從設計角度談無人機表演安全
2017-06-19 09:14:45胡寶棋
演藝科技 2017年5期
胡寶棋


【摘 要】 綜合考慮無人機演出安全系統架構中的各種因素,利用矩陣分析的方法,從設計的角度,分析無人機表演中可 能出現的事件或事故,提出無人機表演中的風險預判、安全控制以及規范化應用的方法和措施。
【關鍵詞】 無人機;安全系統;地理區域;嚴重等級;風險分析;風險控制
文章編號: 10.3969/j.issn.1674-8239.2017.05.011
【Abstract】This paper introduces 35 items of possible failure in design view of UAV show using matrix by safety layers, geographic zones and severity levels in the safety system. It has a certain guiding significance for the risk prediction and safety control in the performance of the UAV, and the standardized application of this new thing.
【Key Words】Unmanned Aviation Vehicles (UAV); security system; geographic zones; severity level; risk analysis; risk control
1 概述
目前無人機(Unmanned Aerial Vehicle)技術發展很快,大規模集群應用的情況越來越廣泛,例如航拍、送貨、機場、港口、大型集會、觀禮慶典、軍事等,無人機表演已經開始出現在越來越多的活動場合。近期,在重慶萬達城,101架無人機表演在嘉陵江畔的夜空中畫下精美的3D圖案(圖1)。英特爾公司在德國舉辦的無人機燈光音樂會(圖2),繪寫下精美的文字,同時也開創了無人機演出的先河。
無人機表演最重要的一點是能夠安全運行操作,航空主管部門已針對無人機的運行推出了一系列措施。安全問題不容妥協,因此,安全應作為驅動因素,成為設計的一部分。硬件、軟件、美學、程序、資源、運輸、培訓、維修等均應納入安全評估范圍。
2 無人機演出安全系統架構
2.1 安全系統
(1)投資保護系統(IPS),包含兩個層級(L1、L2)。
L1:可自動檢測故障并以緊急迫降形式發出適當動作指令的非認證軟件系統。
L2:為飛行指揮官提供硬件和/或軟件按鈕,使其能指揮無人機演出上的無人機單獨或集體停機,并緊急迫降或關閉所有發動機的人工操作監管系統。所有指令的通信均通過地面站和非認證的無線電和/或無線網絡信道發出。
(2)人類與環境保護系統(HPS),包含一個層級(L3)。
L3:可通過無線電控制使無人機演出上的所有無人機均緊急停機(終極開關)的人工監管系統。心跳站(地面站的組成部分)和機載端均采用認證軟件進行緊急停機。保活信息通過無線網絡和無線電廣播渠道,從心跳站發送至無人機。終極開關推上時,心跳系統的電源就會被切斷,造成保活信息中斷,導致無人機機載緊急停機系統切斷發動機驅動的啟動信號,從而使發動機立即停止運轉,并使無人機演出的所有無人機墜落。
需強調的是,人類與環境保護系統僅為備份方案,只有當投資保護系統在極罕見的情況下失效時方可采用,而投資保護系統只有在多個獨立故障同時發生時才可能失效。
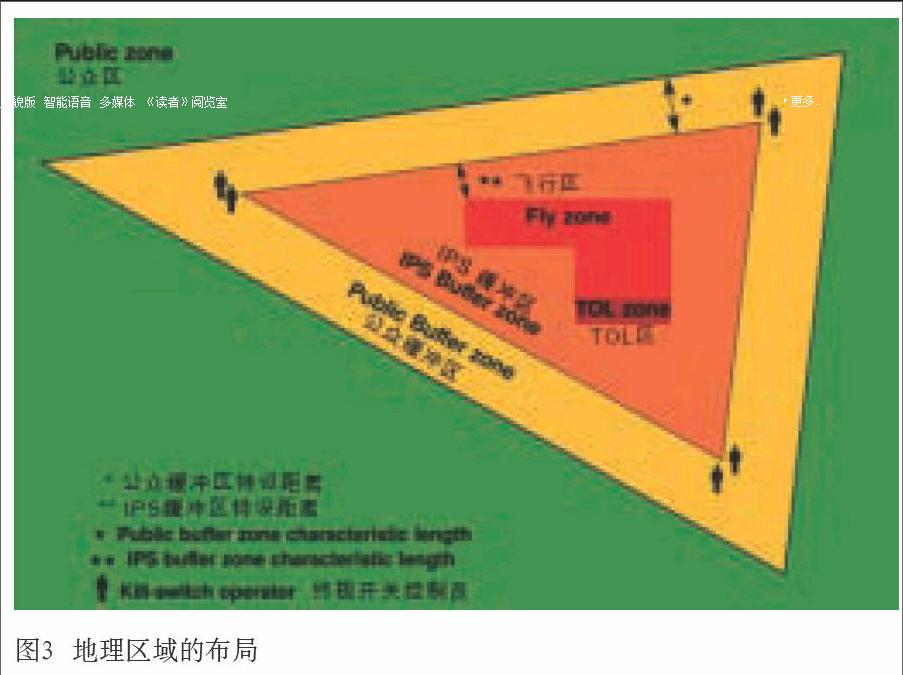
2.2 地理區域
為明確安全措施,對靜態地理區域作出以下界定。
(1)飛行區:唯一容許無人機飛行的區域。本區域由水平邊界和高度限制組成,而水平邊界則由一組直線構成。
(2)投資保護系統緩沖區:飛行區周圍的第一個區域。雖然無人機不得在本區域內飛行,但是無法嚴格保證無人機遵守該安全規定。如檢測到無人機進入本區域,無人機控制器會立即關閉其發動機。投資保護系統的目的在于將無人機控制在本區域和飛行區的組合內。
投資保護系統緩沖區特征長度:飛行區與公共緩沖區之間的最短距離。
(3)公共緩沖區:飛行區周圍的第二個區域。雖然無人機不得在本區域內飛行,但是無法嚴格保證無人機遵守該安全規定。投資保護系統的目的在于防止無人機進入本區域。如檢測到無人機進入本區域,終極開關操作員會推上終極開關,使所有無人機立即墜落。投資保護系統緩沖區的每條外部邊界線均應由兩名終極開關操作員實施監控。
公共緩沖區特征長度:公共區與投資保護系統緩沖區之間的最短距離。本區域具有最短特征長度,應時刻遵守。其最小值依彈道測試而定。
(4)公共區:除飛行區、投資保護系統緩沖區和公共緩沖區以外的區域。無人機不得在本區域內飛行,由終極開關操作員通過操作確保該安全規定得以嚴格遵守。
(5)起降區:無人機演出的無人機在飛行區內起飛和降落的位置。
圖3展示了地理區域的一般布局,具體依無人機演出的實際情況而定。
2.3 嚴重等級
首先界定與風險嚴重等級直接相關的事件和事故(摘自996/2010號 歐盟條例)。
事件指的是除事故以外,與飛行器的操作有關,且影響或可能影響操作安全的事情。
事故指的是與飛行器的操作有關并發生在飛行器準備起飛至飛行器結束飛行且主推進系統關閉期間的事情,其中包括以下情況。
(1)某人因以下原因發生致命或嚴重傷害:直接接觸飛行器的任意部位,包括從飛行器上分離出來的部件;或直接暴露在噴氣中(螺旋槳的噪聲或氣流),自然原因、自己或他人造成的傷害除外。
(2)飛行器發生損壞或結構性故障,從而對其結構強度、性能或飛行特性產生不利影響,且通常需要進行大規模維修或更換受損元件;或飛行器失蹤或完全失聯。
嚴重等級可作如下界定。
① 低嚴重性
N1:所有無人機均可飛行。
N2:并非所有無人機均可飛行(拒絕或無法起飛)。
② 中等嚴重性(事件)
I1:在需運行定位系統標記位置方可抵達下一個疏散出口點時,無人機通過位置控制,沿疏散軌跡實施疏散降落。
I2:無人機通過水平位置控制,實施即時緊急降落,而垂直速度控制需運行定位系統位置。
I3:無人機通過水平速度控制,實施即時緊急降落,而垂直速度控制需運行定位系統速度。
I4:無人機通過姿態控制,實施緊急降落,而垂直速度控制需運行慣性測量單元和氣壓表。
I5:無人機實施非標行為,且未采取疏散或應急措施。
③ 高嚴重性(事故)
A0:無人機在投資保護系統緩沖區內飛行或著陸時損壞。
A1:無人機離開投資保護系統緩沖區,且終極開關已推上。
A2:無人機離開投資保護系統緩沖區,但終極開關未推上。
A3:無人機造成致命或嚴重的人身傷害。
如無人機仍遵守規定的界線,但行為不穩定,則可能使所有事件等級惡化。在風險分析中,如預計會發生不穩定行為,則該事件會加注符號“u”,例如“I2u”表示無人機通過不穩定的水平位置控制,實施緊急降落。
3 無人機演出風險分析
本風險分析涉及以下故障。
(1)源自無人機演出系統功能架構的功能硬件組成部分(螺旋槳、電池、處理器、天線、通信設備傳感器等)。
(2)機載發電機微控制器內的發動機驅動軟件。
(3)機載可編程邏輯內的位置控制軟件。
(4)機載處理器內的插補通信軟件。
(5)地面站系統。
除另有說明,本風險分析假設了以下基本原則。
(1)每次只存在一種故障模式。
(2)分析的所有項目的輸入值(包括軟件指令)均以標稱值呈現。
(3)標稱動力有效。
如同時出現兩種或以上的故障,則分別進行處理,并整合成有案可查的附加故障模式。
3.1 故障的可能性
每個故障模式均有一定的發生概率,代表每架無人機發生故障的可能性。故障在一段時間內發生的可能性是該概率乘以無人機在此期間飛行的次數所得的數值(表1)。
3.2 風險分析矩陣
下面采用風險分析矩陣法,從機載設備、通信、軟件漏洞、飛行軌跡位置、地面設施等五個方面進行故障分析,并給出控制措施(表2)。
4 結語
雖然無人機及其控制系統是專門針對安全操作而設計的,并且有了如上的風險分析控制措施,但安全問題仍不可小覷,如有可能,還可利用安全網對無人機演出和公眾進行物理隔離。隨著無人機技術的發展和應用領域的擴充,安全系統也會變得越來越完善。
參考文獻:
[1] 事故/事故征候調查和預防,996/2010號規章,歐盟條例.
[2] AC-91-FS-2015-31《輕小無人機運行規定》[S]. 中國民用航空局飛行標準司.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
汽車維修與保養(2015年6期)2015-04-17 03:31:50
電測與儀表(2015年5期)2015-04-09 11:30:52
汽車維護與修理(2015年2期)2015-02-28 12:15:39