基于視覺處理的Tripod機器人的幾何定位與顏色識別
2017-06-19 19:31:28胡新強石紅瑞
無線互聯科技 2017年8期
胡新強,石紅瑞,王 強
(東華大學 信息科學與技術學院,上海 201620)
基于視覺處理的Tripod機器人的幾何定位與顏色識別
胡新強,石紅瑞,王 強
(東華大學 信息科學與技術學院,上海 201620)
文章旨在基于貝加萊Tripod機器人工作平臺,進行機器人視覺的研究,給機器人增添不可或缺的眼睛。通過捕捉平臺上圖像傳給計算機進行處理,進行高斯濾波、灰度化、二值化、霍夫變換等一系列操作實現幾何體的幾何定位與顏色識別。實驗結果表明,該視覺系統實現了Tripod機器人對于物體的精準定位和顏色辨識。
圖像處理;機器人視覺;幾何定位
在工業生產中,經常需要將物體拾起,重新擺放到新的位置,這一工作動作單一,并且重復性大,交給人類來做,容易疲勞,也很難保證快速而準確的完成[1]。但是如果交給機器人來處理的話,將會輕松地完成這種工作,其準確性和快速性是人類所無法企及的。為此,需要采用合理算法,精準的控制機器人來幫助我們完成這項工作,提高企業的生產效率[2]。在現代的工業自動化生產過程中,機器視覺正逐漸成為一種提高生產效率和保證產品質量的關鍵技術[3]。
本次研究使用Tripod機器人及其工作平臺,整套系統利用安裝的攝像頭,對工作平臺進行拍照。獲取平臺上的圖像,對其進行顏色和形狀的識別,標定其坐標位置,為最后控制機器人將每個幾何體拾起并放到正確的位置做好基本準備。
1 圖像的采集
手機攝像頭通過懶人支架安裝在機器人的側上方,這是找到的一個比較好的位置切入點,不會受到機器人運動的干擾,而且支架可以將手機很好地固定,可以實時跟蹤平臺情況。Tripod機器人平臺如圖1所示。
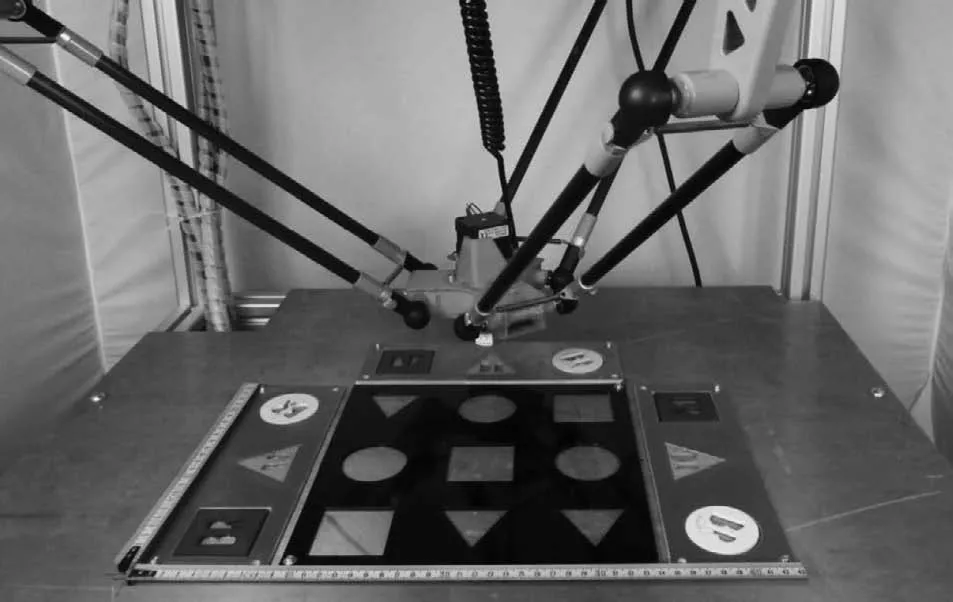
圖1 Tripod機器人和操作平臺
利用安裝在平臺側上方的手機直接對平臺進行拍照,然后將獲得的數字圖像傳送給自己的PC,以便進行后期的處理。獲得的原圖像如圖2所示。經過透視變換后圖像如圖3所示。
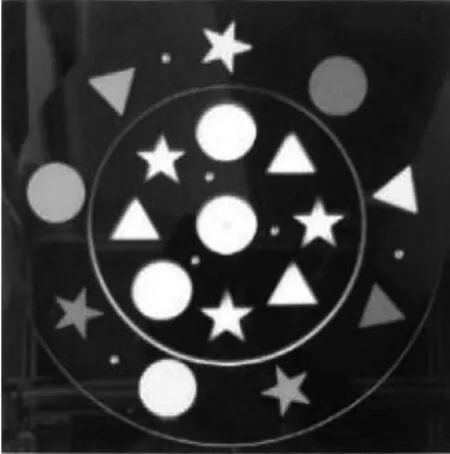
圖3 透視變換
2 圖像處理
2.1 圖像濾波
為了得到比較高質量的圖像,可以將采集到的原始圖像進行先進行濾波操作。
此次實驗中,我們采用高斯濾波的方式。它屬于線性平均濾波的一種,采用的方式是對整幅圖像進行加權平均,然后獲取像素值。高斯濾波的具體操作過程:用一個模板掃描圖像中的每一個像素,把模板確定的鄰域內像素的加權平均值去代替模板中像素點的值。選用不同的算子進行高斯濾波,發現當算子為5×5效果比較好,得到圖像如圖4所示。
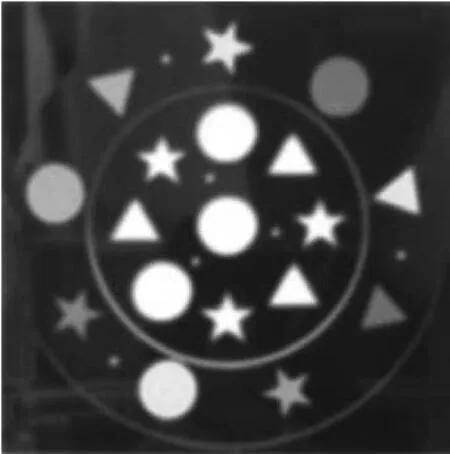
圖4 高斯濾波
2.2 圖像的灰度化與二值化
定義在RGB空間的彩色圖像,每一個像素點都是由R,G,B 3個分量共同決定的,每個分量在計算機中所占的位數又決定了圖像的深度,也就是每個像素點所占的字節數。對得到的RGB圖像進行灰度化的過程,其實就是對圖像的3個分量R,G,B進行加權平均得到最終的灰度值的過程。得到的灰度化圖像如圖5所示。
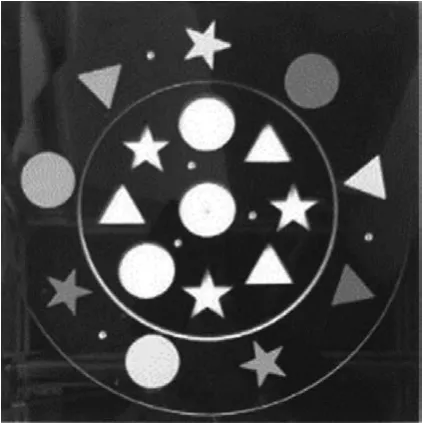
圖5 灰度化圖像
將得到的灰度化圖像進行二值化,使圖像只呈現黑白兩種模式,采用自適應二值化方法得到圖像如圖6所示。
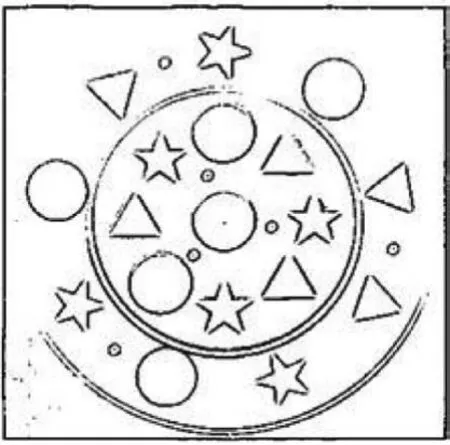
圖6 二值化圖像
3 圖形的顏色識別
經過透視變換后的圖像,幾何體顯示藍色、黃色和橙色3種顏色,可以憑借肉眼很好地分別它們的顏色和形狀。但是對于計算機處理來說,卻遠非如此。通過查表可知,3種顏色的RGB值分別為:橙色(255,165,0)、橙色(255,165,0)、藍色(0,0,255)。經過閾值化發現黃色圖像和橙色圖像對顏色識別有干擾。選取不同閾值,進行比較:
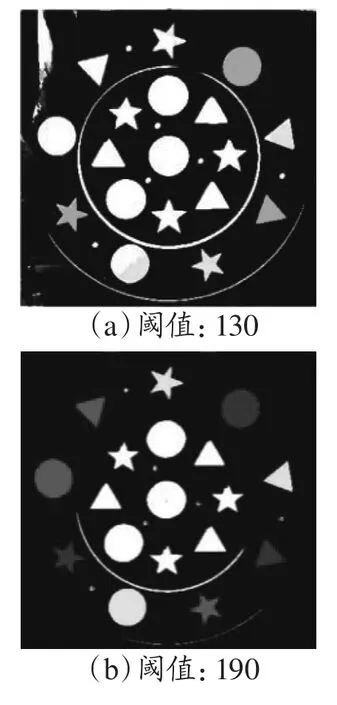
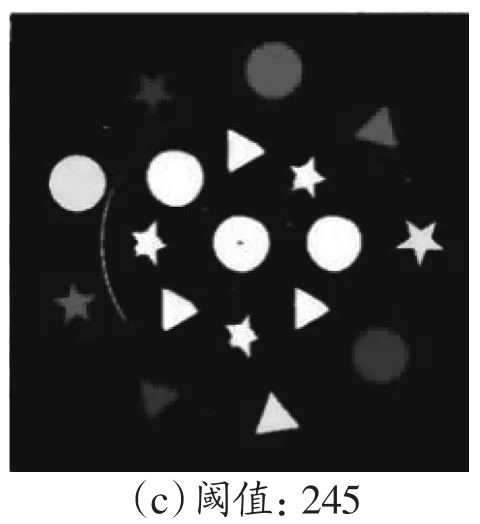
圖7 閾值化圖像
通過觀察上面幾幅圖像,不難看出,閾值不同時圖形所示顏色區別很大,多次選取閾值進行比較后發現,當閾值選取為190時可以得到比較清晰的圖像,而且顏色對比也比較鮮明,因此后續在此圖像上進行處理,先經過這種變換,如圖8所示。
圖8 顏色轉換
紅色、黃色和藍色3種顏色的RGB值容易被檢測,檢測出來后只需與變換前對應即可,黃色和藍色不便,檢測出來的紅色即表示原圖橙色。紅、黃、藍3色的RGB值分別為:(255,0,0),(0,255,0),(0,0,255)。
4 幾何體的形狀檢測
霍夫變換技術是數字圖像處理中的特征提取技術,通過在特定參數空間中計算累加結果的局部最大值得到一個滿足某種具體形狀的集合作為霍夫變換結果。霍夫變換包括圓檢測和直線檢兩種方法,這種方法進行檢測的好處是對噪聲不是很敏感。提取需要的圖形,進行ROI提取,獲得的圖形如圖9所示。
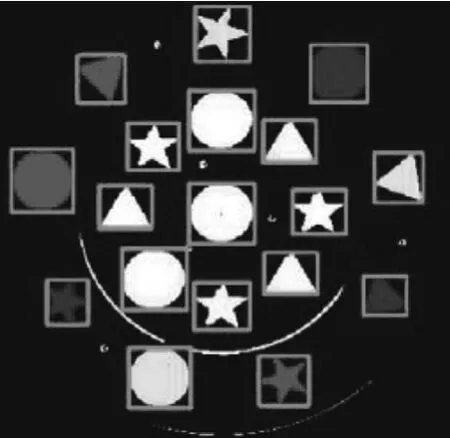
圖9 閾值分割
通過對像素值的平均計算,得出了中心點的坐標,分辨出了各圖形的顏色,其結果如圖10所示。
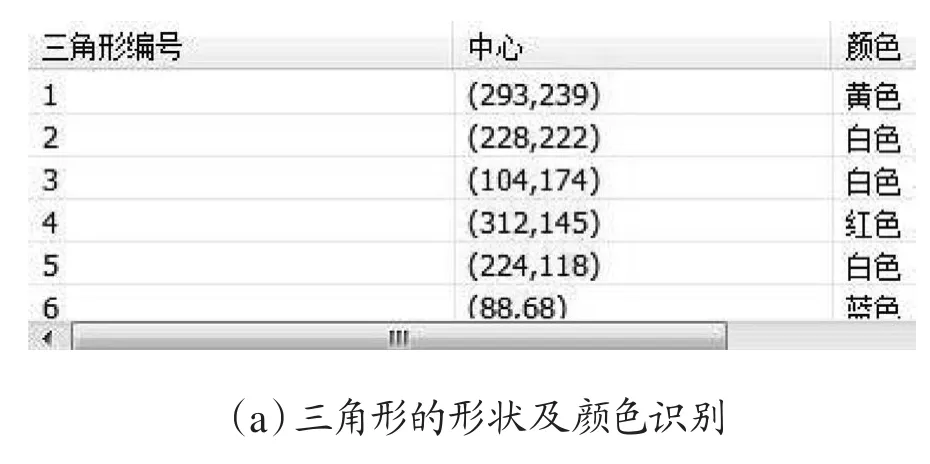
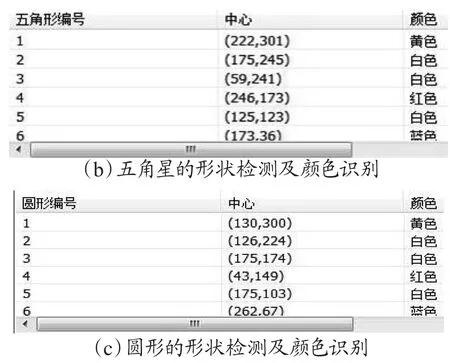
圖10 幾何定位與顏色識別
通過計算像素值,得出了幾何體各個中心點的坐標,同時也檢測出各個圖形的顏色。經過這種方法,就鎖定了Tripod機器人平臺上各物體的位置,方便進行下一步的抓取工作,促進工業化生產。
5 結語
本文針對Tripod機器人的平臺,完成幾何體的顏色識別和定位。通過手機捕捉實驗平臺上的圖像,對捕捉到的圖像進一步處理,得出高斯濾波、灰度化、二值化后的圖像。進行ROI提取,識別他們的顏色,求出幾何中心點的坐標。
實驗結果表明,此機器人視覺處理系統可用于精準定位,對Tripod機器人的推廣使用具有深遠的影響。
Geometric localization and color recognition of tripod robot based on vision processing
Hu Xinqiang, Shi Hongrui, Wang Qiang
(Ιnformation Science and Technology School of Donghua University, Shanghai 201620, China)
Based on B & R Tripod robot work platform, the paper aims to make a research of the robot vision and add indispensable eyes to robots. Through the processing of images from the platform to the computer, the geometric positioning and color recognition of geometry are realized by a series of actions such as Gaussian fi ltering, gray scale, binary and Hough transform. The experimental results show that such a visual system has finished the precise positioning and color identification of Tripod robot.
image processing; robot vision; geolocation
胡新強(1992— ),男,安徽安慶,碩士;研究方向:圖像處理,智能控制。