模糊PI控制的三相四橋臂有源電力濾波器
2017-06-29 12:02:06李曉,李山
重慶理工大學學報(自然科學) 2017年5期
李 曉,李 山
(重慶理工大學 電氣與電子工程學院, 重慶 400054)
?
模糊PI控制的三相四橋臂有源電力濾波器
李 曉,李 山
(重慶理工大學 電氣與電子工程學院, 重慶 400054)
針對于三相四橋臂有源電力濾波器(active power filter,APF)直流側PI系數難以整定的問題,提出了一種基于模糊理論的PI控制器的設計方法。模糊PI控制器通過在傳統PI控制器的基礎上加入模糊控制算法來降低PI參數的整定難度。理論分析與仿真結果表明:該控制器具有如下優點:參數整定容易;相對于傳統PI控制器,具有更好的動態性能和靜態性能;APF具有更好的諧波和無功電流的補償性能;在電網電壓擾動的情況下仍能對電容電壓進行無靜差跟蹤。
三相四橋臂;有源電力濾波器;模糊理論;模糊PI控制器;PI參數
除了電壓、頻率以外,負載的無功消耗和線路中各次諧波的含量也是衡量電能質量的重要指標,根據電能質量優劣來對電能定價也已成為電力市場的發展方向。目前,家用電器中應用電力電子技術的設備越來越多,對電網的諧波干擾也越來越嚴重,大量非線性、不平衡負載的接入會嚴重影響電網的供電質量,有時還會造成電網電流畸變,從而影響輸電效率和設備壽命[1-4],因此降低電網的無功消耗和諧波注入越來越重要。傳統的補償無功和濾除諧波的方式是采用無源濾波器。無源濾波器具有成本低、運行穩定的優點,但是諧波濾除效果差、濾波范圍單一、無功補償為定量等缺點也較為明顯。與傳統的無源濾波器相比,有源電力濾波器(active power filter,APF)憑借其優良的動態性能和補償效果正被廣泛應用在某些對電能質量要求較高的場所[5-6]。
直流側大電容保證了APF的儲能需求,并在APF未使用時保證二極管反向關斷,在APF需要補償諧波電流時根據控制指令控制逆變電路輸出所需的補償電流。APF在工作時會從電網吸收有功功率,并且自身開關器件會產生開關損耗,這都會引起電容電壓的波動,而電容電壓的穩定直接影響APF的補償性能。另外,電網電壓的波動也會造成電容電壓波動。因此,對APF的控制不僅要對補償電流指令進行控制,還要對電容電壓進行控制,在擾動下保證電容電壓迅速穩定。傳統的APF直流側穩壓控制通常采用PI控制,通過電容電壓實際值與參考值的差值來控制APF吸收或釋放有功功率,以保證APF的有功平衡。但是傳統PI控制超調量大、靜差大的缺點較為明顯,對于模型復雜的系統來說PI參數難以整定。
20世紀60年代,L.A.Zadeh提出用模糊邏輯來描述模糊的和不確定的知識。基于模糊邏輯的模糊控制器適用于系統模型不確定或系統模型復雜的情況。相比于PI控制器,模糊PI控制器具有更好的動、靜態性能。文獻[7]對模糊PID控制器進行設計和仿真。文獻[8]將模糊控制和PI控制相結合,構建復合控制器來對APF直流側進行穩壓,并驗證APF在擾動情況下的補償性能。文獻[9]研究了一種低成本的三相四開關APF,并在直流側采用模糊PI控制器穩壓。
但是,上述文獻的研究多為負載平衡的三相三線制系統,而常見的低壓配電網一般為三相四線制結構。此外,上述文獻利用電感來濾除APF輸出側的開關紋波,其濾波效果并不能達到預期要求[10-16]。本文針對三相四線制系統設計了基于模糊PI控制器的三相四橋臂APF濾波器。APF的控制采用直接電流控制,APF輸出側采用LCL濾波,并在電壓波動的情況下對APF進行性能分析。仿真結果證明了模糊PI控制器在提高APF諧波和無功電流補償性能方面的作用。
1 三相四橋臂APF控制系統
APF的控制方式采用直接電流控制,控制對象為逆變器側電流ia_x(x分別為a、b、c)。基于模糊PI控制器的APF拓撲結構如圖1所示。

圖1 三相四橋臂并聯型APF拓撲結構
APF補償系統主電路由電網、逆變橋和LCL濾波器組成。LCL濾波器由網側電感Lg、逆變器側電感La、濾波電容C和阻尼電阻R組成。ig_x和ia_x分別為輸入電網電流和APF輸出電流。若三相系統參數一致,則流過逆變器側電感La的電流ia_x可表示為:

(1)
其中:uc_x表示各相濾波電容的電壓值;Ud為直流側電容電壓。sx表示開關器件的開關狀態,sx=1表示x橋臂上管導通,下關關斷;sx=0反之。類似地可得流過網側電感Lg的電流ig_x,表示為:
(2)
其中ux表示電網各相的相電壓。同理,在電容支路,由基爾霍夫定理可得電容C電壓為:
(3)
通過Park變換,將三相四橋臂APF模型轉換到兩相旋轉坐標系下。當不考慮中線電流時,d-p坐標系下的三相四橋臂APF的數學模型為:
(4)
其中:sy(y分別為d、q)表示d-p坐標系下的開關函數;ω為d-p坐標系的旋轉速度。
由上述公式可知:逆變器的輸出電流直接受到直流側電壓的影響,輸入電網的電流和濾波電容的電壓也會受到直流側電壓的影響,直流側電壓的穩定直接影響APF的補償性能。由式(4)可知:經過Park變換后,d-p坐標系下的電流、電壓分量之間引入了交叉耦合。
2 模糊PI控制器設計
模糊PI控制器的基本原理如圖2所示。

圖2 模糊PI控制器的基本原理
模糊PI控制器分為PI控制器和模糊控制器兩部分,其中模糊控制器的主要作用是通過模糊控制規則來對PI控制器的參數進行修正,ΔKp與ΔKi分別為對應PI參數的修正值。模糊控制器的輸入為直流側電容電壓的變化量ΔUd與其變化速率dΔUd。
本文利用Matlab的模糊控制組件來設計模糊控制器,輸入輸出量均滿足模糊集{NB,NM,NS,ZO,PS,PM,PB}。模糊控制器的輸入量為ΔUd和dΔUd,滿足三角形隸屬函數,如圖3(a)(b)所示;輸出量為ΔKp和ΔKi,滿足簡單高斯隸屬函數,如圖3(c)(d)所示。表1為模糊控制器的控制規則,控制規則由PI參數整定規則和整定經驗制定。模糊控制器的關系生成方法和推理合成算法采用Mamdani方法,去模糊化方法采用重力中心算法。

表1 模糊控制規則

圖3 輸入輸出量的隸屬函數
3 APF補償系統控制
3.1 逆變器控制
圖4為圖1的單相等效電路模型,其中:u為電網電壓;uo為逆變器輸出電壓;i為逆變器輸出電流。忽略電感電容的電阻分量,Zg=Lgs,Za=Las,Zc=1/sC。

圖4 單項APF等效電路模型
從電路的角度來看,單相APF電路中逆變器輸出電流可表示為
(5)
其中Δ=ZaZg+ZaZc+ZgZc。
由式(5)可得單相等效模型下的APF輸出電流控制框圖,如圖5所示,其中:iref為參考電流;i為逆變器輸出電流;Kpwm表示逆變器的放大系數;GPI=Kp+Ki/s。

圖5 APF輸出電流框圖模型
逆變器的控制采用直接電流控制,控制方式采用APF輸出側電流反饋控制。由圖5所示的采用APF輸出側電流反饋控制的框圖模型以及式(5)所示的傳遞函數可知逆變器的閉環傳遞函數為
(6)
其中Λ=1+KpwmGPI(s)G1(s)。
逆變器輸出電流與電網電壓傳遞函數的特征方程為
LaLgCs4+LgCKpKpwms3+(La+Lg+
(7)
由式(7)可知:當濾波器參數和PI參數設計合理時,單閉環逆變器輸出電流控制是可以穩定的。
3.2 補償電流檢測
補償電流檢測采用基于FBD功率理論的檢測方法。FBD功率理論將負載電流視作為電網電壓作用在并聯電導和電納上的結果,基本原理如圖6所示,其中:u為電網電壓; iL為負載電流; iL1、iLh分別表示基波和h次諧波分量;G1、B1和Gh、Bh分別表示對應基波和h次諧波分量的電導、電納。
電網電壓在理想狀態下G1、B1為常數,Gh、Bh為交流分量,經過低通濾波器后可求得基波電流對應的電導G1和電納B1。利用G1可求得負載所需的基波有功功率為
ip=G1u
(8)
其中ip表示基波電流有功分量。

圖6 FBD功率理論的基本原理
APF在補償負載諧波電流的同時,為了補償負載無功電流,補償電流需要包含負載所需的諧波和無功電流。當負載電流畸變時,負載電流可表示為基波和各次諧波電流的和,其中基波電流又可表示為有功分量和無功分量之和,因此只需求得負載所需的基波有功電流分量后,再利用負載電流減去此分量,即可求得負載所需的補償電流。
基于FBD功率理論的諧波、無功和中線電流檢測方法框圖如圖7所示,其中:ihabc表示負載所需的補償電流;in表示中線補償電流。

圖7 諧波、無功和中線電流檢測方法框圖
3.3 濾波器設計
APF中開關器件的動作會造成輸出電流中含有高次諧波。為了避免高次諧波對電網的影響,APF需要在輸出側加裝濾波器來濾除開關器件動作所產生的高次諧波。
常用的無源濾波方式有電感濾波、無阻尼LCL濾波和阻尼LCL濾波,上述濾波方式所對應的伯德圖如圖8所示,其中:藍色線為電感濾波伯德圖;綠色線為無阻尼LCL濾波伯德圖;紅色線為阻尼LCL濾波伯德圖。參數設置如表2所示。

圖8 濾波器伯德圖

參數數值逆變器側電感La/mH0.2網側電感Lg/mH0.1濾波電容C/μF60阻尼電阻R/Ω4電網相電壓U/V220工作頻率f/Hz50直流側電容Capf/μF10000直流側電壓Ud/V700
3種濾波方式在低頻段的濾波性能差別不大,在高頻段濾波性能差異較大。APF開關器件動作產生的紋波電流多為高次諧波,對高次諧波濾除較差的濾波電感不能滿足濾波要求。無阻尼LCL濾波對高次諧波的濾除效果最好,但是存在嚴重的諧振問題,會影響補償系統的穩定性。阻尼LCL濾波避免了諧振問題,濾波性能也滿足對高次諧波的濾除要求,但是阻尼電阻的引入會增加系統的有功損耗。本文旨在研究模糊PI控制器對APF補償性能的影響,所以輸出濾波方式采用阻尼LCL濾波。
4 仿真驗證
通過Matlab對APF補償系統進行仿真驗證,主電路參數如表2所示。圖9為APF補償系統中的負載模型,分別為不平衡負載與整流負載。電網負載為負載1并聯負載2,負載1中R1=50Ω,L1=10mH,R2=R3=25Ω,L2=L3=5mH。負載2是三相整流負載,直流側R4=44Ω,L4=2mH。

圖9 負載模型
圖10從上到下的波形分別為電網電壓、負載電流、中線電流、APF補償后電網電流,并且0.2s后將負載1與負載2中的電阻負載減小到一半,負載電流與電網電流升高。圖11為負載無擾動時電網電流的諧波分析結果,可見在APF投入使用后,電網電流總諧波失真(THD)從12.87%降為1.51%,滿足國標要求,且低于PI控制下的THD。
圖12中:實線為模糊PI控制器下APF直流側的電容電壓波形;虛線為PI控制器下APF直流側的電容電壓波形。由圖12可知:相比于PI控制器,在模糊PI控制器作用下,APF直流側電容電壓反應更快,超調更小,穩態誤差也更小。

圖10 負載變化時的電壓和電流波形

圖11 電網電流諧波分析

圖12 直流側電容電壓
圖13為電網電壓擾動下的直流側電容電壓,可見在0.2s到0.22s時電網電壓變為1.5倍,其中:紅色實線為模糊PI控制器下APF直流側的電容電壓波形;藍色虛線為PI控制器下APF直流側的電容電壓波形。由圖13可知:在電網電壓擾動的情況下,模糊PI控制器下的APF直流側電容電壓能夠更快地穩定在參考電壓值。
5 實驗結果
為驗證上述仿真和分析的正確性,利用加拿大Opal-RTTechnologies推出的工業級實時仿真工具RT-LAB搭建實驗平臺,通過RT-LAB搭建的半實物仿真平臺對仿真結果進行驗證。
三相四橋臂APF的實驗結果如圖14所示。圖14(a)為補償前后的電網電流,在經過一個周期后畸變的電網電流被補償為標準的正弦波;圖14(b)為APF運行時將負載電阻減小到一半時的波形;圖14(c)為補償后的電網中線電流,接近于0。

圖14 電網電流波形
在電網電壓波動下,圖15分別為PI控制器和模糊PI控制器下的APF直流側電容電壓波形。其中在1s到1.2s時電網電壓突變為1.5倍。由圖15可知:模糊PI控制器具有超調量小、抗干擾能力強、穩態誤差小的優點。
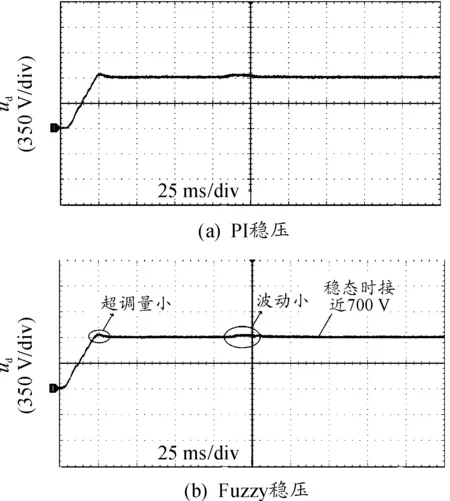
圖15 電壓波動時直流側電容電壓
6 結束語
本文建立了基于模糊PI控制器的APF補償系統,設計了模糊PI控制器并對其控制性能進行研究。實驗結果證明:模糊PI控制器有助于APF對電網諧波和無功電流的補償,網側電流接近正弦波,直流側電容電壓穩定在給定值,能夠在負載不平衡的情況下補償諧波、無功和中線電流,避免了PI參數整定繁瑣的問題,并且模糊PI控制器在電網電壓波動的情況下仍能跟蹤控制,使直流側電容電壓穩定在給定值。
[1] 戴珂,劉聰,李彥龍,等.并聯APF對兩類非線性負載的諧波補償特性研究[J].電工技術學報,2013,28(9):79-85.
[2] 于晶榮,粟梅,孫堯.有源電力濾波器的改進重復控制及其優化設計[J].電工技術學報,2012,27(2):235-242.
[3] 李小葉,李永麗,張瑋亞,等.有源電力濾波器的改進重復控制及其優化設計[J].電網技術,2015,39(2):556-562.
[4] 曹武,江楠,劉康禮,等.改進諧波分次檢測結合集中電流環的APF諧波獨立控制實現[J].中國電機工程學報,2014,34(6):387-396.
[5] 李達義,孫玉鴻,熊博,等.一種并聯型有源電力濾波器的新型控制方法[J].電力系統自動化,2014,38(15):112-123.
[6] 韋微,陳新,陳杰,等.三相四橋臂PWM整流器的研究[J].電工技術學報,2014,29(8):128-135.
[7] 常鵬飛,曾繼倫,王彤,等.三相四線有源電力濾波器直流側電壓控制方法[J].電力系統自動化,2005,29(8):75-78.
[8] 何娜,武建,徐殿國.有源電力濾波器直流電壓的模糊控制[J].電網技術,2006,30(14):45-48.
[9] 劉宏超,彭建春.模糊PI控制三相四開關并聯型APF研究[J].電力電子技術,2009,43(8):4-6.
[10]HEJinwei,LIYunwei,SHIRAJUMMM.Aflexibleharmoniccontrolapproachthroughvoltage-controlledDG-gridinterfacingconverters[J].IEEEtransactionsonindustrialelectronics,2012,59(1):444-455.
[11]SHIRAJUMMM,LIYunwei,TIANHao,etal.ImprovedresidentialdistributionsystemharmoniccompensationschemeusingpowerelectronicsinterfacedDGs[J].IEEEtransactionsonsmartgrid.2016, 7(3):1191-1203.
[12]郭珂,曾意,劉強,等.LCL濾波器在具有有源濾波功能的光伏并網系統中的應用[J].電力系統保護與控制,2013,41(3): 73-79.
[13]金亮亮,周荔丹,姚鋼,等.適用于并網逆變器的新型LCL濾波器設計[J].電力系統保護與控制,2016,44(11):1-8.
[14]梁營玉,劉建政,許杏桃,等.基于電源電流和負載電流檢測的前饋加反饋的三相四線制APF控制策略[J].電力自動化設備,2015,35(1):94-100.
[15]韋微,陳新,陳杰,等.三相四橋臂PWM整流器的研究[J].電工技術學報,2014,29(8):128-135.
[16]鄭丹,廖敏,劉振權,等.三相四線有源電力濾波器的三閉環控制策略[J].電力系統保護與控制,2014,42(22): 95-99.
(責任編輯 劉 舸)
Three-Phase Four-Leg Active Power Filter Based on Fuzzy PI Controller
LI Xiao, LI Shan
(College of Electrical and Electronic Engineering, Chongqing University of Technology, Chongqing 400054, China)
Aiming at the problem that PI parameters of active power filter (APF) are difficult to adjust, a design method of PI controller based on fuzzy theory is proposed. The fuzzy PI controller applies a fuzzy control algorithm to traditional PI controller, which reduces the difficulty of adjusting the PI parameters. Theoretical analysis and simulation results show that the fuzzy PI controller has the following advantages. Firstly, it has easy access to the PI parameters. Secondly, compared with a traditional PI controller, it has better dynamic and static performance. Thirdly, it can make APF obtain better performance in harmonics and reactive current compensation. Fourthly, it can track the capacitive voltage without steady-state error when grid voltage changes.
three-phase four-leg; active power filter; fuzzy theory; fuzzy PI controller; PI parameters
2017-02-08 基金項目:重慶市科委基礎科學與前沿技術研究一般資助項目(cstc2016jcyjA0324,cstc2015jcyjA70013)
李曉(1991—),男,甘肅人,碩士,主要從事電能變換與控制研究,E-mail:2696160148@qq.com; 通訊作者 李山(1965—),男,博士,教授,主要從事電能變換與控制研究,E-mail:lishan@ cqut.edu.cn。
李曉,李山.模糊PI控制的三相四橋臂有源電力濾波器[J].重慶理工大學學報(自然科學),2017(5):148-155.
format:LI Xiao, LI Shan.Three-Phase Four-Leg Active Power Filter Based on Fuzzy PI Controller[J].Journal of Chongqing University of Technology(Natural Science),2017(5):148-155.
10.3969/j.issn.1674-8425(z).2017.05.025
TM46
A
1674-8425(2017)05-0148-08
