三維激光掃描技術在水利測繪中的應用
2017-06-21 10:18:20河南省水利信息中心
河南水利與南水北調 2017年5期
關鍵詞:測繪
(河南省水利信息中心)
三維激光掃描技術在水利測繪中的應用
□韓慧穎(河南省水利信息中心)
三維激光掃描技術的應用,可以極大地提高測繪的精度和效率,降低野外數據采集強度,更能保障數據的實效性。其具有突出優勢的測繪手段為實現智能化水利,尤其是對坐落在地形變化劇烈的深山峽谷中進行水庫、水電站壩址區等水利工程的大比例尺測圖顯得更具優勢;應用三維測繪技術可以對水利工程進行精準的變形監測、汛情監測,可為決策者提供科學依據。通過對三維激光掃描技術的分析,以期在更廣闊的領域中得到應用和拓展。
三維數據采集;高精度;高效率;水庫水電站;精準監測
0 引言
三維激光掃描技術(3D Laser Scanning)是測繪與信息領域中的創新性技術,被稱為繼GPS技術之后的里程碑式的革新,已經在地形測繪、文物保護、城市建筑及工業等多領域中成功地應用,并日漸拓展。
實踐表明,三維激光掃描技術是精細化測繪中的最佳技術手段,其具有三大突出優勢:一是非接觸、無損方式,對掃描對象能實現不可達目標的遙測;二是精度高,能獲取掃描對象真實現狀的三維數據,尤其是不規則幾何外形目標,最高精度能達到幾十個微米;三是效率高,最高能達到每秒一百萬個點,大大降低了野外數據采集強度,能有力保障其時效性。在努力實現智能化水利的進程中,把三維測繪技術運用到水利建設與管理中來將成為不可或缺的技術手段,尤其是對坐落在地形變化劇烈的深山峽谷中進行水庫、水電站壩址區的大比例尺測圖顯得更具優勢。應用三維測繪技術對水庫大壩及其他防洪工程進行精準的變形監測、汛情監測,所完成的信息統計分析和虛擬,形成準確、詳實的技術成果,可為決策者提供無可置疑的科學依據,必將大大提高防洪保安能力。由于這項技術在水利行業中的應用還處于初級階段,為此,筆者對三維測繪技術中的幾個要點作簡要闡述,以期與同仁們一起探討、創新。
利用三維激光掃描技術進行測繪,其內容主要包括:三維精細掃描、三維數據處理、圖件制作三個方面:一是精細掃描:利用現有三維激光掃描,對掃描對象進行三維精細數據采集,作為資料永久存檔;二是三維數據處理:對原始掃描數據進行處理加工,為后續工作提供分析依據;三是圖件制作:用三維點云模型,制作平立剖面圖、特征部位剖面圖等,為數據分析提供基礎圖件。
1 三維掃描數據獲取
1.1 現場踏勘
為能夠更好地了解掃描目標的實際情況,需要親自去現場進行踏勘,確定掃描目標物的具體位置,然后根據掃描目標物的空間分布、外部形態、內部架構,繪制現場草圖,結合需要掃描的精度和分辨率,大概確定一下掃描站的站數和位置,畫出控制網草圖。
1.2 儀器準備
針對所要掃描的目標對象,選用合適的三維激光掃描儀,例如RIEGL VZ-1000。
1.3 儀器安置
儀器應盡量安置在平坦處,并做固定處理,確保在掃描時不會出現震蕩偏移,以保證儀器的安全和數據質量。為了能夠得到要掃描的目標對象的完整空間信息,儀器的安置應盡量避開遮擋物,并使相鄰兩次掃描站的掃描區域有重疊部分,站點不能設置太遠,必須在掃描儀的有效掃描距離內,還必須設置合理的站數,站數如果選擇少了,就會出現掃描盲區,拼接后的數據有黑洞,如果站數過多,就會降低掃描效率,增加掃描時間,也會積累拼接的誤差,所以應該根據實際情況,設置盡量少且合理的站數,獲得最佳的掃描結果。
1.4 標靶布設
為了將多個測站掃描獲取的不同坐標系的點云數據拼接到同一坐標系中,以求獲得目標對象表面完整的形狀信息,合理地布置標靶尤為重要。基本方法與原則:一是每兩個測站之間至少應放置3個不在同一直線上的標靶;二是測量標靶的位置要遵循“為下一個測站服務”的原則,盡量做到“多站式兼顧”,即將標靶設置在盡可能多的測站都能掃描得到的位置,以減少標靶數量和點云數據在多站點拼接處理的誤差;三是避免遺漏設置標靶。
1.5 掃描目標
在掃描目標對象之前,需要設定分辨率,掃描儀自動掃描,掃描完后自動存儲數據,然后移動至下一站,按照作業流程進行下一站的掃描,直至完整獲得點云數據。
1.6 數據檢查與保存
掃描完成后用圖形工作站對掃描數據的完整性進行現場檢查,檢查合格數據及時保存。若有區域漏掃,則需加站掃描,直至數據完整可用。
1.7 成果形式及精度要求
近景三維數據獲取對應的成果為原始三維點云數據;精度為無損方式,獲取目標對象的點云數據具有完整性。
2 三維數據處理
內業數據處理主要包括點云預處理、點云拼接、整體點云處理、圖件制作等。
2.1 精度要求及控制
一是三維整體點云模型精度與原始點云精度一致;二是在三維點云模型建立各步驟中,通過改進點云簡化、三角網建立算法,確保整體三維點云模型精度符合要求。
2.2 點云數據預處理
點云數據預處理是三維激光掃描數據處理中必不可少的步驟,點云數據模型是后續內業處理工作的基礎數據,點云數據結果直接影響到后續模型建立的質量,及利用點云模型進行分析、正射影像圖及相關圖件制作效果。預處理流程如圖1所示。
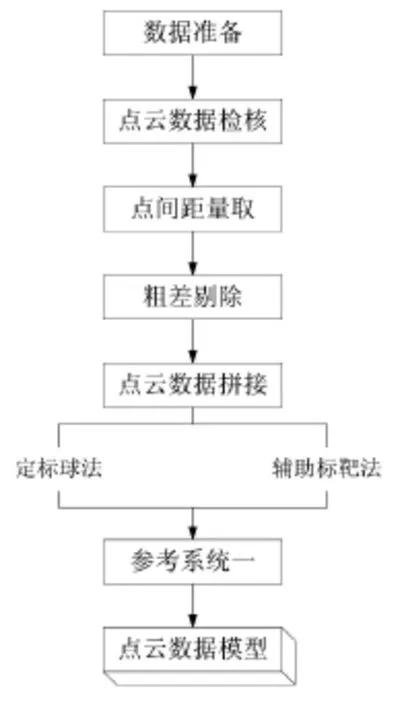
圖1 點云預處理流程圖
2.2.1 數據準備
準備三維點云原始數據。
2.2.2 點云數據檢核
掃描過程中,由于被掃描物體之間的相互遮擋,難免會引起數據的缺失。同時,掃描外界條件因素也可能引起數據的分層。所以,點云數據檢核是點云數據預處理中必不可少的一步。若分層嚴重,則視該數據為不合格數據;若分層較少或不存在分層現象,視該數據合格,少量分層可通過后續點云粗差剔除及去噪操作處理。
2.2.3 點間距量取
點間距量取是指使用三維軟件手動抽樣進行點云中相鄰兩點之間空間最短距離的量取。通過點間距量取操作,可檢查所獲取點云密度是否滿足精度要求,并為后續三維模型建立時數據簡化步驟提供幫助。點間距應滿足精度要求。
2.2.4 粗差剔除
由于測量過程中難免儀器出現一些異常振動、以及鏡面反射等原因,在真實數據點中往往混有不合理的噪聲點,包含大量的粗差、錯誤和無關信息,所以有必要對數據進行去噪和平滑濾波的處理。
2.2.5 點云數據拼接
運用專業軟件,自動將各站三維點云數據拼接,并檢查測站與測站拼接精度,發現問題及時處理。提取目標點云,將多余點云刪除,將點云數據分塊導出。
2.2.6 參考系統一
由于激光測量機或三坐標測量機自身結構的不足,以及數據處理過程的需要,在某些情況下需要對數據點云進行坐標變換,將所有測站數據統一歸并到獨立坐標系。根據外業所測得標靶點坐標,可實現點云數據模型轉正,便于后續處理。
3 圖件制作
主要是通過三維點云模型,按照測量標準制作立面圖、剖面圖、正射圖等圖件,表現掃描對象的特征,從而直觀反映相關信息,并進行存檔分析。
利用AutoCAD軟件繪制圖件時需包括圖廓、圖名、文字標注、比例尺等內容,各項要求應符合工程相關規定。
4 結語
三維激光掃描技術的應用提供了更為豐富的成果圖件和可視化顯示方法,大大減少了前期的數據提取和分析工作,能夠深入理解掃描對象的現狀信息并且更加有效地管理和保護。
編輯:左英勇

TP206
:B
:1673-8853(2017)05-0089-02
2017-04-17
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年5期)2015-12-20 09:07:37
衛星與網絡(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09