上肢康復機器人建模與力反饋控制策略實驗研究
2017-06-15 18:31:09李雅楠左國坤崔志琴施長城劉永永
制造業自動化 2017年5期
李雅楠,左國坤,崔志琴,施長城,劉永永
(1.中北大學,太原 030051;2.中國科學院寧波材料技術與工程研究所,寧波 210094)
上肢康復機器人建模與力反饋控制策略實驗研究
李雅楠1,2,左國坤2,崔志琴1,施長城2,劉永永2
(1.中北大學,太原 030051;2.中國科學院寧波材料技術與工程研究所,寧波 210094)
為改善患者在使用上肢康復機器人過程中的人機交互感,提升康復訓練中人的體驗感,在經典控制策略中加入力反饋環節。建立基于力反饋控制算法的上肢康復機器人控制模型。基于Simulink對力反饋控制算法進行仿真,獲取實驗結果并進行驗證分析。通過仿真實驗能夠得出力反饋控制算法的有效性,并利用上肢康復機器人進行實驗驗證。實驗結果表明該力反饋控制模型的有效性患者主動參與康復訓練的目的。
上肢康復機器人;力反饋控制;康復訓練;建模分析
0 引言
上肢康復機器人是一種用于腦卒中等運動功能損傷患者進行物理治療的康復機器人。20世紀80年代,全球有50多個從事康復機器人研究的機構[1],這些機構大多分布在科技和工業發達的美國、歐洲和日本等。1990年之后康復機器人開始受到全世界范圍內科研工作者的重視[2]。上肢康復機器人訓練動作設計合理、趣味性強,可明顯提高患者的依從性、訓練積極性、主動性和康復信心[3]。
傳統康復醫學領域中的康復訓練存在一些不足和局限性,若將虛擬現實技術、力反饋技術同機器人相結合并利用力反饋控制方法,應用到康復訓練中[4]。能夠有效改善傳統康復訓練方法的不足。也有研究指出,外科醫生和機器人專家認為現在已有的機器人康復訓練系統缺少必要的接觸反饋[5]。伴隨著康復治療領域中虛擬現實技術與力反饋技術的深入應用,康復機器人勢必會帶來一種全新的意義深遠的訓練手段。
康復機器人的應用領域里,反饋技術和虛擬現實技術有其不可取代的地位和必要性。基于此,本文對上肢康復機器人進行力反饋控制研究,構建力反饋控制策略模型,并利用MATLAB/Simulink實驗平臺建立仿真試驗系統,驗證分析該策略的性能。與以往國內上肢康復機器人控制方法研究的不同[6],文中的上肢康復機器人包括主動訓練模式,助動訓練模式,被動訓練模式和示教模式四種訓練模式。而本文的研究是在康復機器人主動模式下進行的。
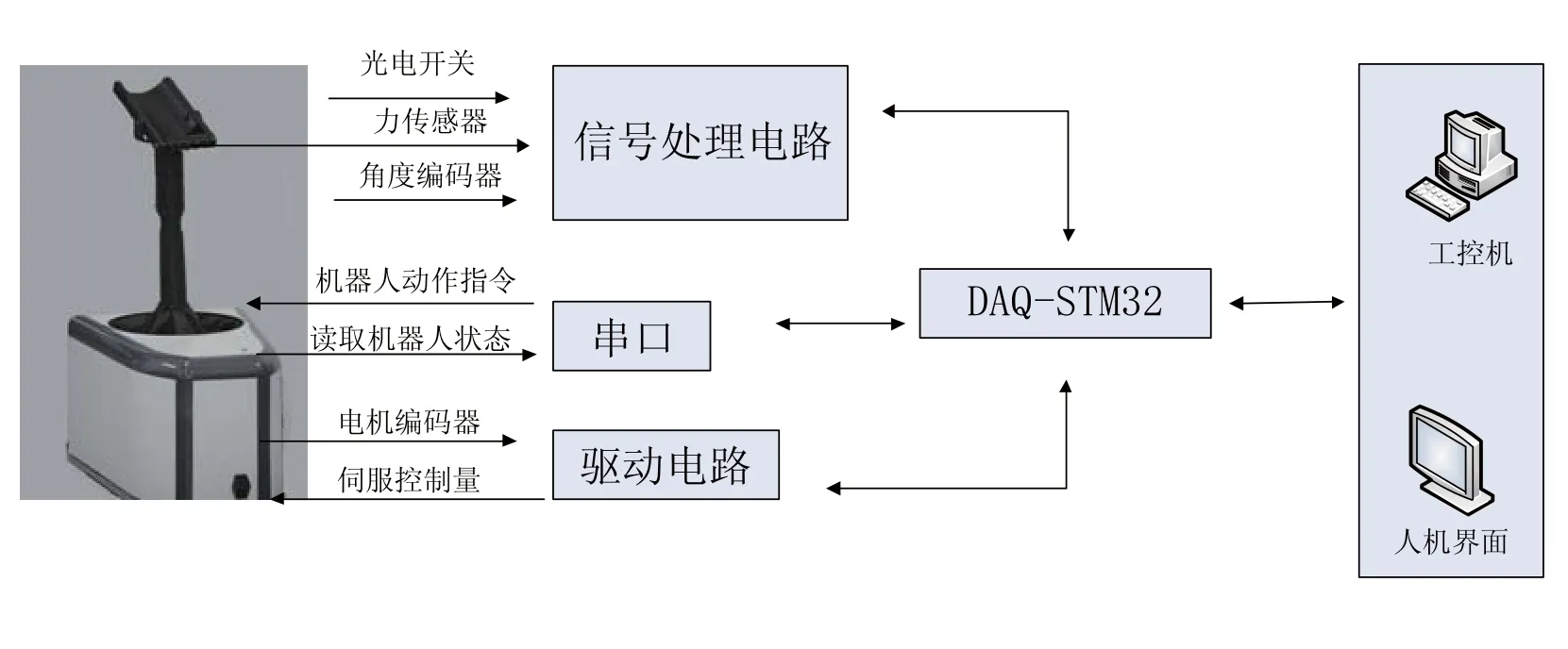
圖1 控制系統框圖
1 上肢康復機器人系統建模
1.1 上肢康復機器人
上肢康復機器人系統由上肢康復機器人機構本體、力傳感器、編碼器、驅動電路、信號處理電路以及虛擬現實場景工控機構成。
康復訓練時,患者的手放在機器人末端帶有把手的托盤上(安裝有六位力傳感器,測量患者手臂與機器人之間相互作用力),由工控機上的硬件操作平臺發出操作命令,經D/A通道傳送給電機驅動電路,驅動機器人運動;當患者手臂對機器人有力作用時,由A/D模塊把力信號傳送給控制系統進行運算,從而使患者在機器人的帶動下進行康復訓練,系統控制框圖如圖1所示。
1.2 上肢康復機器人運動學模型
上肢康復機器人運動學的求解實際上就是對康復機器人中搖桿運動的求解。搖桿結構如圖2(a)所示。為了分析搖桿機構,需獲得手柄末端的位置,并對其運動學分析。將搖桿部分結構簡圖簡化為圖2(b)幾何空間示意圖。分別設定搖桿兩側電機的軸心作為x、y、z軸,搖桿的垂直方向作為z軸,構成初始三維坐標系O1、x、y、z為基坐標。手柄末端構成末端坐標系O2、x、y、z。通過編碼器可以獲得x、y、z電機的轉角 θx,θy, θz,其中L為θz的函數。
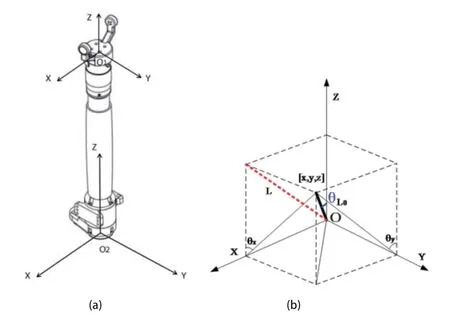
圖2 上肢康復機器人搖桿結構簡圖
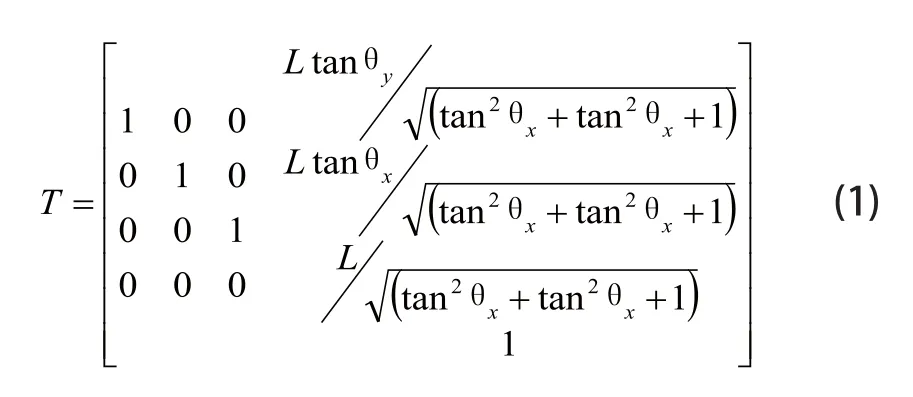
可推倒出上肢康復機器人的位姿為:
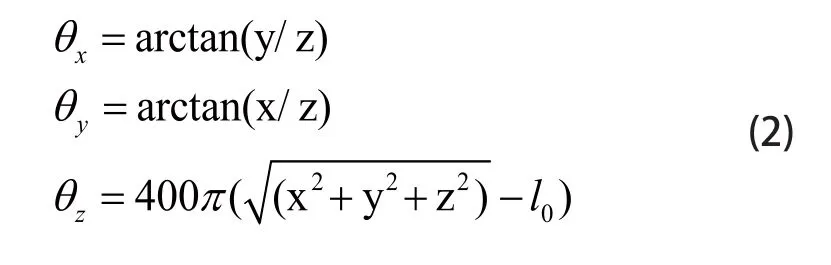
對運動學模型進行逆向求解得到逆向運動學模型:
1.3 上肢康復機器人動力學模型
本文中將空間搖桿投影到OXZ平面進行分析。搖桿在OXZ平面上投影簡圖如圖3所示。其中OB為搖桿固定桿長部分投影,長度為l0y,質量為m0。活動桿在初始位置時固定桿內部,后期通過Z軸電機從固定桿中進行伸出運動。AB為活動桿長部分投影長度為l1y,質量為m1,通過拉格朗日方程對上肢康復機器人進行求解能夠推導出x方向上有公式:

其中i0表示電機傳動比,本文中取值為1/200。
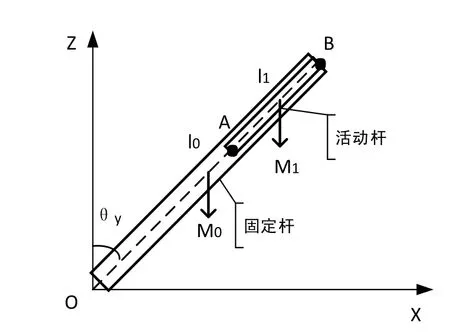
圖3 上肢康復機器人搖桿平面簡圖
2 力反饋控制策略設計
根據本文上肢康復機器人的運動學和動力學模型,可設計出經典阻抗控制策略,本文在經典控制方法中引入力反饋環節[7],搭建力反饋控制策略模型。如圖4所示。
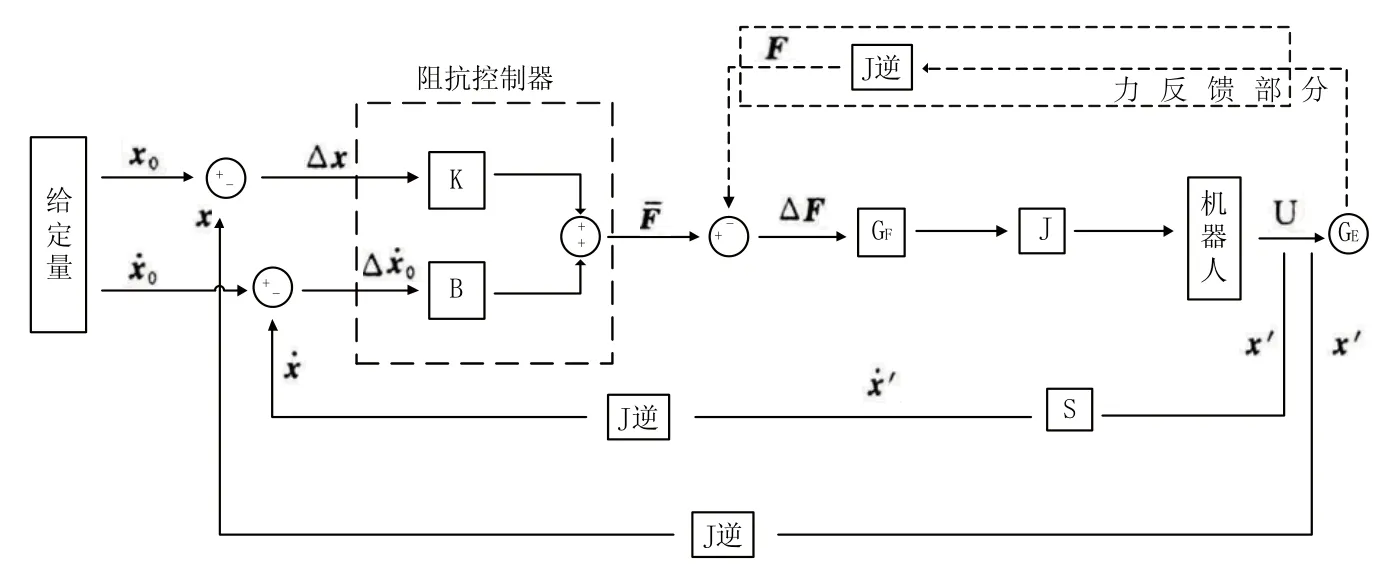
圖4 上肢康復機器人力反饋控制框圖
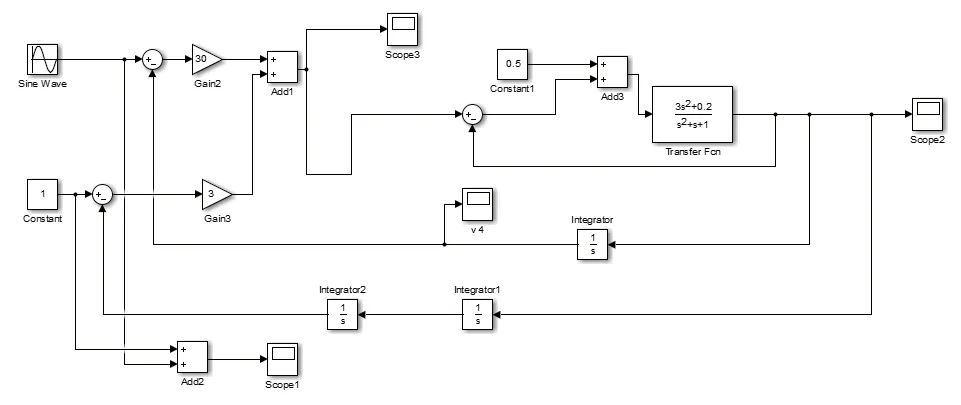
圖5 上肢康復機器人力反饋控制策略Simulink仿真圖
3 仿真實驗與結果分析
根據上肢康復機器人力反饋控制框圖構建相應的仿真框圖。對x方向動力學方程進行拉普拉斯變換能夠得到傳遞函數,其中傳遞函數:

繪制Simulink仿真圖如圖5所示。
對力反饋控制策略進行仿真。仿真結果如圖6所示。
首先驗證系統階躍響應曲線,能夠得到圖6。
系統的階躍響應曲線如圖6所示,不難看出,本文所提出的力反饋控制策略通過合適的阻尼比和自然頻率使得系統處于穩定狀態。
擬定輸入正弦波速度信號時,位移軌跡跟蹤仿真結果圖7所示。其中實線表示參考軌跡位移曲線,虛線表示實際位移曲線。從結果圖7(a)可以看出,在未加入力反饋環節時實際軌跡對參考軌跡跟蹤效果較差,在初始1s內存在一定位置的位移差。6s時達到軌跡跟蹤最大位移差。加入力反饋環節與未加入力反饋環節的速度對比圖。其中實線表示系統輸入信號,虛線表示經過系統給的輸出信號。而從結果圖7(b)可以得出,在加入力反饋環節后實際位置和參考位置誤差較小,運動性能得到明顯改善。對比兩次仿真結果,不難看出,力反饋環節對系統位移跟蹤性能有明顯提高。
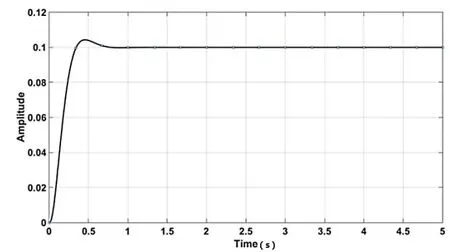
圖6 階躍響應曲線
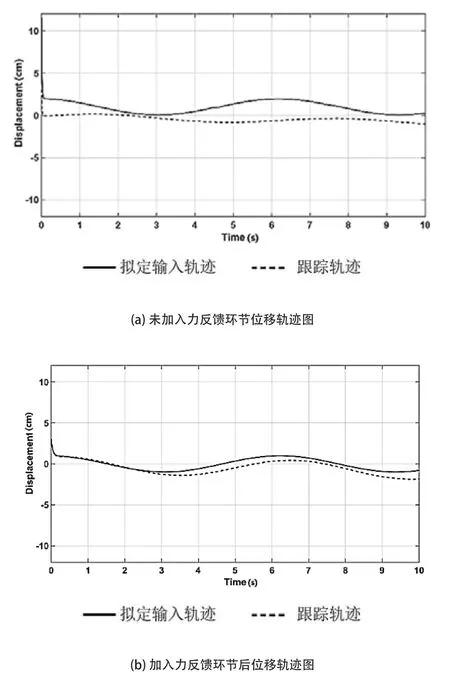
圖7 位移軌跡跟蹤圖
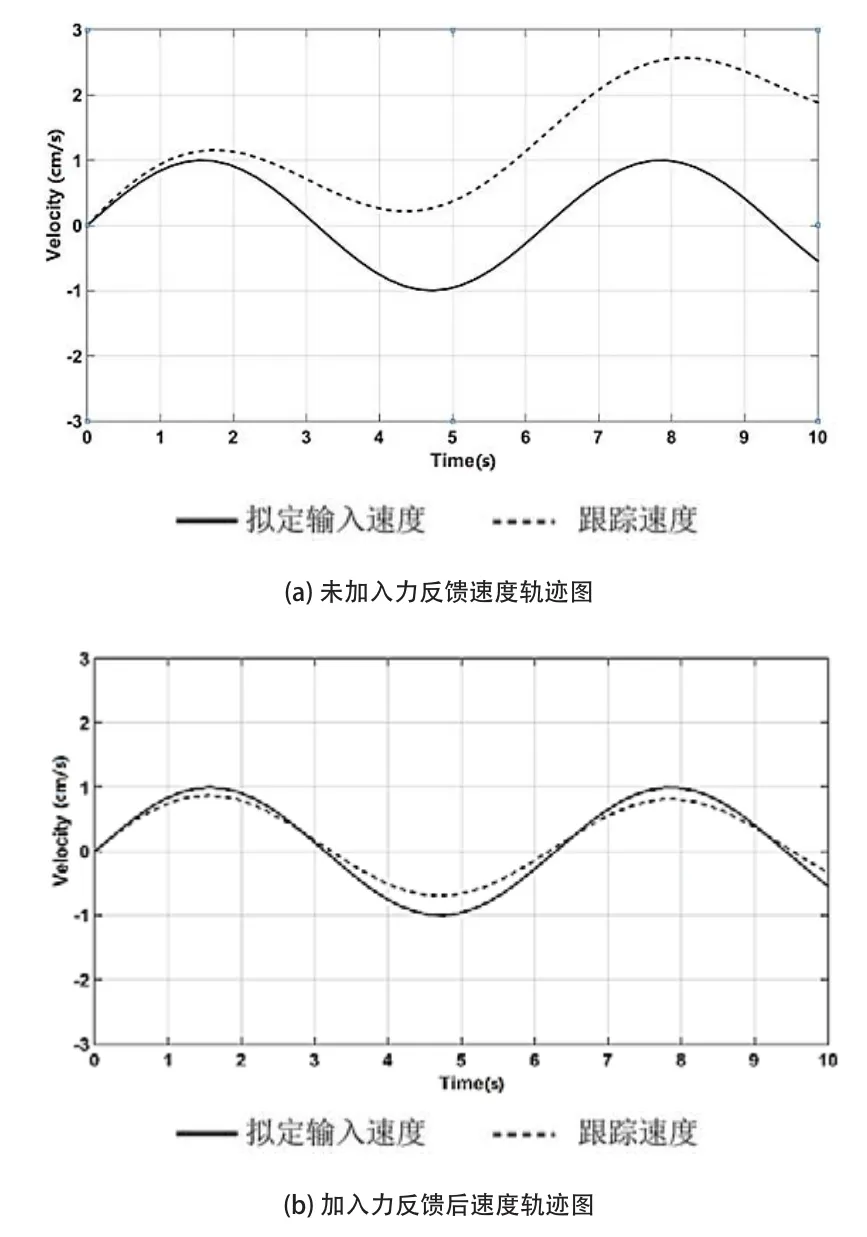
圖8 速度軌跡跟蹤圖
圖8表示未加入力反饋環節速度與加入力反饋環節速度軌跡圖。從圖8(a)可以看出,初始運動時實際速度與參考速度相差并不大,但隨著時間增大,速度跟蹤呈現發散狀態,8s到10s時速度差可以看到明顯增大,此時系統性能不好,無法準確輸出參考速度值。加入力反饋環節后,如圖8(b)所示,仿真運動過程中,實際輸出速度雖與參考速度存在些許偏差,但與圖8(a)相比已得到明顯改善。對比(a)、(b)兩圖不難看出,文中提出的力反饋控制策略在速度跟蹤效果中有明顯的改善作用。
4 結論
仿真分析驗證了力反饋控制策略的可行性,通過仿真結果分析也可以看出力反饋控制策略應用與上肢康復機器人有其顯著優勢。在控制過程中加入力反饋環節對上肢康復機器人運動性能能有明顯的改善。想要實現上肢康復機器人的力覺交互體驗感,力反饋環節是系統必不可少的控制前提。
本文進行的相關實驗研究屬于康復機器人的基本系統設計實驗研究,后期結合康復治療理論將開發相應的虛擬現實環境[8]以及完善的治療評估系統。
完善設備的機械結構和控制策略后,課題組接下來的主要工作包括:臨床實驗的驗證,增加實驗樣本。在提高機器柔順性的同時結合腦電,肌電信號,肢體姿態信息綜合評估機器人的訓練能力以及康復效果[9]。
[1] Prior,S.D.,P.R. Warner. A review of world rehabilitation robotics research. in High-Tech Help for the Handicapped[A].IEEE Colloquium on. 1990[C].IET.
[2] 張付祥,付宜利,王樹國.康復機器人研究進展[J].河北工業科技, 2005.22(2).100-105.
[3] 梁天佳,吳小平,莫明玉.上肢康復機器人訓練對偏癱患者上肢功能恢復的影響[J].中國康復醫學雜志,2012.27(3).255-256.
[4] Tang J Carignan,C Gattewar. Virtual Environment for Robotic Tele-Rehabilitation[A].IEEE International Conference on Rehabilitation Robotics[C].2005:365-370.
[5] 付宜利,李坤,潘博,等.微創手術機器人力檢測與力反饋技術研究現狀[J].機器人,2014,36(1):118-120.
[6] 胡進,侯增廣,陳翼熊,等.下肢康復機器人及其交互控制方法[J].自動化學報,2014,40(11):2379-2381.
[7] 陳明哲.機器人控制[M].北京航空航天大學出版社,50-51.
[8] 吳常鋮,宋愛國,李會軍,等.一種上肢康復訓練機器人及控制方法[J].儀器儀表學報,2014,35(5):999-1001.
[9] 張立勛,楊勇,張今瑜.等.手臂康復機器人阻抗控制實驗研究[J].哈爾濱工程大學學報,2008,29(1):69-72.
Upper-limb rehabilitation robotc modeling and force feed back control research
LI Ya-nan1,2, ZUO Guo-kun2, CUI Zhi-qin1, SHI Chang-cheng2, LIU Yong-yong2
TP13
:A
:1009-0134(2017)05-0037-04
2017-01-13
寧波市社會發展重大科技專項(2016C11021)
李雅楠(1991 -),女,河北保定人,碩士研究生,主要從事虛擬現實、力覺交互、力反饋控制方面研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
特別健康(2018年2期)2018-06-29 06:13:44
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
通信電源技術(2016年1期)2016-04-16 04:57:26
中國衛生(2014年6期)2014-11-10 02:30:50
