基于SOC的多軸穩定系統回路控制
2017-06-10 08:38:04張學梅閆光亞
導航與控制 2017年3期
張學梅,趙 友,閆光亞
(北京航天控制儀器研究所,北京100039)
基于SOC的多軸穩定系統回路控制
張學梅,趙 友,閆光亞
(北京航天控制儀器研究所,北京100039)
圍繞基于多通道信號處理與控制SOC芯片實現慣性平臺系統典型控制回路,進行了設計方法、流程及最終實現結果的闡述。首先,依據平臺系統的要求制定系統工作流程;之后根據硬件資源進行各工作流程的分配和調整;再進行數據采集處理、算法實現、過程數據處理、PWM輸出處理、其他輸出量處理;最終通過功率級將電信號傳輸給平臺上的執行元件,實現平臺系統四條典型控制回路。此方法能夠適應多種算法和系統需求,可實現自主化、小型化,且功耗小、可靠性高。
SOC;回路;控制
0 引言
本文通過理論分析、仿真及最終實現,介紹了一種基于多通道信號處理與控制SOC的慣性平臺系統典型回路控制設計方法。
平臺控制回路傳統實現方式是通過多級運放實現控制算法的模擬電路,因其體積大、功耗大及適應性差,漸漸不能滿足需求。為解決此問題,近年來出現了基于FPGA和DSP實現的數字電路,因基于FPGA實現平臺的數字控制相對開發時間較長,且國產成熟FPGA芯片只有600萬門,不滿足使用要求,只能依賴進口芯片,無法國產化;而基于DSP的設計,因其資源有限,不易同時實現平臺多條回路控制或較復雜算法,無法滿足日益增長的使用需求。
多通道信號處理與控制SOC(簡稱SOC)是一款適用于多通道控制信號處理應用的高性能定點DSP處理器。它基于片上總線,共集成了8個高性能的自主指令集DSP處理器核。它們可以根據不同通道的處理特點分別加載不同的應用程序,在中心處理器核控制下協同處理同一任務。基于SOC進行平臺控制回路設計,可有效克服模擬回路的弊端,并解決開發時間長、資源不足等問題。
1 總體設計
1.1 解決主要問題
本文主要解決:克服現有技術的不足,提供一種基于SOC的慣性平臺系統典型回路控制設計方法。此方法基于可靠的硬件保證,能夠適應多種算法和系統需求,可實現自主化、小型化,且功耗小、可靠性高。
1.2 技術方案
基于SOC的平臺系統所有回路特別是穩定回路的控制技術,實現形式示意圖如圖1所示。
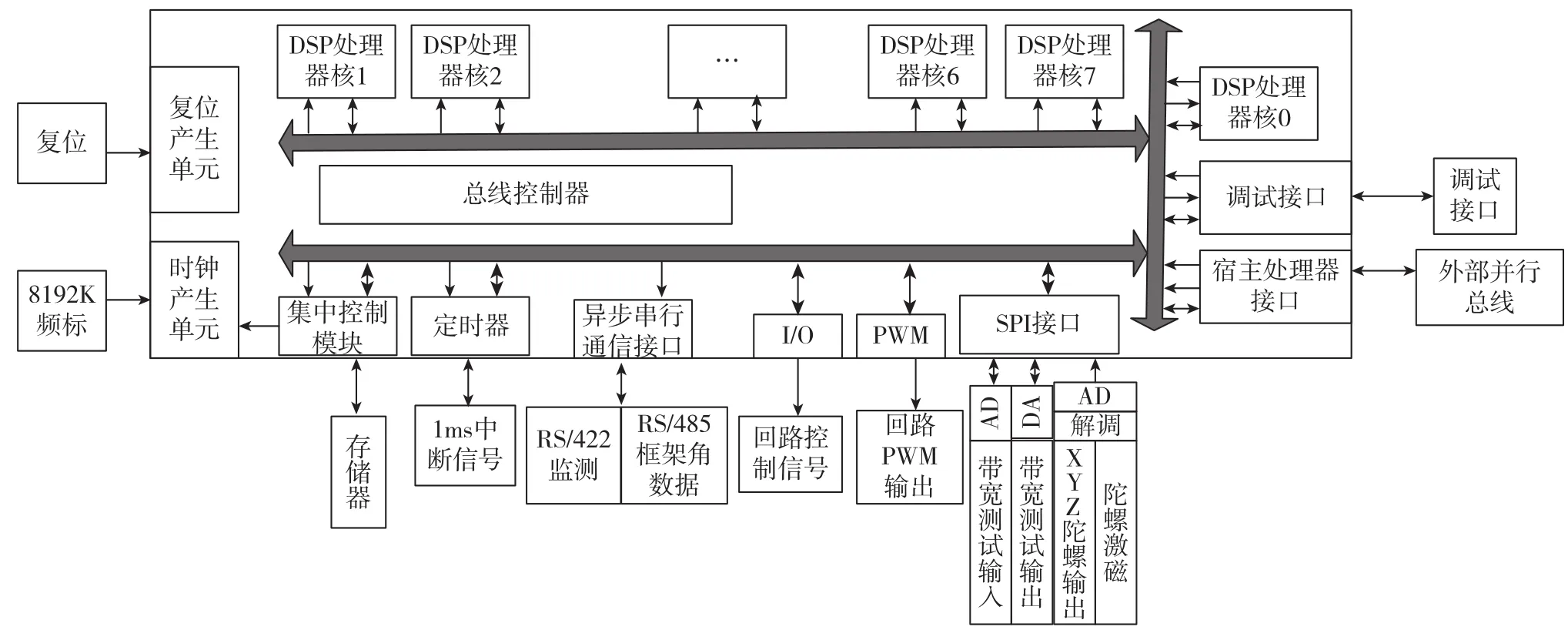
圖1 實現形式示意圖Fig.1 Diagram of implemention form
(1)主CPU通信方式
通過并行總線與主CPU通信,含各回路狀態控制信號,以及石英表信息等。
(2)回路實現
在設計回路的實現方式時,考慮在采樣頻率可達到10~20倍激磁頻率的情況下,將信號和激磁直接通過AD采樣,在SOC內部實現信號解調的方法,2kHz的姿態角信號采集使用此方式實現;但平臺穩定回路中陀螺激磁已達到8kHz,單路采樣頻率至少要達到80kHz,在需節省空間的前提下,只用一片AD實現多路信號采集,采樣頻率還要翻倍,不易實現。最終采用通過控制AD采樣實現將解調后的陀螺輸出信號(模擬量)轉化為數字量,并進行濾波算法的處理;再經專用算法計算后,進行PWM輸出轉換。
其他回路實現方法基本類似,只是輸入信號形式不同,姿態角和石英表信號從異步串行接口和并行總線接收。平臺系統回路控制輸入輸出示意圖如圖2所示。

圖2 平臺系統回路控制輸入輸出示意圖Fig.2 Diagram of control loops’for platform system I/O
2 根據硬件資源進行各工作流程的分配和調整
多通道信號處理與控制SOC主要由時鐘產生單元(CGU)、復位產生單元(RGU)、自主指令集DSP處理器核、調試接口單元(DSU)、宿主處理器接口(PIU)、串行外設接口(SPI)、定時器(Timer)、異步串行通信接口(ARTU)、集中控制模塊(Center)和總線控制器(AHB_Ctr)組成,其邏輯結構如圖2所示。除了全局復位和時鐘輸入信號外,芯片對外接口由宿主處理器接口、調試接口、2個異步串行通信接口、8個SPI接口、定時器、擴展存儲器接口和可測性設計接口等組成。控制與信息處理多核SOC芯片邏輯結構如圖3所示。
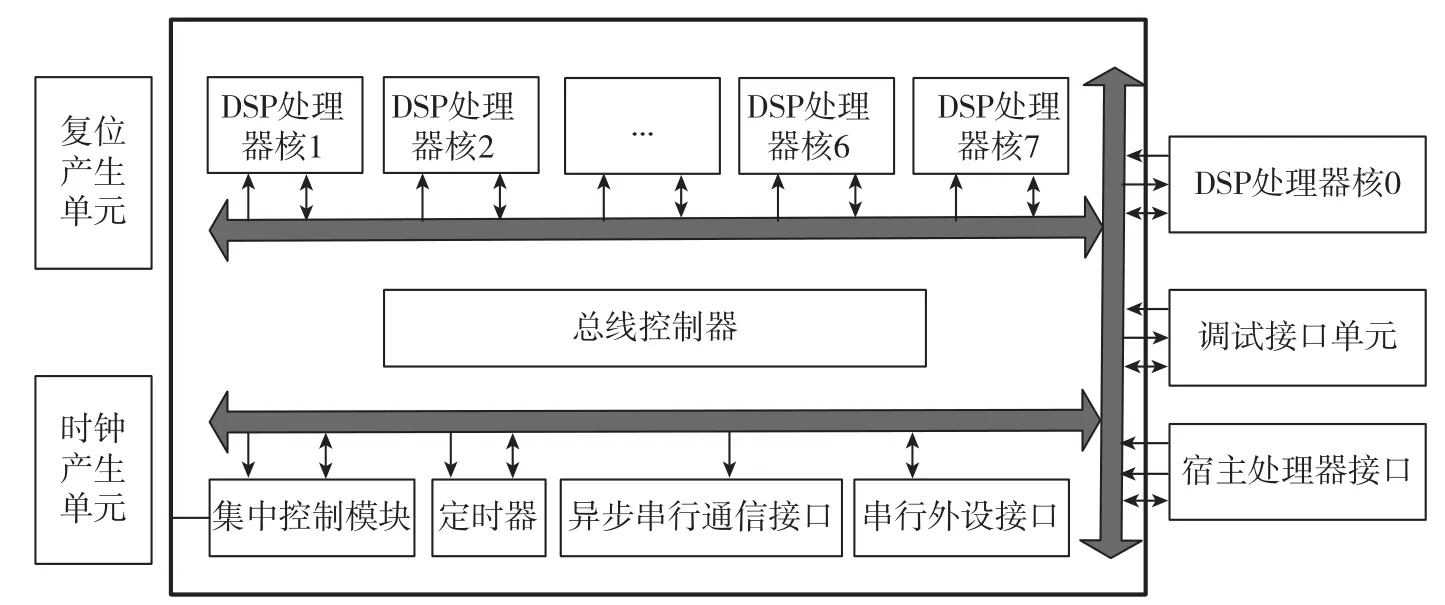
圖3 控制與信息處理多核SOC芯片邏輯結構Fig.3 Structure ofcontrol and information processing multicore SOC chip
2.1 通過并行總線與主CPU通信
對應1.2節的主CPU通信方式,通過宿主處理器接口,按其8位字節訪問模式,即8位數據總線、4位地址總線和相關讀寫控制線,實現與主CPU通信的需求。
2.2 時鐘
SOC上共有17個時鐘域。將其中的SlowClk用于異步串行通信接口和DSU接口,使串行通信不受片上時鐘工作頻率的影響;7個協同處理器核在SubClk1~7與SubClkB1~7時鐘域下工作,在使用過程中,為降低系統功耗,將暫時不使用的協同處理器核對應的工作時鐘,通過設置片上時鐘使能寄存器(ClkOffReg)暫時關閉;MainClk與MainClkB已被用作中心處理器核的工作時鐘,片上其他電路(PIU、SPI、Timer等)則采用MainClk時鐘域。
MainClk、SubClk1~7有內外兩種模式,選用由外部管腳提供的系統時鐘,從而保證系統工作同步。
2.3 DSP資源及回路實現
SOC中基于片上總線集成8個高性能的DSP處理器核,僅中心處理器(DSP處理器核0)可主動程序加載,用于實現處理程序的自加載,及其他7個從處理器的管理(DSP處理器核1~7)。
對應1.2節的回路實現,由主處理器實現數據處理,7個從處理器負責實現各回路算法,其中3條穩定回路及一條隨動回路分別占用一個從處理器。
2.4 接口
通過SOC的8個SPI接口對Flash存儲器、E2PROM存儲器的控制與訪問,實現程序加載以及對8bit~16bit AD或DA轉換器的控制實現數據輸入和帶寬測試。
3 數據采集及處理
3.1 數據采集
在前文已提到,根據不同的回路有不同輸入接口:通過2.4節中的方式SPI接口對外設AD芯片的控制,實現模擬量和數字量之間的轉換或從總線接口、串口等直接接收數字量。直流信號采樣頻率設為1kHz~4kHz,2kHz交流正弦信號采樣頻率設為信號頻率的16倍。
3.2 數據處理
解調后的陀螺輸出信號為直流信號,通過AD中采到的數據進行臨近8次的求和處理而降低數據采集誤差;未經解調的姿態角輸出信號(姿態角信號尚未實現串口傳輸)為2kHz的交流正弦信號,取臨近16次采樣的和作為數據輸入,因采樣周期與實際信號周期非整數倍,采到的數據有小幅波動,但不影響回路性能。
4 算法實現及輸出
4.1 回路控制算法
按照SOC芯片可實現的通用算法實現模式,對回路的濾波和校正部分按式(1)進行轉換:
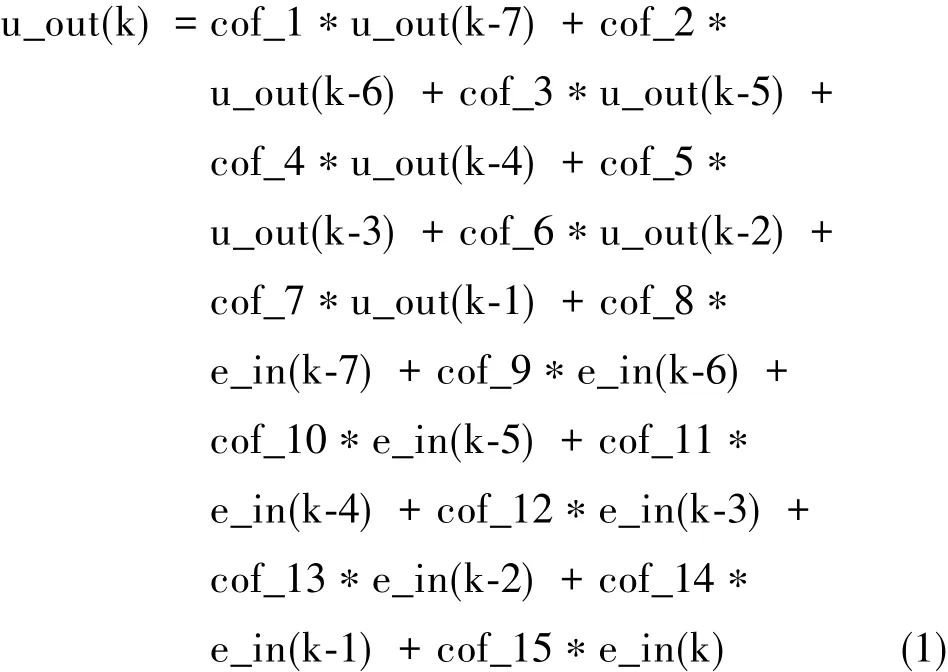
其中,u_out為輸出量,e_in為輸入量,cof_n為系數,k-n為相對于當前時刻的前n時刻。
上述方法可實現大多數回路的使用要求,包括需要分段控制的回路。更改回路參數只需改寫cof系數即可,該系數被直接存儲于寄存器中,程序運行時,讀取寄存器中的值。
4.2 PWM輸出
PWM信號通過SOC的GPIO實現,經74ALVC164245隔離后驅動至SNJ5407J。首先,將算法的計算結果通過可配置為PWM或定時器的接口TINT2-TINT5(片內使用32位定時器實現)轉換為脈寬調制信號,分辨率根據實際選為15位,通過SOC最大輸出電流能達到25mA的PWM專用I/O口輸出,再通過功率級給到平臺上的執行機構,完成平臺系統各控制回路的工作。
5 回路實現
目前,已實現了平臺3個軸的穩定回路及隨動回路控制。
5.1 臺體軸穩定回路實現
根據回路特性進行臺體軸穩定回路設計,其Simlink仿真模型如圖4所示,系統開環Bode圖如圖5所示,系統閉環Bode圖如圖6所示,系統輸出的階躍響應圖如圖7所示。
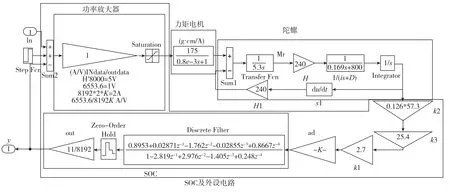
圖4 臺體軸穩定回路Simlink仿真模型Fig.4 Simulation model of the platform axis stabilization loop“Simlink”

圖5 臺體軸穩定回路開環Bode圖Fig.5 System open-loop characteristics
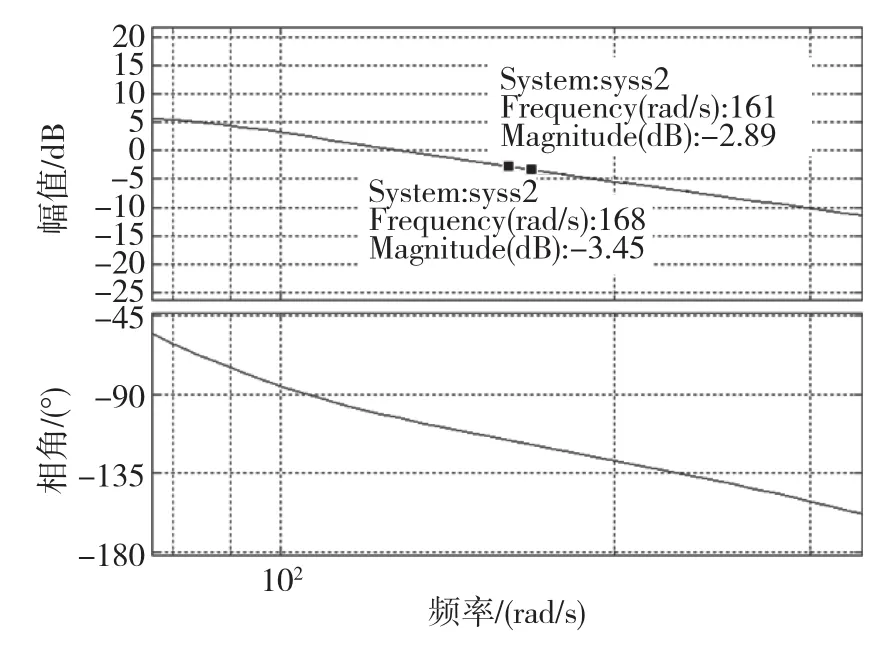
圖6 臺體軸穩定回路閉環Bode圖Fig.6 System close-loop characteristics
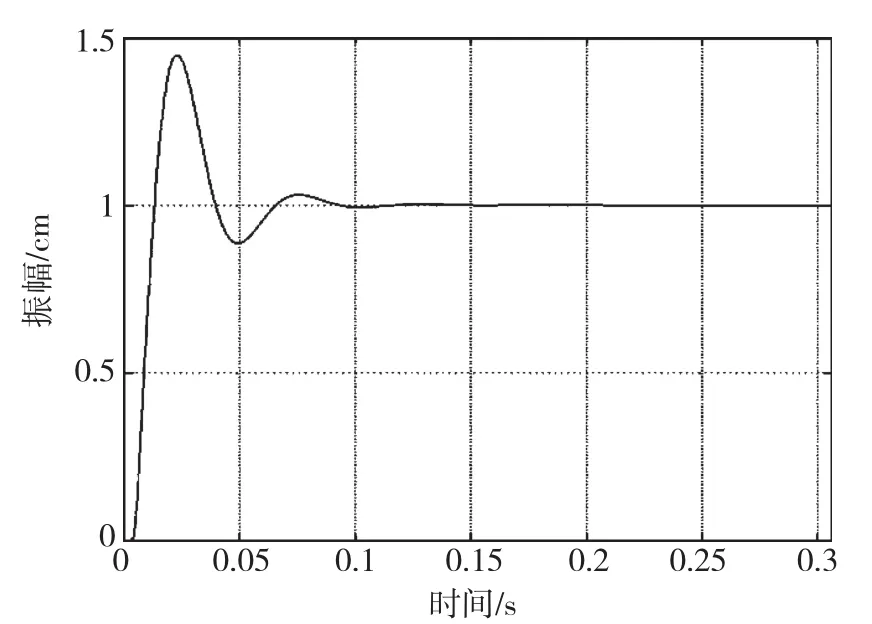
圖7 臺體軸穩定回路階躍響應圖Fig.7 System output of step response
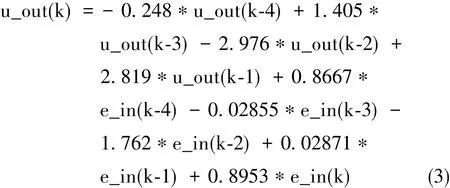
其校正部分傳函為(采樣頻率4kHz):
式(2)按式(1)轉換為:
由圖5~圖7可得到回路參數為:帶寬27.1Hz,相裕度38°,幅值裕度16.1dB,調節時間<0.1s(取0.5%誤差帶),滿足回路要求。從而證明,通過上述方法設計的平臺臺體軸穩定回路,可滿足平臺系統要求。
5.2 其他回路實現
為進一步證明上述方法的正確性,對平臺內環軸穩定回路、平臺外環軸穩定回路、平臺隨動回路進行設計,最終實現的回路參數如表1所示。
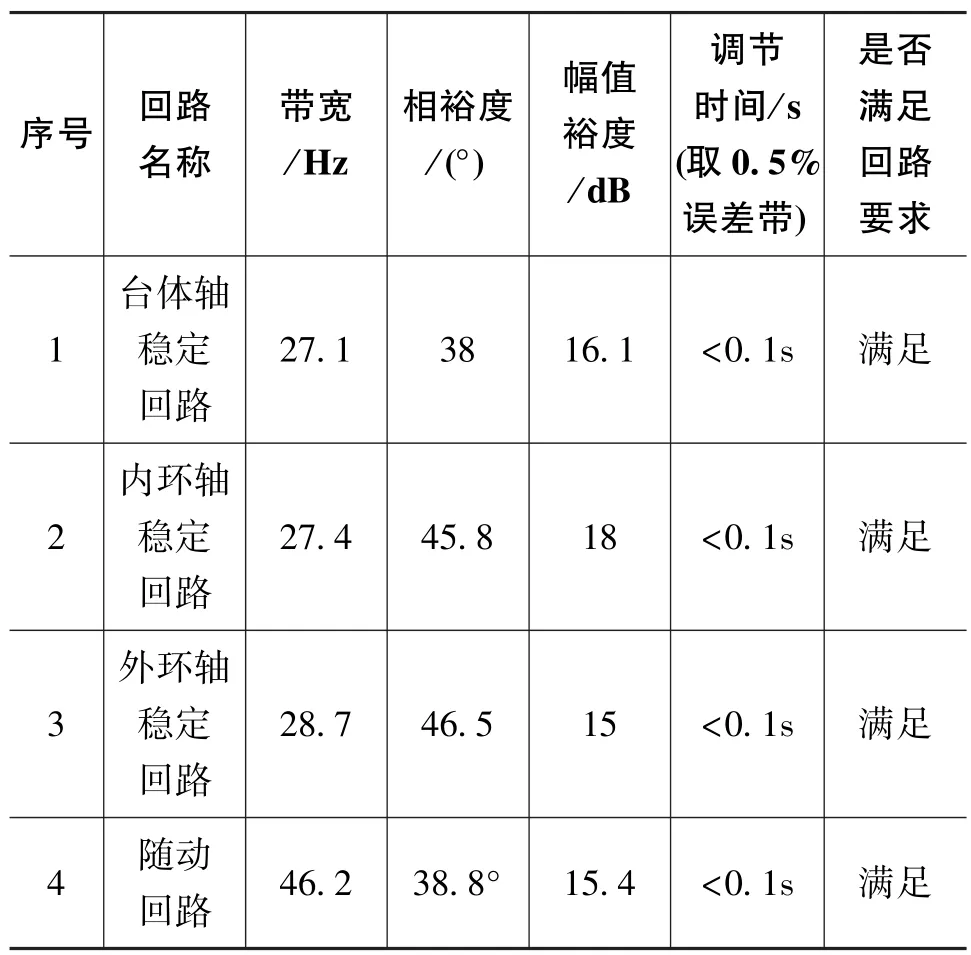
表1 回路參數Table 1 Loop parameters
表1數據進一步證明,通過上述方法設計的平臺4條典型回路,可滿足平臺系統要求。該設計方法對于慣性平臺系統中的其他典型回路——調平回路、鎖定回路、陀螺加速度計伺服回路等也同樣適用。
6 結論
本文提出了基于SOC芯片實現慣性平臺系統典型回路控制方法,并進行了平臺4條典型回路的具體實現。該方法滿足多種算法和系統需求,可實現自主化、小型化,且功耗小、可靠性高。
[1]黃忠霖.自動控制原理的MATLAB實現[M].北京:國防工業出版社,2007.HUANG Zhong-lin.MATLABachieveofautocontrol theory[M].Beijing:NationalDefenseIndustry Press,2007.
[2]付夢印,鄧志紅,張繼偉.Kalman濾波理論及其在導航系統中的應用[M].北京:科學出版社,2003.FU Meng-yin,DENG Zhi-hong,ZHANG Ji-wei.Kalman filtering theory and applied in the navigation system[M].Beijing:Science Press,2003.
[3]薛定宇.控制系統仿真與計算機輔助設計[M].北京:清華大學出版社,2007.XUE Ding-yu.Controlsystem simulation and computer aided design[M].Beijing:Tsinghua University Press,2007.
[4]謝紅衛,鄒逢興,張明,等.現代控制系統(第8版)[M].北京:高等教育出版社,2001.XIE Hong-wei,ZOU Feng-xing,ZHANG Ming,et al.Moderncontrolsystem(8th)[M].Beijing:Higher Education Press,2001.
[5]冷建華,李萍,王良紅.數字信號處理[M].北京:國防工業出版社,2002.LENG Jian-hua,LI Ping,WANG Liang-hong.Digital signal procdssing[M].Beijing:National Defense Industry Press,2002.
[6]劉金琨.先進PID控制Matlab仿真[M].北京:電子工業出版社,2004.LIU Jin-kun.Simulation of advanced PID control using Matlab[M].Beijing:Electronics Industry Press,2004.
[7]夏瑞花,吳董軍.PID控制算法的應用技巧[J].中國科技財富,2009(24):68.XIA Rui-hua,WU Dong-jun.The application skills of PID control arithmetic[J].Technological Fortune of China,2009(24):68.
[8]劉彬,譚建平,黃長征.一種改進PID控制算法的研究與應用[J].微計算機信息,2007,23(16):15-17.LIU Bin,TAN Jian-ping,HUANG Chang-zheng.Investigation and application of a kind of advanced PID control arithmetic[J].Microcomputer Information,2007,23(16):15-17.
The General Control-loop Technology for Multi-axis Stabilization System Based on the SOC Chip
ZHANG Xue-mei,ZHAO You,YAN Guang-ya
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
In this paper,it realizes all of the control loops for platform system based on multi channels signal processing and control SOC chip.Firstly,the population system of platform system using control loops is added in the system for the new generation workflow.Secondly,hardware resources are allocated to the workflow.It designs data processing,algorithm,data process,PWM signal conversion.At last,electrical signals are transferred to control actuator by power amplifier.The method can adapt to various algorithms requirements of system,and it can realize autonomous,small size,low power consumption and high reliability.
SOC;loop;control
V242.4
A
1674-5558(2017)01-01290
10.3969/j.issn.1674-5558.2017.03.006
張學梅,女,碩士,高級工程師,研究方向為平臺電氣系統。
2016-07-04
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16