基于限幅增量式PID的直流電動機轉速控制系統
2017-06-19 19:29:48胡傳志沈建華彭曉晶
實驗室研究與探索 2017年5期
胡傳志, 沈建華, 彭曉晶
(1.南通大學 計算機科學與技術學院,江蘇 南通 226019;2.華東師范大學 計算機科學與軟件工程學院,上海 200062;3.恩智浦半導體上海有限公司,上海 201203)
基于限幅增量式PID的直流電動機轉速控制系統
胡傳志1, 沈建華2, 彭曉晶3
(1.南通大學 計算機科學與技術學院,江蘇 南通 226019;2.華東師范大學 計算機科學與軟件工程學院,上海 200062;3.恩智浦半導體上海有限公司,上海 201203)

針對直流電動機轉速控制系統中并不要求多快的響應速度,而追求平穩階躍響應的情況,通常采用步進式PID算法,把較大的階躍信號劃分成若干較小的步長,從而逐步逼近設定值。但是該算法難以應付測量誤差帶來的影響,為此,設計一種基于限幅增量式PID算法的直流電動機轉速控制系統,限幅增量式PID算法通過對增量式PID算法的控制量增量的幅度加以步長限制,使控制量平穩變化,從而實現電動機平穩變速。理論分析和實驗結果表明,因為限幅增量式PID算法的控制量是均勻變化,所以該系統不僅具有平穩的階躍響應,還具有天然的抗干擾能力。
直流電動機; 轉速控制; 限幅增量式PID; 階躍響應; 抗干擾能力
0 引 言
直流電動機的轉速控制問題在自動控制領域中頗為常見,但在設計一種旋轉滴界面張力儀的嵌入式控制系統時碰到了這個問題,該儀器通過一個直流電動機驅動試管旋轉,增加離心力場的作用以測量試管內液滴的界面張力[1]。轉速控制的精確與否直接決定了界面張力測量結果的準確性。鑒于PID控制器積分分量的微調功能,其完全能夠勝任系統的精確度要求,同時因為PID算法簡單,所以在科學研究和工程設計中得到廣泛應用[2-6]。但是在較大階躍信號下,PID控制器會產生較大輸出量,使電動機瞬間達到一個很高的轉速,這對電動機不利,對電動機的驅動對象也不利。所以在追求精確的轉速控制之外,還要考慮使電動機平穩地達到設定轉速,即要求有平穩的階躍響應。
步進式PID不直接對階躍信號進行響應,而是以一定步長逐步逼近所要求的階躍信號,使階躍響應平穩[7]。步進式PID設計一個動態設定值,該動態設定值從當前輸出值開始每個周期增加或減少一個步長直至最終設定值,從而把一個大的階躍信號分割成若干個小的階躍信號。但是前提是每個控制周期輸出值要有相應的幅度變化,而且還不能有測量誤差。事實上,即使前者可控,后者也是不可避免的。
與步進式PID不同,限幅增量式PID直接對控制量的增量進行步長限制,無論設定值和輸出值為多少,控制量的變化都不會超過一個步長,從而使電動機平穩變速。通過改變步長的大小可以調節響應速度、階躍響應的平滑度。即使偶爾的測量誤差,也只會使控制量朝誤差方向移動一個步長,并不會影響大局,所以該算法還有天然的抗干擾能力。
1 系統結構
系統結構如圖1所示,包括微控制器、電動機、用戶界面和開關電壓調節器。

圖1 限幅增量式PID轉速控制系統結構
(1) 微控制器。STM32F051微控制器作為系統的控制核心,提供軟件支持和硬件接口。軟件部分包括PID控制程序和I/O程序。硬件接口部分包括:12位的DAC將PID輸出的控制量u(k)轉換為模擬電壓,電壓值與u(k)成正比[8];32位的定時計數器對電動機編碼器輸出的脈沖信號計數,通過M法計算轉速值[9-10];串行口連接串口屏,建立用戶界面。
(2) 電動機。美國PITTMAN電動機轉速均勻、功率密度大、噪音低、響應快,并帶有光柵編碼器,光柵編碼器是由一系列規律性刻線組成的圓光柵盤作為測量基準并用于旋轉運動測量的傳感器[11]。PITTMAN電動機編碼器有500個光柵,電動機每轉一圈,產生500個脈沖。
(3) 開關電壓調節器。LM2596用來開關電動機以及放大DAC的輸出電壓來驅動電動機,LM2596具有很好的線性和負載調節特性,可調輸出電壓范圍是:1.2 V~37 V[12]。
(4) 用戶界面。串口屏將控制部分和用戶界面部分分離開來,微控制器只需發送相應的串口指令就可以輕松實現文本、圖片和曲線顯示,通過解析接收到的串口指令就可以讀到用戶的輸入信息[13]。
2 限幅增量式PID算法
2.1 算法原理
位置式PID的輸出是控制量全量:
(1)
增量式PID的輸出是控制量增量:
(2)
式中,

(3)
通過對控制量增量的幅度加以步長限制,形成限幅增量式PID:

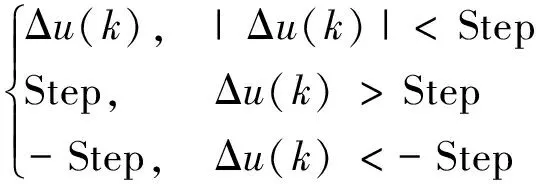
(4)
式中,Step為步長,用來限制控制量增量的幅度。
PID算法中的微分分量用于在系統中引入一個修正信號,給大幅變化的控制量提供適當的制動,從而抑制偏差的變化[14]。鑒于限幅增量式PID的控制量變化是平緩的,所以舍棄微分的修正作用,形成限幅增量式PI算法,不過仍然按照習慣稱其為限幅增量式PID算法,其控制量增量為:
(5)
限幅增量式PID控制器結構如圖2所示

圖2 限幅增量式PID控制器結構
2.2 通過步長調節階躍響應平滑度
限幅增量式PID的控制量變化趨勢為:開始時,|Δu(k)|大于Step,控制量將以步長Step加減,在經歷若干個周期后,輸出值逐步靠近設定值,|Δu(k)|將小于Step,控制量以Δu(k)微調,直至輸出值到達設定值。步長越大,控制量變化越快,階躍響應越快;步長越小,控制量變化越慢;階躍響應越平穩。
2.3 抗干擾能力
PID控制器是一種閉環控制,閉環控制區別于開環控制的本質是設有輸出值的反饋回路[15],根據輸出值與設定值的誤差調整控制器的控制量,使輸出值逐步達到設定值。輸出值的測量數據以流的形式快速、無限、連續、實時地反饋到控制器的輸入端[16],然而數據流中不僅有真實測量值還包含了測量誤差,其中真實測量值是所需要的測量信號,具有確定性;測量誤差是干擾信號,具有隨機性、偶然性。如果將測量誤差作為輸出值輸入到PID控制器,將得到錯誤的計算結果,勢必引起執行器的誤動作。為了提高系統的魯棒性,可以用滑動窗口平均法對輸出值數據流做低通濾波[17],過濾高頻干擾信號,但是在系統響應階段真實測量值的信號頻率也較高,如果處理不當,這部分高頻變化的真實信號會被連同干擾信號一起過濾掉。
因為限幅增量式PID的控制量變化受步長限制,所以不管多大的干擾信號最多只會使控制量變化一點點,因為干擾信號難得出現一次,譬如在使用M法測速時,定時中斷偶爾被其他高級別中斷給耽擱了而導致測量誤差,所以不用擔心這一次一點點的誤動作,其后的真實測量值會立刻將控制量帶回正軌。
3 實驗研究
3.1 根據直流電動機靜態模型確定算法參數
直流電動機的開環階躍響應是穩態的,當控制量一定時,電動機的轉速值在某一點上小幅波動。通過實驗找到多組控制量u和轉速n的對應關系,見表1
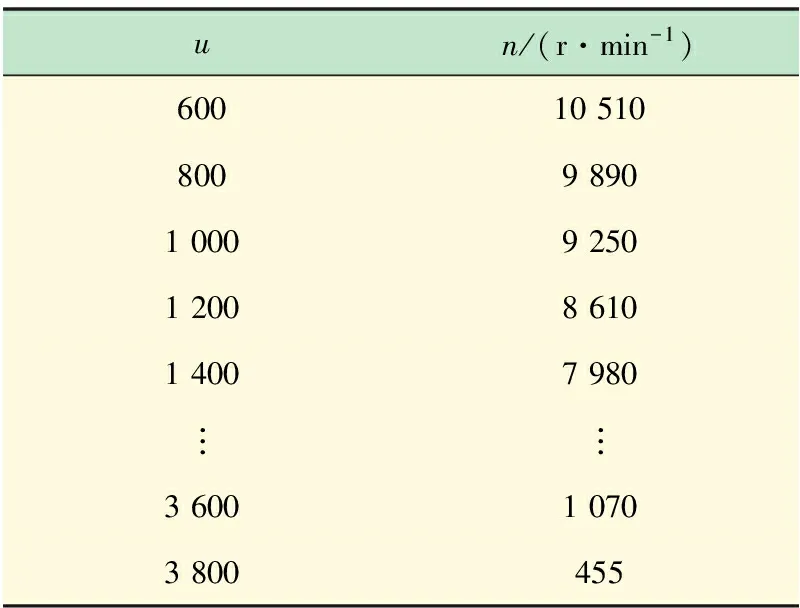
表1 控制量與轉速值對應關系表
將表1中的每組數據作為一個點,把所有的點擬合在一起生成直流電動機的靜態模型曲線[18],如圖3所示,幾乎是一條直線:
n=12 970-3.4u
(6)
式中:n為轉速,r/min;u為控制量。
由靜態模型可以大概確定以下幾個參數:
(1) 控制量取值范圍。根據系統要求的轉速值范圍,通過靜態模型可以計算相應的控制量取值范圍,以此限制控制量的取值,避免系統失控。比如,系統要求的轉速范圍是500~10 000 r/min,為適當留有余地,將控制量的取值范圍定義為[600,4 000]。
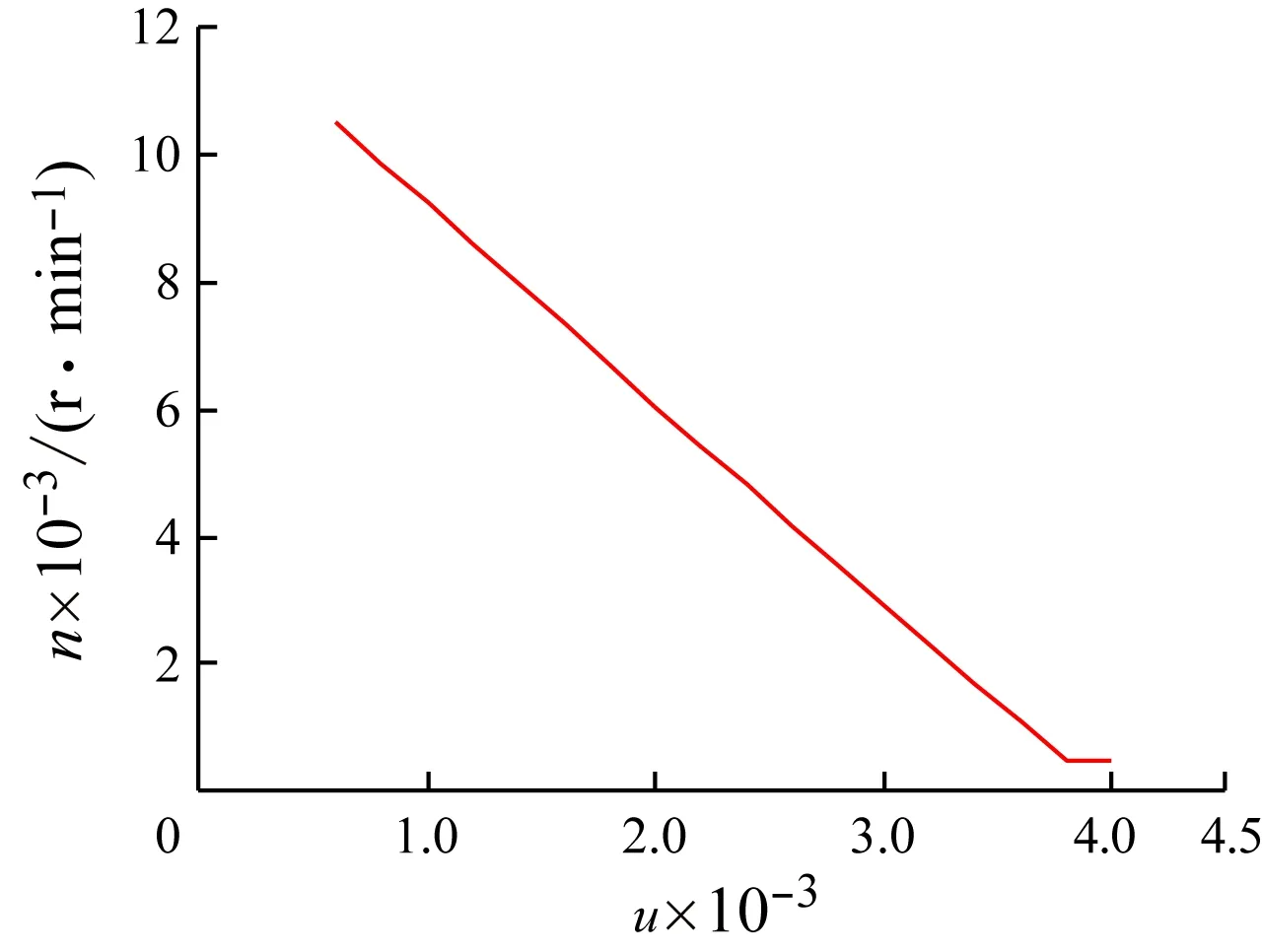
圖3 電動機靜態模型曲線
(2) 控制量初值。對于增量式PID需要給出控制量的初值,因為開機時電動機是靜止的,所以取最低轉速值對應的4 000作為控制量初值。
(3) 控制量增量的步長值。從靜態模型可知,轉速值的變化幅度大概是控制量變化幅度的3.4倍。根據一個控制周期內所期望的轉速值變化幅度除以3.4即得到大概的步長值。
(4) PID參數。因為LM2596的反相作用,使得控制量和轉速值成反比,所以將kp、ki設為負數。
3.2 階躍響應平穩性測試
圖4所示為幾組不同步長所對應的階躍響應曲線。因為控制量最大值為4 000,所以當步長為4 000時,相當于沒有限幅,在開始時因為Δe(k)和e(k)都為很大的值,所以控制量會有一個很大沖擊,見曲線1的尖角。當步長為100時就可以抑制開始時的沖擊量,但是因為大多情況下|Δu(k)|都不大于100,所以控制量以Δu(k)變化,階躍響應曲線呈非線性,也是陡峭的,見曲線2。當步長為10和5時,大多情況下|Δu(k)|都大于步長,所以控制量的變化量為步長,即控制量線性變化。因為電動機的靜態模型是線性的,所以階躍響應曲線也呈線性,見曲線3和4,兩者的區別在于響應時間或者階躍響應的平滑度,如何選擇要視具體的系統需要。
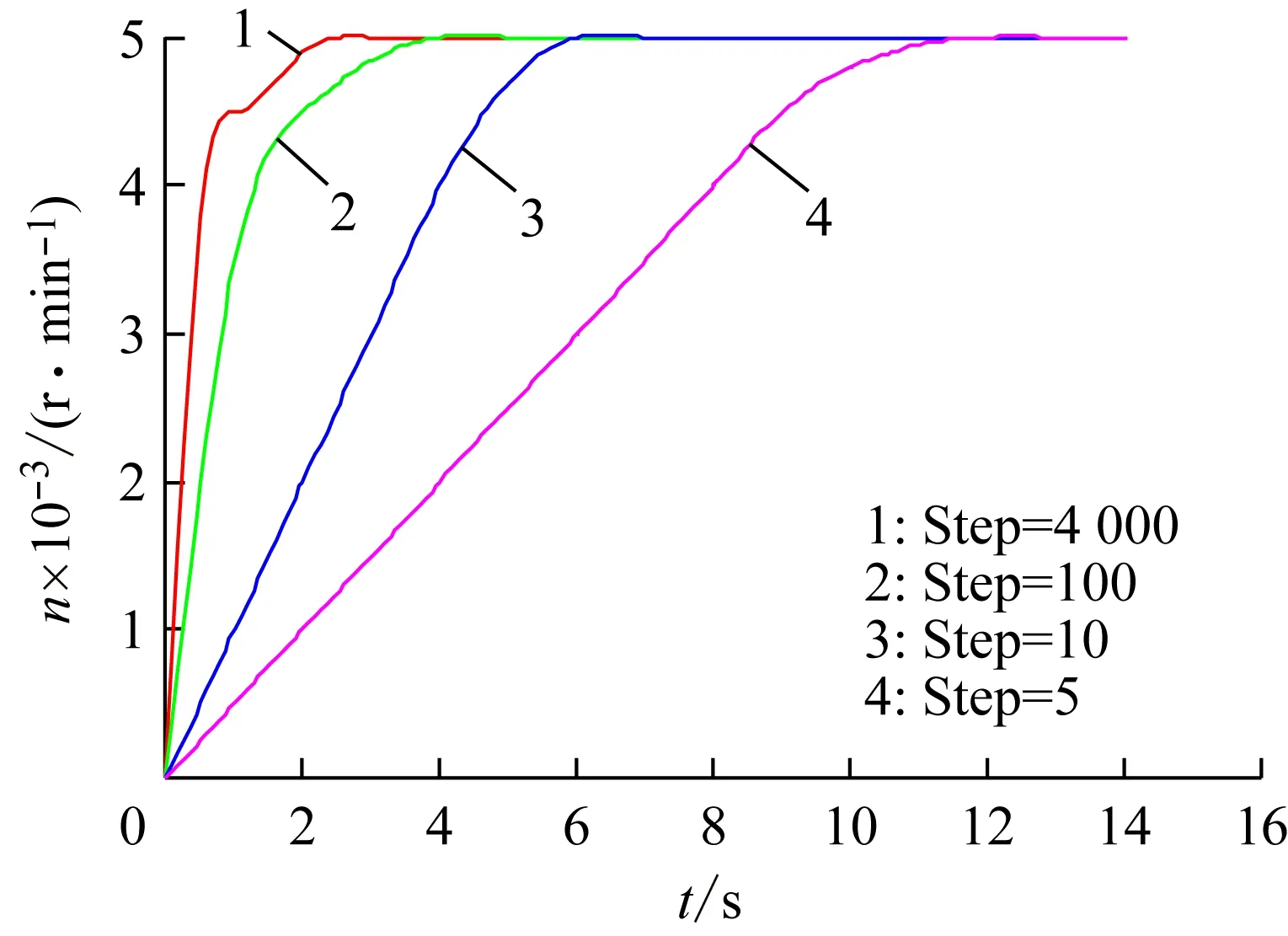
圖4 階躍響應曲線
3.3 抗干擾能力測試
將步長設為10,當電動機轉速穩定在5 000 r/min時,控制量在2 260附近微弱變化。人為地給轉速值加入一個3 000 r/min的測量誤差,控制量曲線看不出變化,如圖5所示。實際上會在當前值上減去10,因為控制量變化很小,所以電動機轉速幾乎不變,有效的抑制了干擾。
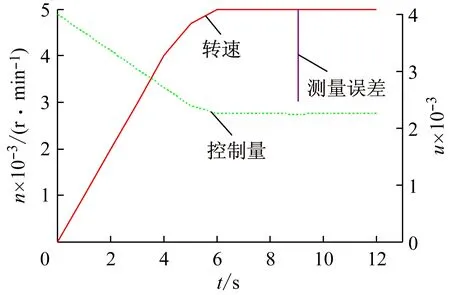
圖5 控制量變化曲線
4 結 語
在一種旋轉滴界面張力儀的嵌入式控制系統設計中含有直流電動機轉速控制,該系統除了要求精確的轉速控制以外,還要求電動機變速平穩。在研究了PID控制原理的基礎上,對增量式PID加以改進,用步長限制增量式PID的控制量增量,形成限幅增量式PID。理論和實驗表明,基于限幅增量式PID的直流電動機轉速控制系統具有以下兩個優點:
(1) 只要步長合適,電動機變速就是平穩的,通過步長還可以調節變速的平滑度;
(2) 因為控制量的變化受步長限制,所以即使有干擾信號,電動機轉速變化也很小,也就是說該系統具有天然的抗干擾能力。
[1] 張彩霞,李世勇,張文超,等.SVT20 旋轉滴界面張力儀測量原理及影響因素分析[J].石油鉆探技術,2011,39(1):115-118.
[2] 張 濤,張曉宇,王輝俊.基于PWM和PID的直流電動機控制系統設計與制作[J].實驗室研究與探索,2014,33(7):134-138.
[3] 沈 峰,鐘勝奎,仲兆準,等.基于LabVIEW 的直流電動機PID 速度控制系統設計[J].電氣與自動化,2014,43(3):189-190,207.
[4] 雷慧杰.基于STM32的直流電動機PID調速系統設計[J].現代電子技術,2016,39(8):165-167,170.
[5] 徐 坤,周子昂,吳定允,等.基于變速積分的無刷直流電動機PID控制系統[J].成都大學學報,2014,33(2):151-153,186.
[6] 劉海珊,陳宇晨.無刷直流電動機PID 控制系統仿真及實驗研究[J].系統仿真學報,2009,21(16):5157-5160.
[7] 劉金琨.先進PID控制MATLAB仿真[M].3版.北京:電子工業出版社,2011:59-61.
[8] ST.RM0091 Reference Manual[OL].2014-10:269.www.st.com.
[9] 張吉月,于 靜.改進的M法轉速測量[J].北京石油化工學院學報,2012,20(3):13-16.
[10] 馬文光,朱德森,王四清.變M法在在電動機速度高精度測量中的應用[J].機械與電子,1999(4):64-66.
[11] 林長友.光柵編碼器發展現狀分析與展望[J].光機電信息,2011,28(6):1-7.
[12] National Semiconductor.LM2596 Datasheet[OL].2002-05:1.www.national.com
[13] 廣州大彩科技.基本型工業串口屏數據手冊V3.0[OL].2014-07:1-5.www.gz-dc.com
[14] 力風滿.數字PID控制算法的研究[J].遼寧大學學報,2005,32(4):367-370.
[15] 吳 麒,王詩宓.自動控制原理[M].2版.北京:清華大學出版社,2006:2-3.
[16] 李建中,張東東.滑動窗口規模的動態調整算法[J].軟件學報,2004,15(12):1800-1814.
[17] 裴益軒,郭 民.滑動平均法的基本原理及應用[J].火炮發射與控制學報,2001(1):21-23.
[18] Astrom K J, Hagglund T. PID controllers:Theory,desing and turnig[M].2nd ed.North Carolina: Instrument Society of America,1995:6-13.
國運興衰,系于教育;教育振興,全民有責,在黨和國家工作全局中,必須始終堅持把教育擺在優先發展的位置。按照面向現代化、面向世界、面向未來的要求,適應全面建設小康社會、建設創新型國家的需要,堅持以育人為根本,以改革創新為動力,以促進公平為重點,以提高質量為核心,全面實施素質教育,推動教育事業在新的歷史起點上科學發展,加快從教育大國向教育強國、從人力資源大國向人力資源強國邁進,為中華民族偉大復興和人類文明進步作出更大貢獻。
——摘自《國家中長期教育改革和發展規劃綱要(2010—2020年)》
DC Motor Speed Control System Based on Step-limiting Incremental PID
HUChuanzhi1,SHENJianhua2,PENGXiaojing3
(1. School of Computer Science Technology, Nantong university, Nantong 226019, Jiangsu, China; 2. School of Computer Science and Software Engineering, East China Normal University, Shanghai 200062, China; 3. NXP Semiconductors Shanghai Co., Ltd, Shanghai 201203, China)
Step PID controller is usually applied in the situation that steady step response is more important than quick response in a DC motor speed control system, but the controller does not work when there exists measurement error. This paper designed a DC motor speed control system based on step-limiting incremental PID controller. The controller limits the increment of the control value of incremental PID by a step to smooth the change of control value, so as to achieve smooth speed shifting. Analytical and experimental results show that owing to the even variation of the control values, this system not only presents steady step response, but also has anti-interference ability in nature.
DC motor; speed control; step limit incremental PID; step response; anti-interference ability
2016-09-15
國家自然科學基金項目(41301514)
胡傳志(1977-),男,江蘇徐州人,碩士,高級實驗師,研究方向為嵌入式系統和自動控制。
Tel.:13515209092;E-mail:hubanxian@ntu.edu.cn
TP 273
A
1006-7167(2017)05-0024-04
