混合翼無人機的設計
2017-06-10 20:02:53劉輝陳立業鄒馨毅馬思遠
電子技術與軟件工程 2017年11期
關鍵詞:設計
劉輝++陳立業++鄒馨毅++馬思遠
摘 要針對如今市面上航拍器飛行速度慢,不能很快達到指定地點,當搭載較大攝影設備時,需要體積大,價格昂貴的多軸飛行器的現狀。本文設計一款以載重量高,速度較快可垂直起降為特點的四軸與固定翼為一體的無人機。著重研究垂直轉平飛狀態及飛機的空氣動力設計。
【關鍵詞】混合翼無人機 氣動布局 設計 飛控
1 引言
本文所設計的混合翼無人機中提及的混合翼體現在飛機起降階段,采用四旋翼的垂直起降方式,通過控制四個涵道電機的輸出功率來控制飛機起降的平衡;平飛階段,則是同固定翼一樣通過控制舵機來改變飛機的翼面來控制飛機的飛行姿態,此時涵道只是用做動力輸出。所以本飛機設計的第一性能特點在于當飛機滿載時依然具有較好的操作性和自行穩定性。用于投放救災藥品、救生設備以及拍攝具有非常可靠的性能,飛機空機重量輕,飛機體格大,其突然優點是不用考慮環境隨意降落。
2 硬件部分
2.1 總體布局
本文所設計的無人機,飛機翼展2.2米,空重3Kg,使用4臺涵道機,額定轉速42000r/min。飛行速度45km/h,最小轉彎半徑40米,最大爬升角度40°,高強的機動性和載重能力主要面向山區、城市等飛行環境密集狀況下的短途貨物運輸和拍攝工作。
飛機主體結構采用優質的航空層板和巴爾沙輕木制作,采用熱縮膜作為蒙皮,主要承力結構使用碳纖維復合材料和鋁合金相配合,具有空機結構重量輕,制造成本低,加工工藝簡單的特點。
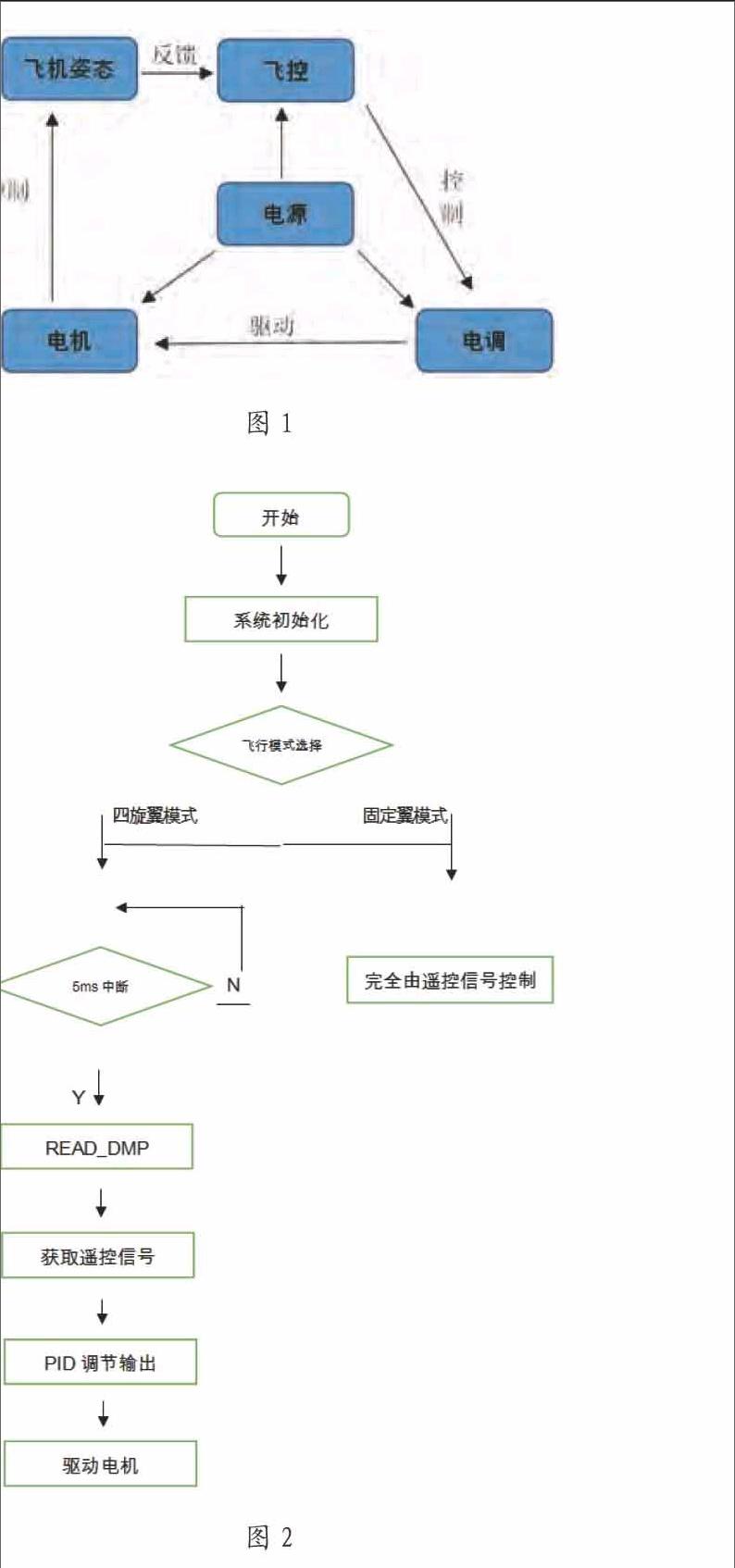
垂尾選擇使用雙尾梁結構,一般來說,更大的機身和更大的翼展通常意味著更大的航程。更大的機身,機身結構和操作系統、機載設備所占用的空間和重量比例小,負載空間更大,設計上電池位置也更容易配平。更大的翼展有更好的展弦比,升阻比提升,節約能量。圖1是整個設計系統的設計框圖。
2.2 機翼平面設計
本機型設計巡航速度為45Km/h,屬于慢速無人機,在做氣動設計時無需考慮空氣壓縮性及激波阻力的影響,1/4弦線后掠角設為0°,通常大展現比機翼的誘導阻力會更小,機翼的三維效應較小,會有更高的升阻特性,通常梢根比0.45時最接近橢圓形環量分布。根據以往設計經驗及常用航模制作材料情況綜合考慮,初步將本機翼翼根弦長設為0.3米,翼梢弦長0.25米,翼展2.2米,作為后續詳細氣動設計的參考性進行計算。
2.3 動力系統
為了能夠實現垂直起降以及提高平飛時的機動性能,我們采用涵道電機作為飛機的動力輸出,將四個涵道電機置于左右機翼前后構成X型,起降階段,四個涵道類似于四旋翼無人機的四個螺旋槳,由飛控控制其輸出功率使飛機平穩起飛;平飛階段由舵機連接涵道,實現涵道的90度旋轉,此時飛機結構變成普通的固定翼進行控制。
2.4 涵道旋轉結構設計
如圖所示,經過車床加工的鋁合金件1一端通過螺絲與連接片固定在尾梁上,另一端與涵道相連接,起到懸掛電機的功能。鋁合金件2固定在涵道發動機上,通過碳纖維桿與固定在機身上的舵機相連接。起飛時,四個涵道發動機均與地面成垂直狀態,提供飛機離地所需升力。當飛機達到預定高度后,通過舵機的轉動帶動涵道發動機沿逆時針方向旋轉90°,使飛機平飛。
3 軟件部分
飛行控制器的設計是基于ST公司生產的STM32F103C8T6芯片,應用專門設計的ARMCortexM-3內核,擁有豐富的片上資源,相比市面上的成品飛控,可大大降低系統的開發成本,節約資源。此款飛控的開發是在Keil平臺下完成的,主要完成硬件平臺初始化、飛行姿態解算、遙控信號解碼、電機以及舵機控制、飛行模式轉換等工作,圖2是整個飛控的控制流程圖。
3.1 姿態解算
飛行姿態解算方面,采用MPU6050官方的基于MSP430的DMP庫,將它移植到STM32平臺下,可直接輸出四元數,在通過轉算得到歐拉角,即獲得飛機此時的姿態;
3.2 遙控信號解碼
遙控信號解碼方面,此款飛控采用的是天地飛9通道遙控器,通過stm32的定時器輸入捕獲功能捕獲遙控器接收機輸出的不同占空比的PWM信號來讀取各通道的控制量。
3.3 電機控制
電機的控制方面,通過遙控信號獲取期望的控制值與解算出的當前的姿態做對比來控制電機的輸出量,采用的角度和角速度的雙閉環PID算法,角度的誤差被作為期望輸入到角速度控制器中 (角度的微分就是角速度),采用雙環PID能改善機身飛行過程中的自旋問題并有效的提高飛行系統的穩定性。
4 總結
在機身結構足夠強的情況下,同過遙控進行飛行模式的轉換,實現飛機的平穩的垂直起降,以及在平飛階段具有明顯的高機動性能。此款飛機的實際尺寸與重量超過了起初設計的參數,但是四個涵道的推力仍能夠滿足動力需求,只是電力消耗上會稍微有些大,是飛機的續航能力不是很好,后續希望可以通過改進機身結構和優化供電方案來提升飛機的續航能力。
參考文獻
[1]吳勇,羅國富.四軸飛行器DIY—基于stm32微控制器[M].北京:航空航天大學出版社,2016.
[2]秦永元著.慣性導航[M].北京:科學出版社,2014.
[3]黃小平著.卡爾曼濾波原理及應用[M].北京:電子工業出版社,2015.
[4]蒙博宇著.stm32自學筆記[M].北京:航空航天大學出版社,2014.
作者單位
中國民航大學 天津市 300300
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04