便攜式手外骨骼康復(fù)裝置結(jié)構(gòu)研究
2017-06-29 12:00:51
中國(guó)設(shè)備工程 2017年11期
關(guān)鍵詞:康復(fù)
(東北大學(xué),遼寧 沈陽 110819)
便攜式手外骨骼康復(fù)裝置結(jié)構(gòu)研究
肖鍇,周一方,張璞,雒佳,楊建宇
(東北大學(xué),遼寧 沈陽 110819)
本文針對(duì)當(dāng)下手外骨骼康復(fù)裝置的研究現(xiàn)狀及其裝置體積重量過大、靈活性差、康復(fù)性差、實(shí)用性差、應(yīng)用價(jià)值小等缺點(diǎn),提出了一種全新設(shè)計(jì)的機(jī)械結(jié)構(gòu)的手部外骨骼康復(fù)裝置的食指部分的結(jié)構(gòu)。先對(duì)手部外骨骼的研究背景、研究意義展開討論,接著介紹此版手部外骨骼的機(jī)械結(jié)構(gòu),最后簡(jiǎn)要的介紹外骨骼的驅(qū)動(dòng)電路的設(shè)計(jì)。
中風(fēng)患者;手部外骨骼;康復(fù)裝置
我國(guó)腦中風(fēng)患者約有3/4的病人在不同程度上失去了勞動(dòng)和生活自理能力。現(xiàn)今的康復(fù)辦法為由康復(fù)醫(yī)師對(duì)患者實(shí)施康復(fù)療法,造成了康復(fù)成本昂貴,人力資源短缺等問題。所以開發(fā)一款手部外骨骼來協(xié)助患者的康復(fù)變得越來越重要。康復(fù)性手部外骨骼的出現(xiàn)將會(huì)為廣大的中風(fēng)患者提供巨大的幫助。
手部外骨骼的研究始于20世紀(jì)90年代,現(xiàn)已有多種手部外骨骼結(jié)構(gòu)方案。Andreas Wege和他的同事開發(fā)了一款連桿機(jī)構(gòu)的手部外骨骼,但是這種結(jié)構(gòu)仍存在體積過大,運(yùn)動(dòng)笨拙精度不高等缺點(diǎn)。Xun Luo及他的同事開發(fā)了一套用增強(qiáng)現(xiàn)實(shí)來幫助康復(fù)的手部外骨骼,但其控制精度值得進(jìn)一步論證且結(jié)構(gòu)欠缺實(shí)用性。Satoshi Ito及他的同事開發(fā)了一款固定式手部外骨骼,雖然機(jī)械性能可靠,但是其便攜性及實(shí)用性仍有差距。Vishalini Bundhoo及他的同事開發(fā)了一款以記憶彈簧為驅(qū)動(dòng)器的線驅(qū)外骨骼,雖然大大減少了結(jié)構(gòu)的尺寸,但是裝置的輸出功率及精度卻仍有待提升。
本文針對(duì)上述問題提出了一種以電機(jī)齒輪驅(qū)動(dòng)為主體配合優(yōu)化的耦合方案為結(jié)構(gòu)的新型手部外骨骼。本文先介紹了此種外骨骼的結(jié)構(gòu)組成及結(jié)構(gòu)原理。然后又對(duì)結(jié)構(gòu)進(jìn)行了運(yùn)動(dòng)學(xué)仿真分析并討論了仿真分析的結(jié)論及實(shí)用性。下面具體的討論這種新型的手部外骨骼康復(fù)裝置的方案。
1 結(jié)構(gòu)原理(圖1)
本文設(shè)計(jì)的手部外骨骼裝置的組成部分為食指第一指節(jié),食指第二指節(jié),食指第三指節(jié),手背上固定的導(dǎo)軌及導(dǎo)軌上支撐的第三指節(jié)驅(qū)動(dòng)滑塊,分別固定在第三指節(jié)電機(jī)固定槽里的二級(jí)電機(jī)與固定在第三指節(jié)驅(qū)動(dòng)滑塊里的一級(jí)電機(jī),主從耦合帶輪之間的鋼絲及松緊帶。食指第三指節(jié)由電機(jī)固定槽,一級(jí)耦合驅(qū)動(dòng)輪組成。食指第一指節(jié)上包含次級(jí)耦合驅(qū)動(dòng)輪,食指第二指節(jié)上包含第二指節(jié)驅(qū)動(dòng)齒輪。
第三指節(jié)的一級(jí)耦合驅(qū)動(dòng)輪與第二指節(jié)之間由鉚釘連接形成轉(zhuǎn)動(dòng)副,第二指節(jié)驅(qū)動(dòng)齒輪與第三指節(jié)之間由鉚釘連接形成轉(zhuǎn)動(dòng)副;第一指節(jié)上的次級(jí)耦合驅(qū)動(dòng)輪與第二指節(jié)指節(jié)鉚釘連接形成轉(zhuǎn)動(dòng)副,第一指節(jié)連接孔與第二指節(jié)連接孔由鉚釘連接形成轉(zhuǎn)動(dòng)副;第三指節(jié)與推桿之間形成鉚釘連接轉(zhuǎn)動(dòng)副,推桿與第三指節(jié)驅(qū)動(dòng)滑塊之間形成鉚釘連接轉(zhuǎn)動(dòng)副,滑塊與導(dǎo)軌之間形成滑動(dòng)副,導(dǎo)軌通過固定裝置固定在手背上。
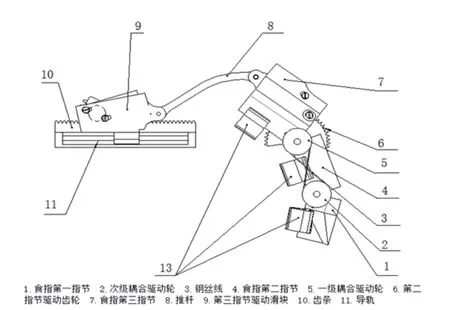
圖1 結(jié)構(gòu)原理圖
固定在第三指節(jié)驅(qū)動(dòng)滑塊電機(jī)固定槽里的電機(jī)通過控制系統(tǒng)控制通電轉(zhuǎn)動(dòng),電機(jī)輸出軸上的圓柱形齒輪與齒條嚙合并傳遞動(dòng)力,驅(qū)動(dòng)整個(gè)滑塊前后運(yùn)動(dòng)。滑塊的前后運(yùn)動(dòng)推動(dòng)或拉動(dòng)推桿的運(yùn)動(dòng),推桿拉動(dòng)或者推動(dòng)食指第三指節(jié)。第三指節(jié)上的松緊帶致力于使手指第三指節(jié)與外骨骼第三指節(jié)之間的縫隙變化不超過允許值,否則會(huì)影響機(jī)構(gòu)的運(yùn)動(dòng)效果。
第三指節(jié)電機(jī)固定槽里的電機(jī)通過控制電路控制通電轉(zhuǎn)動(dòng),輸出軸上的圓柱齒輪與第二指節(jié)驅(qū)動(dòng)齒輪相嚙合,通過電機(jī)的轉(zhuǎn)動(dòng)帶動(dòng)驅(qū)動(dòng)齒輪的轉(zhuǎn)動(dòng)。由于驅(qū)動(dòng)齒輪與第二指節(jié)是固定的,所以驅(qū)動(dòng)齒輪的轉(zhuǎn)動(dòng)直接驅(qū)動(dòng)第二指節(jié)的轉(zhuǎn)動(dòng)。第二指節(jié)的轉(zhuǎn)動(dòng)通過耦合裝置將動(dòng)力傳遞到第一指節(jié),導(dǎo)致第一指節(jié)隨動(dòng),完成了對(duì)第一指節(jié)的驅(qū)動(dòng)。
整個(gè)手部外骨骼裝置在控制電路的統(tǒng)一協(xié)調(diào)下,完成近似正常手部運(yùn)動(dòng)的運(yùn)動(dòng)軌跡,對(duì)于佩戴此手部外骨骼的患手進(jìn)行驅(qū)動(dòng),完成康復(fù)動(dòng)作。
2 運(yùn)動(dòng)學(xué)仿真分析
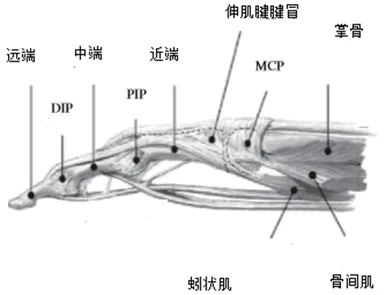
圖2 人手生理結(jié)構(gòu)圖
人手生理結(jié)構(gòu)圖見圖2。
根據(jù)Janyu Yang及其同事的工作,我們擁有了手指動(dòng)作的函數(shù)。如式(1)與(2)所示。

其中在公式(1)中x代表MCP轉(zhuǎn)動(dòng)角度,y代表PIP轉(zhuǎn)動(dòng)角度。在公式(2)中u代表PIP轉(zhuǎn)動(dòng)角度,v代表DIP轉(zhuǎn)動(dòng)角度。上述公式是由上述團(tuán)隊(duì)把角度傳感器裝置佩戴到正常人的手上后進(jìn)行了11次抓握并進(jìn)行相關(guān)數(shù)學(xué)計(jì)算后得出的優(yōu)化解。
表1中列出了所涉及的符號(hào)及其相關(guān)含義以及對(duì)應(yīng)的數(shù)值,以下內(nèi)容均以表1為基礎(chǔ)展開。
如圖3所示,考慮了零件形狀,滑塊推進(jìn)時(shí)對(duì)指套產(chǎn)生的翻轉(zhuǎn)力矩等因素后,該裝置的預(yù)想效果是電機(jī)驅(qū)動(dòng)滑塊從C運(yùn)動(dòng)至E,使手指從水平位置移動(dòng)到數(shù)值位置,即運(yùn)動(dòng)了90°。

圖3 第三指節(jié)運(yùn)動(dòng)簡(jiǎn)圖

表1 相關(guān)符號(hào)及其物理意義及數(shù)值
根據(jù)機(jī)構(gòu)的幾何形狀及其幾何關(guān)系可以推導(dǎo)出第三指節(jié)的運(yùn)動(dòng)學(xué)方程如(3)所示。

由于第一指節(jié)與第二指節(jié)之間存在耦合驅(qū)動(dòng)關(guān)系,且DIP第一指節(jié)關(guān)節(jié)與PIP第二指節(jié)關(guān)節(jié)之間的耦合驅(qū)動(dòng)輪半徑之比為1:1.4。由此可知第一指節(jié)轉(zhuǎn)動(dòng)角度與第二指節(jié)轉(zhuǎn)動(dòng)角度之間成線性關(guān)系。如圖4所示,即為耦合裝置的實(shí)物圖。耦合裝置由兩個(gè)成一定比例的驅(qū)動(dòng)線輪及鋼絲組成。鋼絲纏繞在驅(qū)動(dòng)線輪上并保持一定的預(yù)緊力,以此達(dá)到耦合驅(qū)動(dòng)的目的。
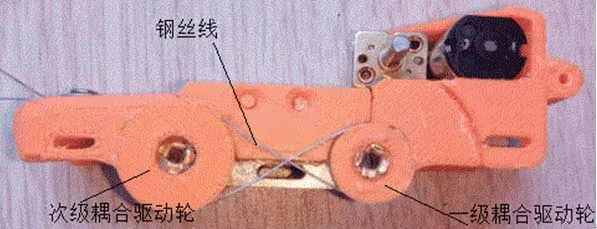
圖4 第一指節(jié)與第二指節(jié)間耦合驅(qū)動(dòng)結(jié)構(gòu)圖

圖5 PIP與DIP間的仿真曲線
真實(shí)的手部的運(yùn)動(dòng)經(jīng)過安裝角度傳感器后進(jìn)行抓握伸展等動(dòng)作后,得出手指各個(gè)關(guān)節(jié)之間的角度關(guān)系,這個(gè)關(guān)系可以用一個(gè)函數(shù)進(jìn)行表示。圖5中的紅色曲線代表真實(shí)手指的PIP關(guān)節(jié)與DIP關(guān)節(jié)之間的角度關(guān)系。為使裝置實(shí)現(xiàn)手指的伸展與彎曲,手掌的抓握等功能,且賦予研究更加嚴(yán)謹(jǐn)?shù)目茖W(xué)性,使用了MATLAB進(jìn)行裝置的運(yùn)動(dòng)學(xué)仿真。第三指節(jié)轉(zhuǎn)動(dòng)角度與滑塊的運(yùn)動(dòng)距離間的仿真關(guān)系如圖6,第一指節(jié)與第二指節(jié)之間的轉(zhuǎn)動(dòng)角度之間的仿真關(guān)系如圖6。通過提取仿真曲線上的數(shù)據(jù)可獲得完成一次手指彎曲時(shí)的各個(gè)關(guān)節(jié)及滑塊的運(yùn)動(dòng)角度及運(yùn)動(dòng)距離數(shù)據(jù)。據(jù)圖可以看出,機(jī)構(gòu)的運(yùn)動(dòng)曲線趨近于真實(shí)手指的運(yùn)動(dòng)曲線,曲線間的誤差處于可信區(qū)間之內(nèi)。所以可以判定,本文討論的手部外骨骼裝置可以完成康復(fù)手部運(yùn)動(dòng)的功能。

圖6 MCP第三指節(jié)與滑塊間的仿真曲線
3 結(jié)語
本文為了達(dá)到幫助中風(fēng)患者治療手部殘疾的目的,研究開發(fā)了一款手部外骨骼裝置,該裝置可以通過松緊帶等部件固定于手部佩戴以實(shí)現(xiàn)幫助患手實(shí)現(xiàn)反復(fù)抓握的動(dòng)作。本文對(duì)該裝置進(jìn)行了機(jī)構(gòu)分析,運(yùn)動(dòng)仿真等研究工作。分析與實(shí)驗(yàn)結(jié)果表明,該裝置能有效實(shí)現(xiàn)預(yù)期目標(biāo)。
[1]甘增康.手部功能康復(fù)機(jī)器人電氣控制系統(tǒng)的設(shè)計(jì)與研究[J].哈爾濱工業(yè)大學(xué),2011, 6.
[2]Andreas Wege, Konstantin Kondak, and GUnter Hommel :Mechanical Design and Motion Control of a Hand Exoskeleton for Rehabilitation,Proceedings of the IEEE International Conference on Mechatronics & Automation Niagara Falls,Canada.July 2005 .
[3]Xun Luo, Tiffany Kline, Heidi C. Fischer, Kathy A. Stubblefield, Robert V. Kenyon, Derek G. Kampe:Integration of Augmented Reality and Assistive Devices for Post-Stroke Hand Opening Rehabilitation,Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference Shanghai, China, September 1-4, 2005.
[4]Satoshi Ito, Yasuhiko Ishigure, Satoshi Ueki, Jun Mizumoto,Yutaka Nishimoto, Motoyuki Abe, Haruhisa Kawasaki:A hand rehabilitation support system with improvements based on clinical practices,Preprints of the 9th International Symposium on Robot Control (SYROCO’09) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-12, 2009.
[5]Vishalini Bundhoo, Edmund Haslam, Benjamin Birch and Edward J. Park :A shape memory alloy-based tendon-driven actuation system for biomimetic artifcial fngers, part I: design and evaluation ,Robotica (2009) volume 27, pp. 131–146.
[6]Vishalini Bundhoo, Edmund Haslam, Benjamin Birch, Edward J. Park, A shape memory alloy-based tendon-driven actuation system for biomimetic artifcialfngers,partI:designandevaluation,R obotica27(01)(2009)131–146.
[7]JianyuYang,HualongXie,JiashunShi :A novel motion-coupling design for a jointless tendon-driven finger exoskeleton for rehabilitation .

R469
:A
:1671-0711(2017)06(上)-0080-03
本文研究工作得到自然基金(N51505072)的資助。
猜你喜歡
康復(fù)(2023年11期)2023-11-20 07:45:54
康復(fù)(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護(hù)理與康復(fù)(2021年2期)2021-03-05 08:10:44
家庭醫(yī)學(xué)(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復(fù)醫(yī)學(xué)(2017年7期)2017-01-16 01:11:02
中國(guó)衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45