晶圓植球設備自動清潔機構的研究
2017-06-15 18:31:16劉勁松馮川魯
制造業自動化 2017年5期
劉勁松,馮川魯,時 威
(1.上海理工大學 機械工程學院,上海 200093;2.上海微松工業自動化有限公司,上海 201114)
晶圓植球設備自動清潔機構的研究
劉勁松1,2,馮川魯1,時 威2
(1.上海理工大學 機械工程學院,上海 200093;2.上海微松工業自動化有限公司,上海 201114)
晶圓植球設備采用了金屬模板印刷法進行植球。植球過程中,殘留在網板上的助焊劑和錫焊球不及時清理,不但會影響晶圓定位和印刷植球效果還會損傷網板和晶圓。根據印刷網板和植球網板的清潔要求,分別采用了無塵布擦拭和真空吸附的清潔方法。設計了印刷網板自動清潔機構并分析了其工作流程,設計了植球網板自動清潔機構并對其關鍵技術進行研究。自動清潔機構的設計進一步提高了晶圓植球設備的自動化水平,為實現全自動晶圓植球設備打下基礎。
晶圓植球設備;網板;清潔機構
0 引言
晶圓級封裝(Wafer Level Package,WLP),是一項先進封裝技術,形成封裝體的各工藝步驟均在未分切的完整晶圓上完成[1]。整個WLP封裝過程中,制造晶圓凸點的工藝決定了WLP封裝設備的設計方案。制造晶圓凸點工藝有三種形式:電鍍方式、印刷錫膏固化方式和植球方式[2,3],其中植球方式成本低、無污染和工藝穩定,被廣泛應用。
晶圓植球設備是WLP封裝過程中關鍵設備之一,其主要機構包括:印刷機構、植球機構、檢測機構以及上下料機構[4]。印刷機構和植球機構的核心工作平臺分別是印刷網板和植球網板。晶圓植球設備是利用攝像頭通過尋找晶圓和網板上的特征點進行對位,殘留在印刷網板上的助焊劑(Flux)如果不及時清理會覆蓋特征點,影響晶圓定位[5]。植球過程中,殘留在植球網板下面的錫焊球會增大晶圓和植球網板的間隙,影響植球效果,甚至會損傷晶圓和網板。國內封裝廠的晶圓植球設備大多處于半自動化水平,網板主要靠人工進行清潔。但是,由于手動清潔的隨機性,導致人工清潔并不可靠[6]。本文針對實現清潔機構的自動化,研究了晶圓植球設備自動清潔機構,進一步提高了晶圓植球設備的自動化水平。
1 晶圓植球設備清潔方法
金屬模板印刷法植球方式主要包括印刷和植球兩道工藝,印刷機構和植球機構都需要使用金屬模板。印刷網板的主要功能是印刷時將助焊劑準確的涂敷在晶圓的焊盤(Bump)上,而植球網板的主要功能是植球時焊錫球通過模板網孔落入晶圓焊盤上[7]。兩道工藝分別采用以下方法進行清潔。
1.1 印刷網板清潔方法
水溶性助焊劑易溶于水和酒精[8],在室溫條件下,長期暴露在空氣中的助焊劑會發生化學反應變質[9],殘留在網板上的痕跡會變得難以清洗。因此,在助焊劑印刷完成后,對印刷網板及時清洗顯得非常重要。 目前針對殘留在印刷網板上的助焊劑主要借助工業酒精和無塵布進行清潔。
印刷網板自動清潔機構要對殘留在印刷網板上的助焊劑實現自動清洗。機構設計的關鍵在于全自動的無塵布傳送系統和酒精供給系統。
1.2 植球網板清潔方法
目前植球網板的清潔方法主要有接觸式清潔方法和非接觸式清潔方法:接觸式清潔方法原理是利用黏著滾輪將錫焊球從網板上黏下,這種清潔方式需要黏著滾輪與植球網板緊密接觸并施加一定壓力;非接觸式清潔方法的原理是利用真空吸附裝置將錫焊球從植球網板清除并回收。
非接觸式清潔方法與接觸式清潔方法相比,有以下優點:
1)避免了清潔裝置與植球網板直接接觸,減小了植球網板的變形。
2)可以通過調整結構參數調節吸引力大小。
3)錫焊球通過吸管進入回收裝置,避免落入機床,省去了二次清潔的麻煩。
鑒于非接觸式清潔方式以上優點,植球網板自動清潔機構采取了非接觸式清潔方法。機構的設計關鍵在于可調節吸附力的實現。
2 印刷網板自動清潔機構
印刷網板自動清潔機構主要由無塵布傳送系統、酒精供給系統、擦拭系統和傳動系統等四部分組成。無塵布傳送系統由供布裝置、收卷裝置、增量式編碼器和對射激光傳感器等組成;酒精供給系統主要由酒精供給裝置和酒精噴射裝置組成;擦拭系統主要由擦拭裝置和夾持裝置組成;傳動系統由一級傳動裝置和二級傳動裝置組成。
如圖1所示,無塵布傳送系統完成了無塵布的供給和傳送量檢測。無塵布的傳送軌跡為:收卷裝置由伺服電機驅動,將無塵布依次經供布機構、夾持裝置和擦拭裝置收卷到滾輪。增量式編碼器記錄無塵布的收卷量,對射激光傳感器檢測無塵布是否已經用完。在無塵布傳送的過程中,酒精噴射裝置將酒精噴到無塵布,噴射量可由PLC控制酒精供給裝置的閥門調節。無塵布傳送完畢后,由夾持裝置將無塵布夾住,Z軸氣缸將擦拭裝置向上推到工作位置,開始擦拭網板。擦拭網板動作由橫向擺動和縱向傳動兩個動作組成,橫向擺動動作由X軸電機完成,縱向擺動傳動動作由Y軸方向的傳動裝置完成。一級傳動裝置采用絲杠傳動,由Y軸電機驅動;二級傳動裝置采用氣缸軌道傳動,由Y軸氣缸驅動。
如圖2所示,印刷網板清潔機構的工作過程包括有酒精擦拭和無酒精擦拭兩個階段:第一個階段,傳送無塵布的同時需要噴射酒精將無塵布浸濕,無塵布傳送完成后開始擦拭動作,完成對整個網面的擦拭后,傳動裝置到達返程點,進入第二階段;第二階段也就是返程階段,傳送無塵布時不需要噴射酒精,再次完成對整個網面的擦拭,傳動裝置到達復位原點,網板清洗結束。在傳送無塵布過程中,激光對射傳感器會檢測無塵布是否用完,如果無塵布已經用完PLC會停止清潔機構動作并發出警報。
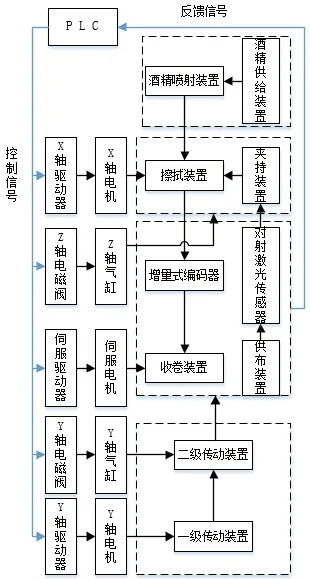
圖1 印刷網板自動清潔機構示意圖
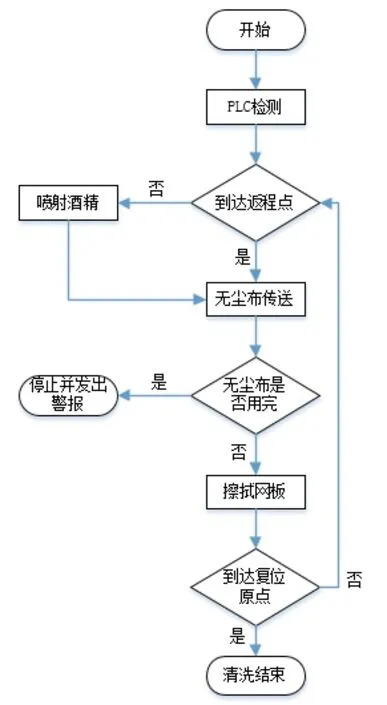
圖2 印刷網板自動清潔機構工作流程
3 植球網板自動清潔機構
植球網板自動清潔機構主要由:吸附系統、傳動系統和檢測系統組成。吸附系統由吸附裝置、動力裝置和回收裝置組成;傳動系統由一級傳動裝置和二級傳動裝置組成;檢測系統主要由激光位移傳感器組成。
如圖3所示,吸附系統完成了對錫焊球的吸附和回收。動力裝置產生空氣負壓為吸附裝置提供吸附力,回收裝置對吸附的錫焊球進行回收。為了對植球網板進行全面清潔,吸附裝置在工作過程中會左右擺動,擺動動作由X軸電機完成。傳動系統采用了兩級傳動的設計。激光位移傳感器會檢測吸附裝置與植球網板之間的距離,并將反饋信號傳送給PLC進行處理。PLC會通過控制Z軸伺服電機對吸附裝置和植球網板之間的距離進行調節。
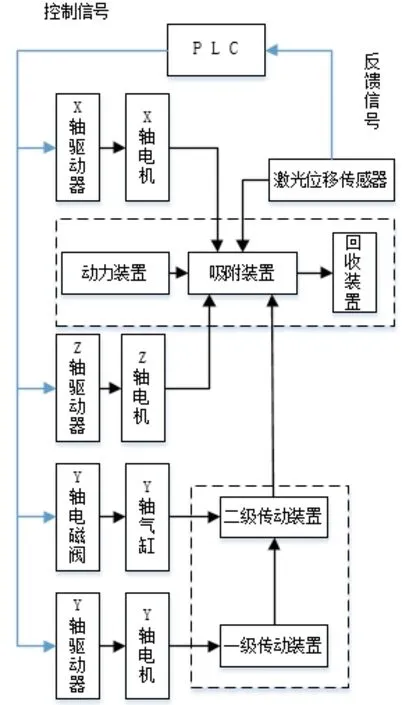
圖3 植球網板自動清潔機構示意圖
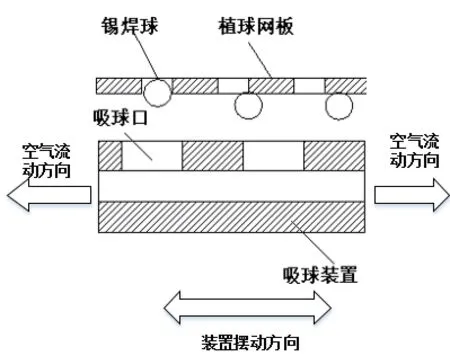
圖4 吸附裝置工作示意圖
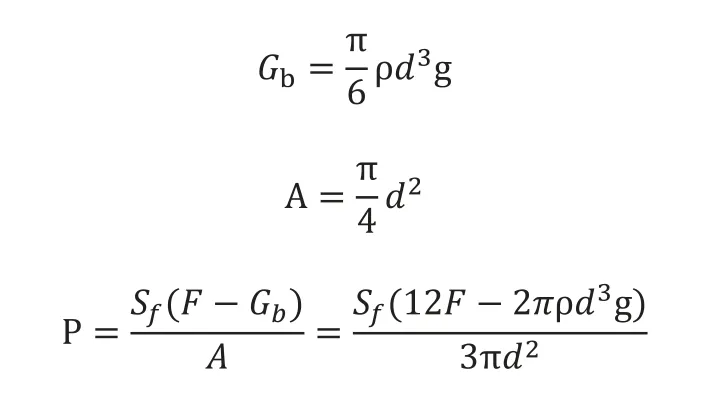
吸附裝置工作示意圖如圖4所示,錫焊球附著在網板上并無規律,附著力產生的主要原因是植球刷在植球過程中產生的靜電力。設附著力為F,錫焊球直徑為d,錫焊球密度為 ,錫焊球自身重力為Gb,錫焊球最大橫截面積為A,所需吸球口的真空度為P,安全系數為Sf,重力加速度為g,則:
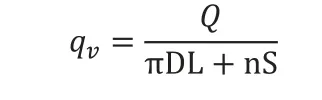
將吸附系統中的流動空氣簡化為理想流體模型[10],設Q為每個吸球口單位時間內產生的流量,D為吸球口直徑,S為每個植球孔的面積,n為平均每個吸球口對應的植球孔的數量,L為吸球裝置平面與植球網板之間的距離,qv為吸球口空氣的流速,0為空氣密度,h距地面高度,C為常量,則:
由伯努利方程得:
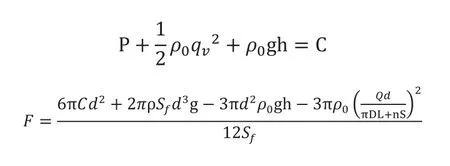
通過以上分析,在額定功率下Q為常量,可通過調整吸球裝置與植球網板之間的距離L,調整吸附力。激光位移傳感器能夠精確非接觸測量被測物體的位置、位移等變化[11],可以借助激光位移傳感器進行距離檢測,然后通過工藝調整達到清潔效果。
4 結論
本文針對晶圓植球設備中印刷網板和植球網板的清潔要求,分別研究了印刷網板自動清潔機構和植球網板自動清潔機構。通過在自主研發的晶圓級微球植球機上實驗, 取得了良好的清潔效果。晶圓植球設備自動清潔機構進一步提高了晶圓植球設備的自動化水平,為實現晶圓植球生產線全自動化打下基礎。
[1] 中國電子學會電子制造與封裝技術分會,電子封裝技術叢書編輯委員會.電子封裝工藝設備[M].北京:化學工業出版社,2011:157-162.
【】【】
[2] 劉勁松,郭儉.3D芯片封裝晶圓植球裝備關鍵技術研究[J].中國電子科學研究院學報,2013,06:573-577.
[3] 云振新.圓片級封裝技術及其應用[J].電子與封裝,2004,01:19-23.
[4] 劉勁松,郭儉.BGA/CSP封裝技術的研究[J].哈爾濱工業大學學報,2003,35(5):602-604.
[5] Randy Leon Peckham, Joseph A.Perault. Cleaning apparatus in a stencil printer:US, 6626106 B2[P].2003-9-30.
[6] Gunter Erdman. Stencil wiping device:US, 6491204 B1[P].2002-12-10.
[7] 劉勁松,時威,張金志.晶圓級WLP封裝植球機關鍵技術研究及應用[J].機械制造自動化,2015,35(6):28-31.
[8] 曾士良.助焊劑及其選用[J].電子測量技術,1992,(4):49-51.
[9] 楊兵,丁榮崢,唐桃扣.CBGA植球在線質量檢測與控制技術[J].電子與封裝,2009,9(3):6-10.
[10] 林建忠.流體力學(第2版)[M].北京:清華大學出版社,2013.
[11] 陳新春,閆乃晴,齊偉,王燦.基于Visual Basic與RS232串行通信的數據采集系統[J].智能制造,2016,(8):37-40.
Research on automatic cleaning unit in wafer-level package ball mounter
LIU Jin-song1,2, FENG Chuan-lu1, SHI Wei2
TP23
:A
:1009-0134(2017)05-0102-03
2017-01-14
上海市科學技術委員會項目(16DZ1121003)
劉勁松(1968 -),男,哈爾濱人,教授,博士,研究方向為高端半導體芯片制造裝備、工業機器人應用、系統集成和機電一體化裝備設計與制造技術。
