一種基于移動(dòng)像機(jī)的大型結(jié)構(gòu)件形變監(jiān)測方法
2017-06-08 05:50:43劉煉雄胡昌華何川周志杰趙玉山
中國測試 2017年5期
關(guān)鍵詞:測量
劉煉雄,胡昌華,何川,周志杰,趙玉山
(火箭軍工程大學(xué)控制工程系,陜西 西安 710025)
一種基于移動(dòng)像機(jī)的大型結(jié)構(gòu)件形變監(jiān)測方法
劉煉雄,胡昌華,何川,周志杰,趙玉山
(火箭軍工程大學(xué)控制工程系,陜西 西安 710025)
針對(duì)大型結(jié)構(gòu)安全監(jiān)測中測量設(shè)備多、分布復(fù)雜、價(jià)格昂貴等問題,提出一種基于攝像測量技術(shù)的移動(dòng)式工業(yè)像機(jī)在線監(jiān)測方法。通過不同視圖之間的極線約束關(guān)系推導(dǎo)運(yùn)動(dòng)平臺(tái)以及像機(jī)在不同時(shí)刻外參數(shù)的約束關(guān)系。利用簡單數(shù)據(jù)融合方法將像機(jī)運(yùn)動(dòng)外參數(shù)與運(yùn)動(dòng)軌跡解算的像機(jī)外參數(shù)進(jìn)行融合,達(dá)到自動(dòng)在線測量像機(jī)外參數(shù)的目的,從而解出標(biāo)識(shí)點(diǎn)的精確位置,實(shí)現(xiàn)測量過程的自動(dòng)化。實(shí)驗(yàn)結(jié)果表明:提出的測量方法裝置簡單,精度較高,可以應(yīng)用于大型復(fù)雜結(jié)構(gòu)的在線形變安全監(jiān)測。
全局測量;在線監(jiān)測;極線約束關(guān)系;外參數(shù)
0 引言
攝像測量技術(shù)因其高精度、非接觸、實(shí)時(shí)性等特點(diǎn)被廣泛應(yīng)用于國防武器試驗(yàn)、交通運(yùn)輸、航空航天、建筑施工等國防建設(shè)以及國民經(jīng)濟(jì)各個(gè)領(lǐng)域[1]。其在大型設(shè)備安全監(jiān)測領(lǐng)域中,根據(jù)工業(yè)像機(jī)所處的不同狀態(tài)具體可分為靜態(tài)監(jiān)測與動(dòng)態(tài)監(jiān)測兩種技術(shù)。靜態(tài)監(jiān)測即利用位置固定的像機(jī)對(duì)設(shè)備進(jìn)行的實(shí)時(shí)測量[2-4];動(dòng)態(tài)監(jiān)測即像機(jī)依托高精度運(yùn)動(dòng)平臺(tái),在不同位置對(duì)物體表面進(jìn)行圖像采集,并根據(jù)像機(jī)所處位置及所采集像點(diǎn)位置關(guān)系進(jìn)行的全局標(biāo)識(shí)點(diǎn)測量。
在工程應(yīng)用中,考慮到不同大型結(jié)構(gòu)件發(fā)生形變等安全隱患的實(shí)際情況不同,采用靜態(tài)監(jiān)測方法對(duì)形變發(fā)生緩慢、尺寸大的結(jié)構(gòu)件進(jìn)行監(jiān)測時(shí),將會(huì)存在像機(jī)使用數(shù)目較多、系統(tǒng)搭建復(fù)雜、經(jīng)濟(jì)性較差等不足。文獻(xiàn)[4]中利用組網(wǎng)測量技術(shù)進(jìn)行監(jiān)測過程中使用的像機(jī)數(shù)最多可達(dá)40個(gè),雖能較好地對(duì)結(jié)構(gòu)件實(shí)施高可靠性的安全監(jiān)測,但同時(shí)也會(huì)大幅提高監(jiān)測系統(tǒng)的復(fù)雜度和經(jīng)濟(jì)代價(jià)。而基于移動(dòng)像機(jī)的動(dòng)態(tài)監(jiān)測方法,雖然在測量過程中像機(jī)外參數(shù)會(huì)實(shí)時(shí)變化、不易求解[5],且存在數(shù)據(jù)拼接較難、測量結(jié)果精度較低等問題[6],但在考慮經(jīng)濟(jì)性和監(jiān)測效率的情況下,動(dòng)態(tài)監(jiān)測方法能較好地克服采用靜態(tài)監(jiān)測方法存在的不足,因而在保證監(jiān)測方法經(jīng)濟(jì)高效的前提下,提高動(dòng)態(tài)監(jiān)測方法的測量精度在工程應(yīng)用中將存在較大的研究價(jià)值。
針對(duì)上述提出的問題,本文通過像機(jī)移動(dòng)過程中不同視圖之間的極線約束關(guān)系建立了對(duì)像機(jī)外參數(shù)進(jìn)行實(shí)時(shí)求解的模型,并在考慮像機(jī)平臺(tái)移動(dòng)速率和像機(jī)采樣幀頻對(duì)測量精度的影響后,提出了一種基于移動(dòng)像機(jī)、可應(yīng)用于大型結(jié)構(gòu)件的在線形變監(jiān)測方法。
1 問題描述
首先,建立世界坐標(biāo)系W-XYZ、運(yùn)動(dòng)平臺(tái)坐標(biāo)系B-XBYBZB、像機(jī)坐標(biāo)系C-XCYCZC,圖像坐標(biāo)系oxy,其中像機(jī)與運(yùn)動(dòng)平臺(tái)之間為剛性連接。如圖1所示,在測量目標(biāo)表面布置適當(dāng)標(biāo)識(shí)點(diǎn),并在標(biāo)識(shí)點(diǎn)上進(jìn)行二維編碼[7-9],方便同名點(diǎn)精確匹配。單目像機(jī)在運(yùn)動(dòng)平臺(tái)上圍繞測量目標(biāo)表面做可控運(yùn)動(dòng)。假設(shè)像機(jī)圖像采樣間隔周期內(nèi),目標(biāo)形狀未發(fā)生任何變化,其中在ti與ti+1時(shí)刻像機(jī)所處位置變化如圖1所示(其中右圖為測量原理俯視圖),像機(jī)所采集公共目標(biāo)點(diǎn)的世界坐標(biāo)設(shè)為Pw(xw,yw,zw),其在相應(yīng)時(shí)刻下的圖像坐標(biāo)可分別設(shè)為pi(xi,yi)、pi+1(xi+1,yi+1),對(duì)應(yīng)齊次坐標(biāo)關(guān)系可表示為XW、Xi、Xi+1。
于是根據(jù)攝像測量原理,測量點(diǎn)Pw與圖像坐標(biāo)點(diǎn)pi、pi+1的關(guān)系在齊次坐標(biāo)系下可表示為
式中λi與λi+1為比例系數(shù),K為像機(jī)內(nèi)參數(shù)矩陣(主要包含像機(jī)圖像主點(diǎn)(Cx,Cy)、等效焦距(Fx,F(xiàn)y),詳細(xì)可參考文獻(xiàn)[1]),Ri、Ri+1與Ti、Ti+1分別代表ti與ti+1世界坐標(biāo)系轉(zhuǎn)換到圖像坐標(biāo)系下的旋轉(zhuǎn)矩陣與平移向量,(R,T)可稱為像機(jī)外參數(shù)。相鄰時(shí)刻像機(jī)所處不同位置可以等價(jià)于雙目測量系統(tǒng),根據(jù)攝像測量原理,聯(lián)立式(1)、式(2)可建立雙目交會(huì)測量方程,利用已知像機(jī)內(nèi)外參數(shù)求解方程即可得到測量點(diǎn)的位置坐標(biāo),進(jìn)而可得到測量點(diǎn)處發(fā)生的形變值。
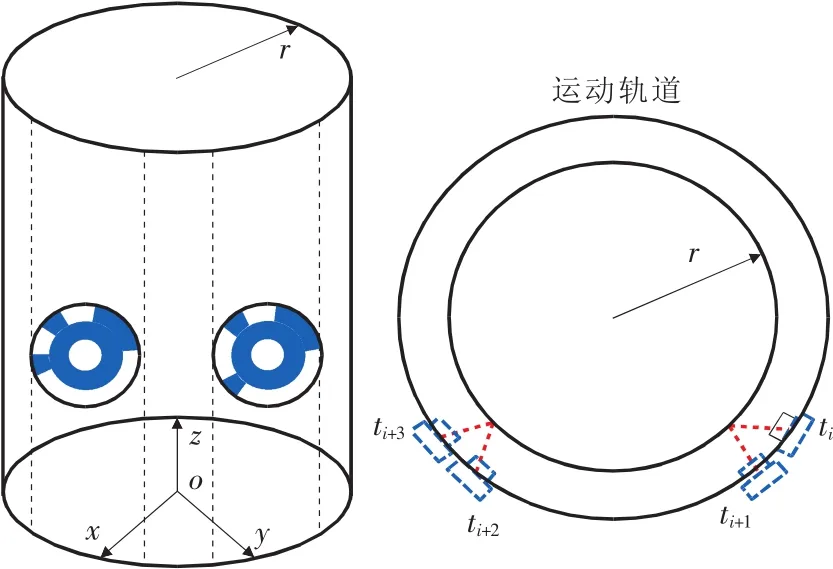
圖1 測量原理示意圖
在進(jìn)行全局測量之前,像機(jī)內(nèi)參數(shù)可以進(jìn)行離線高精度標(biāo)定[10],但像機(jī)外參數(shù)Ri與Ti會(huì)隨時(shí)間變化。如文獻(xiàn)[6]提出的方法雖然可以標(biāo)定外參數(shù),但是標(biāo)定過程繁瑣,實(shí)時(shí)性不強(qiáng),而且需要不斷移動(dòng)平面靶標(biāo)完成參數(shù)標(biāo)定。因此為了滿足全局動(dòng)態(tài)在線監(jiān)測的目的,仍需解決以下問題:1)提供一定的約束關(guān)系對(duì)運(yùn)動(dòng)過程中的像機(jī)位置及姿態(tài)角進(jìn)行高精度解算;2)對(duì)運(yùn)動(dòng)測量過程中的像機(jī)外參數(shù)進(jìn)行實(shí)時(shí)更新,確保外參數(shù)準(zhǔn)確穩(wěn)定。
2 測量系統(tǒng)外參數(shù)約束關(guān)系
為實(shí)時(shí)求解整個(gè)測量系統(tǒng)的外參數(shù)(即測量像機(jī)在不同的采集時(shí)刻下像機(jī)坐標(biāo)系與世界坐標(biāo)系間的實(shí)時(shí)位姿關(guān)系),首先根據(jù)理想情況下可控平臺(tái)與世界坐標(biāo)系之間的運(yùn)動(dòng)約束關(guān)系,初步完成任意時(shí)刻的系統(tǒng)外參數(shù)標(biāo)定;其次利用像機(jī)不同采樣視圖間的極性約束關(guān)系,求解出像機(jī)相鄰時(shí)刻間的外參數(shù)約束,進(jìn)而求解出系統(tǒng)外參數(shù)約束。最終將以上約束所得外參數(shù)進(jìn)行簡單數(shù)據(jù)融合,即可得到高精度的系統(tǒng)外參數(shù)。
2.1 理想條件下測量系統(tǒng)外參數(shù)標(biāo)定
在采集圖像相鄰時(shí)間內(nèi),不同位置的像機(jī)構(gòu)成雙目系統(tǒng),在全局測量過程中,存在許多等價(jià)雙目測量系統(tǒng),在每個(gè)系統(tǒng)外參數(shù)求取過程都有一個(gè)標(biāo)定過程,如果逐次進(jìn)行標(biāo)定則過程繁瑣。考慮根據(jù)運(yùn)動(dòng)平臺(tái)參數(shù)進(jìn)行像機(jī)不同時(shí)刻外參數(shù)標(biāo)定,從而達(dá)到自動(dòng)標(biāo)定任意時(shí)刻像機(jī)外參數(shù)的目的。
設(shè)世界坐標(biāo)系、平臺(tái)坐標(biāo)系、像機(jī)坐標(biāo)系之間的齊次坐標(biāo)關(guān)系分別為

聯(lián)立式(3)、式(4)可得世界坐標(biāo)系與像機(jī)坐標(biāo)系之間的齊次坐標(biāo)關(guān)系為

由于測量平臺(tái)與像機(jī)剛性連接,所以從運(yùn)動(dòng)平臺(tái)坐標(biāo)系到像機(jī)坐標(biāo)系的旋轉(zhuǎn)矩陣RBC和平移向量TBC均視為固定值,可以采用輔助像機(jī)全視場標(biāo)定法進(jìn)行標(biāo)定[1]。世界坐標(biāo)系到運(yùn)動(dòng)平臺(tái)坐標(biāo)系的旋轉(zhuǎn)矩陣RWB和平移向量TWB均隨時(shí)間ti變化,相應(yīng)的參數(shù)可表示為RWB,i與TWB,i,因此世界坐標(biāo)系到像機(jī)坐標(biāo)系的旋轉(zhuǎn)矩陣RWC,i與平移向量TWC,i可表示為

在理想狀態(tài)下,根據(jù)平臺(tái)的運(yùn)動(dòng)軌跡參數(shù)即可求得RWB,i與TWB,i,帶入式(6)即可完成測量系統(tǒng)的外參數(shù)求解。
2.2 相鄰時(shí)刻間外參數(shù)約束關(guān)系
由文獻(xiàn)[11]可知雙目測量系統(tǒng)的兩像機(jī)基線距、光軸以及基線夾角誤差等都會(huì)對(duì)三維測量精度產(chǎn)生重要影響。本文采用運(yùn)動(dòng)平臺(tái)進(jìn)行移動(dòng)式全局測量,平臺(tái)由于安裝精度、運(yùn)動(dòng)摩擦等因素產(chǎn)生的外參數(shù)標(biāo)定誤差成為影響測量精度的主要來源。
假設(shè)xi和xi+1分別為空間位置上某點(diǎn)相鄰時(shí)刻對(duì)應(yīng)像點(diǎn)的齊次坐標(biāo),根據(jù)文獻(xiàn)[12]則有極線約束關(guān)系:

式中,F(xiàn)為基礎(chǔ)矩陣表示兩幅圖像間的極線約束關(guān)系,本文參考使用經(jīng)典的8點(diǎn)算法[13]對(duì)基礎(chǔ)矩陣F進(jìn)行求解。考慮到基礎(chǔ)矩陣F同時(shí)與本質(zhì)矩陣E滿足以下關(guān)系:

式中[T]為由平移向量T定義的反對(duì)稱矩陣,對(duì)本質(zhì)矩陣E進(jìn)行奇異值分解可得兩次采集圖像時(shí)像機(jī)坐標(biāo)系間的旋轉(zhuǎn)矩陣R和平移向量T,即:

當(dāng)ti時(shí)刻時(shí),式(5)可表示為

聯(lián)立式(9)、式(10)可得各時(shí)刻像機(jī)坐標(biāo)系統(tǒng)一到世界坐標(biāo)系下的關(guān)系式:

因此相鄰時(shí)刻間的世界坐標(biāo)系到像機(jī)坐標(biāo)系間的旋轉(zhuǎn)矩陣RWC,i+1,i和平移向量TWC,i+1,i可表示為

同時(shí)由式(10)、式(11)可得相鄰間隔時(shí)間內(nèi)運(yùn)動(dòng)平臺(tái)坐標(biāo)系間的旋轉(zhuǎn)矩陣R與平移向量T,其滿足以下約束關(guān)系:
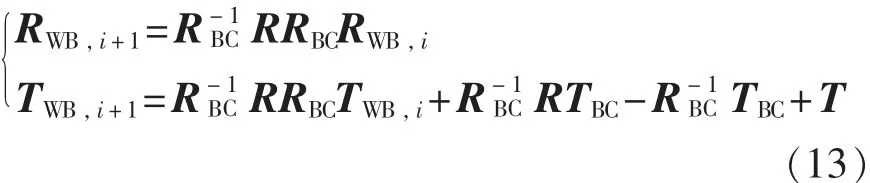
于是將式(6)中所得測量系統(tǒng)外參數(shù)作為標(biāo)定初值,然后根據(jù)式(12)中所得的相鄰時(shí)刻之間測量系統(tǒng)外參數(shù)約束關(guān)系對(duì)初值進(jìn)行校準(zhǔn),從而實(shí)時(shí)得到移動(dòng)測量系統(tǒng)的高精度外參數(shù)。
故在已知每個(gè)像點(diǎn)坐標(biāo)以及測量系統(tǒng)外參數(shù)后,即可根據(jù)交會(huì)測量原理解得測量點(diǎn)的世界坐標(biāo),進(jìn)而得到不同時(shí)刻間測量點(diǎn)處發(fā)生的形變值,完成對(duì)結(jié)構(gòu)件的形變安全監(jiān)測。
3 實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證測量方法的實(shí)用性,選取某儲(chǔ)油罐作為實(shí)驗(yàn)對(duì)象,實(shí)驗(yàn)過程中采用的設(shè)備為:HK-A5100像機(jī)(分辨率為2560pixel×2160pixel)、高精度運(yùn)動(dòng)平臺(tái)、棋盤格編碼標(biāo)定板、計(jì)算機(jī)。
通過安裝在移動(dòng)平臺(tái)的像機(jī)對(duì)被測量儲(chǔ)油罐的表面進(jìn)行圖像采集,提取表面標(biāo)識(shí)點(diǎn),通過計(jì)算運(yùn)動(dòng)平臺(tái)的外參數(shù)(世界坐標(biāo)系到平臺(tái)坐標(biāo)系的旋轉(zhuǎn)角RWB,i及平移向量TWB,i),將解算得到的旋轉(zhuǎn)角RWB,i和平移向量TWB,i帶入式(6)得到測量系統(tǒng)的外參數(shù)RWC,i和TWC,i的同時(shí),將其帶入式(5)即可解算出所測標(biāo)識(shí)點(diǎn)的三維坐標(biāo)。
具體實(shí)驗(yàn)步驟如下:
1)標(biāo)定像機(jī)內(nèi)參數(shù)。將棋盤格標(biāo)定板置于被測量設(shè)備的外表面,根據(jù)運(yùn)動(dòng)平臺(tái)軌跡,多次平行移動(dòng)像機(jī)位置,以完成對(duì)標(biāo)定板上標(biāo)志點(diǎn)的圖像采集,最終解算出精度可靠的像機(jī)內(nèi)參數(shù)。
2)根據(jù)測量目標(biāo)規(guī)劃合適運(yùn)動(dòng)路徑、選擇像機(jī)視角等。由于本文在相鄰時(shí)間間隔進(jìn)行圖像采集,等效于雙目測量系統(tǒng)。根據(jù)雙目測量系統(tǒng)的誤差來源,應(yīng)盡量使兩次成像時(shí)的像機(jī)光軸保持平行;綜合測量目標(biāo)的形狀限制,滿足標(biāo)識(shí)點(diǎn)在像機(jī)測量景深范圍內(nèi)時(shí)應(yīng)使運(yùn)動(dòng)軌跡的弧度盡可能大,相鄰兩次拍攝時(shí)間間隔盡可能小。
3)控制平臺(tái)做規(guī)則運(yùn)動(dòng)。獲取像機(jī)在不同時(shí)刻的位置變化,求解相鄰兩次成像間隔之間運(yùn)動(dòng)平臺(tái)的外參數(shù),并將其作為理想值。
4)相鄰時(shí)刻間像機(jī)外參數(shù)求取。根據(jù)第2節(jié)所述,由相鄰圖像間的極線約束關(guān)系可得任意時(shí)間ti至ti+1后,移動(dòng)平臺(tái)坐標(biāo)系先后位置間的旋轉(zhuǎn)矩陣R與平移向量T,進(jìn)而可得到任意時(shí)間下像機(jī)坐標(biāo)系與世界坐標(biāo)系之間的轉(zhuǎn)換參數(shù),最后根據(jù)第2節(jié)所述完成系統(tǒng)外參數(shù)融合。
5)測量點(diǎn)實(shí)際位置的求取。在獲得像機(jī)內(nèi)參數(shù)(見表1)以及ti時(shí)刻像機(jī)外參數(shù)的情況下,通過線性交會(huì)法測量得到儲(chǔ)油罐表面標(biāo)識(shí)點(diǎn)的三維坐標(biāo),并將所得三維坐標(biāo)作為其初值,再利用光束法平差對(duì)所得初值進(jìn)行優(yōu)化,最終得到測量標(biāo)識(shí)點(diǎn)的精確位置。通過求解相同標(biāo)識(shí)點(diǎn)在不同時(shí)刻監(jiān)測的數(shù)據(jù)進(jìn)而間接測得物體的結(jié)構(gòu)形變。

表1 像機(jī)內(nèi)參數(shù)標(biāo)定結(jié)果1)
考慮到運(yùn)動(dòng)平臺(tái)移動(dòng)速率和像機(jī)圖像采樣幀頻對(duì)實(shí)際測量精度可能造成的影響,設(shè)置了一個(gè)圓柱形的實(shí)心標(biāo)準(zhǔn)件代替理想情況下的儲(chǔ)油罐結(jié)構(gòu)(即未發(fā)生形變的儲(chǔ)油罐),并分別控制移動(dòng)平臺(tái)在不同運(yùn)動(dòng)速率νi、控制像機(jī)在不同采樣幀頻fi下對(duì)標(biāo)準(zhǔn)件進(jìn)行精度實(shí)驗(yàn)。在使用光束法平差求解過程中,為保證同一標(biāo)識(shí)點(diǎn)在相鄰采集圖像中出現(xiàn)次數(shù)盡可能多,首先保持采樣幀頻為3 frame/s,控制平臺(tái)在0.035~0.1 rad/s的速率范圍內(nèi)運(yùn)動(dòng),并將獲取的60個(gè)標(biāo)識(shí)點(diǎn)位置數(shù)據(jù)與標(biāo)準(zhǔn)數(shù)據(jù)進(jìn)行對(duì)比,所得測量誤差數(shù)據(jù)如圖2所示。保持平臺(tái)運(yùn)動(dòng)速率為0.06 rad/s,調(diào)節(jié)像機(jī)采樣幀頻在大于0.4 frame/s范圍內(nèi)進(jìn)行采樣,所得測量誤差數(shù)據(jù)如圖3所示。
由于在自然受載狀態(tài)下儲(chǔ)油罐結(jié)構(gòu)形變發(fā)生緩慢,實(shí)驗(yàn)以測量誤差相對(duì)較小的平臺(tái)移動(dòng)速率ν= 0.065 rad/s、采樣頻率f=5.5 frame/s連續(xù)對(duì)儲(chǔ)油罐結(jié)構(gòu)進(jìn)行圖像采集,最終得到的10組數(shù)據(jù)基本保持不變,其中一組實(shí)驗(yàn)數(shù)據(jù)擬合得到的被測儲(chǔ)油罐形狀如圖4所示。
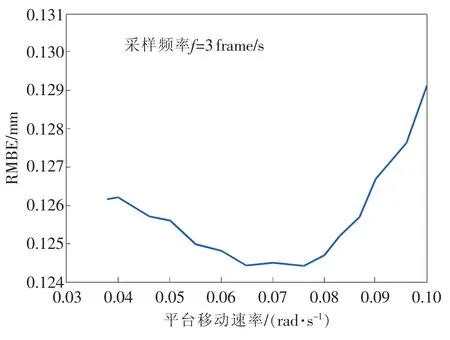
圖2 平臺(tái)移動(dòng)速率對(duì)精度的影響
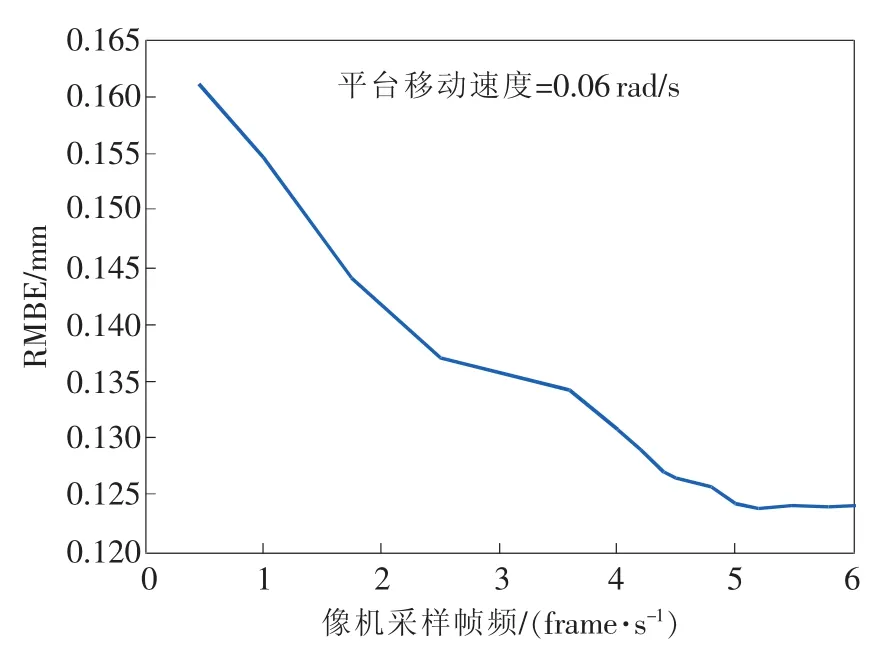
圖3 像機(jī)采樣幀頻對(duì)精度的影響
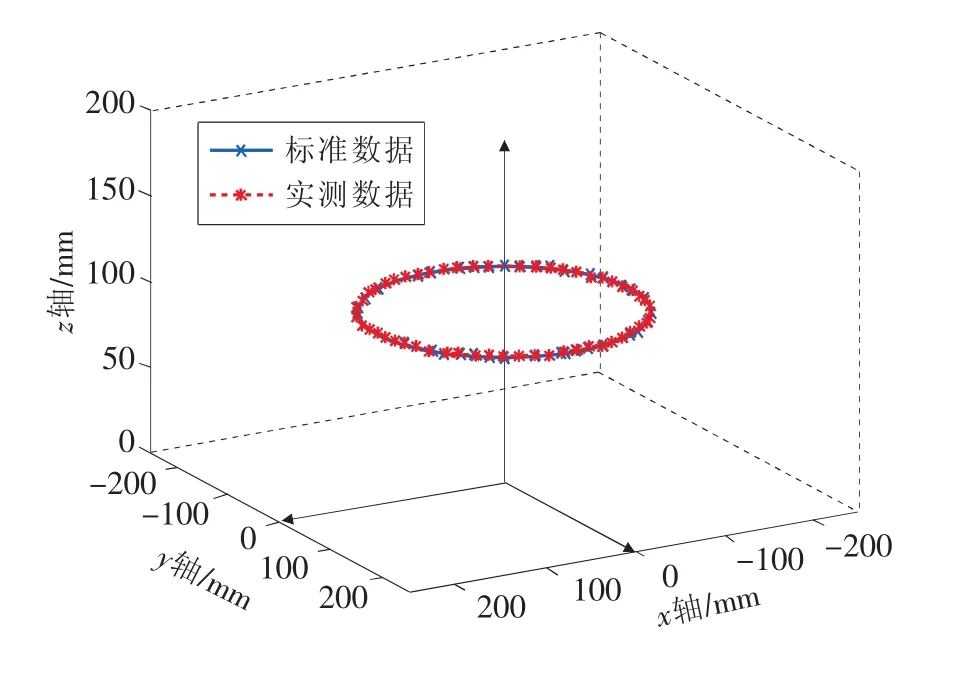
圖4 測量結(jié)果擬合圖
圖中含有像機(jī)繞儲(chǔ)油罐一周采集到的60個(gè)標(biāo)識(shí)點(diǎn)的位置,通過與所獲取的儲(chǔ)油罐標(biāo)準(zhǔn)數(shù)據(jù)對(duì)比可以發(fā)現(xiàn),文章提出的移動(dòng)式單目像機(jī)的三維測量方法理論正確,而且測量精度效果較好。為了定量地評(píng)估測量效果,現(xiàn)引入均方根誤差(RMSE)作為測量效果評(píng)估標(biāo)準(zhǔn),具體計(jì)算方法為

式中(xi,yi,zi),(x?i,y?i,z?i)分別代表某點(diǎn)的實(shí)測位置與標(biāo)準(zhǔn)位置,計(jì)算得到RMSE值為0.1237,可以看出測量所得的精度較高,可以滿足大型結(jié)構(gòu)的形變監(jiān)測要求,可在工程實(shí)際中進(jìn)行應(yīng)用推廣。
4 結(jié)束語
通過不同視圖之間的極線約束關(guān)系建立運(yùn)動(dòng)平臺(tái)之間的運(yùn)動(dòng)約束關(guān)系,以重投影誤差點(diǎn)為目標(biāo)函數(shù),通過簡單數(shù)據(jù)融合方法將通過約束關(guān)系得到的運(yùn)動(dòng)參數(shù)與通過運(yùn)動(dòng)軌跡解算的運(yùn)動(dòng)參數(shù)進(jìn)行有效融合,完成了移動(dòng)式像機(jī)平臺(tái)的實(shí)時(shí)外參數(shù)標(biāo)定與修正。實(shí)驗(yàn)結(jié)果表明,該方法可以實(shí)現(xiàn)大型結(jié)構(gòu)形變的動(dòng)態(tài)全局測量,且使全局測量自動(dòng)化程度明顯提高。但同時(shí)方法也存在以下不足:1)由于像機(jī)分辨率較高,受到幀率的影響,像機(jī)在移動(dòng)過程中進(jìn)行圖像采集時(shí)會(huì)產(chǎn)生一定的模糊,影響標(biāo)識(shí)點(diǎn)匹配的精度,進(jìn)而影響測量結(jié)果精度。2)本文采用固定位置標(biāo)記標(biāo)識(shí)點(diǎn)、固定時(shí)間進(jìn)行圖像采集的方法,對(duì)標(biāo)記點(diǎn)位置及相機(jī)采集圖像時(shí)間間隔要求較高,后續(xù)工作可以考慮采用圖像識(shí)別方法進(jìn)行測量區(qū)域自動(dòng)識(shí)別。
[1]于起峰,尚洋.攝像測量學(xué)原理與應(yīng)用研究[M].北京:科學(xué)出版社,2009:53-55.
[2]于起峰,尚洋,伏思華,等.大型結(jié)構(gòu)變形及形貌攝像測量技術(shù)研究進(jìn)展[J].實(shí)驗(yàn)力學(xué),2011,26(5):479-490.
[3]苑云,張小虎,朱肇昆,等.大型風(fēng)力發(fā)電葉片變形的攝像測量方法研究[J].計(jì)算機(jī)應(yīng)用,2012,32(增刊1):114-117.
[4]苑云.大型結(jié)構(gòu)形變的組網(wǎng)攝像測量方法研究[D].長沙:國防科技大學(xué),2013.
[5]張小虎,邸慧,周劍,等.一種單像機(jī)對(duì)運(yùn)動(dòng)目標(biāo)定位的新方法[J].國防科技大學(xué)學(xué)報(bào),2006,28(5):114-118.
[6]孫軍華,張廣軍,巍振忠,等.基于平面靶標(biāo)的視覺測量數(shù)據(jù)拼接方法[J].機(jī)械工程學(xué)報(bào),2006,42(7):192-195.
[7]戴相龍.三維非接觸式測量中編碼標(biāo)志的研究與應(yīng)用[D].西安:電子科技大學(xué),2014.
[8]楊根齊,湯寶平,蔣恒恒.基于圓環(huán)點(diǎn)的亞像素?cái)z像機(jī)自標(biāo)定方法[J].中國測試,2009,35(3):107-109.
[9]張浩鵬,王宗義,吳攀超,等.攝像機(jī)標(biāo)定的棋盤格模板的改進(jìn)和自動(dòng)識(shí)別[J].儀器儀表學(xué)報(bào),2014,33(5):1102-1109.
[10]ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis&Machine Intelligence,2000,22(11):1330-1334.
[11]張劉,支帥.雙目測量系統(tǒng)目標(biāo)相對(duì)位置誤差分析[J].紅外與激光工程,2014,43(增刊1):116-122.
[12]張軍.視覺測量[M].北京:科學(xué)出版社,2008:146-152.
[13]HARTLEY R.In defense of the eight-point algorithm[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(6):580-593.
(編輯:李妮)
A large-scale structure deformation monitoring method based on mobile digital camera
LIU Lianxiong,HU Changhua,HE Chuan,ZHOU Zhijie,ZHAO Yushan
(Department of Control Engineering,Rocket Force University of Engineering,Xi’an 710025,China)
A online deformation monitoring method utilizing a mobile digital camera and floating plat based on video metrics is proposed to resolve problem that there exist excessive measure equipment and high cost.Firstly,the epipolar geometry inhibition among different views is used to compute the extrinsic parameter restriction of plat and digital camera at different time.Then,it is fused to the extrinsic parameters calculated based on the plat track and the camera extrinsic parameters can be measured automatic.Finally,the position of marker point is measurement under the intrinsic and extrinsic parameters during different time.Experiments show that the proposed method has the advantage of simple measurement device and high precision,and it can be applied into online deformation monitoring for large-scale structure.
globalmeasurement;on-linemonitoring;epipolar geometry inhibition;extrinsic parameter
A
1674-5124(2017)05-0011-04
10.11857/j.issn.1674-5124.2017.05.003
2016-11-15;
2017-01-09
國家自然科學(xué)基金(61573365,61370031)
劉煉雄(1993-),男,湖南婁底市人,碩士研究生,專業(yè)方向?yàn)榇笮徒Y(jié)構(gòu)形變的攝像測量。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
