面向現(xiàn)代控制理論實(shí)驗(yàn)教學(xué)的倒立擺虛擬仿真系統(tǒng)
2017-06-19 19:29:48鄧曉剛楊明輝
實(shí)驗(yàn)室研究與探索 2017年5期
鄧曉剛, 楊明輝
(中國石油大學(xué)(華東) 信息與控制工程學(xué)院 山東, 青島 266580)
面向現(xiàn)代控制理論實(shí)驗(yàn)教學(xué)的倒立擺虛擬仿真系統(tǒng)
鄧曉剛, 楊明輝
(中國石油大學(xué)(華東) 信息與控制工程學(xué)院 山東, 青島 266580)

針對現(xiàn)代控制理論實(shí)驗(yàn)資源緊張問題,提出一種基于倒立擺機(jī)理模型的開放式虛擬仿真系統(tǒng)開發(fā)方法。首先,根據(jù)裝置機(jī)理建立倒立擺系統(tǒng)的狀態(tài)空間模型;然后應(yīng)用LabVIEW軟件繪制倒立擺裝置操作界面,并編制后臺程序?qū)崿F(xiàn)其模型仿真;最后利用OPC技術(shù)實(shí)現(xiàn)虛擬仿真系統(tǒng)變量數(shù)據(jù)的共享,以方便學(xué)生測試控制算法。該仿真系統(tǒng)不但具有良好的人機(jī)交互界面,能夠較好地模擬真實(shí)實(shí)驗(yàn)裝置,而且具有很好的開放性,為學(xué)生自主編程留下了充足空間,有助于其創(chuàng)新能力培養(yǎng)。
現(xiàn)代控制理論; 倒立擺; 仿真軟件; LabVIEW
0 引 言
現(xiàn)代控制理論在高校自動化類專業(yè)教學(xué)中占有重要地位。該課程是自動控制原理的后續(xù)課程,同時(shí)也是過程控制工程、計(jì)算機(jī)控制、控制系統(tǒng)仿真等本科專業(yè)課的先修課程,更是線性系統(tǒng)理論、最優(yōu)控制等若干研究生課程的學(xué)習(xí)基礎(chǔ)。現(xiàn)代控制理論主要討論基于狀態(tài)空間法的多輸入多輸出系統(tǒng)分析與設(shè)計(jì)問題,涉及到狀態(tài)空間建模、能控能觀性分析、狀態(tài)反饋控制等大量的理論知識,數(shù)學(xué)推導(dǎo)繁多,概念復(fù)雜抽象,學(xué)生普遍認(rèn)為學(xué)習(xí)難度大。針對此問題,現(xiàn)代控制理論教學(xué)中一般都配置一定學(xué)時(shí)的課程實(shí)驗(yàn),以幫助學(xué)生深入理解控制原理和算法,從而提高課程教學(xué)效果[1-2]。然而,由于設(shè)備資源緊張、場地安排密集、及實(shí)驗(yàn)學(xué)時(shí)有限等因素,學(xué)生往往難以在實(shí)驗(yàn)裝置上開展實(shí)驗(yàn),虛擬仿真實(shí)驗(yàn)就成為現(xiàn)代控制理論實(shí)驗(yàn)教學(xué)中的一個(gè)主要形式。如何更有效地開展虛擬仿真實(shí)驗(yàn),已經(jīng)成為相關(guān)教學(xué)研究人員日益關(guān)注的問題。
虛擬仿真資源建設(shè)在近些年來得到國家和各級高校的普遍重視,高校教學(xué)研究人員進(jìn)行了虛擬資源開發(fā)與實(shí)驗(yàn)?zāi)J椒矫娴纳钊胩剿鱗3-4]。對現(xiàn)代控制理論課程而言,其仿真實(shí)驗(yàn)往往采用基于MATLAB軟件的理論驗(yàn)證模式[5-7],針對給定數(shù)學(xué)模型,學(xué)生編寫相關(guān)程序驗(yàn)證所學(xué)的控制理論。該實(shí)驗(yàn)?zāi)J胶唵我仔校軌蚝芎缅憻拰W(xué)生編程能力,在現(xiàn)代控制理論實(shí)驗(yàn)教學(xué)中發(fā)揮了重要作用。但是由于MATLAB界面編程能力弱,無法直觀圖示實(shí)際工程背景,難以進(jìn)一步提升學(xué)生的學(xué)習(xí)興趣。近年來,LabVIEW軟件逐漸引入并應(yīng)用于高校教學(xué)中,為虛擬仿真實(shí)驗(yàn)教學(xué)提供了新的手段[8]。該軟件具有較好的工藝界面設(shè)計(jì)能力,能夠有效提高虛擬仿真實(shí)驗(yàn)的直觀性。然而如果直接使用LabVIEW軟件開發(fā)封裝的仿真系統(tǒng),僅僅讓學(xué)生改變參數(shù)觀察結(jié)果,又不利于學(xué)生編程能力的鍛煉。因此,如何將LabVIEW和MATLAB軟件結(jié)合起來開發(fā)直觀開放的虛擬仿真系統(tǒng),補(bǔ)充和提升現(xiàn)有的實(shí)驗(yàn)?zāi)J剑侵档蒙钊胙芯康膯栴}。
針對上述問題,本文以倒立擺實(shí)驗(yàn)裝置為例,提出一種面向現(xiàn)代控制理論實(shí)驗(yàn)的開放式虛擬仿真系統(tǒng)設(shè)計(jì)方法。該方法利用LabVIEW軟件開發(fā)友好的操作界面,直觀地反映設(shè)備運(yùn)行過程,提高學(xué)生學(xué)習(xí)興趣;同時(shí),該方法通過OPC通信技術(shù)將將仿真變量發(fā)布為共享變量,學(xué)生可以在MATLAB軟件中自主編程實(shí)現(xiàn)對虛擬實(shí)驗(yàn)裝置的控制,鍛煉學(xué)生的編程能力。基于策略開發(fā)的虛擬仿真系統(tǒng),有效結(jié)合LabVIEW和MATLAB兩類軟件的優(yōu)勢,有助于實(shí)驗(yàn)教學(xué)效果提升。
1 倒立擺實(shí)驗(yàn)裝置的機(jī)理建模
倒立擺裝置是一個(gè)多變量非線性不穩(wěn)定系統(tǒng),其控制方法在機(jī)器人、航天、軍事等領(lǐng)域有著廣泛應(yīng)用,是現(xiàn)代控制理論的理想研究對象[9-10]。我校自動化專業(yè)實(shí)驗(yàn)室購置了6套固高GLIP2002型直線倒立擺實(shí)驗(yàn)裝置,以滿足現(xiàn)代控制理論、運(yùn)動控制、綜合實(shí)驗(yàn)和畢業(yè)設(shè)計(jì)等相關(guān)課程的實(shí)驗(yàn)實(shí)踐教學(xué)需要。但是由于實(shí)驗(yàn)裝置數(shù)量有限,難以充分滿足學(xué)生的使用需求。本文針對真實(shí)倒立擺實(shí)驗(yàn)裝置,開發(fā)相應(yīng)的虛擬仿真系統(tǒng),為現(xiàn)代控制理論實(shí)驗(yàn)提供輔助平臺。
實(shí)驗(yàn)裝置抽象圖示如圖1。倒立擺質(zhì)心到轉(zhuǎn)動軸心的距離為L,質(zhì)量記為m,倒立擺運(yùn)載小車質(zhì)量記為M,該小車由電動機(jī)拖動,其水平控制力記為F,小車的相對位移記為s,擺桿與垂直向上方向的夾角為θ。如果僅僅施加一個(gè)初始作用力,擺桿會倒向一側(cè),因此該系統(tǒng)是不穩(wěn)定系統(tǒng)。倒立擺系統(tǒng)反饋控制的目的是不斷改變控制力F的變化,使小車達(dá)到設(shè)定的位置時(shí)擺桿仍然保持在垂直位置上。
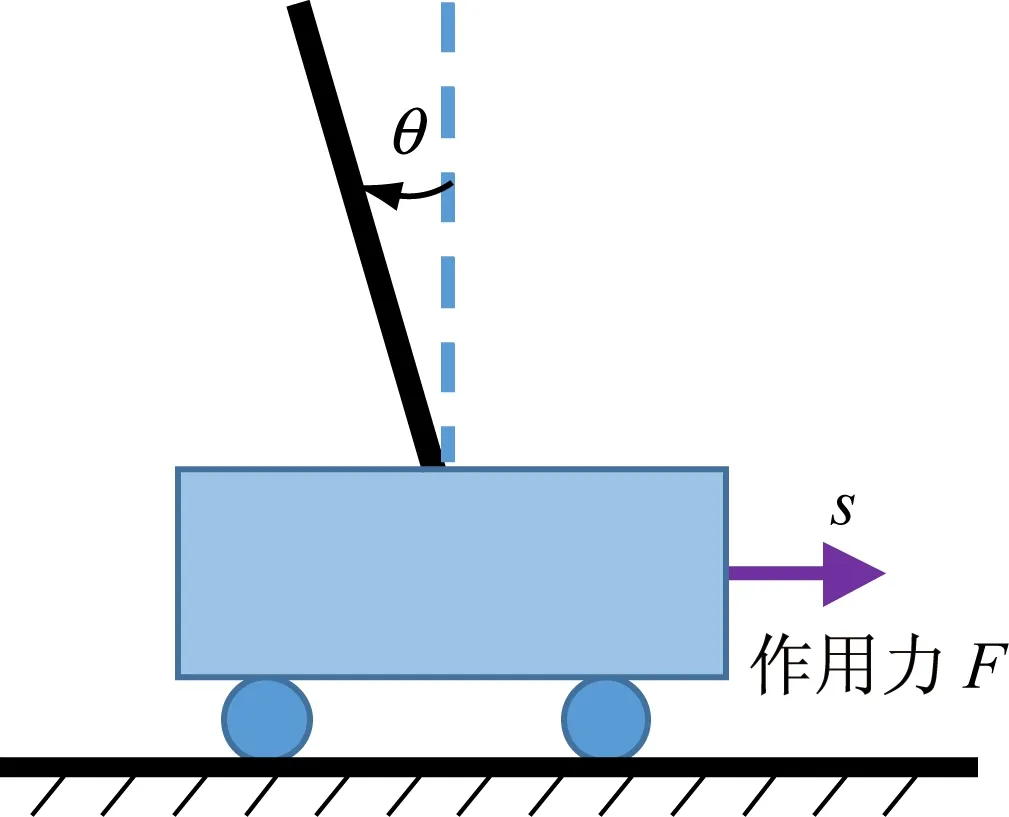
圖1 倒立擺抽象圖示
下面分析倒立擺的運(yùn)動機(jī)理,建立其數(shù)學(xué)模型。對于小車而言,其運(yùn)動方程包括位移方程和速度方程,具體公式如下所示:
(1)
(2)

對于擺桿來說,其角度和角速度運(yùn)動方程用如下公式描述:
(3)
(4)

進(jìn)一步整理以上方程,可以得到倒立擺裝置的系統(tǒng)狀態(tài)方程為:
(5)
式中:
本文模擬的倒立擺裝置其物理參數(shù)數(shù)據(jù)為:M=1.2 kg,m=0.1 kg,b=0.1 N/(m·s),L=0.5 m,I=0.025 kg·m2,g=9.8 m/s2。
2 基于LabVIEW的虛擬仿真實(shí)驗(yàn)系統(tǒng)開發(fā)
2.1 總體系統(tǒng)框架
本文使用LabVIEW軟件開發(fā)倒立擺虛擬仿真系統(tǒng)。LabVIEW軟件是美國國家儀器公司研發(fā)的一種圖形化編程軟件,目前已經(jīng)逐漸在高校科研和工業(yè)自動化生產(chǎn)中得到廣泛應(yīng)用。與其他編程軟件編寫大量源代碼不同,該軟件采用流程圖式的G語言,系統(tǒng)中提供了豐富的封裝模塊,能夠直接完成數(shù)據(jù)采集、虛擬儀表、數(shù)學(xué)運(yùn)算、實(shí)時(shí)曲線等多種功能,為開發(fā)虛擬仿真系統(tǒng)提供了強(qiáng)有力的技術(shù)支撐[11-13]。
依托LabVIEW軟件,倒立擺實(shí)驗(yàn)裝置虛擬仿真系統(tǒng)總體框架如圖2所示,包括設(shè)備操作界面設(shè)計(jì)和后臺仿真程序開發(fā)。前臺操作界面用于直觀的演示控制

圖2 虛擬仿真系統(tǒng)結(jié)構(gòu)框圖
系統(tǒng)和交互設(shè)置控制參數(shù),后臺仿真程序則完成對倒立擺裝置機(jī)理系統(tǒng)的模擬。同時(shí)操作界面和仿真程序中的數(shù)據(jù)可以通過OPC通信技術(shù)進(jìn)行發(fā)布,供外部程序調(diào)用。
2.2 具體開發(fā)流程
要實(shí)現(xiàn)上述虛擬仿真系統(tǒng)的開發(fā),主要涉及3個(gè)步驟:① 前臺操作界面開發(fā);② 后臺仿真程序編制;③ 系統(tǒng)共享數(shù)據(jù)發(fā)布。本文將對上述步驟依次進(jìn)行分析。
(1) 首先分析操作界面的開發(fā)過程。操作界面為虛擬仿真系統(tǒng)提供直觀的圖形顯示和數(shù)據(jù)指示,并提供給定值的輸入接口,具體包括裝置圖示、實(shí)時(shí)曲線、過程參數(shù)、仿真設(shè)置等模塊。裝置圖示用于演示倒立擺的運(yùn)動過程,主要使用“二維圖片”控件完成。插入“二維圖片”空間后,采用修飾性控件或者插入圖片的方式繪制倒立擺的本體設(shè)備圖。實(shí)時(shí)曲線圖用于記錄小車位移和角度的變化曲線,采用Waveform Chart控件完成。過程參數(shù)包括“裝置物理參數(shù)”“狀態(tài)變量”“控制參數(shù)”,均基于數(shù)值輸入和數(shù)值顯示控件。仿真設(shè)置包括“仿真步長”“仿真速度”兩個(gè)參數(shù),前者決定仿真精度,后者調(diào)節(jié)仿真系統(tǒng)的運(yùn)行速度,此外,本系統(tǒng)特別設(shè)置了控制模式選擇開關(guān),包括“狀態(tài)反饋控制演示”和“外部程序控制”兩種模式。選擇前者時(shí),系統(tǒng)啟用預(yù)先設(shè)置的狀態(tài)反饋控制器,學(xué)生可以通過調(diào)節(jié)參數(shù)直接觀察控制效果,選擇后者時(shí),學(xué)生可以通過MATLAB編程自行實(shí)現(xiàn)各種復(fù)雜控制算法。設(shè)計(jì)完成后的操作界面如圖3所示。

圖3 倒立擺虛擬仿真系統(tǒng)界面圖
(2) 繼續(xù)分析后臺程序編制過程。LabVIEW采用流程圖式的編程語言,形象直觀,編程方便。編程過程中,首先添加while循環(huán)結(jié)構(gòu),作為整個(gè)系統(tǒng)的運(yùn)行條件。然后在while循環(huán)中增加相應(yīng)的數(shù)學(xué)運(yùn)算、公式節(jié)點(diǎn)、圖形繪制模塊,以實(shí)現(xiàn)對倒立擺機(jī)理模型的仿真。整個(gè)程序的核心是公式節(jié)點(diǎn)的編制,公式節(jié)點(diǎn)如圖4所示。本文采用歐拉算法在“公式節(jié)點(diǎn)”模塊完成機(jī)理仿真,也可采用更為復(fù)雜的龍格庫塔算法。同時(shí),采用圖片函數(shù)庫中的“繪制點(diǎn)”“繪制線”“繪制矩形”等實(shí)現(xiàn)倒立擺擺桿的動畫演示。

圖4 公式節(jié)點(diǎn)圖
在上述工作完成后,就形成了一個(gè)初步的仿真系統(tǒng)。該系統(tǒng)是封閉的,只具有演示功能,其他軟件無法訪問仿真裝置的數(shù)據(jù)。為了增強(qiáng)系統(tǒng)的開放性,本文應(yīng)用LabVIEW共享變量引擎將倒立擺仿真系統(tǒng)部分?jǐn)?shù)據(jù)發(fā)布到OPC Server中,供外部程序編程訪問。
OPC(OLE for Process Control)技術(shù)是一種基于微軟公司COM/DCOM技術(shù)的標(biāo)準(zhǔn)數(shù)據(jù)通信架構(gòu)。利用該技術(shù),可以實(shí)現(xiàn)Windows系統(tǒng)中不同計(jì)算機(jī)程序之間的數(shù)據(jù)交換,無需針對不同設(shè)備和不同軟件開發(fā)特定性程序。如果已經(jīng)構(gòu)建好OPC Server,編程人員就可在不同軟件平臺下使用OPC通信協(xié)議來實(shí)現(xiàn)對公共數(shù)據(jù)的讀取和修改。
LabVIEW軟件的共享變量引擎(shared variable engine,SVE),是將虛擬仿真數(shù)據(jù)方便的發(fā)布到OPC Server的有效方法。共享變量(Shared Variable)是LabVIEW 8.0版本后引入的一種新的變量類型,需要在項(xiàng)目文件中才能創(chuàng)建。使用共享變量時(shí),在項(xiàng)目瀏覽窗口中右鍵單擊一個(gè)項(xiàng)目庫,在快捷菜單中選擇“新建”、“變量”來打開共享變量屬性對話框,按照要求配置各個(gè)選項(xiàng)即可。建立所有共享變量后,右鍵單擊項(xiàng)目庫并選擇“部署”菜單,系統(tǒng)會將共享變量發(fā)布到指定的OPC Server:National Instruments.Variable Engine.1中。完成該工作后,可在LabVIEW程序框圖引用變量,也可將共享變量與已有的控件進(jìn)行綁定。
3 在現(xiàn)代控制理論實(shí)驗(yàn)中的應(yīng)用
倒立擺虛擬仿真軟件系統(tǒng)建立完成后,可以通過MATLAB程序?qū)崿F(xiàn)對倒立擺的控制,本節(jié)分析具體的編程思路和驗(yàn)證結(jié)果。
3.1 基于MATLAB軟件的控制算法編程
MATLAB軟件提供了OPC Toolbox,用戶可以用MATLAB命令行方式直接運(yùn)行所有的OPC Toolbox函數(shù),創(chuàng)建和配置OPC對象,實(shí)現(xiàn)對OPC服務(wù)器數(shù)據(jù)讀寫。本文在此簡要分析MATLAB軟件M語言編程訪問倒立擺虛擬仿真系統(tǒng)的過程,主要涉及的命令包括OPC服務(wù)器的創(chuàng)建、鏈接、配置以及OPC項(xiàng)的讀寫。
OPC對象的創(chuàng)建命令為opcda,其用法如下:
da = opcda('localhost', 'National Instruments.Variable Engine.1');
在上式中,da為自定義的opc對象名稱,創(chuàng)建后可以采用connect命令鏈接OPC對象。
進(jìn)一步應(yīng)用addgroup,additem命令可以配置OPC變量組和OPC變量項(xiàng),使用read和write命令可以實(shí)現(xiàn)對OPC數(shù)據(jù)的讀寫,結(jié)合timer函數(shù),在MATLAB中可以實(shí)現(xiàn)對OPC數(shù)據(jù)的定時(shí)操作:
t= timer(‘TimerFcn’,原位復(fù)合UserFunction,‘Period’,Ts,‘ExecutionMode’,‘fixedRate’);
其中,t為自定義的timer對象名稱,可以start和stop命令來啟動和停止,Ts為采樣周期,UserFunction是需要用戶自行編寫的程序,用于實(shí)現(xiàn)控制算法及實(shí)時(shí)記錄仿真數(shù)據(jù)。
3.2 實(shí)驗(yàn)測試結(jié)果
本文通過狀態(tài)反饋控制器和狀態(tài)觀測器的實(shí)驗(yàn)應(yīng)用來說明軟件的可行性。狀態(tài)反饋控制器和狀態(tài)觀測器設(shè)計(jì)是對現(xiàn)代控制系統(tǒng)理論知識的綜合運(yùn)用[14-15],能夠很好地反映學(xué)生對控制理論的理解程度。在狀態(tài)反饋控制器實(shí)驗(yàn)中,學(xué)生根據(jù)給定性能要求,自行設(shè)計(jì)閉環(huán)系統(tǒng)極點(diǎn),然后計(jì)算狀態(tài)反饋控制器參數(shù)。本文將閉環(huán)系統(tǒng)的主導(dǎo)極點(diǎn)配置在-1.5+1.5j和-1.5-1.5j,然后實(shí)時(shí)狀態(tài)反饋控制,其控制效果如圖5所示。從圖5可以看出,當(dāng)給定值發(fā)生變化時(shí),倒立擺的位移曲線具有良好的動態(tài)性能。以全維狀態(tài)觀測器的設(shè)計(jì)為例,全維狀態(tài)觀測器可以實(shí)現(xiàn)對4個(gè)系統(tǒng)狀態(tài)的觀測。篇幅限制,本文僅給出位移狀態(tài)的觀測結(jié)果。為考察觀測器性能,觀測系統(tǒng)的位移狀態(tài)初始值設(shè)為0.05,而真實(shí)的位移初始值為0。觀測結(jié)果如圖6所示。從圖中看出,盡管初始時(shí)刻存在0.05的偏差,但是狀態(tài)觀測器能夠迅速跟蹤上真實(shí)的狀態(tài),從而說明觀測器具有較好的觀測性能。

圖6 狀態(tài)觀測器結(jié)果示意圖
4 結(jié) 語
針對現(xiàn)代控制理論仿真實(shí)驗(yàn)教學(xué)問題,構(gòu)建了基于倒立擺機(jī)理模型的虛擬仿真系統(tǒng)。該系統(tǒng)提出的方法具有直觀性和開放性兩方面的優(yōu)點(diǎn)。① 基于真實(shí)倒立擺裝置的機(jī)理模型和物理參數(shù),利用LabVIEW開發(fā)系統(tǒng)虛擬仿真系統(tǒng),具有較高的工藝逼真度和操作可視性,有助于提升學(xué)生的學(xué)習(xí)興趣;② 本文所設(shè)計(jì)的系統(tǒng)基于OPC通信技術(shù)實(shí)現(xiàn)仿真數(shù)據(jù)的開放性操作,為學(xué)生留下充足的自由發(fā)揮空間,學(xué)生可以通過MATLAB編程實(shí)現(xiàn)對仿真數(shù)據(jù)的訪問,自主測試新算法,有利于學(xué)生動手能力和創(chuàng)新能力的提高。目前在現(xiàn)代控制理論教學(xué)中的初步應(yīng)用結(jié)果表明,上述系統(tǒng)引起學(xué)生極大的動手編程興趣,提高了學(xué)生對現(xiàn)代控制理論知識的深入理解。
[1] 李 武, 榮 軍, 丁躍澆. 現(xiàn)代控制理論課程實(shí)驗(yàn)的對比教學(xué)法[J]. 實(shí)驗(yàn)技術(shù)與管理, 2015,32(6): 204-207.
[2] 王衛(wèi)紅, 袁少強(qiáng), 吳云潔, 等. 現(xiàn)代控制理論研究型自主性綜合實(shí)驗(yàn)教學(xué)方法[J].實(shí)驗(yàn)室研究與探索, 2006, 25(6): 673-674.
[3] 李 平, 毛昌杰, 徐 進(jìn). 開展國家級虛擬仿真實(shí)驗(yàn)教學(xué)中心建設(shè)提高高校實(shí)驗(yàn)教學(xué)信息化水平[J].實(shí)驗(yàn)室研究與探索, 2013,32(11):5-8.
[4] 鄧曉剛. 過程控制實(shí)驗(yàn)裝置的機(jī)理建模與虛擬仿真軟件開發(fā)[J].實(shí)驗(yàn)室研究與探索, 2015,34(10): 99-103.
[5] 周 蘭, 周少武. MATLAB數(shù)字仿真在現(xiàn)代控制理論教學(xué)中的應(yīng)用[J].當(dāng)代教育理論與實(shí)踐, 2014,6(5): 104-106.
[6] 葉彪明. 基于MATLAB的《現(xiàn)代控制理論》課程的實(shí)驗(yàn)設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索, 2004,23(1): 28-30.
[7] 伍 星, 郝惠娣, 翟惠榮, 等. 淺談“現(xiàn)代控制系統(tǒng)“課程中的MATLAB教學(xué)[J].高等理科教育, 2003,51(5): 43-47.
[8] 吳震宇, 方 敏, 丁 康. 基于LabVIEW的二級倒立擺控制系統(tǒng)三維仿真[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版), 2011,34(10):1480-1484.
[9] 袁少強(qiáng), 程 鵬. 現(xiàn)代控制理論系列實(shí)驗(yàn)的設(shè)計(jì)與實(shí)踐[J].實(shí)驗(yàn)技術(shù)與管理, 2005,22(3):98-99.
[10] 李雪冰, 馬 莉, 丁世宏. 一類新的二階滑模控制方法及其在倒立擺控制中的應(yīng)用[J].自動化學(xué)報(bào), 2015,41(1):193-202.
[11] 袁 浩, 朱 暢, 陳志敏. 基于LabVIEW的自動控制仿真系統(tǒng)設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索, 2006, 25(4):457-459.
[12] 鄧曉剛, 于作軍. 連續(xù)攪拌反應(yīng)釜機(jī)理建模與開放式虛擬仿真系統(tǒng)開發(fā)[J].實(shí)驗(yàn)技術(shù)與管理, 2016,33(1):114-117.
[13] 張?zhí)m勇. LabVIEW程序設(shè)計(jì)基礎(chǔ)與提高[M].北京:機(jī)械工業(yè)出版社, 2013.
[14] 袁少強(qiáng), 郭艷玲, 張 平, 等. 基于工程項(xiàng)目教學(xué)法的控制實(shí)驗(yàn)平臺建設(shè)[J].實(shí)驗(yàn)室研究與探索, 2013,32(11): 425-428.
[15] 劉 豹, 唐萬生. 現(xiàn)代控制理論[M]. 3版. 北京:機(jī)械工業(yè)出版社, 2011.
國運(yùn)興衰,系于教育;教育振興,全民有責(zé),在黨和國家工作全局中,必須始終堅(jiān)持把教育擺在優(yōu)先發(fā)展的位置。按照面向現(xiàn)代化、面向世界、面向未來的要求,適應(yīng)全面建設(shè)小康社會、建設(shè)創(chuàng)新型國家的需要,堅(jiān)持以育人為根本,以改革創(chuàng)新為動力,以促進(jìn)公平為重點(diǎn),以提高質(zhì)量為核心,全面實(shí)施素質(zhì)教育,推動教育事業(yè)在新的歷史起點(diǎn)上科學(xué)發(fā)展,加快從教育大國向教育強(qiáng)國、從人力資源大國向人力資源強(qiáng)國邁進(jìn),為中華民族偉大復(fù)興和人類文明進(jìn)步作出更大貢獻(xiàn)。
——摘自《國家中長期教育改革和發(fā)展規(guī)劃綱要(2010—2020年)》
Inverted Pendulum Virtual Simulation System Development for Modern Control Theory Experiment Teaching
DENGXiaogang,YANGMinghui
(College of Information and Control Engineering, China University of Petroleum (East China), Qingdao 266580, Shandong, China)
In order to solve the problem of shortage of modern control theory experiment resource, this paper proposes an open virtual simulation system development method based on the inverted pendulum mechanism model. First, the state space model of the inverted pendulum is constructed based on the device mechanism. Then LabVIEW software is applied to draw the inverted pendulum device operation interface and the background programs are designed to achieve its model simulation. Finally, the OPC technology is used to share the data of virtual simulation system, which helps students to test the control algorithms. The constructed simulation system has not only a good interface to simulate the real experimental device, but also the excellent openness, it also leaves enough space for students to perform independent programming, and contributes to cultivate their innovative ability.
modern control theory; inverted pendulum; simulation software; LabVIEW
2016-09-15
國家自然科學(xué)基金(61403418); 山東省自然科學(xué)基金(ZR2014FL016); 中國石油大學(xué)青年教改項(xiàng)目(2013-28); 中國石油大學(xué)校級實(shí)驗(yàn)教改重點(diǎn)項(xiàng)目(SY-A201407)
鄧曉剛(1981-),男,山東東營人,博士,副教授,主要從事工業(yè)過程建模、先進(jìn)控制與故障診斷等方向的教學(xué)與科研工作。
Tel.:0532-86983472; E-mail:dengxiaogang@upc.edu.cn
TP 391.9
A
1006-7167(2017)05-0079-05
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當(dāng)代陜西(2022年5期)2022-04-19 12:10:18
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學(xué)學(xué)報(bào)(自然科學(xué)版)(2020年4期)2020-12-14 07:05:00
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國教育技術(shù)裝備(2016年11期)2016-12-01 06:53:03
