山羊坡地行走的步態(tài)分析
2017-06-30 16:14:49張伏王唯張國英王俊邱兆美
江蘇農業(yè)科學 2017年8期
張伏+王唯++張國英++王俊++邱兆美++毛鵬軍


摘要:為研究山羊坡地的行走狀態(tài)和運動規(guī)律,以36°坡地為例,采用高速攝像系統(tǒng)記錄了山羊36°坡地的上坡行走過程,并將運動序列存儲至計算機中,利用SigmaScan軟件和Matlab軟件對存入計算機的試驗影像結果進行處理分析,得出山羊36°坡地上的運動步態(tài)特性參數(shù)和坡地運動過程中各腿腿部的角度變化曲線。結果表明,在36°坡面的上坡過程中,山羊采用的步態(tài)為靜步態(tài)和對角小跑步態(tài);在上坡過程中,山羊各腿的負荷因數(shù)為0.645±0.205,即腿處于支撐相的時間遠大于處于移動相的時間,說明山羊各腿的支撐相大于移動相,這種特點可增加山羊運動的穩(wěn)定性,為仿山羊農業(yè)機械坡地行走機構的設計提供基礎試驗數(shù)據,能夠促進四足行走機構關鍵技術的發(fā)展和應用領域的擴展。
關鍵詞:農業(yè)工程;仿生;山羊;高速攝像;坡地;步態(tài)
中圖分類號: S126文獻標志碼: A文章編號:1002-1302(2017)08-0196-03
行走步態(tài)作為自然界動物最常使用的1種生物特征,是研究步行式行走機構的基礎[1-3]。目前,隨著行走機構研究的深入,單足、2足、3足、4足、6足、8足甚至更多足數(shù)的步行式行走機構均已出現(xiàn),其中以4足步行行走機構的研究最為廣泛。近年來,研究地面各類4足行走動物的行走狀態(tài)和運動規(guī)律有很多,但國內外對山羊這種4足哺乳動物的研究較少。山羊軀體較小,四肢骨骼堅實有力,它的支撐足離散地接觸地面,可自主選擇最佳落足點。其運動軌跡是一系列孤立的點,具有主動隔振能力,能以較高速度在凸凹不平和松軟地面上運動,能耗較小,可遠距離行走;其運動步態(tài)敏捷輕快,能在地面、坡地、陡壁和山區(qū)等凸凹不平的地表上自由靈活地進行跨越運動,受環(huán)境限制較小。山羊可作為行走機構研究的基礎,為研究適應復雜環(huán)境的農業(yè)機械行走機構提供新思路[4-10]。本研究引入高速攝像技術對山羊36°坡地運動狀態(tài)進行了拍攝,并應用SigmaScan軟件和Matlab軟件對所拍攝圖像進行了分析。
1材料與方法
1.1試驗方法本試驗采用高速攝像儀(最高可達10 000幀/s)拍攝山羊在坡地的行走過程。試驗過程中,由人牽引山羊,確保它在坡地上始終以直線狀態(tài)行走,以減小拍攝誤差,避免處理圖像數(shù)據困難。固定攝像機于三腳架上,設置鏡頭于山羊前進運動的正側面,并對攝像機的空間位置、取景范圍、拍攝距離、光圈和焦距等硬件條件進行調整,保證鏡頭主光軸對準山羊運動范圍的中心,盡可能地靠近山羊運動平面,使得山羊能夠清晰成像。調整高速攝像儀,確保拍攝速度與不同坡地的山羊運動相適應,記錄下山羊在36°坡地的運動序列圖像并儲存至計算機中,然后利用SigmaScan圖像軟件采集分析山羊軀體關鍵點的數(shù)據,得出山羊在不同坡地運動中的對應系列特征參數(shù)及曲線。
1.2試驗對象
山羊屬于偶蹄目,主要有頭、頸、軀干和四肢組成。頭部堅實,頸部與軀體、前肢良好結合,胸寬且深,肋骨張開,背腰寬厚平直,后軀寬長豐滿,四肢強健,結構勻稱,高度適中。試驗對1頭母山羊(1.5年)進行了分析,其主要體態(tài)特征列見表1。試驗地點為河南省洛陽市郊區(qū)山坡,氣溫為32~35 ℃。
1.3試驗設備
試驗所用的儀器設備分為3類:第1類測試設備,包括高速攝像儀(FASTCAM-Super 10K,用于拍攝山羊運動過程)、傾角儀、機械磅秤(XSJ 2×1300W-2O,用于山羊稱質量)等;第2類照明設備,包括新聞燈(MODEL10000,用于攝像輔助光源);第3類數(shù)據處理設備,包括微型計算機、筆記本電腦和打印機等。
1.4試驗數(shù)據處理方法
從試驗拍攝的圖像中抽選出具有完整步態(tài)周期的序列圖像,利用SigmaScan圖像軟件處理圖像數(shù)據[6-8],并將測得的山羊四肢關鍵點的相對坐標值和對應關節(jié)處的角度值保存為Excel文件格式,然后將Excel數(shù)據導入Matlab軟件對數(shù)據進行處理,最終得到山羊運動特征數(shù)據與曲線圖[9-10]。
2結果與分析
2.1山羊步態(tài)周期分析
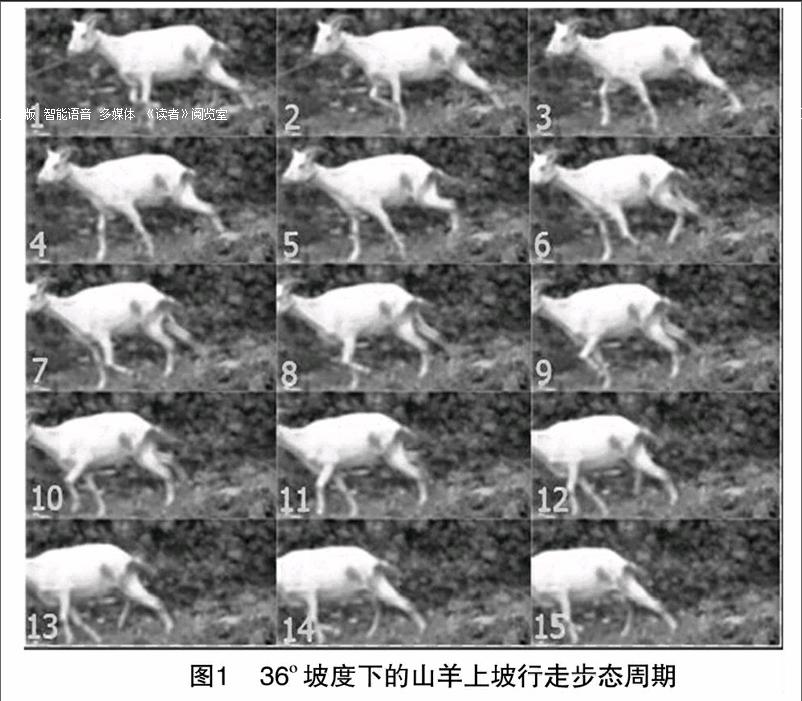
以每2幅圖片之間的時間間隔70 ms(即8幀)來選取1個完整的山羊步態(tài)周期圖(圖1)。其中,山羊在此坡度上完成1個完整的步態(tài)周期需要花費440 ms(共44幀)。試驗中觀察到的山羊的行走步態(tài)為靜步態(tài)和對角小跑步態(tài)的交替運行。
1個完整的步態(tài)周期內,山羊在36°坡地上行走對應的行走速度為71.1 cm/s,行走步距127.5 cm。1個完整的步態(tài)行走周期內,山羊在36°坡地上行走所對應的單腿跨距、單腿步距、負荷因數(shù)見表2。
由表2可知,在上坡過程中,山羊各腿的負荷因數(shù)為0645±0.205,即腿處于支撐相的時間遠大于處于移動相的時間。說明總體上山羊各腿處于支撐相時需要較多的時間來穩(wěn)定重心,當各腿處于移動相時,在空中處于擺動狀態(tài)的各腿可產生慣性力矩,移動相時間較短可減少慣性力矩對身體的影響,加快與支撐相腿交換頻率,從而增加身體的穩(wěn)定性。
由圖2可知,山羊在36°坡地上向上行走過程中,走完1個步態(tài)變換周期共經歷了4次3腿共同支撐時期。右前腿懸空時,其他3條腿處于支撐狀態(tài),此過程經歷了480 ms;身體逐漸前移,右前腿邁步準備著地時,左后腿離地(即兩腿處于短暫的懸空狀態(tài)),左前腿與右后腿仍處于支撐狀態(tài)時(對角小跑步態(tài)),此過程經歷了80 ms;隨后左后腿懸空,其他3條腿處于支撐狀態(tài),此過程經歷了200 ms;隨之左前腿懸空,其他3條腿處于支撐狀態(tài),此過程經歷了180 ms;身體逐漸前傾,重心前移,左前腿邁步準備著地時,右后腿離地(即兩腿處于短暫的懸空狀態(tài)),右前腿與左后腿仍處于支撐狀態(tài)時(對角小跑步態(tài)),此過程經歷了120 ms;之后,右后腿懸空時,其他3條腿處于支撐狀態(tài),此過程經歷了320 ms;接著右前腿懸空時,其他3條腿處于支撐狀態(tài),此過程經歷了 480 ms。至此山羊完成了1個完整的步態(tài)變換周期。隨著1個步態(tài)周期的完成后,山羊的身體接著前移,右前腿邁步準備著地時,左后腿離地(即2條腿處于短暫的懸空狀態(tài)),左前腿與右后腿仍處于支撐狀態(tài)時(對角小跑步態(tài)),此過程經歷了60 ms;隨后左后腿懸空,其他3條腿處于支撐狀態(tài),此過程經歷了280 ms。如此反復,形成了山羊的穩(wěn)步行走[11-14]。
1個完整的步態(tài)周期內,山羊的各條腿支撐時期占整個步態(tài)運動周期的比例見表3。
通過上述研究發(fā)現(xiàn),山羊在36°坡地上的上坡運動中總共經歷3腿共同支撐時期4次;對角小跑步態(tài)2次;對角小跑所占用的懸空時間遠小于3腿支撐所占用的懸空時間;隨著山羊從坡底到坡頂過程中,對角小跑所占用的懸空時間越來
越小。本試驗條件下可認為山羊在36°坡地的上坡運動過程中主要為3腿共同支撐和對角小跑狀態(tài)。
2.2山羊腿部角度分析
測得山羊36°坡地上坡各腿的腿部角度變化范圍值見表4。
對山羊行走的1個步態(tài)周期的試驗數(shù)據進行處理,得到山羊坡地行走時4條腿腿部角度變化曲線(圖3)。其中,α角均表示為山羊在行走過程中大腿和小腿之間的夾角,即腕關節(jié)角度,β角均表示為山羊在行走過程中大腿與前進方向的夾角,即大腿與水平前進方向的夾角[11]。
山羊36°坡地上坡行走過程中各腿的腿部角度變化結果如下。左前肢:左前肢在后屈離地抬起到前伸邁步著地的過程中,β角的曲線隨著α角曲線的增大而增大、減小而減小;當α角處于峰值和低谷時,β角的值也處于對應的峰值和低谷處,說明在邁步運動過程中比較平穩(wěn)。左后肢:左后肢在前屈離地抬起到前伸邁步著地的過程中,當α角處于最大值時,β角處于最小值;當α角第1次處于低谷時,β角為最大值。右前肢:右前肢在后屈離地抬起到前伸邁步著地的過程中,β角的曲線基本隨著α角曲線的變化而變化,說明運動比較平穩(wěn)。右后肢:右后肢在前屈離地抬起到前伸邁步著地的過程中,α角較β角變化平穩(wěn),當α角第1次出現(xiàn)峰值時,β角出現(xiàn)第1次的低谷現(xiàn)象;當α角第3次出現(xiàn)峰值時,β角出現(xiàn)再次的低谷現(xiàn)象;β角出現(xiàn)最大值時,α角處于平緩狀態(tài);此后,當α角處于最大值時,β角處于低谷。
3結論
對山羊坡地行走試驗過程和試驗方法進行了研究,重點分析了圖像處理軟件SigmaScan在高速攝像中的應用方法,并對山羊身上的關鍵點進行了運動學數(shù)據采集和歸類,獲得了較完整的運動學數(shù)據參數(shù),為步態(tài)分析提供了研究基礎。
利用SigmaScan軟件處理分析了存入計算機的實驗序列圖像,得出山羊36°坡地上的運動步態(tài)特性參數(shù)和坡地運動過程中各腿腿部的角度變化曲線及規(guī)律性,為仿山羊坡地行走機構的設計提供了基礎試驗數(shù)據。
在本試驗條件下可認為山羊在36°坡地的上坡運動過程中主要為3腿共同支撐和對角小跑狀態(tài)。
分析表明,山羊各腿的負荷因數(shù)為0.645±0.205,即腿處于支撐相的時間遠大于處于移動相的時間,說明山羊各腿的支撐相大于移動相,這種特點可增加山羊運動的穩(wěn)定性。
參考文獻:
[1]張伏,張國英,毛鵬軍. 山羊軀體結構與影響步態(tài)運動因素的研究[J]. 農機化研究,2012,34(1):51-54.
[2]王建明,趙彥,朱彥防,等. 基于ADMAS與MATLAB的四足機器人的trot步態(tài)聯(lián)合仿真[J]. 機床與液壓,2015(3):57-59.
[3]Autumn K,Hsieh S,Dudek D,et al. Dynamics of geckos running vertically[J]. The Journal of Experimental Biology,2006,209(Pt 2):260-272.
[4]孫祥一,胡建,王鯤鵬,等. 高速攝像三維圖像分析技術與應用[J]. 宇航計測技術,2010,30(6):30-34,44.
[5]李杰. 大型六足仿生平臺機器人機構設計及運動仿真[J]. 機械工程師,2014(10):178-180.
[6]賈蘊琪,曹致中,王赟文,等. 基于數(shù)字影像處理技術的結縷草秋
季枯黃動態(tài)分析研究[J]. 草業(yè)學報,2009,18(3):94-102.
[7]王立東,王良意,楊海濤,等. SigmaScan Pro 5軟件在脊柱影像測量分析中的應用[J]. 中國醫(yī)師進修雜志,2007,30(增刊1):90-91.
[8]劉冠初,熊靜琪,喬林,等. 四足機器人自由步態(tài)規(guī)劃建模與算法實現(xiàn)[J]. 西安交通大學學報,2015,49(6):84-89,144.
[9]Pa P S. Design of a modular assembly of four-footed robots with multiple functions[J]. Robotics and Computer-Integrated Manufacturing,2009,25(4/5):804-809.
[10]江勵,管貽生,蔡傳武,等. 仿生攀爬機器人的步態(tài)分析[J]. 機械工程學報,2010,46(15):17-22.
[11]肖世旭. 大壁虎的三維步態(tài)實驗及分析[D]. 南京:南京航空航天大學,2006.
[12]王洪波,徐桂玲,胡星,等. 四足并聯(lián)腿步行機器人動力學[J]. 機械工程學報,2012,48(23):76-82.
[13]譚小群,李軍,趙國斌,等. 一種重心調整裝置在四足機器人步行中的應用[J]. 中國制造業(yè)信息化,2008,37(23):25-28.
[14]謝惠祥,羅自榮,尚建忠.四足機器人對角小跑動態(tài)控制[J]. 國防科技大學學報,2014(4):146-151.
