深水卡爪連接器防松機構研究及試驗分析
2017-06-19 19:00:47運飛宏王立權劉軍劉通王仁華賈鵬
哈爾濱工程大學學報 2017年5期
運飛宏,王立權,劉軍,劉通,王仁華,賈鵬
(哈爾濱工程大學 機電工程學院,黑龍江 哈爾濱 150001)
?
深水卡爪連接器防松機構研究及試驗分析
運飛宏,王立權,劉軍,劉通,王仁華,賈鵬
(哈爾濱工程大學 機電工程學院,黑龍江 哈爾濱 150001)
針對深水卡爪連接器在工作時受到外界環境干擾造成的松動問題,本文設計了新型非螺紋防松機構。根據深水卡爪連接器密封結構特點,對防松機構受力特性進行分析,找出影響鎖緊效率的主要因素,確定了卡爪連接器防松機構2個鎖緊配合的角度。對卡爪連接器密封結構力學進行受力分析,得出卡爪連接器對拉力載荷的承載能力,計算出防松機構增益系數及防松力。通過運動性能試驗,驗證了防松壓塊及解鎖壓塊與防松滑塊之間的運動關系;通過等效受載試驗,驗證了防松機構在外載下具有良好的防松性能。研制的防松機構已經在我國南海水下320 m進行了示范應用,有重要的理論意義和推廣價值。
深水卡爪連接器;防松機構;非螺紋;鎖緊效率;增益系數;解鎖;防松性能;等效試驗
由于陸地能源日漸枯竭,深海將會成為石油天然氣等傳統能源形式的主要供應區域[1]。深水卡爪連接器是海洋油氣資源開采系統中廣泛應用的設備之一,深水卡爪連接器工作在超過1 500 m的深海,不僅受到結構載荷的作用,還受到波浪、洋流等對跨接管沖擊而造成的外載荷影響[2],因此良好的防松性能是其工作安全可靠的重要保證。
目前,國外一些石油工程公司的卡爪連接器防松技術已經成熟,例如FMC、OilStates以及Cameron等公司,而我國在這方面的研究較少。文獻[3-4]是Cameron公司發明的卡爪連接器,文獻[5]是Cooper Industries公司發明的卡爪連接器,這些卡爪連接器采用的防松結構均為螺紋連接,需要人在卡爪連接器的組裝過程中進行螺紋擰緊的操作,從而實現防松的功能;由于人工操作只限于淺水,因此這種防松方式僅限于近海管道連接。文獻[6-7]是分別為Hughes Tool和Vetco Gray公司發明的卡爪連接器,采用的是液壓防松,這種防松方式需要液壓缸長期工作在海底,造價高、可靠性低。李志剛等發明了一種螺紋傳動防松機構,這種防松方式結構簡單,但需要無人遙控潛水器(remote operated vehicle,ROV)在水下與操作接口精確對準進行操作;由于深水能見度低,不方便ROV觀測,實現精確對準需要較長時間,增加了深水卡爪連接器安裝難度,安裝效率較低[8]。
針對深水卡爪連接器密封原理,本文設計了一種新型非螺紋傳動防松機構,并對其受力特性進行分析,得出影響其鎖緊效率的關鍵參數;通過卡爪連接器可承受的最大拉力載荷驗證防松機構的鎖緊性能,并通過試驗對其進行運動性能及防松性能的驗證。
1 深水卡爪連接器構成
如圖1所示,深水卡爪連接器由底座下接頭和卡爪上接頭組成。底座下接頭結構簡單,主要作用是將下法蘭固定在水下生產設施上。卡爪上接頭結構較為復雜,主要包含上法蘭、驅動環、密封圈、卡爪等密封核心部件,以及防松機構[9-11]。
圖1 深水卡爪連接器Fig.1 Deepwater collet connector
進行水下作業時,深水卡爪連接器安裝工具攜帶卡爪上接頭下放,與底座下接頭完成對接后,安裝工具對驅動環進行加載,驅動環向下運動帶動卡爪張開,卡爪抱緊上、下法蘭后,安裝工具上的防松液壓缸對2個防松機構進行加載,加載完成后安裝工具撤離,深水卡爪連接器完成安裝。深水卡爪連接器的密封核心部件由上、下法蘭與密封圈組成,上下法蘭壓緊密封圈實現密封。依靠驅動環內壁與卡爪背部摩擦自鎖以及防松機構鎖緊力保證卡爪連接器在外載荷下的可靠性[12]。
2 卡爪連接器防松原理
2.1 卡爪連接器防松機構設計
傳統螺紋式防松機構依靠擰緊螺紋傳動機構實現防松,設計的新型防松機構依靠由防松壓塊、防松滑塊和防松柱組成的兩道自鎖結構配合實現防松。如圖1、2所示,防松機構箱體安裝在卡爪接頭頂蓋上,防松柱固定在驅動環上。當防松壓塊被防松液壓缸活塞桿加載時,連接防松壓塊和解鎖壓塊的鏈條便將解鎖壓塊提起,防松滑塊兩側的滑動導向螺栓帽起到導向的作用,這時防松滑塊便在防松壓塊的推動下向前運動,直到防松壓塊運動到底端,使防松滑塊便防松柱壓緊。設計的防松滑塊與箱體連接的方式是滑動副,為了減小機構的體積,防松滑塊設計的十分緊湊,為了安裝與定位,其滑動導向裝置采用螺栓帽代替滑塊。
圖2 防松機構結構Fig.2 Structure of loose-proof mechanism
2.2 防松機構受力特性分析與自鎖配合設計
深水卡爪連接器由驅動環施加在卡爪背部錐面的壓力間接實現密封,驅動環僅需提供很小的摩擦力就能使密封結構保持密封狀態,只有在受到干擾力時驅動環有向上運動趨勢時,防松機構產生鎖緊力。其受力狀態如圖3、4所示。
圖3 有干擾力下自鎖配合I受力分析Fig.3 Mechanical analysis of self-locking cooperation I under exciting force
圖4 有干擾力下自鎖配合II受力分析Fig.4 Mechanical analysis of self-locking cooperation II under exciting force
卡爪連接器受干擾力情況下,防松壓塊具有相對于防松滑塊沿自鎖斜面I斜向上的速度趨勢。防松壓塊受到來自防松機構箱體鎖緊摩擦力F1、防松機構箱體支反力Q1、摩擦力f21和支反力N1,其中f21和N1可合成防松滑塊的作用力R1,自鎖配合I摩擦角為φ1,斜面傾斜角度為λ1。假設防松壓塊斜向上速度為勻速運動,F1與R1力學關系為
F1=R1sin(λ1-φ1)
(1)
圖4為自鎖配合II受力分析圖,防松滑塊具有相對于防松柱沿自鎖斜面II斜向下的速度趨勢。防松滑塊受到來自防松壓塊的作用力F2、防松機構
箱體支反力Q2以及來自防松柱的作用力R2,R2由摩擦力f32和支反力N2合成,自鎖配合II摩擦角為φ2,斜面傾斜角度為λ2。假設防松壓塊斜向上速度為勻速運動,F2與R2力學關系為
(2)
式中:λ1為自鎖配合I斜面角度;λ2為自鎖配合II斜面角度;φ1為自鎖配合I摩擦角,8°30′;φ2為自鎖配合II摩擦角,8°30′。
F2與R1互為作用力反作用力,可得出F1與R2關系為
F1=R2sin(λ2-φ2)tan(λ1-φ1)
(3)
若無摩擦力作用,則理想鎖緊力為
F0=R2sinλ2tanλ1
(4)
因此防松機構解鎖效率為
(5)
只有在η1≤0時機構能夠完成自鎖。
圖5為機構進行鎖緊動作時自鎖配合I與自鎖配合II受力分析圖。與上述分析同理,可以得出鎖緊傳動效率:
(6)
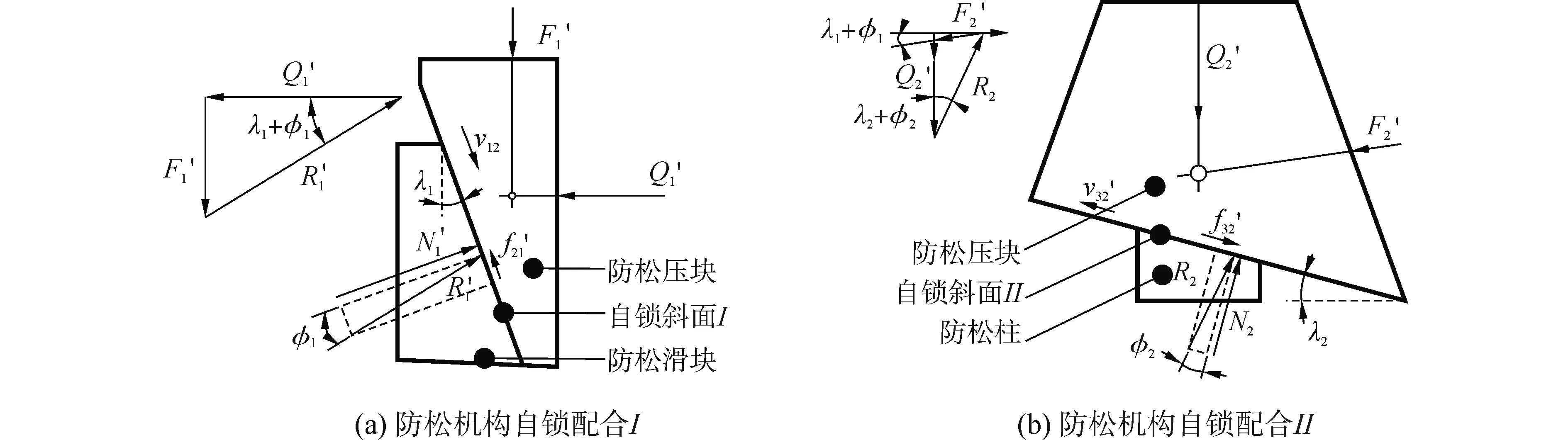
圖5 鎖緊時防松機構受力分析Fig.5 Mechanical analysis of the loose-proof mechanism in the locking state
防松機構不僅需要保證在受干擾力的情況下自鎖即η1≤0,還需要確保在進行鎖緊動作時傳動效率η2≥0[13-15]。因防松機構結構限制,引入結構約束條件λ1+λ2≤50°。通過綜合以上3個限制條件,可以得出λ1與λ2的取值范圍如圖6所示。根據卡爪連接器結構特性,選取λ1=20°,λ2=3°。
設計的防松滑塊兩側有λ1=20°傾角,方便防松壓塊及解鎖壓塊運動,同時不會發生自鎖;防松滑塊的底端是λ2=3°傾角,既可以保證防松滑塊順利的壓到防松柱上,也可以保證在沒有來自解鎖塊的作用時自鎖;若驅動環因外界干擾的作用向防松機構施加作用力,由于防松滑塊兩側的導向螺栓帽是卡在防松箱體里的,因此不僅不會發生移動,反而會壓緊防松柱,起到防松作用。
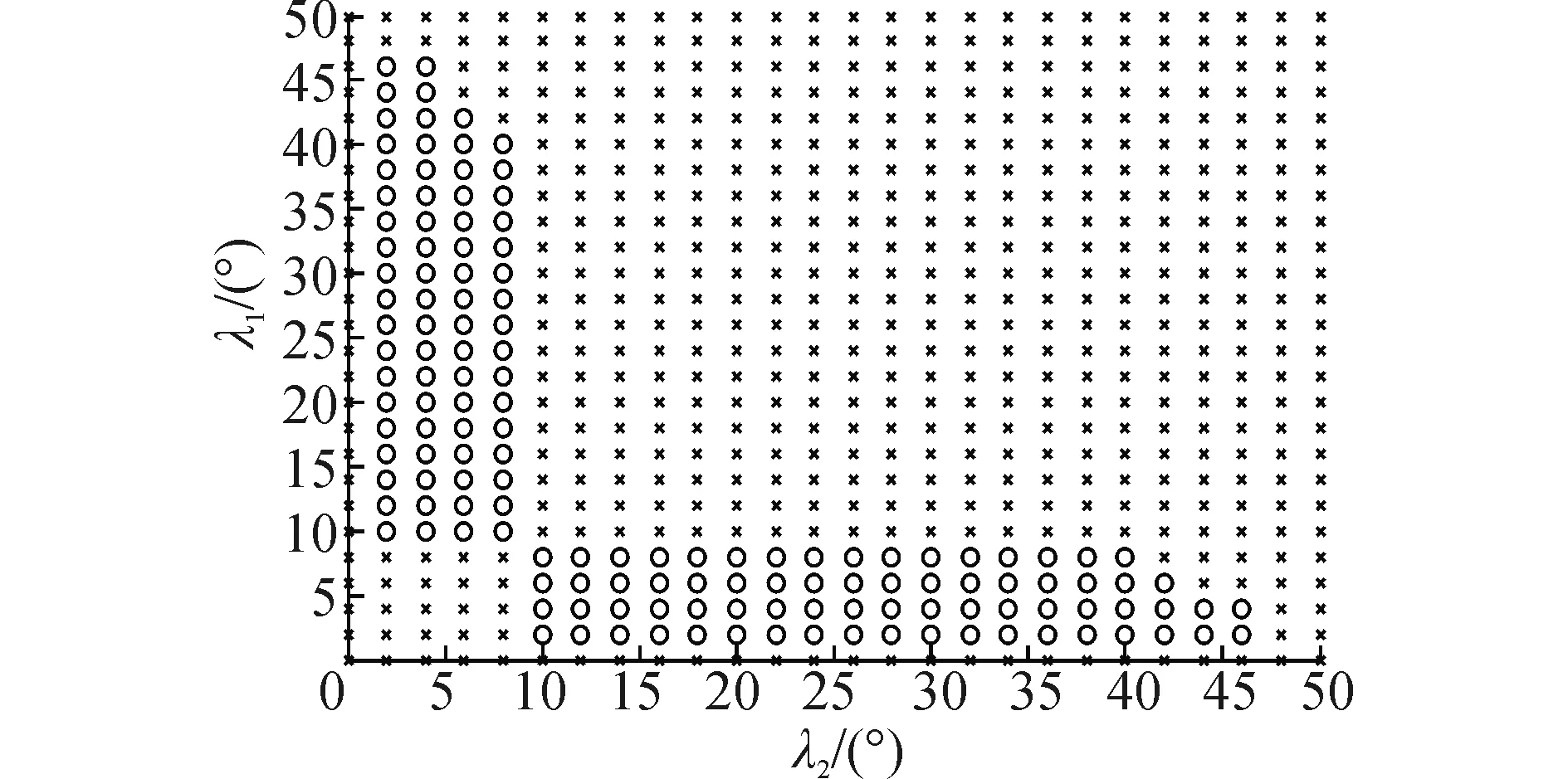
圖6 λ1、λ2取值范圍Fig.6 Value ranges of λ1 and λ2
3 防松機構性能分析
跨接管因內部油氣沖擊,對卡爪連接器產生各種載荷,其中拉力載荷會使卡爪連接器驅動環具有向上解鎖的趨勢,此時防松機構起到主要的防松作用。但當此拉力載荷過大時,卡爪連接器密封結構會直接產生斷裂破壞,密封結構失效。因此為驗證防松機構鎖緊性能,需判斷卡爪連接器所能承受最大拉力載荷。
3.1 卡爪連接器承受最大拉力分析

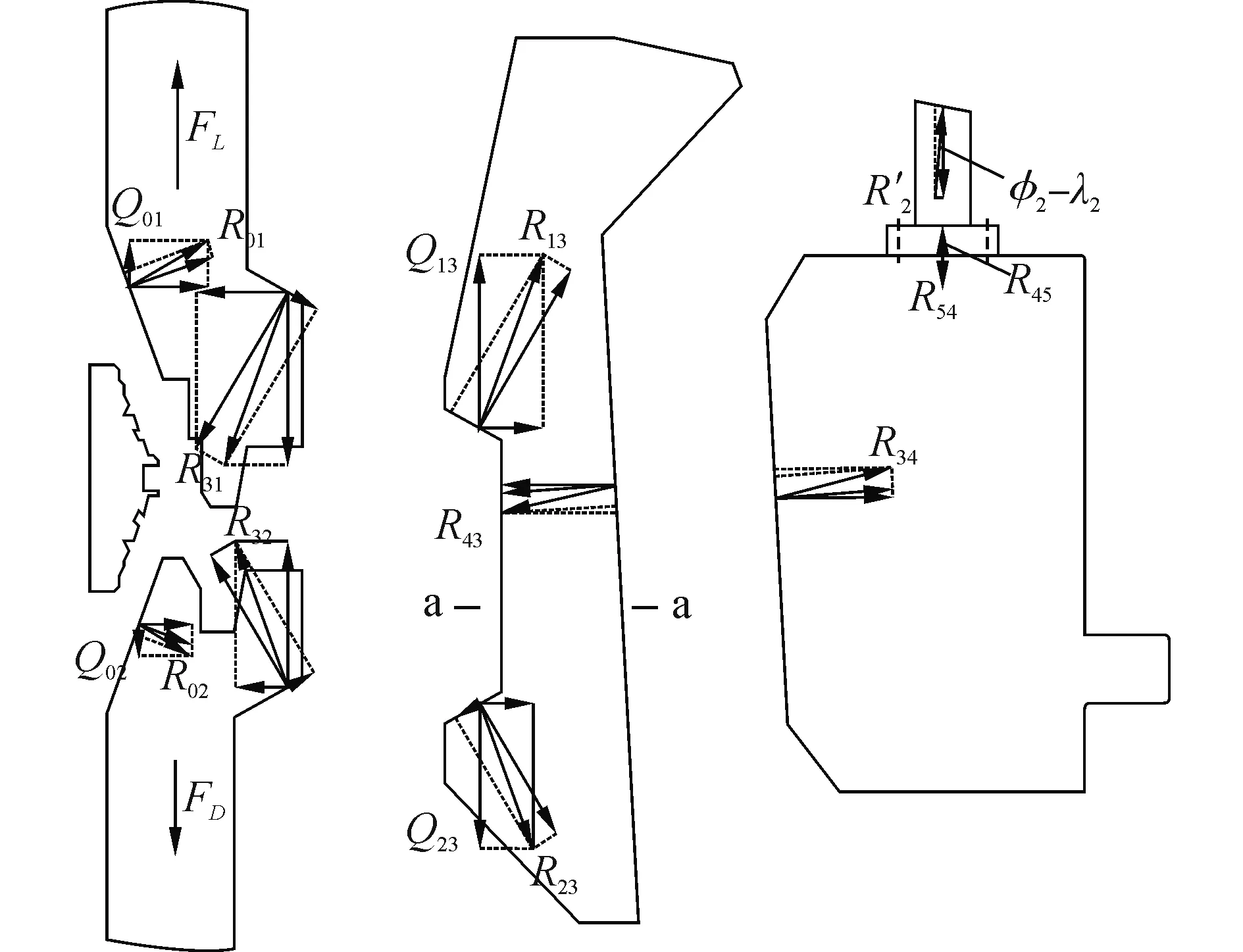
圖7 卡爪連接器密封部件受力分析Fig.7 Mechanical analysis of the sealing structure of the collet connector
由圖7看出,拉力載荷經過上下法蘭的傳導直接作用在卡爪上,卡爪的強度直接決定連接器的最大承拉載荷。如圖8所示,對于a-a截面,在工作狀態下,由于外部拉力與密封軸向力Q01的共同作用,使得a-a環向截面的受力狀態呈現拉伸——彎曲復合狀態。根據疊加原理,a-a環向截面的當量應力應滿足:
σoa=σma+σa≤[σz]t
(7)
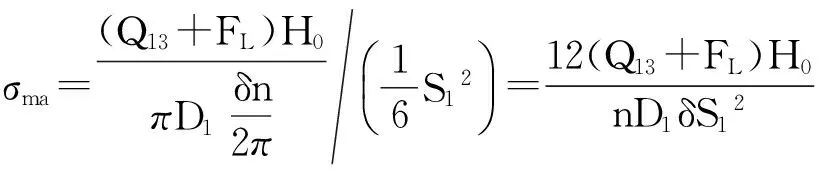
(8)
式中:H0為力臂;D1為中性面直徑;δ為單個卡爪旋轉角度;n為周向卡爪數量,n=12;S1為厚度。
a-a環向截面的拉應力σa為[16]
(9)
式中:D0為外直徑,mm;D2為內直徑,mm。
通過計算a-a截面的所允許的當量應力,計算出卡爪連接器所允許的最大拉力載荷FL=238.7kN。
圖8 卡爪危險截面Fig.8 Dangerous section of the collet
3.2 防松機構性能分析
根據前期研究知,卡爪連接器密封圈所需最小軸向預緊力Q0=39.7 kN[17]。將圖7各部件受力分析簡化,得到圖9。由圖9(a)上法蘭所受各力關系可得
(10)
(11)
Q01=R01sin(α+ρ)
(12)
Q13=R13sin(β-ρ)
(13)
式中:α為法蘭密封面錐角,20°;β為法蘭錐頸傾角,30°;γ為卡爪背部傾角,3°;ρ為摩擦角,8°30′。
由圖9(b)卡爪所受各力之間關系可得
(14)
(15)
Q23=R23sin(β-ρ)
(16)
由圖9(c)下法蘭所受各力之間關系可得
(17)
Q02=R02sin(α+ρ)
(18)
將計算出的最大拉力載荷FL=238.7kN代入式(10)~(18),可求得Q01=49.88kN,Q02=40.54kN,R34=R43=215.68kN。可見上法蘭及下法蘭對密封圈的軸向預緊力Q01與Q02均大于卡爪連接器密封圈所需最小軸向預緊力Q0=39.7kN,證明在極限拉力載荷作用下,密封并未失效。同時,
如圖7所示,防松柱的豎直方向的力的平衡方程為
φ2-λ2)
(19)
由式(3)、(10)、(15)和(19)可以推導出最大拉力載荷與防松所需摩擦力的比值,即防松機構增益系數K:
[sin(2β-2ρ)sin(γ+ρ)tan(λ1-φ1)·
(20)
經過計算得出K=790.81,F1=0.31kN。說明當卡爪連接器在工作狀態承受最大拉力載荷時,防松壓塊僅需提供很小的鎖緊摩擦力就可以阻止驅動環的向上運動趨勢,保證卡爪連接器的密封可靠性。
圖9 密封元件間的受力關系簡圖Fig.9 Force relation figure between sealing components
4 卡爪連接器防松試驗
4.1 防松機構運動測試試驗
如圖10所示,由專用的防松機構測試裝置對其進行運動測試試驗。防松液壓缸及鎖緊液壓缸內置位移傳感器,可測量防松壓塊、解鎖壓塊的運動位移;測試裝置內置接觸式位移傳感器,可測量防松滑塊的運動位移。防松及解鎖試驗所得數據如圖11所示。從圖中可以看出,防松壓塊最大運動距離約為41.21 mm,防松滑塊的位移與其基本成正比,初始由于接觸不均勻的問題略有微小波動,防松滑塊位移為5 mm以后,防松壓塊勻速移動。由于試驗銜接比較緊湊,在解鎖試驗中,解鎖壓塊與防松滑塊的初始接觸并無其他因素干擾,因此隨著解鎖壓塊的運動,防松滑塊在整個解鎖過程中均為勻速運動,并無波動,其最大位移也為41.21 mm。同時,從圖中還可以看出,防松與解鎖的運動過程是完全對稱的,驗證了防松機構設計的正確性。
圖10 防松機構運動測試裝置Fig.10 Motion performance test equipment of the loose-proof mechanism
4.2 防松機構等效受載試驗
第3節中分析出,防松機構在卡爪連接器承受拉力時起到重要的防松作用。卡爪連接器可承受的最大拉力為238.7 kN。如圖12所示,使用卡爪連接器安裝工具的加載環對卡爪上接頭施加拉力,可等效于跨接管對連接器施加力。
通過調節系統工作壓力從而調整加載環作用在卡爪上接頭的力。試驗從0 kN拉力開始加載,每次增加238.7 kN;每次施加拉力后,利用液壓泵對卡爪連接器內部腔體注入高壓油,直至連接器的額定工作壓強34.5 MPa,保壓1 h,記錄保壓后的壓力值。同時,根據ISO 21329中對于內壓測試的要求,需要測試34.5 MPa的1.5倍(51.75 MPa)[18],試驗數據均記錄在表1中。
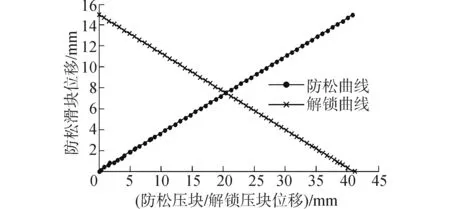
圖11 防松及解鎖試驗位移曲線Fig.11 Displacement curves of locking and unlocking experiment
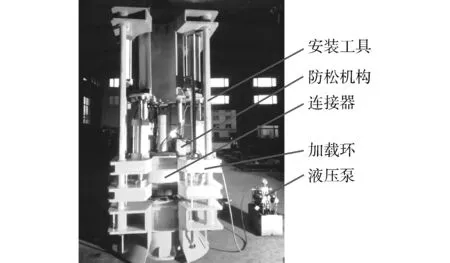
圖12 防松機構等效受載試驗裝置Fig.12 Equipment of the experiment of equivalent load of the loose-proof mechanism
Table 1 Data of the experiment of equivalent load of the loose-proof mechanism
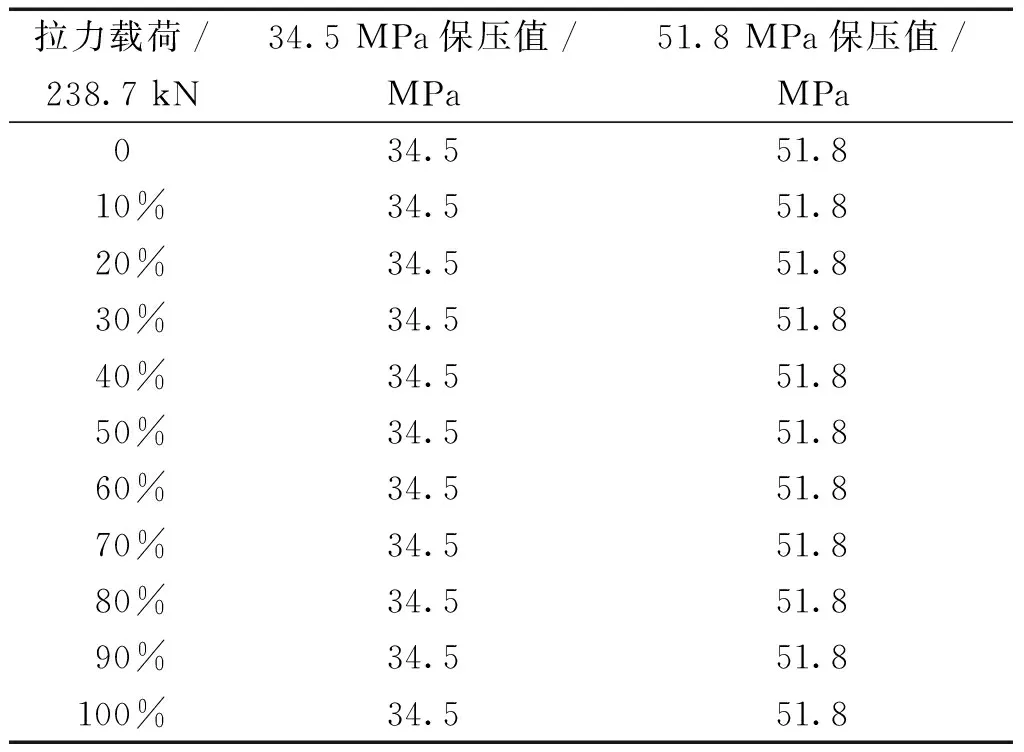
拉力載荷/238.7kN34.5MPa保壓值/MPa51.8MPa保壓值/MPa034.551.810%34.551.820%34.551.830%34.551.840%34.551.850%34.551.860%34.551.870%34.551.880%34.551.890%34.551.8100%34.551.8
由于51.75 MPa在測量表中不容易讀出,因此使用51.8 MPa代替。如表1所示,34.5 MPa及51.8 MPa內壓時,從最大拉力的10%開始至100%,均無壓降,符合驗收準則。
5 結論
1)通過對防松機構的受力特性進行分析,得到能夠抵抗干擾力的2組自鎖配合面的角度取值范圍,并根據卡爪連接器結構特性選取防松機構2個鎖緊配合的角度:λ1=20°、λ2=3°。
2)對處于工作狀態和拉力載荷作用下的卡爪連接器進行了受力分析,得到各密封部件間力的傳導關系,并計算出卡爪連接器可承受的最大拉力載荷:FL=238.7 kN;以最大拉力載荷為干擾,推導出防松機構的增益系數:K=790.81,最大拉力所需的防松力:F1=0.31 kN。
3)通過卡爪連接器的防松機構運動性能試驗,測試出防松壓塊及解鎖壓塊的最大運動距離約為41.21 mm,且兩種壓塊的位移與防松滑塊的位移成正比,同時,防松壓塊與解鎖壓塊的運動過程完全對稱;通過防松機構等效受載試驗,驗證了防松機構在卡爪連接器可承受的最大拉力238.7 kN下,有良好的防松性能,可以保證卡爪連接器在34.5 MPa及51.8 MPa時均有著良好的密封性能。
研制的深水卡爪連接器防松機構已經在我國南海320 m水深進行了示范應用,并取得了成功。由于其具有良好的防松性能,也可以廣泛應用于其他類型的水下連接器防松機構。
[1]劉少軍,劉暢,戴瑜.深海采礦裝備研發的現狀與進展[J].機械工程學報, 2014, 50(02): 8-18.
LIU Shaojun, LIU Chang, DAI Yu. Status and progress on researches and developmentsof deep ocean mining equipments[J]. Journal of mechanical engineering, 2014, 50(02): 8-18.
[2]OMIYA Y, SAWA T. Thermal stress analysis and the sealing performance evaluation of bolted flange connection at elevated temperature[C]// Pressure Vessels and Piping Conference of the American-Society-of-Mechanical-Engineers. Prague, New York, 2009: 397-408.
[3]RONALD P, THOMAS S. Collet connector: USA, 4693497[P]. Sep. 15, 1987.
[4]JIMMIE G. Flowline connector: USA, 4411317[P]. Oct. 25, 1983.
[5]ROBERT W, DAVID A, ARTHUR C. Collet actuated ball and socket connector: USA, 4477105[P]. Oct. 16, 1984.
[6]BRAIN S. Collet type connector: USA, 4984830[P]. Jan. 15, 1991.
[7]CHARLES J, EDWARD T. Hydraulic collet-type connector: USA, 4708376[P]. Nov. 24, 1987.
[8]李志剛,姜瑛,王立權,等.水下連接器的防松機構:中國, 2013103177846[P]. 2015.02.11.
LI Zhigang, JIANG Ying, WANG Liquan, et al. Loose-proof structure of the subsea connector: China, 2013103177846[P]. 2015.02.11.
[9]時黎霞,王立權.深水液壓卡爪式法蘭連接器的設計[J]. 長春理工大學學報:自然科學版, 2009, 32(4): 595-598.
SHI Lixia, WANG Liquan. Design on deepwater hydraulic collet connector[J]. Journal of Changchun University of Science and Technology:Natural Science Edition, 2009, 32(4): 595-598.
[10]李志剛,運飛宏,姜瑛,等.水下連接器密封性能分析及實驗研究[J].哈爾濱工程大學學報,2015,36(3): 389-393.
LI Zhigang, YUN Feihong, JIANG Ying, et al. Analysis and experimental study of subsea connector′s seal performance[J]. Journal of Harbin Engineering University, 2015, 36(3): 389-393.
[11]ZHU Yanshun, LUO Xiaolan, DUAN Menglan, et al. Installation technology of deepwater vertical collet connector[C]//Natural Resources And Sustainable Development II. Stafa-Zurich, 2012: 1465-1470.
[12]彭飛,段夢蘭,范嘉堃,等.深水連接器鎖緊機構的設計及仿真[J]. 機械設計與制造, 2014, (01): 37-39.
PENG Fei, DUAN Menglan, FAN Jiakun, et al. Design and simulation of the locking mechanism for deep-water connector[J]. Machinery design & manufacture, 2014, (01): 37-39.
[13]嚴宏志,楊兵,胡魁賢,等.不同摩擦條件對強制連續約束型離合器工作性能的影響[J].機械工程學報,2010,46(17): 86-92.
YAN Hongzhi, YANG Bing, HU Kuixian, et al. Working performance analysis of positive-continuous-engagement type clutch in different friction conditions[J]. Journal of mechanical engineering, 2010, 46(17): 86-92.
[14]劉厚云,趙望,陳超,等.高壓巡線機器人夾持機構研制[J].儀器儀表學報,2014,35(6): 29-44.
LIU Houyun, ZHAO Wang, CHEN Chao, et al. Design of the gripper for power transmission lines inspection robot[J]. Chinese journal of scientific instrument, 2014, 35(6): 29-44.
[15]劉強,房建成,韓邦成.磁懸浮飛輪鎖緊保護技術研究與發展現狀[J].光學精密工程,2014,22(09): 2465-2475.
LIU Qiang, FANG Jiancheng, HAN Bangcheng. Research and development status of locking protection technologies for magnetic bearing flywheels[J]. Optics and precision engineering, 2014, 22(09): 2465-2475.
[16]中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委員會.GB 150.3-2011,壓力容器[S].中國:中華人民共和國國家質量監督檢驗檢疫總局,中國國家標準化管理委員會, 2011.
General Administration of Quality Supervision, Inspection and Quarantine of the People‘s Republic of China and Standardization Administration of the People′s Republic of China. GB 150.3-2011, Pressure vessels[S]. China: General Administration of Quality Supervision, Inspection and Quarantine of the People‘s Republic of China and Standardization Administration of the People′s Republic of China, 2011.
[17]趙勇.深水卡爪連接器密封結構特性及其性能試驗研究[D].哈爾濱:哈爾濱工程大學,2015: 31-33.
ZHAO Yong. Characteristics and experimental research on performance of the seal structure of deepwater collet connector[D]. Harbin: Harbin Engineering University, 2015: 31-33.
[18]International organization for standardization. ISO 21329: 2004, Petroleum and natural gas industries—Pipeline transportation systems—Test procedures for mechanical connectors[S]. Switzerland: ISO copyright office, 2004.
本文引用格式:
運飛宏,王立權,劉軍,等.深水卡爪連接器防松機構研究及試驗分析[J]. 哈爾濱工程大學學報, 2017, 38(5): 771-777.
YUN Feihong, WANG Liquan, LIU Jun, et al.Research and experiment analysis on the loose-proof mechanism of the deepwater collet connector[J]. Journal of Harbin Engineering University, 2017, 38(5): 771-777.
Research and experiment analysis on the loose-proof mechanism of the deepwater collet connector
YUN Feihong, WANG Liquan, LIU Jun, LIU Tong, WANG Renhua, JIA Peng
(College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
A new type of non-thread locking mechanism was designed to resist the loosening that occurs when external forces act on the deep-water collet connector. Due to the characteristics of the sealed structure of the deep-water collet connector, mechanical characteristics of the locking mechanism were analyzed; the main factors influencing the efficiency of locking were found, and two locking matching angles of the locking mechanism were confirmed. Based on the mechanical analysis for the sealed structure of the deep-water collet connector, the tension bearing capacity of the connector was attained. In addition, the gain coefficient and the locking force of the mechanism were calculated. The kinematic relations between the locking block, unlocking block, and the locking sliding block were verified by an experiment on motion performance. By the experiment of equivalent load, the excellent locking performance of the loose-proof mechanism under the external applied load was validated. The locking mechanism was verified 320 m below the water surface in the South China Sea, which has important theoretical significance and popularization value.
deep-water collet connector; locking mechanism; non-thread; locking efficiency; gain coefficient; locking performance; equivalent test
2016-05-16.
日期:2017-04-26.
國家自然科學基金項目(51279042);國家自然科學基金青年科學基金項目(51305088).
運飛宏(1988-), 女,博士研究生; 王立權(1957-), 男, 教授,博士生導師.
運飛宏,E-mail: yfh88818@163.com.
10.11990/jheu.201605052
TE94
A
1006-7043(2017)05-0771-07
網絡出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170426.1047.032.html
