
研究采用機械制動器、電機和電液緩速器3種執行部件聯合制動,與以往的研究[1-6]相比,執行部件更多,制動模式更復雜。以往的研究只考慮了穩態制動力分配,未加入動態協調控制,如果僅僅設計穩態制動轉矩分配策略,而不進行動態協調控制,會大大降低履帶車輛的穩定性和舒適性。國內針對聯合制動系統動態協調控制的研究[7-9]相對較少,主要有以下3種:1)通過對機械制動系統和電機系統進行校正,使兩者響應速度相同[10],該策略會導致整個系統響應滯后;2)利用濾波算法,低頻部分由機械制動系統提供,高頻部分由電機提供[11],該策略在某些模式切換時的控制效果不理想;3)利用前饋- 反饋調節電機制動轉矩以快速響應制動需求[12],但該策略在電機制動力飽和時效果并不理想。
針對高速電驅動履帶車輛,分析了機械制動器、電機和電液緩速器3種制動系統制動轉矩的動態協調控制策略。首先通過對制動系統結構和特性的分析,建立機械制動系統、電機和電液緩速器的動態響應特性傳遞函數,以及系統動力學模型;其次建立未加入機械制動以前,以電液緩速器制動轉矩作為擾動,電機制動轉矩動態協調的控制策略,加入機械制動之后,以電機和電液緩速器制動轉矩為擾動,機械制動轉矩動態協調的協調控制策略;最后搭建“駕駛員- 控制器”[13]在環的雙電機驅動履帶車輛實時仿真系統,進行了控制算法的仿真驗證。結果表明:該策略下的制動轉矩響應精度更高,系統動態響應特性更好。
1 制動系統分析與建模
1.1 制動系統結構
高速電驅動履帶車輛制動系統結構框圖如圖1所示。電機制動轉矩施加在減速器之前,電液緩速器和機械制動轉矩施加在變速器輸出軸上。
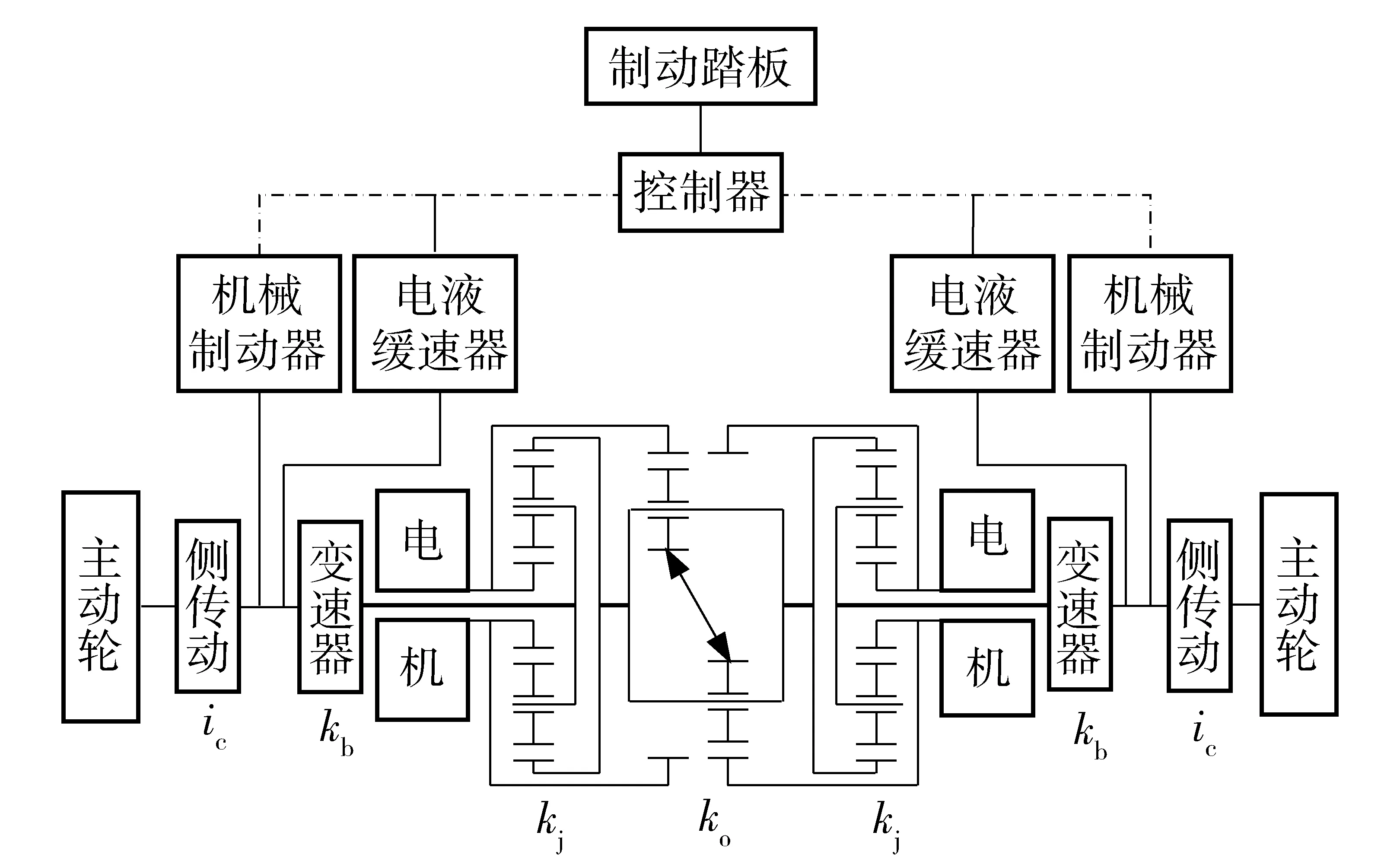
圖1 制動系統結構框圖Fig.1 Block diagram of brake system structure
1.2 系統動力學建模
電驅動履帶車輛直線行駛制動過程動力學模型為
2Fmeic+2Felkjkokbic+2Freic,
(1)
式中:f為地面阻力系數;m為整車質量;δ為質量增加系數;g為重力加速度;α為爬坡角度;CD為空氣阻力系數;A為迎風面積;v為車輛速度;Fme為折算到主動輪處的機械制動力;Fel為折算到主動輪處的電機制動力;Fre為折算到主動輪處的電液緩速器制動力;ic為側傳動比;kj為減速比;ko為耦合機構傳動比,ko=1;kb為變速比。
1.3 電機系統模型

圖2 電機轉矩及效率圖Fig.2 Motor torque and efficiency
本文是對電機系統整體進行模型設計,因此不需要考慮電機內部的物理過程,只需要測得電機的外特性以及效率特性數據(見圖2),再加上1階滯后環節來表示電機的輸入、輸出特性,以此描述出電機系統的模型。
電動時,

(2)
式中:Tel為電機輸出轉矩;Tel_req為電機需求轉矩;Tel_max 和Tel_min 分別為電機允許的最大轉矩和最小轉矩;k1為電機系統常數;τ1為時間常數;s為拉普拉斯算子。
制動時,
(3)
式中:k2為電機系統常數;τ2為時間常數。
電機系統工作區間為0~1 100 N·m,選取電機額定轉矩1 100 N·m進行動態響應試驗,試驗曲線如圖3所示。
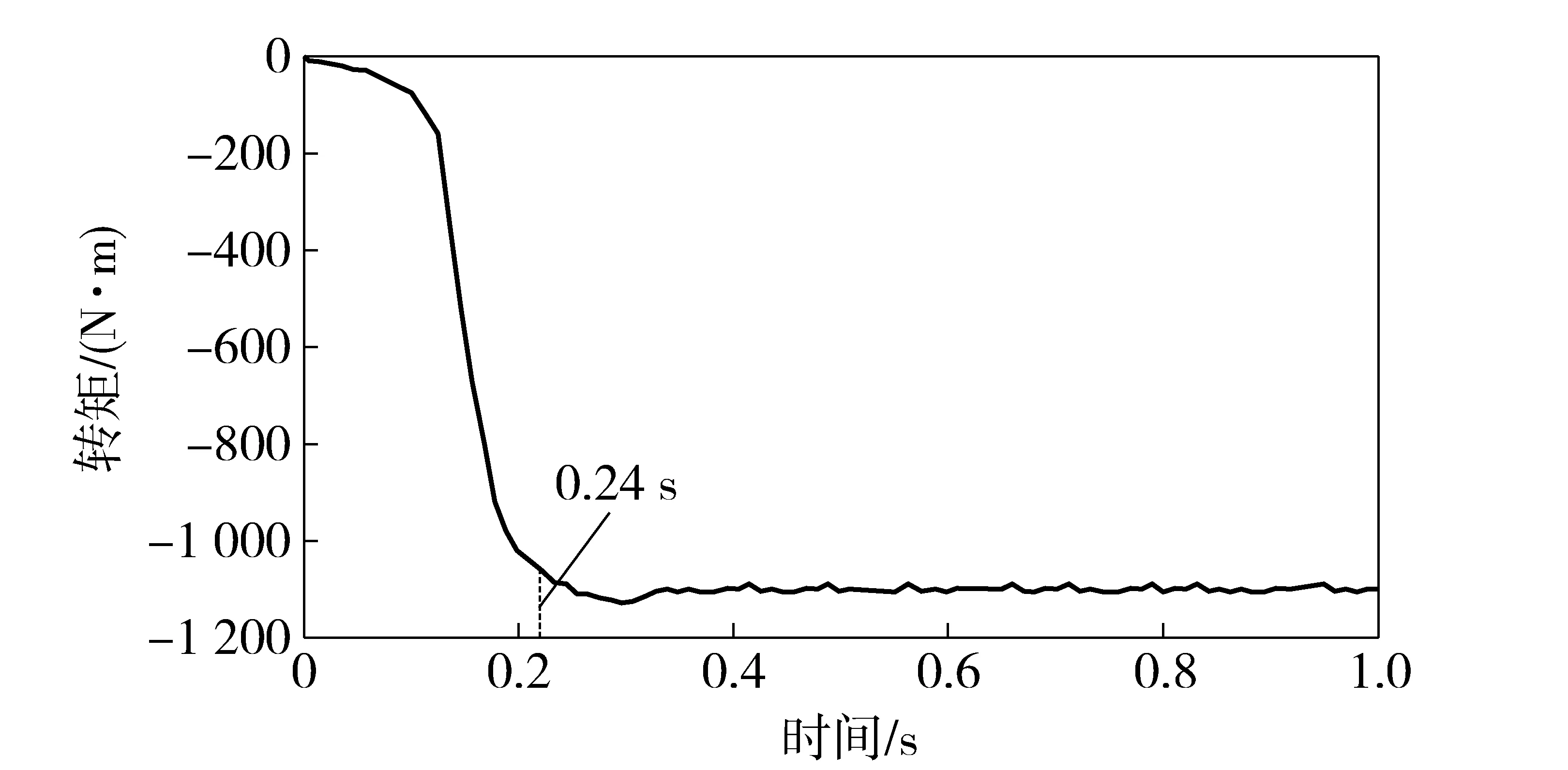
圖3 電機額定轉矩動態響應特性Fig.3 Dynamic response characteristics of motor
1.4 電液緩速器模型
建立電液緩速系統整體模型,只需要考慮電液緩速器輸出制動轉矩特性,再加上1階滯后環節修正,則制動轉矩為

(4)
式中:Tre為電液緩速器輸出制動轉矩;Tre_max為電液緩速器允許的最大制動轉矩;k3為電液緩速器系統常數;τ3為時間常數。
電液緩速器的工作區間為0~2 200 N·m,選取電液緩速器2 200 N·m進行動態響應試驗,試驗曲線如圖4所示。
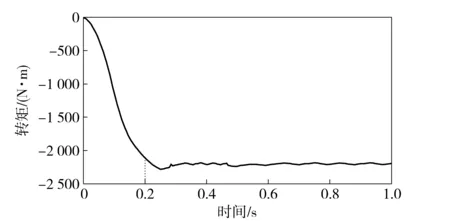
圖4 電液緩速器動態響應特性Fig.4 Dynamic response characteristics of electro hydraulic retarder
1.5 機械制動系統模型
機械制動系統包括液壓系統模型和制動器模型。液壓系統壓力由控制器分配的機械制動轉矩決定,制動器制動轉矩與制動壓力和制動器的結構參數有關系。
T′me=Mpb,
(5)
式中:T′me為制動器制動轉矩;pb為制動壓力;M為制動器制動效能因數,M=m1+m2v+m3v2,其中m1、m2、m3由試驗數據擬合得到。
考慮系統存在機械和液壓延遲,用1階滯后環節來修正制動轉矩,則考慮延遲的制動器制動轉矩為

(6)
式中:k4為電機系統常數;τ4為時間常數。
選取液壓系統壓力12 MPa進行動態響應特性進行試驗,試驗曲線如圖5所示。

圖5 液壓系統動態響應特性Fig.5 Dynamic response characteristics of hydraulic system
2 制動力協調分配控制策略
制動力協調分配控制策略包括:穩態制動轉矩分配和動態協調控制策略。穩態制動轉矩分配主要解決總需求制動轉矩在電機、緩速器和機械制動之間的分配問題。動態協調控制策略主要是解決多部件聯合制動時,各部件啟動時響應不同步引起的波動問題。
2.1 穩態制動轉矩分配
根據相關國家履帶車輛電傳動聯合制動指標,車輛的最大減速度要大于5 m/s2,所以選取-5.5 m/s2為車輛的最大減速度,經過換算即為最大總體制動轉矩需求。駕駛員的制動意圖通過制動踏板行程來實現,制動踏板的工作范圍為[5%,95%]。當制動踏板被踏下走過空行程5%時,才認為接下來的行程是駕駛員有意識的操作;當制動踏板角位移超過95%時,認為踏板被踩死,即達到最大總體制動轉矩需求。所以總體需求制動轉矩可表示為
(7)
式中:Treq為總體制動轉矩需求;β為制動踏板開度;r為主動輪半徑。
根據機械制動器、電機和電液緩速器3種執行部件的制動特性,制定穩態制動力分配策略:1)車速低于或等于10 km/h時,制動轉矩完全由機械制動器提供,則需求機械制動轉矩等于總體制動轉矩需求,其他兩者需求轉矩均為0 N·m;2)當車速超過10 km/h時,模糊控制器根據車速,踏板角度,電池荷電狀態(SOC)分配電機需要提供的制動轉矩,一般電機提供的最大制動轉矩無法滿足總需求制動轉矩時,不足部分由電液緩速器提供,此時電機和電液緩速器形成二者聯合制動,因此需要開展二者協調控制策略研究;3)若仍無法滿足總體需求制動轉矩,不足部分由機械制動器提供,此時形成機械制動、電機和電液緩速器三者聯合制動,因此需要開展三者協調控制策略研究。
2.2 動態協調控制策略制定
制動模式切換時,由于電機、電液緩速器和機械制動系統的動態響應時間各不相同,實際輸出總制動轉矩會產生波動,降低車輛的舒適性和穩定性。為了消除制動過程中因制動模式切換引起的波動,建立基于3種完全獨立的制動系統制動轉矩動態協調控制策略,總體框圖如圖6所示。

圖6 動態協調控制總體框圖Fig.6 General block diagram of dynamic coordinated control
綜合考慮兩個階段系統設計的需要,本文所設計的動態協調控制算法分為未加入機械制動和加入機械制動的協調控制策略。該控制算法是前饋- 反饋動態協調控制。該算法基于現代控制理論中擾動的抑制和消除的思想,反饋控制器是為了減小擾動量,從而保證系統的穩定性與魯棒性,前饋控制器能夠保證系統的響應特性與匹配特性。
2.2.1 電機- 電液緩速器聯合制動動態協調控制策略
制動過程中,未加入機械制動,只有電機和電液緩速器時,采用電機制動轉矩動態協調電液緩速器。控制策略如圖7所示。
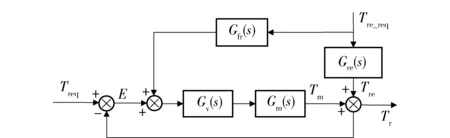
圖7 電機和電液緩速器聯合制動轉矩協調控制Fig.7 Composite braking torque coordination control of motor-retarder
電驅動履帶車輛制動系統折算到主動輪處總需求制動轉矩Treq作為控制系統的目標輸入;主動輪的實際輸出制動轉矩Tr作為控制系統的輸出;控制策略所分配的電液緩速器制動轉矩Tre_req作為擾動量;將電機制動轉矩設為被控量;目標是使主動輪實際制動轉矩與目標制動轉矩的偏差為0 N·m. 圖7中Tm為折算到主動輪處實際電機制動轉矩;E為需求制動轉矩與實際制動轉矩的偏差,為控制誤差量;Tre為折算到主動輪處實際電液緩速器制動轉矩;E為需求制動轉矩與實際制動轉矩的偏差,為控制誤差量;Gfr(s)為電液緩速器前饋補償器的傳遞函數;Gm(s)為電機系統的傳遞函數;Gv(s)為反饋通道傳遞函數;Gre(s)為電液緩速器系統傳遞函數。
2.2.2 機械- 電機- 電液緩速器三者聯合制動動態協調控制策略
當電機和電液緩速器無法滿足制動需求時,加入機械制動轉矩,此時由機械制動轉矩來動態協調由于電機和電液緩速器動態響應滯后造成的制動轉矩波動,電機采用模糊PID控制器主動協調,從而改善制動性能。總體控制策略如圖8所示。

圖8 機械- 電機- 電液緩速器聯合制動轉矩協調控制Fig.8 Composite braking torque coordinated control of mechanics-motor-retarder
Treq作為控制系統的目標輸入;主動輪的實際輸出制動轉矩Tr作為控制系統的輸出;控制策略預分配的折算到主動輪處電機制動轉矩Tm_req和電液緩速器制動轉矩Tre_req作為擾動量;將機械制動轉矩設為被控量;目標是使主動輪實際制動轉矩與目標制動轉矩的偏差為0 N·m. 圖8中Gfm(s)為電機前饋補償器的傳遞函數;Gre(s)電液緩速器系統的傳遞函數;Gp(s)為機械制動系統的傳遞函數;T′m為模糊PID控制器主動協調的控制輸出量。
2.3 各模塊傳遞函數及模糊PID控制算法設計
2.3.1 3種制動系統傳遞函數
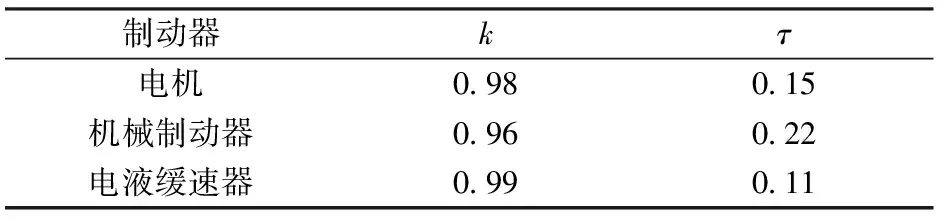
表1 各制動器特性參數Tab.1 Characteristic parameters of brake
2.3.2 前饋通道傳遞函數
假設控制系統輸入3種制動系統總制動力需求為0 N,則
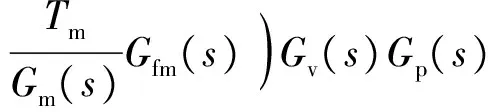
(8)
E=Tr_req-Tr,
(9)
Tr=Tp+Tm+Tre.
(10)
由(8)式、(9)式和(10)式求得
(11)
制動力動態協調控制系統的控制目標是E=0,因此需要滿足
E=-Tr=0,
(12)
從而可以求得前饋控制的傳遞函數為

(13)
(14)
2.3.3 反饋通道傳遞函數Gv(s)
對于制動協調控制系統,由于模型具有誤差,外部具有擾動,為了消除這些因素對控制效果的影響,采用反饋控制器來實現這一目標。本文采用傳統的PID控制,則反饋通道傳遞函數為

(15)
式中:kp為比例常數;ki為積分常數;kd為微分常數。
2.3.4 模糊PID控制設計
采用模糊PID控制算法對電機進行主動協調控制,模糊控制器的規則庫根據不同的e及de/dt對PID控制器的參數kp、ki、kd進行在線自整定的模糊控制[14]。該算法根據對電機輸出的特性要求和電機的反饋對電機進行協調控制,如圖9所示。
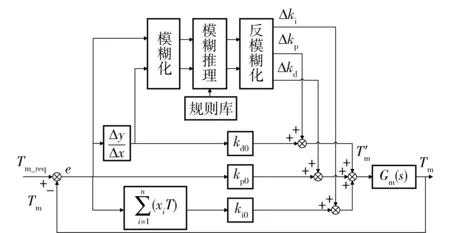
圖9 模糊PID電機主動協調控制Fig.9 Fuzzy PID motor active coordination control
模糊PID控制器的控制輸出量為

(16)
e(k)=Tm_req-Tm,
(17)
Δe(k)=e(k)-e(k-1),
(18)

模糊PID控制器的控制參數kp、ki、kd如下:
kp=kp0+Δkp,
(19)
ki=ki0+Δki,
(20)
kd=kd0+Δkd,
(21)
式中:kp0、ki0和kd0為模糊PID控制器控制參數的初始值;Δkp、Δki和Δkd為修正系數。
模糊PID控制器的輸入為e和de/dt,輸出為修正系數Δkp、Δki和Δkd,均劃分為7擋,標準區間為[-3,3],變換為標準區間y的公式如下:
(22)
式中:x為偏差e(k)、偏差的差分值Δe(k)變換前的區間;a、b分別為變換前的邊界點。
3 控制算法實時仿真驗證
為了準確分析高速電驅動履帶車輛機械- 電機- 電液緩速器聯合制動,驗證機械- 電機- 電液緩速器聯合制動動態協調控制策略,利用實時仿真工具RT-LAB搭建“駕駛員—控制器”在環的高速電驅動履帶車輛實時仿真系統,進行實時仿真驗證,如圖10所示。
操縱系統(加速踏板和制動踏板)、控制器為實物,建立電機及其變頻器、耦合機構,機械制動器和電液緩速器等機械系統以及履帶車輛等動態模型,運行在RT-LAB系統中進行實時仿真;控制算法通過代碼自動生成,下載到實時仿真分系統OP5600中占用一個核。通過操縱系統將駕駛員操作指令轉換為輸入信號輸入綜合控制器,綜合控制器運行控制算法求得兩個機械制動器、電機和電液緩速器的目標轉矩指令,發送給OP5600另一個核中運行的動態模型,進行控制算法的實時仿真驗證。
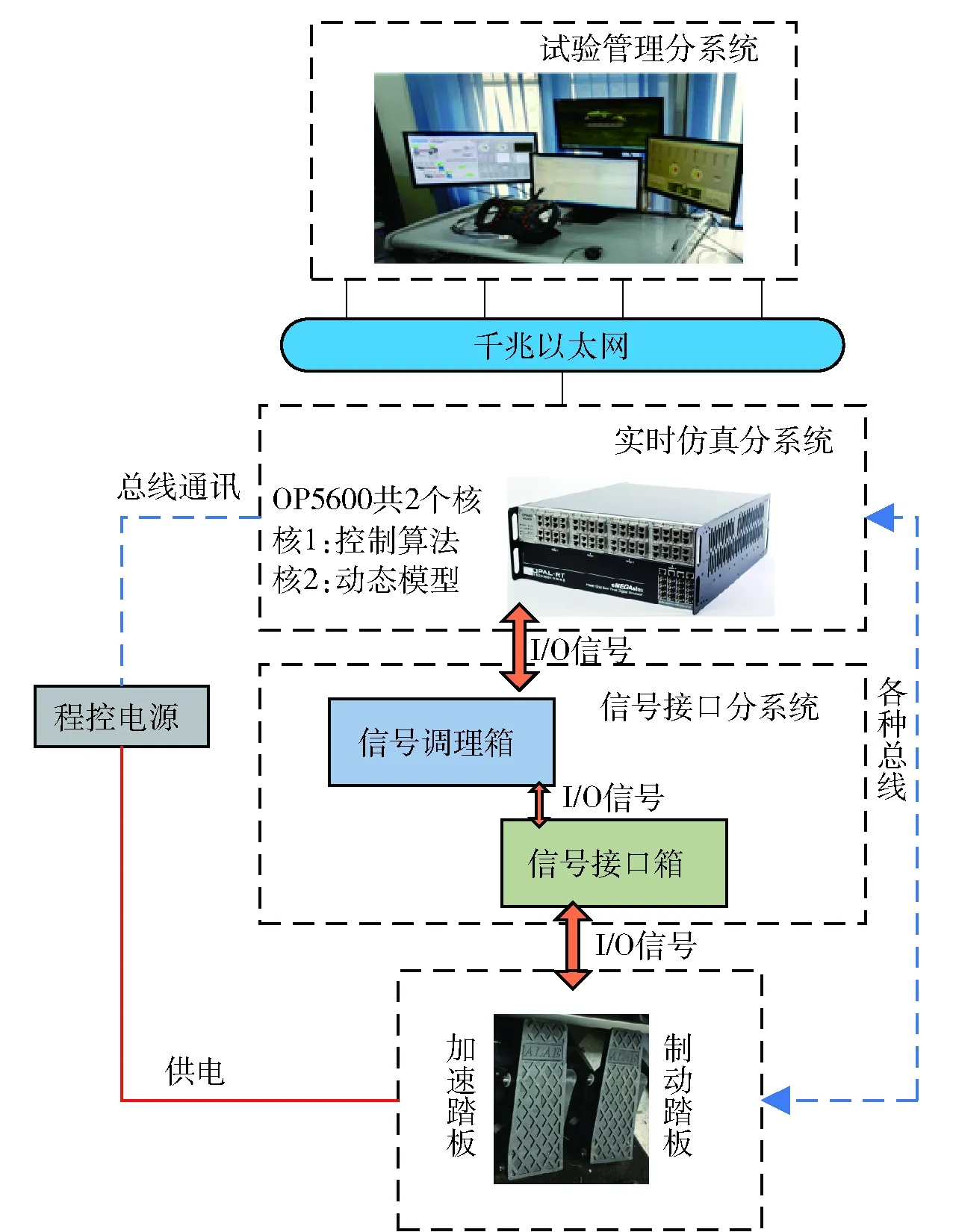
圖10 聯合制動實時仿真系統Fig.10 Composite braking real-time simulation system
加速踏板信號如圖11藍色線所示,將車輛加速到83.6 km/h開始制動,制動踏板信號如圖11紅色線所示,制動方式為漸進制動,此時需求制動轉矩如圖12所示,車速變化曲線如圖13所示。

圖11 加速踏板和制動踏板信號Fig.11 Signals of accelerator pedal and brake pedal
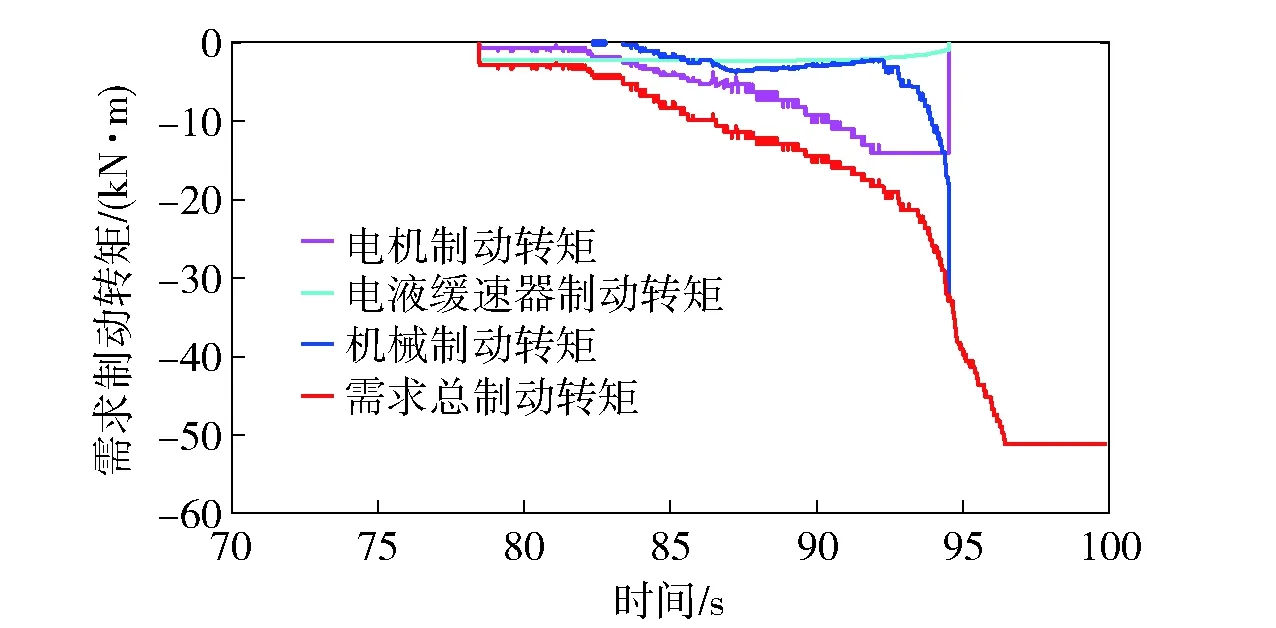
圖12 需求制動轉矩Fig.12 Required braking torque
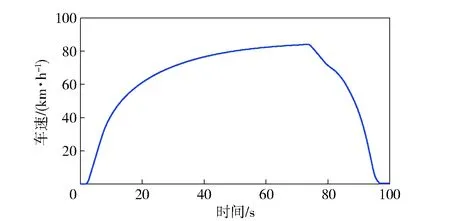
圖13 車速曲線Fig.13 Speed curve
由圖12和圖13可以看出,當車速高于10 km/h時,控制器根據踏板行程分配機械制動、電機和電液緩速器制動轉矩;當車速低于10 km/h時,制動轉矩完全由機械制動提供。總的需求制動轉矩隨著制動需求的增加整體呈比例增加,基本符合制動需求。
當制動剛開始時,如圖14所示,即78.3 s時,制動轉矩由電液緩速器和電機提供,此時電機制動轉矩動態協調電液緩速器。由圖14可知,制動轉矩響應時間不到1 s,總制動轉矩上下波動基本穩定在±3%內,制動轉矩響應快而且精度高,驗證了電機制動轉矩動態協調控制策略有效。
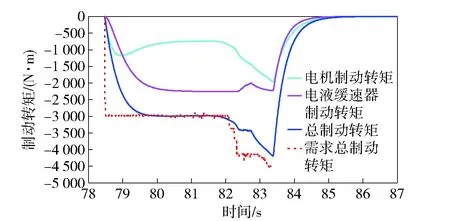
圖14 電機- 電液緩速器聯合制動轉矩協調控制Fig.14 Composite braking torque coordination control of motor-retarder
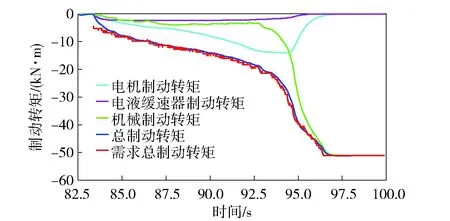
圖15 機械- 電機- 電液緩速器聯合制動轉矩協調控制Fig.15 Composite braking torque coordination control of mechanics-motor-retarder
當制動需求繼續增加時,如圖15所示,制動轉矩由3種制動轉矩提供,采用機械- 電機- 電液緩速器聯合制動動態協調控制策略。由圖15可知,83.5 s時制動轉矩由電機、電液緩速器和機械制動系統提供,形成聯合制動,此時機械制動轉矩動態協調電機和電液緩速器。由圖15可知,總制動轉矩上下波動基本穩定在±5%內,經過協調的總制動轉矩很好地跟蹤了需求制動轉矩,驗證了機械制動轉矩動態協調控制策略有效。
圖16為實際總制動轉矩和需求總制動轉矩,由圖16可知當需求總制動轉矩變化時,實際總制動轉矩很好地跟蹤了需求總制動轉矩,滿足駕駛員的制動需求。而且整個制動過程中,實際總制動轉矩在模式切換時,由電機- 電液緩速器聯合制動轉換為機械- 電機- 電液緩速器聯合制動時,即83.5 s,由機械- 電機- 電液緩速器聯合制動轉換為純機械制動,即96.1 s,實際總制動轉矩并未產生大的波動,基本穩定在±5%內,驗證了該動態協調控制策略有效。
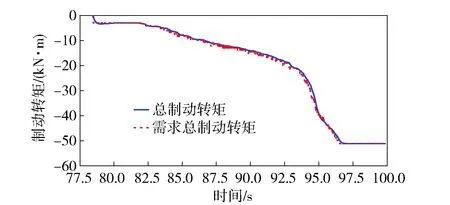
圖16 總制動轉矩Fig.16 Total braking torque
4 結論
1)提出了多部件聯合制動動態協調控制策略,該策略從實際需求出發,針對不同制動模式制定相應協調控制策略,避免了電機、機械制動轉矩出現飽和;可以對電機制動轉矩進行主動協調;減小了擾動量;保證了系統的響應和匹配特性。
2)仿真結果表明該策略有效解決了3種執行部件動態響應不同步問題,使得實際總制動轉矩很好的跟蹤了需求總制動轉矩,而且波動小,響應快。
3)目前控制算法的驗證基于實時硬件在環試驗,因此,后續需要結合臺架和實車試驗完善控制策略。
References)
[1] 趙廣俊,呂建剛, 宋彬, 等. 液壓混合動力履帶車輛聯合制動模糊控制[J].控制理論與應用,2010,27(12):1674-1680. ZHAO Guang-jun, LYU Jian-gang, SONG Bin, et al. Fuzzy control of combined braking system in hydraulic hybrid tracked vehicle[J]. Control Theory & Applications, 2010,27(12):1674-1680. (in Chinese)
[2] 李峰,谷中麗,劉曉星.混合動力履帶車輛機電聯合制動模糊控制策略研究[J].汽車工程,2012,2(3):221-227. LI Feng,GU Zhong-li,LIU Xiao-xing. Study on electric-mechanical composite braking strategy based on fuzzy rules for hybrid tracked vehicle[J]. Chinese Journal of Automotive Engineering, 2012, 2(3):221-227. (in Chinese)
[3] 曾慶含,魏曙光,魏巍,等. 混合動力履帶車輛機電復合制動力分配策略研究[J].火炮發射與控制學報,2016,37(2):46-51,56. ZENG Qing-han,WEI Shu-guang,WEI Wei, et al. Study on electric-mechanical combined braking distribution strategy of hybrid electrical vehicle[J]. Journal of Gun Launch & Control,2016, 37(2):46-51,56. (in Chinese)
[4] 徐鳴.重車聯合制動電液比例控制系統仿真與實驗研究[J].兵工學報,2008,29(1):6-9. XU Ming. Simulation and experiment research on electro hydraulic proportional control for heavy vehicle blend brake system[J]. Acta Armamentarii,2008,29(1):6-9. (in Chinese)
[5] 何仁,王永濤,趙迎生. 汽車聯合制動系統的性能仿真分析[J]. 兵工學報,2007,28(10):1153-1158. HE Ren, WANG Yong-tao, ZHAO Ying-sheng. Performance simulation analysis of the united brake system of automobiles[J]. Acta Armamentarii, 2007,28(10):1153-1158. (in Chinese)
[6] 宋世欣,王慶年,王達.電動輪汽車再生制動系統控制策略[J].吉林大學學報:工學版,2015,45 (1):341-346. SONG Shi-xin, WANG Qing-nian, WANG Da. Control strategy for regenerative braking system of in-wheel motor vehicle[J].Journal of Jilin University : Engineering and Technology Edition, 2015,45(1): 341-346.(in Chinese)
[7] 付曉丹,羅禹貢,韓云武,等. 智能混合動力汽車電液復合制動的協調控制策略[J]. 汽車工程,2011,33(11):915-919. FU Xiao-dan,LUO Yu-gong,HAN Yun-wu,et al. Coordinated control strategy for the electro- hydraulic braking system of intelligent hybrid electric vehicles[J]. Automotive Engineering,2011,33(11):915-919.(in Chinese)
[8] 張體環. 混合動力客車制動力協調控制算法研究[D]. 長春:吉林大學,2011. ZHANG Ti-huan. Study on the coordinated control algorithm of braking force for HEV bus[J]. Changchun: Jilin University,2011.(in Chinese)
[9] 王奎洋,何仁. 汽車機電復合制動系統協調控制技術現狀分析[J].重慶理工大學學報:自然科學版,2014,28(12):10-17. WANG Kui-yang, HE Ren. Analysis on coordination control technology of electro-mechanical composite braking system of vehicle[J]. Journal of Chongqing University of Technology:Natural Science, 2014,28(12):10-17. (in Chinese)
[10] Numasato H,Tomizuka M.Settling control and performance of a dual-actuator system for hard disk drives[J].IEEE/ASME Tran-sactions on Mechatronics,2008,8(4):431-438.
[11] Teruo O. Braking performance improvement for hybrid electric vehicle based on electric motor’s quick torque response [C]∥Proceedings of the 19th International Electric Vehicle Symposium and Exhibition.Busan,Korea:WEVA/EVAAP/KSAE,2002:1285-1296.
[12] Shang M,Chu L,Guo J,et al.Hydraulic braking force compensation control for hybrid electric vehicles[C]∥2010 International Conference on Computer,Mechatronics,Control and Electronic Engineering. Changchun,China:Intelligent Imformation Techno-logy Application Research Association,2010: 335-339.
[13] 鄒淵,孫逢春,張承寧.電傳動履帶車輛“駕駛員- 綜合控制器”在環的雙側驅動控制實時仿真[J].機械工程學報,2007,43(3):193-198. ZOU Yuan, SUN Feng-chun, ZHANG Cheng-ning. Electric tracked vehicle real-time simulation of dual-motor driving control with driver-global controller in-loop[J]. Journal of Mechanical Engineering, 2007,43(3):193-198. (in Chinese)
[14] 鄔占.并聯式混合動力轎車驅動防滑控制算法研究[D].長春:吉林大學,2012. WU Zhan. Study on acceleration slip regulation control algorithm for parallel hybrid electric vehicle[D]. Changchun: Jilin University,2012. (in Chinese)
Coordinated Control of High Speed Electric Drive Tracked Vehicle
SHENG Hui, GAI Jiang-tao, LI Chun-ming, DU Ming-gang, SHUAI Zhi-bin
(Science and Technology on Vehicle Transmission Laboratory, China North Vehicle Research Institute, Beijing 100072,China)
A dynamic coordinated control strategy of mechanical brake, motor and electro-hydraulic retarder is proposed for the torque response of composite braking of mechanical brake, motor and electro-hydraulic retarder in high speed electric drive tracked vehicle. The steady-state braking torque is assigned based on braking requirement and vehicle speed, and the dynamic response characteristics of three executive components are considered comprehensively. Based on the dynamic coordinated control strategy for the composite braking of motor and electro-hydraulic retarder and the composite braking of mechanical brake, motor and electro hydraulic retarder, a simulation model of electric drive tracked vehicle transmission system is established, making use of real-time simulation tool to verify the strategy. The simulated results show that the dynamic coordinated control strategy can be used to enhance the response speed of total braking torque, and improve the dynamic response characteristics of the vehicle during braking.
ordnance science and technology; high speed; electric drive tracked vehicle; composite braking; dynamic coordinated control; real-time simulation
2016-09-05
國家自然科學基金項目(51505436)
生輝(1989—),女,碩士研究生。E-mail:shenghui0419@163.com
蓋江濤(1981—),男,研究員,博士。E-mail:13811181602@163.com
TJ810.3+23
A
1000-1093(2017)05-1027-08
10.3969/j.issn.1000-1093.2017.05.024
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
當代工人(2020年8期)2020-05-25 09:07:38
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
科技知識動漫(2016年8期)2016-07-29 20:40:09
